基于γ修正的转捩模型汽车后视镜啸叫理论研究与试验验证
2021-07-05吴海波周江彬
吴海波,邢 鹏,周江彬
(上汽大众汽车有限公司产品研发部,上海 201805)
前言
汽车行驶时产生的噪声主要有发动机噪声、胎噪、进排气噪声和风噪。当车辆高速行驶时(车速达到120 km/h),风噪占据车内噪声的主导地位,消费者在风噪较大的声环境下很难有较好的驾乘体验和声品质感受[1]。因此,研究和降低风噪(气动声学)成为控制高速车辆噪声的关键技术之一。
道路试验、风洞试验和CFD仿真计算是整车气动声学研究的主要技术手段。在整车研发前期阶段,道路试验受限于样车需求无法进行;风洞试验测试精度高,但国内风洞资源紧张,测试费用高,而且在整车研发前期阶段需要油泥模型支持[2]。随着计算机技术的飞速发展和高速计算机的出现,利用CFD仿真技术来模拟整车气动声学声变得经济可行。汽车后视镜作为影响整车外流场的重要部件,其风噪问题一直备受关注。国内外研究学者对后视镜对风噪性能的影响做了大量的研究,大致可以分为两类:后视镜气动噪声和后视镜啸叫。
后视镜气动噪声从单独研究放在平面上后视镜的简化模型,分析简化后视镜在平面上的流场分布,获得监测点的压力系数和声压频域,定量定性地研究后视镜尾部气流对气动噪声的影响,逐渐发展到将复杂后视镜模型放置在研究车辆上,研究后视镜对侧窗的压力波动影响,确定声源位置,研究噪声产生机理,越来越倾向于实际后视镜造型,这样可以更加清晰地描述后视镜产生的噪声原因,更加高效地提出降噪优化方案[3]。而且,随着CFD数值模拟的发展和计算机性能的提高,整车气动噪声分析可以通过稳态计算和瞬态计算获得汽车外流场的气动噪声信息,结合统计能量分析方法(statistic energy analysis,SEA)获得车内噪声。目前对于气动噪声的分析已经非常成熟,也形成了比较完善的仿真和试验体系。
然而对于汽车后视镜的啸叫问题还没有全面、系统的研究体系。关鹏等[4]将后视镜的啸叫声总结为两类,一类是边界层转捩,一类是气流与凹槽结构之间的周期性反应,并通过仿真计算与试验相结合的方法对噪声进行了分析与优化。Lounsberry等[5]采用稀薄的油进行了尝试,清晰地看到了层流啸叫的变化(出现,然后短暂消失)与油波变化一致,试验验证了流体边界层分离是啸叫产生的重要原因。黄丽那[6]在风洞试验中采用油膜法对车身纵向对称面和后视镜侧窗位置进行了流态观察,但并没有对后视镜处表面的流动现象进行观察和分析。
以上研究较依赖风洞试验,没有从理论方面对后视镜啸叫产生的机理进行深入的研究。本文中以某款油泥模型车后视镜为研究对象,提出基于γ修正的转捩模型汽车后视镜啸叫理论,并通过试验验证其啸叫理论方法模拟的准确性。
1 基于γ的SST转捩模型方程
本文中计算啸叫的仿真模拟采用SST转捩模型,它主要用于模拟边界层中层流占比较大且对整体结果有影响的湍流流动,主要用于中等雷诺数下的外流场[7]。
κ-ωSST模型的输运方程为

式中:Pκ和Dκ分别代表了湍动能κ的产生项和耗散项;F1为用于控制κ-ωSST模型的混合函数。
κ-ωSST模型只适用于湍流边界层,对于层流边界层和转捩区域需要修改湍动能的产生项与耗散项,因此引入湍流间歇度γ(turbulence intermittency),它表征边界层中湍流脉动的时间比[8]。γ表征流体流动状态如图1所示。
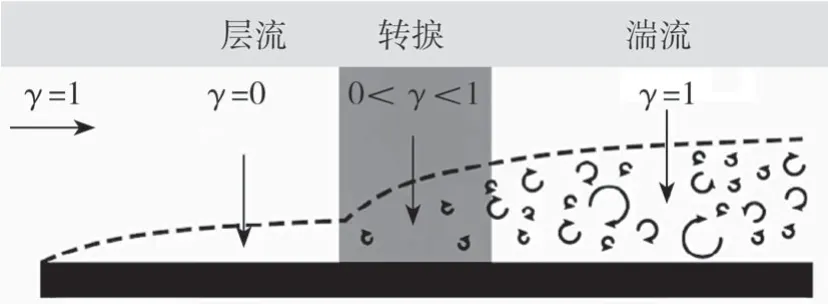
图1 γ表征流体流动状态示意图
SST转捩模型中,Pκ和Dκ分别被修正:

