典型车联网基本安全消息机制分析
2021-06-16马佳荣王润民张晋崇张志恒
马佳荣,王润民,张晋崇,张志恒
(1. 西安文理学院 信息工程学院,西安 710065;2. 长安大学 车联网教育部-中国移动联合实验室,西安 710061;3. 中国汽车技术研究中心有限公司,天津 300300;4. 空军工程大学 防空反导学院,西安 710043)
基本安全消息[1](Basic Safety Message,BSM)是在车联网与智能网联汽车应用中,基于无线通信按固定周期向外部车辆或路侧感知设备传播车辆基本参数和运行状态的一种消息。目前,多个标准化组织均给出了BSM的定义:美国汽车工程师学会(Society of Automotive Engineers,SAE)定 义 车联网BSM为一种综合考虑车辆状态,在车辆间进行交换的、用于多种应用的、描述车辆状态的安全数据。这一数据类型周期性地向邻居车辆发送包含有安全应用及其他应用所需的数据。欧洲电信标准化协会(European Telecommunications Standards Institute,ETSI)将BSM定义为合作式感知消息[2](Cooperative Awareness Message,CAM),是借助周期性发送数据包以帮助道路使用者和路侧基础设施感知彼此的一种消息类型。中国汽车工程学会(China Society of Automotive Engineers,China-SAE)标准中的车辆基本安全消息被定义为,一个使用最广泛的应用层消息,用来在车辆之间交换安全状态数据。
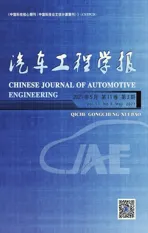
车辆通过对BSM进行广播,将自身的实时状态告知周围车辆,以此支持一系列系统安全等应用。如图1所示,作为一个典型的前向碰撞预警(Forward Collision Warning,FCW)场景,当主车(Host Vehicle,HV)在车道上行驶,与在正前方同一车道的远车(RV-1)或在相邻车道进行变道行驶的远车(RV-2)存在追尾碰撞危险时,RV-2可借助BSM将当前行驶状态告知HV、RV-1和路侧设备(Road Side Unit,RSU),提示HV进行减速或变道行驶操作,提示RV-1进行加速或变道行驶操作,以避免三车发生连续碰撞。RSU对BSM中的数据可进行进一步的广播和上传处理。BSM的生成和传递一般采取周期性的、单跳点对多点广播方式。
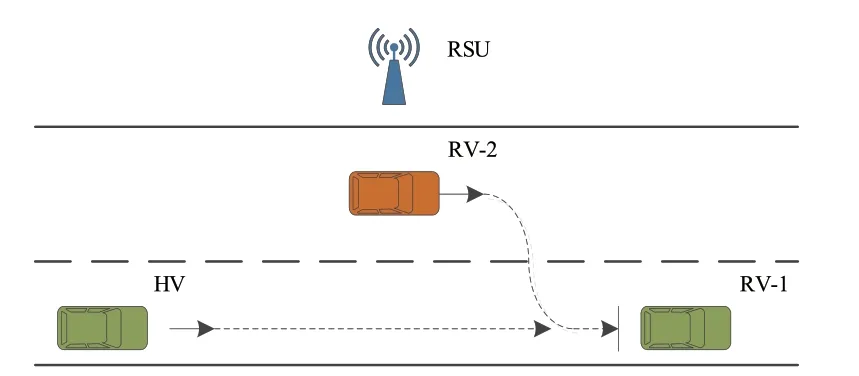
图1 前向碰撞预警场景
对于车联网与智能网联汽车安全应用而言,为了避免发生车辆碰撞等事故,需要车辆获取实时性更高、准确性更强的邻居车辆状态信息,这需要利用较高的BSM生成和传递频率。然而,为保证不造成车联网信道拥堵,BSM生成和传递频率应保持在适当较低的水平。因此,制定完善的BSM生成传播机制是车联网与智能网联汽车安全应用研究和部署过程中的首要环节,以保证BSM消息能满足各项车联网与智能网联汽车的应用需求。
为解决上述问题,美国、欧洲和中国等多个国家和地区的标准化组织,在构建的车联网体系架构基础上,开展了一系列关于BSM消息的标准化工作,对BSM消息集进行了定义,并根据不同应用进行了相应的需求分析。2016年,SAE发布了专用短程通信(Dedicated Short Range Communication,DSRC)消息最小性能需求——车辆安全应用中的基本安全消息标准SAE J2945.1[3],给出了BSM消息的推荐使用规则。同年,SAE发布了基于5.9 GHz DSRC的车联网应用消息集标准SAE J2735[4],明确了最终的消息结构、数据帧和数据元素。2014年,欧洲ETSI组织发布了ETSI TS 102 894-2[5]标准,对智能交通系统应用层、设备层的通用数据集进行了定义,在此基础上,2018年,ETSI发布了ETSI EN 302 637-2标准草案,给出了CAM的推荐发送机制和数据格式。2017年,China-SAE发布了车用通信系统应用层及应用数据交互标准T/CSAE 53—2017[6],明确了车用通信系统的应用类型,定义了BSM数据集、数据帧、数据元素和对应的服务接口。
上述有关BSM的标准因不同国家/地区政策以及所选的不同通信技术呈现出一定程度的差异。本文通过对几种典型的车联网通信协议进行介绍,对不同车联网体系架构下的底层框架和现行标准进行了梳理。然后,就不同地区的研究组织对车联网频段、信道的具体划分进行了明确。在给出了BSM消息定义的基础上,对不同标准中的BSM数据结构进行了详细剖析,并在网络层和接入层层面上分析了BSM机制中涉及的两个重要传输参数和当前BSM发送机制的研究现状。最后,围绕车联网BSM机制中涉及的发送频率、发送功率参数设定和基于交通感知的动态车联网BSM动态生成及传播机制的研究现状进行了讨论和分析。相关研究成果可以支撑面向交通感知的BSM生成及传播机制的进一步研究。
1 典型车联网通信协议
1.1 基于802.11p的DRSC通信协议
1.1.1 WAVE车联网通信协议
1999年,美国联邦通信委员会(Federal Communications Commission,FCC)提议将5.9 GHz频谱处的75 MHz专门用于支持高速移动环境中车辆与车辆(Vehicle to Vehicle,V2V)、车辆与路侧设备(Vehicle to Infrastructure,V2I)间的通信。2010年7月,美国电气和电子工程师协会(Institute of Electrical and Electronics Engineers,IEEE)在802.11a协议的基础上,率先发布了车联网技术的底层协议802.11p[7]。随后,IEEE相继发布了IEEE 1609.2、IEEE 1609.3、IEEE 1609.4[8]系列标准,定义了MAC层以上的高层通信协议栈,并就此搭建了5.9 GHz频谱处DSRC/WAVE的标准体系框架[9]。WAVE体系结构如图2所示。

图2 WAVE体系结构
1.1.2 ITS-G5车联网通信协议
在IEEE 802.11p标准的基础上,2010年,ETSI发布了其在5 GHz频段上的智能交通系统物理层和MAC层标准,定义了其基于802.11p框架下的ITS-G5协议栈框架,并对其通用需求进行了解释[10]。同年9月,给出了智能交通系统体系框架标准,明确了智能交通系统通信架构[11](Communications for Intelligent Transport Systems,ITSC)。2014年,发布了智能交通系统应用层、设备层的通用数据集,并明确了系统中的应用需求。ITS-G5协议栈体系架构如图3所示。
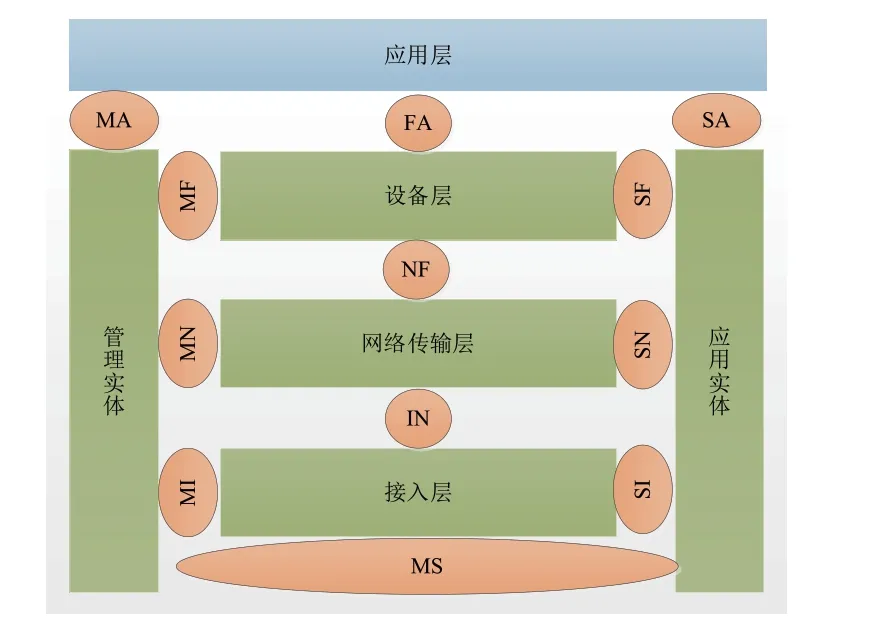
图3 ITS-G5协议栈体系架构
1.1.3 日本DSRC通信协议