当γ=1时,边界层为湍流,Dκ与κ-ωSST模型保持一致;当γ=0时,边界层处于层流,此时Dκ并不为0,而被限制为湍流边界层中Dκ的10%,这样可以确保自由流中传播过来的湍动能依然能被壁面耗散掉[9]。
混合函数F1在层流边界层中会从1切换为0,此时使用κ-ε模型,然而κ-ε模型对贴壁面流动的模拟并不精确,特别是当y+(第一层网格质心到壁面的无量纲距离)较小时,因此在SST转捩模型中需要对F1进行修正:

湍流间歇度γ的产生项Pγ控制转捩区域的长度,其定义为

式中:κ为湍动能;Reυ为涡度雷诺数;RT为黏度比;μ为黏度;ρ为密度;Reθ,t为转捩起始动量厚度雷诺数。
动 量 厚 度 雷 诺 数Reθ(momentum thickness Reynolds number)定义为
对于边界层内的速度剖面,沿着壁面的法向方向速度从0过渡到U∞。当使用均匀的速度剖面时(壁面法向速度不变,均为U∞),为了保证两个速度剖面的动量一致,结构壁面必须向流场内偏移一定的距离,这个偏移量即为动量厚度θ[12],如图2所示。

图2 动量厚度说明图

图3 动量厚度雷诺数变化示意图

2 后视镜流场仿真结果分析
2.1 整车外流场计算
本文中研究内容定位于某款SUV车型后视镜的啸叫问题。由SST转捩模型理论可知,边界层层流-湍流转捩现象是一个过程,而非突现的转变现象。层流边界层受到来流中的扰动(声波或脉动压力),或者模型表面粗糙度诱导形成二维波(tollmien⁃schlichting,T⁃S),然后经非线性相互作用,诱导产生不稳定的三维扰动,发生二次失稳。在转捩过程中,可能会有一部分能量转化为声波向空间四周传播,声波扰动的能量可以促进后视镜前端附近的层流转化为湍流,激发的湍流流动到后视镜尾端又会补充该区域的声波能量[15]。声波与湍流之间如此反复作用,在后视镜表面形成了一个声激励与声传播的循环过程(T-S循环),这个过程产生高次谐波及高阶不稳定性,在某一频组上表现为一组离散的峰值频率,这个喜马拉雅似的尖峰经常被称为口哨声或啸叫声。
本文中采用SST转捩模型方程对整车外流场进行数值模拟(速度125 km/h,偏航角-5°),分别从动量厚度θ、湍动能κ和剪切力(或者表面摩擦因数cf)3个方面来评估后视镜区域的流体变化和预测后视镜啸叫产生的可能性。
2.2 仿真结果分析
后视镜后部尾涡区域气流变化是啸叫产生的主要区域,本文中采用OpenFOAM软件对整车进行数值仿真计算,得到后视镜区域的流场结果。图4~图6所示为汽车后视镜在Y=900 mm截面处的仿真分析云图。
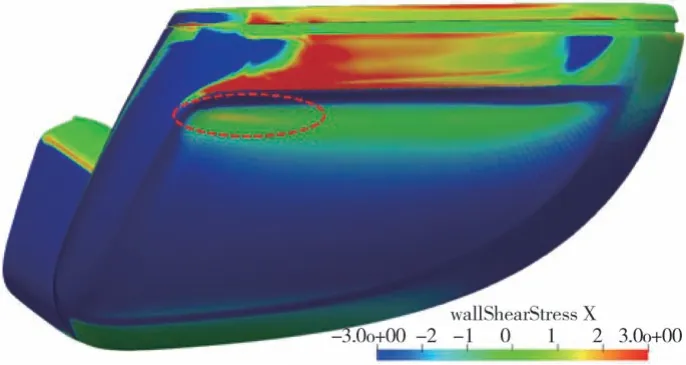
图4 后视镜剪切力云图