日本的DSRC体系与美国相似,1997年,日本无线工业及商贸联合会(Association of Radio Industries and Businesses,ARIB)发布了面向交通信息和控制系统的DSRC标准,通过选取开放系统互联基本参考模型[12](Open Systems Interconnection Basic Reference Model,OSI/RM)中的物理层L1、数据链路层L2和应用层L7,搭建了DSRC的基本通信框架,并将L3、L4、L5、L6层的功能在L7层中进行了标准化整合。2001年发布的标准则对DSRC系统中不同设备间的无线空中接口参数进行了定义和明确。
1.2 基于蜂窝通信的C-V2X通信协议
移动通信技术的快速发展使车联网技术实现超大带宽、低延时可靠通信、移动终端海量连接成为可能。自2015年以来,国际通信标准组织(the 3rd Generation Partnership Project,3GPP)相继推出了包含有长期演进-车联网(LTE-V2X)和5G-V2X的C-V2X技术。在完成基于LTE PC5接口的V2V(PC5-Based V2V)的标准化工作和基于LTE Uu 接口的V2X的标准化工作的基础上,3GPP无线电接入网(Radio Access Network,RAN)组织于2017年3月冻结了3GPP LTE Rel-14[13]的V2X标准化工作,实现了对基于LTE技术,并满足LTE-V2X基本业务需求的RAN物理层标准的设计。
3GPP LTE Rel-14主要针对的是现阶段辅助驾驶的应用需求。针对未来自动驾驶的应用需求,3GPP组织自2016年逐步推进了一系列关于5G-V2X的标准化工作。2018年6月,3GPP RAN组织完成了面向5G-V2X应用用例的评估方法研究,并对评估场景进行定义,明确了6 GHz以上的Sidelink信道模型。同年,启动了“基于5G新空口(NR)的V2X(Rel-16)”工作,旨在通过增强多进多出(Multiple Input Multiple Output,MIMO)使毫米波频段的有效性得到提高,同时,3GPP Rel-16针对NR Sidelink的物理层架构、传播方式、同步机制进行了设计,并根据NR Uu接口对5G-V2X应用的适用情况进行了增强。此外,对无线接入技术的选择机制进行了明确,并给出了空口服务质量管理技术方案。
在中国,随着4G/5G蜂窝通信网络的大规模铺设,中国通信标准化协会(CCSA)、中国智能交通产业联盟(C-ITS)和China-SAE等组织积极开展了LET-V端到端的标准体系构建工作。2017年,China-SAE发布了车用通信系统应用层及应用数据交互标准,参照国际标准化组织制定的通信系统七层参考模型和美国、欧洲主流的车用通信系统架构,中国车用通信系统主要包括系统应用、应用层、传输层、网络层、数据链路层和物理层。通过向下制定与不同通信设备对接的服务提供接口(SPI),该标准可实现对包含有DRSC和3GPP LTE-V2X等不同通信方式和多种通信设备的兼容。China-SAE数据交互标准的通信技术兼容范畴说明如图4所示。

图4 China-SAE标准的通信协议兼容范畴
2019年7月,欧盟正式发布声明,否决了此前由欧盟委员会提出的指定DSRC为未来车联网技术的方案。2020年,ETSI获批的最新标准EN将C-V2X作为智能交通系统(Intelligent Transport System,ITS)终端的接入层技术。与此同时,通过对接入层之上的全部ETSI标准系列和规范进行更新,当前所有ETSI标准均可支持基于C-V2X技术的接入层协议。上述标准和规范目前已形成ETSI ITS Release1规范集,是帮助行业相关厂商未来开发C-V2X ITS解决方案和终端的基础。
此外,2019年12月,美国联邦通信委员会(Federal Communications Commission,FCC)通过了重新分配5.9 GHz频谱的提案,并将其中20 MHz频段专用于C-V2X技术。