从图4可以看出,气流沿X轴正方向流动,到达后视镜时,后视镜表面剪切力由负值转变为正值(红框选中区域内颜色变化)。这说明壁面附近气流在运动过程中受到壁面摩擦力和压差力的作用,速度逐渐降低且接近为零。但由于压差力的存在,气流开始反向运动,这在宏观流动上体现为倒流,两股速度方向相反的气流交汇使边界层内的流体向上抬起,引发边界层分离。
图5所示是后视镜在Y=900 mm处速度云图。从图5(b)局部放大速度云图可以看出,边界层贴近后视镜壁面的动量厚度随着流体速度变小而不断增厚,增加到最大的动量厚度时,速度减小为零,此时层流边界层在剪切力的作用下开始分离。随着边界层分离,层流边界层开始转变成湍流,湍流边界层气流紊乱,动量厚度逐渐减小,甚至消失为零。
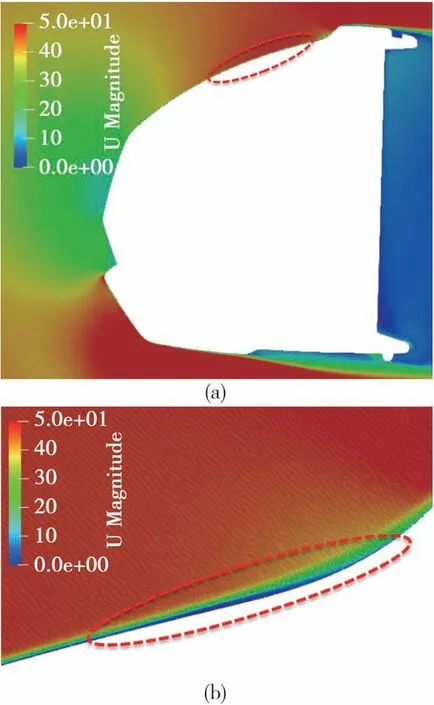
图5 后视镜速度云图(Y=900 mm)
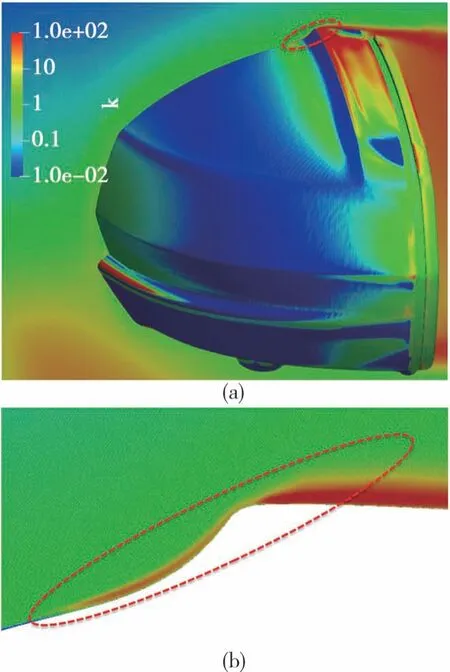
图6 后视镜湍动能云图(Y=900 mm)
图6所示是后视镜在Y=900 mm处湍动能云图。从图6中可以看出,湍动能在分离区域能量较大,这说明此处的湍流较为剧烈,可能存在外部声波扰动,声波扰动的能量可以促进后视镜前端附近的层流转化为湍流,激发的湍流流动到后视镜尾端又补充该区域的声波能量,因此判断此处发生啸叫的可能性较高。
3 试验验证测试
3.1 测试平台
为了验证本文后视镜气动噪声啸叫风险,选择在同济大学上海地面交通工具风洞中心整车气动声学风洞中进行。该风洞是3/4开口回流式风洞,其喷口3边自由1边接地,喷口面积为27 m2。测试时将试验车放在风洞驻室试验段天平转盘的中心位置固定。试验过程中风洞边界层抽吸和移动带系统关闭[16]。
3.2 试验方法
为探索油泥车型后视镜啸叫问题,将试验设计成两部分:整车外流场传声器测试和声阵列成像测试。前者采集整车外流场信号,确定啸叫是否存在及啸叫产生的频段;后者确定啸叫产生的位置。
(1)整车外流场试验设置
在垂直于风洞中天平转盘对称线(风速方向)且通过转盘中心的线段,与从喷口末端边缘对称点向左(右)呈45°,最大不超过60°夹角射线的交汇处,布置一个自由场传声器作为外场参考测点,离地高度为1.2 m,用于测量外部声场噪声,如图7所示。

图7 外流场传声器测试位置
(2)整车外流场试验设置
为验证啸叫声的产生与后视镜相关,本文中采用声阵列对整车右侧进行声成像法测试,如图8所示。声阵列是由一系列声学采集设备做成的一种可视化的声学测试装置,可生成声学图像或动画,定位声源点。此次风洞测试,是将120通道螺旋形阵列放置在整车右侧不受高速气流影响的地方,分别对前格栅、轮胎和后视镜区域进行成像扫描,测得各个区域的气动噪声分布[17]。