1.3 车联网通信协议特性对比
基于目前国际上主流车联网通信协议分析结果可以认为,目前世界上主流车联网通信协议基本上是以IEEE主导的IEEE 802.11P为核心的DSRC和3GPP 发起制定的以LTE-V和未来5G NR为主的C-V2X。本节主要对上述两种通信协议特征进行对比。

表1 典型车联网通信协议特征对比
如表1所示,C-V2X技术[14]与802.11p技术[15]相比,主要差异表现在以下几个方面:首先,两者通信方式不同,802.11p技术采用的是异步通信,C-V2X技术则使用同步通信,由于同步通信具有较低的信道访问开销,因此,C-V2X技术具有更高的频谱效率;其次,相比802.11p技术,C-V2X技术在跨车辆的资源多路复用技术中,可灵活使用频分 复 用(Frequency Division Multiplexing,FDM)和时分复用(Time Division Multiplexing,TDM)两种方式,在相同范围内具备更多的链路预算;再次,C-V2X技术使用Turbo编码并在上行链路中使用单载波频分多址(SC-FDM)技术,有效地提高了频谱的利用率和速率;最后,C-V2X技术支持混合自动重传请求(Hybrid Automatic Repeat Request,HARQ)的重传机制,可实现数据更远距离的传输[16]。
1.4 国际车联网通信标准进展分析
目前,世界上多个国家或地区的政府或标准化组织围绕IEEE 802.11p和LTE-V制定了关于所在区域内的车联网通信标准体系,见表2。由表2可知,无论是IEEE 802.11p还是C-V2X技术,目前均已完成了阶段性的技术研究和标准化制定。

表2 主流车联网通信标准汇总
DSRC作为车联网的主流通信技术得到众多关注和发展。然而,由于DSRC依赖较大基础设施的部署数量,致使系统的建设和运行成本显著增加。同时,DSRC物理层存在异步通信的固有缺陷,且针对物理层的改进方案一直未出现较为明确的演进方向,车联网与智能网联汽车安全应用的及时性遭遇极大挑战。此外,车联网与智能网联汽车应用呈现多样化和复杂化,DSRC技术难以满足其对鲁棒性和可靠性的要求。考虑到移动通信技术的超大覆盖范围和稳定的通信质量,以及其明确的演进路线,利用蜂窝通信技术支持车联网应用完成数据交互的趋势愈发明确。因此,C-V2X技术得到越来越多的国家和地区,以及标准化组织的青睐,并在全球范围内形成一系列的标准成果。
尽管相关标准化工作、测试试验已陆续开展并取得一定成果,综合当前实际的产业进展情况,实现全面的基于5G–V2X技术的车联网及智能网联汽车应用仍需要一定的时间。现阶段LTE-V2X主要关注基础V2X业务,NR-V2X更多作为补充技术出现。
2 车联网载波频段和信道划分
2.1 载波频段
在发展电子收费系统(Electronic Toll Collection,ETC)技术的过程中,美国、日本、欧洲相继为车联网通信技术分配了相应的工作频段,其中,美国选择了5.9 GHz,日本、欧洲选择了5.8 GHz。1999年,美国FCC将5 850~5 925 MHz频段用于基于DSRC的智能交通业务,其中,5 850~5 855 MHz的5 MHz是预留的保护频段,余下的5 855~5 925 MHz频段根据业务进行平均分配。
20世纪90年代末,日本将5 770~5 850 MHz频段划分给DSRC,用于车辆信息与通信系统(Vehicle Information and Communication System,VICS)和ETC。2012年,ARIB发 布 的《700MHz Band Intelligent Transport Systems》规范中则将755.5~764.5 MHz频段规划给ITS的道路安全应用业务。
欧洲ETSI根据不同的应用需求,对5 GHz频段上的ITS系统无线电频谱资源进行了重新分配,其中,ITS-G5A(5.875~5.905 GHz)主要面向安全相关应用,ITS-G5B(5.855~5.875 GHz)主要面向非安全相关应用,ITS-G5C(5.470~5.725 GHz)主要面向使用其他通信技术(BRAN,WLAN)的应用。此外,ETSI还预留5.905~5.925 GHz以满足未来ITS应用的需求。
2013年,中国工业和信息化部发布的《关于调整5 725-5 850兆赫兹频段频率使用事宜的公示》中,将5 725~5 850 MHz频段规划为宽带无线接入系统、智能交通专用无线通信系统(包括ETC等)、点对点或点对多点扩频通信系统及通用微功率(短距离)无线电发射设备等无线电台站的使用频段。2018年,中国工业和信息化部出台《车联网直接通信使用5 905~5 925 MHz的管理规定》,明确规划5.9 GHz 频段作为基于LTE的C-V2X技术的车联网(智能网联汽车)直连通信的工作频段[17]。各国车联网通信技术频段如图5所示。
图5 各个国家和地区车联网通信技术频段
此外,2019年12月12日,FCC宣布重新分配了原本划分给DSRC的75 MHz无线电频谱资源——最下层的45 MHz(5.850~5.895 GHz)划拨给非授权技术使用,并向全社会开放;上层的30 MHz(5.895~5.925 GHz)将保留专用于运输和车辆安全,特别是其中的20 MHz(5.905~5.925 GHz),被划分为基于蜂窝网络的车联网通信技术(Cellular Vehicle to Everything,C-V2X)的专用频段。
2.2 信道划分
美国将5 855~5 925 MHz频段划分成了7个10 MHz信道,包括1个控制信道(Control Channel,CCH)、2个安全服务信道(Service Channel,SCH)和4个非安全服务信道。其中,控制信道用于传输服务声明信息和其他WAVE协议中的控制信息,服务信道则用于交换ITS应用相关信息。编号174、176的非安全服务信道可合并编号为175的20 MHz服务信道,编号180、182的非安全服务信道可合并编号为181的服务信道。对BSM而言,由于其采用WSMP封包格式,所以对部分应用程序而言,能够在不注册服务的情况下,使WSMP在所有控制信道和服务信道上完成发送任务。美国信道分布及编号如图6所示。
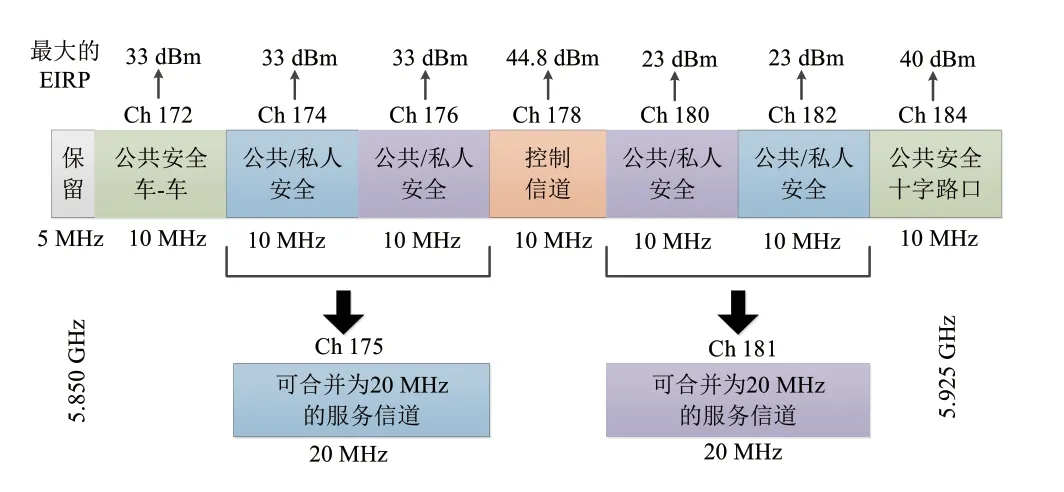
图6 美国信道分布及编号
欧洲ETSI组织在对信道进行分配时,同样将其分为1个控制信道(ITS-G5 Control Channel,G5CC)和5个服务信道(ITS-G5 Serbice Channel,G5SC),5个服务信道中有4个信道固定,剩余1个信道频段可变。与此同时,在使用上述6个信道时,需要遵循3个使用方案:一是G5CC应用于保证道路安全和提升交通效率,或用于为G5SC1至G5SC5信道上的ITS应用提供服务声明;二是G5SC1和G5SC2应用于保证道路安全和提升交通效率;三是其他ITS应用主要使用G5SC3、G5SC4和G5SC5。欧洲信道分布情况及编号见表3。

表3 欧洲信道分布及编号
中国当前对5 905~5 925 MHz频段内的信道划分还未给出官方说明。就国内目前已开展的基于5.9 GHz DSRC技术而言,其信道划分主要参照的是美国802.11p标准。