图8 声阵列
3.3 测试结果分析
对油泥车进行风洞测试前,首先进行主观评价,分别选择120、125、130和140 km/h风速,偏航角分别为-5°、0°和+5°。在整个测试过程中,偏航角为-5°,风速从125 km/h开始,整车右侧外流场听到明显的啸叫声,随着速度的增加,啸叫声逐渐减弱。为验证主观评价结果,选择测试风速125 km/h、偏航角-5°的工况进行啸叫试验研究,测试时间为10 s,噪声分析频率范围为500-10 000 Hz,FFT测试结果如图9所示。
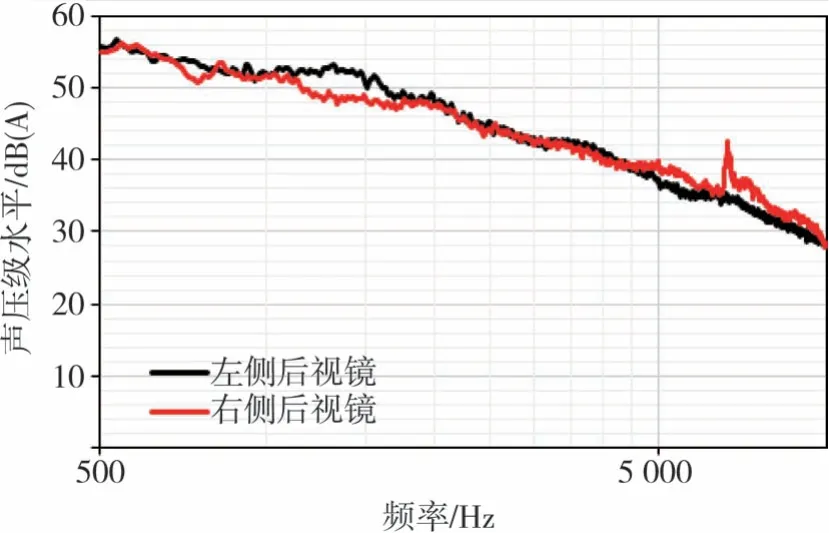
图9 整车右侧外声场声压级曲线
从图9中可以看出,整车右侧外声场声压级水平随着频率的增大逐渐减小,但在6 668 Hz时出现噪声峰值,声压级为42.48 dB(A),比左侧外流场声压级高出8.3 dB(A),且通过在风洞中的主观评价测试,人耳能够清晰地听到刺耳的噪声,长时间出于此噪声环境,容易让人产生烦躁感,因此,可以认为整车右侧声场存在啸叫声,这也验证了仿真模拟预测啸叫的准确性。根据声阵列测试结果(见图10),最终确定后视镜影响的噪声区间内(6 149-7 095 Hz)出现噪声峰值。
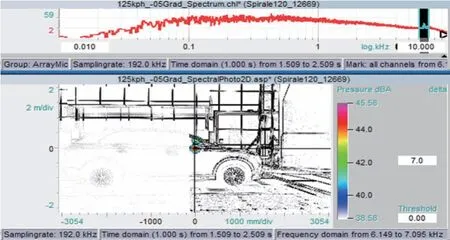
图10 基础车型声学成像测试结果
由图10可以看出,声学照相机成像结果与外声场测试的声压级曲线出现的噪声峰值一致,充分说明了外流场曲线6 668 Hz的峰值来源于后视镜啸叫。这证实了采用基于湍流间歇度γ修正的SST转捩模型预测啸叫的有效性和准确性。
4 结论
为准确预测汽车后视镜啸叫,本文中基于开源软件OpenFOAM,对整车外流场进行数值模拟仿真计算,并将κ-ωSST转捩输运函数为基础,引入湍流间歇度γ,分别从动量厚度θ、湍动能κ和剪切力(或者表面摩擦因数cf)3个方面来评估后视镜区域的流体变化和预测后视镜啸叫产生的可能性,而且通过风洞试验验证了仿真模拟的准确性,主要结论如下。
基于湍流间歇度γ修正的SST转捩模型可以通过剪切力(或者表面摩擦因数cf)和动量厚度θ云图可准确预测层流边界层转捩、分离、再附着的流动现象,结合湍动能κ可以明确湍流加剧产生的原因,可以有效预估啸叫产生的风险,并且仿真预判结果与风洞试验测试结果一致,验证了该方法的可行性和准确性。同时,基于湍流间歇度γ修正的SST转捩模型还可以判断后视镜不同Y值范围内啸叫产生的风险大小。该方法为汽车前期研发阶段规避汽车后视镜啸叫问题提供了一定的指导依据,有效减少了开发周期和降低后期实车风洞测试的试验成本。
然而,目前汽车后视镜啸叫分析的理论研究较少,还没有成熟的相关理论,本文中提出的汽车后视镜啸叫仿真分析方法还需要大量的案例进行验证,这也是下一步要研究的课题。