3 基本安全消息结构与传播机制
3.1 基本安全消息数据帧结构
3.1.1 SAE J2735标准数据帧结构
根据SAE J2735标准,消息由数据帧和数据元素构成。对BSM消息而言,主要包括BSM Part1和BSM Part2两部分数据帧。BSM Part1数据帧内写入的是coredata,每个BSM消息中都必须包含有BSM Part1数据;BSM Part2数据作为非必需数据帧,可根据不同应用需求和不同政策插入多个包含不同内容的数据帧,不包含BSM Part2数据的BSM仍被认为是合法消息。SAE BSM消息框架如图7所示。

图7 SAE BSM消息框架
作为SAE J2735标准中最重要的一种消息类型,BSM消息的BSM Part1数据帧需要准确写入包含有车辆位置、速度的动态信息,并通过提供系统的状态信息,为多种车间安全应用提供数据支持。BSM Part1包含的数据元素如图6所示。考虑到BSM消息对带宽消耗极为敏感,因此,除消息ID之外,其中的各项数据元素不单独进行递归编码。BSM Part1数据共39个字节。
相比BSM Part1数据,BSM Part2数据更具有灵活性,这主要表现在3个方面:一是总体上对数据的刷新频率要求比BSM Part1数据更低;二是对由新型传感器和新应用产生的新的状态信息数据具有更强的适用能力;三是可添加多种自定义消息。尤其是,在安全应用领域使用频率最高的BSM Part2数据元素有4种,分别是:报告事件触发的标识元素EventFlags、报告车辆节点路径历史的数据元素PathHistory、预估车辆节点路径的数据元素PathPrediction和以RTCM格式传输的GPS更正数据元素RTCMPackage。上述4种数据元素构成了BSM Part2数据帧VehicleSafetyExtension。
3.1.2 ETSI EN 302 637标准数据帧结构
参照ETSI EN 302 637标准,当CAM消息的生成设备为车辆节点时,其标准的数据格式包括1个协议数据单元ITS PDU Header、1个基础容器Basic Container、多个高频容器HF Container、多个低频容器LF Container和附加容器,如图8所示。ITS PDU Header写入协议版本、消息类型和设备ID信息;Basic Container写入包含设备类型、设备所属区域等设备基础信息;HF Container写入动态变化的数据信息;LF Container写入静态数据信息;附加容器写入其他信息,如特定用途车辆的角色信息等。ETSI CAM消息结构如图8所示。
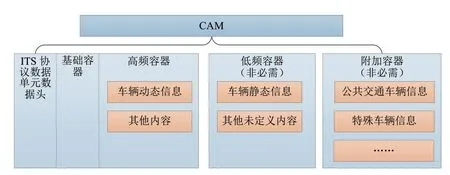
图8 ETSI CAM消息结构
同样的,对1个CAM消息而言,ITS PDU Header和其他所有容器是构成消息的基本数据帧,每个数据帧又根据不同需求写入不同数据元素。ITS PDU Header、Basic Container和HF Container为必需的数据帧,LF Container和附加容器根据不同内容选择性写入。
3.1.3 China-SAE标准数据帧结构
China-SAE遵循“消息集-数据帧-数据元素”层层嵌套的逻辑对应用层数据集进行定义。作为一种最基本的消息体,China-SAE中BSM对SAE中的BSM Part1数据帧进行了参考和补充。相比BSM Part1数据帧,China-SAE中BSM的主要变化在于:(1)对车辆ID信息的位数进行了扩展,使其能适应车辆的电子标签位数。(2)将描述区域信息的数据元素lat和long合并为3D位置信息数据元素pos,将描述区域信息准确程度的数据元素elev和accuracy合并为单一数据元素accuracy。(3)变更描述转向角度的数据元素angle为非必需数据元素。(4)增加了描述车辆类型的数据元素VehicleClass、描述车辆运动置信集的非必需数据元素motionCfd和扩展数据元素safeExt。China-SAE BSM消息结构如图9所示。
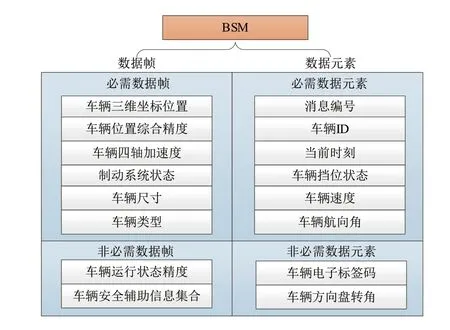
图9 China-SAE BSM消息结构
3.2 基本安全消息发送机制
基本安全消息机制的研究主要围绕BSM的发送频率和发送功率两方面进行。目前,不同的标准体系针对这两个参数给出了推荐的参数范围。
3.2.1 BSM消息发送频率
BSM消息的发送频率是影响信道负载和应用性能的关键因素。BSM消息的设计逻辑依据的是WAVE短消息协议[18](WAVE Short Message Protocol,WSMP),根据IEEE 1609.3标准的定义,利用WSMP封包进行信息交换时,不使用相对更具稳固性的传输机制,如传输控制协议(Transmission Control Protocol,TCP),而是由上层应用自行决定其传输机制,这使BSM消息的发送频率机制呈现灵活化和多样化。对与安全相关的应用而言,SAE J2935标准中推荐以10 Hz作为BSM中VehicleSafetyExtension数据帧的传输频率,同时,从数据的时效性出发,规定BSM Part1数据帧具有更高的发送频率。
根据ETSI标准,协同感知基础服务提供者(CA Basic Service设备)根据ITS基站(ITS Station,ITS-S)不同的角色管理具体BSM的发送频率。当发送基站为车辆节点(Vehicle ITS-Ss)时,其BSM的最小生成间隔T_GenCamMin应大于100 ms,最大生成间隔T_GenCamMax应小于1 000 ms,即BSM的发送频率应在1~10 Hz之间。对发送基站为路侧设备(RSU ITS-Ss)时,其BSM的生成间隔T_GenCamMin应保证通信设备至少能接受到1个发送的BSM即可,此值一般大于等于1 000 ms。在上述BSM发送频率范围内,CA基础服务提供者根据ITS-S请求并对信道拥堵状态进行评估后即可触发BSM的生成。如果ITS-S基站长时间不发出请求,其BSM生成间隔将维持在一个固定的频率T_CheckCamGen,该值小于等于T_GenCamMin,以此进行系统的低功率运行。
目前,中国相关车联网标准化组织尚未指定BSM消息的底层通信技术。考虑到BSM定义的功能,即用来在车辆之间交换安全状态数据,本文引用2018年China-SAE发布的团体标准T/CASE 100《车联网数据采集要求》,对其中数据采集频率的内容进行介绍。T/CASE 100确定了车载设备进行数据采集时的采集周期、编码规则的一般原则,并将设计的数据采集分为周期性采集和事件触发性采集,其中,周期性采集又分为采集周期最大不大于1 s的高频采集和采集周期最小不小于15 s的低频采集。事件性触发采集未对事件类型进行明确。
3.2.2 BSM消息EIRP值
根据3.2节,SAE和ETSI组织发布的标准中均要求利用控制信道传递BSM消息,即主要传递ITS应用的服务声明信息,同时,还可以看到,控制信道的EIRP值均大于或等于其他信道的EIRP值,SAE标准中为44.8 dBm,ETSI标准中为33 dBm,这一要求是保证控制信道上传递的安全声明消息能够在保证数据准确度的前提下,具备传递更远距离的能力。在中国,根据《车联网(智能网联汽车)直连通信无线电设备技术要求》,在5 905~5 925 MHz工作频率范围内,车载或便携无线电设备的EIRP值为26 dBm,路边无线电设备为29 dBm。
3.2.3 BSM发送机制研究分析
设计合理的BSM消息的结构及发送机制需要解决几个问题:首先,BSM消息发送机制的标准化工作应该基于标准的安全应用,但安全应用的标准化暂未完成,同时,安全应用的性能等级对应消息发送参数的转化方案还没有进展;其次,最优的消息发送机制势必与通信信道的物理特性相关,现有通信技术中信道类型和特征种类过于繁多。
针对BSM传播机制问题,目前,相关科研机构主要从应用层层面对BSM消息机制进行研究。SEPULCRE等[19]设计了一种依据不同应用需求和实时信道负载动态调整BSM通信参数的自适应方案。RAWASHDEH等[20]通过在周期性传播的消息包中共享其最大容忍时长和信道负载信息,设计了一种可调节发送频率和发送功率的BSM广播机制,以此提高网络性能。章未哲[21]通过设计基于BSM的分布式密度估计算法和分布式功率控制算法,提出了一个基于局部车辆密度的功率自适应调整方案。ROBINSON[22]设计了一种车辆同时多种应用并行运行场景下的BSM广播方案,借助一个消息调度器帮助车辆避免在同时运行多种应用时重复发送不必要的BSM。当不同应用需要传输相同的数据元素,却要使用不同的发送频率时,消息调度器以满足所有应用需求的最低频次生成消息包。
上述BSM机制研究成果中,文献[19]~[21]中改进方案的应用场景均较为简单,对于复杂的车联网及智能网联汽车应用场景而言适用性较差。文献[22]中未考虑到不同车联网及智能网联汽车应用对通信范围、发送功率的不同需求。此外,多数BSM机制研究未涉及V2I和V2P通信技术。因此,在未来的研究中,有必要针对包含有安全、效率和服务等多种类型应用的BSM机制进行分析和改进,并通过对不同交通状态参数(如车流密度、车速)条件下的BSM机制的性能进行研究,使其能够适用于复杂多变的实际交通系统。
4 结论
移动通信技术的逐步演进和发展是构建快速、高效车辆网联环境的基石。在早期,以IEEE 802.11p为底层通信技术构建的WAVE和ITS-G5通信架构,帮助人们实现了多种简单车联网应用,包括ETC、辅助驾驶和路况实时跟踪等。随着蜂窝移动通信技术的发展,借助C-V2X技术,以车联网、车路协同、智能汽车为代表的前沿技术不断涌现,为进行全息交通信息感知、高精度及高实时性的交通管控提供了可能。对车联网安全应用而言,移动通信技术的发展有效保证了应用的时效性。目前,多个国家和地区制定了车联网环境中数据交互主体间的数据格式。同时,BSM消息的传播机制亦经历了从基于拓扑信息、地理信息,到基于交通感知技术的演进过程。考虑到BSM消息是安全应用中使用范围最广的消息类型,本文对BSM机制展开了研究,对现行BSM机制进行了系统性的分析和总结。在介绍了不同标准体系下车联网架构的基础上,从物理层、无线接入层和应用层等多个层面,对BSM机制进行了全方位的讨论。对BSM消息机制而言,合理的消息机制不仅能提高车联网安全应用的准确度,更能使系统维持较低的网络损耗,因此,开展关于BSM消息机制中平衡应用需求和网络性能的研究将是未来的主要研究方向。同时,考虑到车联网应用复杂、多样的使用场景,研究针对多个场景、多个应用并行运行时的BSM机制也将是必然的趋势。此外,对车联网环境中的通信主体而言,传播BSM消息需要考虑身份认证、完整性、机密性、可用性和接入可控等多个方面的因素,以保证用户的数据安全。