轮毂电机驱动电动汽车3种构型的平顺性分析
2021-06-16成林海周淑辉郑玲玲王文竹
成林海,周淑辉,郑玲玲,王文竹,2,赵 旗,李 杰
(1.吉林大学 汽车仿真与控制国家重点实验室,长春 130025;2.沈阳航空航天大学 机电工程学院,沈阳 110136)
轮毂电机驱动电动汽车具有节能高效、环境友好和结构紧凑等优点[1],对单个车轮可以实现独立控制[2],逐渐成为电动汽车的研究热点之一。
为了在车轮内集成轮毂电机,在不改变悬架的情况下,提出轮毂电机驱动电动汽车3种构型[3]。构型1直接将轮毂电机装入车轮内,轮毂电机与车轮之间刚性连接[4];构型2在构型1的基础上引入吸振结构[5],吸收非簧载质量的振动;构型3在轮毂电机和车轮之间引入悬置结构[3],使轮毂电机变成簧载质量。
然而,将轮毂电机集成于车轮内,可能会导致非簧载质量增加,影响电动汽车的平顺性[6],而平顺性又直接影响乘员的舒适性和汽车的安全性[7]。
针对轮毂电机驱动电动汽车3种构型的平顺性,国内外学者在降低非簧载质量[8]和抑制非簧载质量垂向振动[9]等方面开展了相应的研究工作。文献[3]将3种构型与集中式驱动电动汽车的轮胎接地力的频域波动变化进行了比较。文献[10]将构型3的悬置结构变成主动悬置结构,通过加权系数的最优控制使主动悬置结构达到构型3的效果。文献[11]将构型3的悬置结构参数非线性化,通过线性和非线性的模糊滑模控制确定悬置结构参数,并将模糊滑模控制的构型与构型3和构型1进行了对比。
以上研究既说明轮毂电机驱动电动汽车3种构型的重要性,也说明已有研究没有根据平顺性评价指标对3种构型进行分析。此外,车辆行驶时遇到的脉冲路面激励会对轮毂电机驱动电动汽车平顺性产生影响,已有研究没有考虑这种影响,具有局限性。
针对上述问题,在前人研究的基础上,通过描述随机路面激励和脉冲路面激励,建立轮毂电机驱动电动汽车3种构型的振动模型,确定对应两种路面激励的平顺性指标,分析轮毂电机驱动电动汽车3种构型随机路面和脉冲路面的平顺性,为轮毂电机驱动电动汽车平顺性的进一步提高、优化和控制提供研究基础。
1 两种路面激励描述
1.1 随机路面激励描述
采用滤波白噪声法描述路面激励,滤波白噪声法将理想单位白噪声作为输入,随机路面激励作为输出,两者的关系如式(1)所示[12]:

式中:q为路面激励,m;w(t)为零均值和单位功率密度的理想单位白噪声;u为车速,m/s;nq=0.000 1为下截止空间频率;n0=0.1为参考空间频率;Gq(n0)为路面不平度系数,由标准的路面等级确定[13]。
国内路面等级现多为B级路面[13],在车速20 m/s和仿真时间5 s的条件下,B级随机路面激励的时域仿真结果,如图1所示。
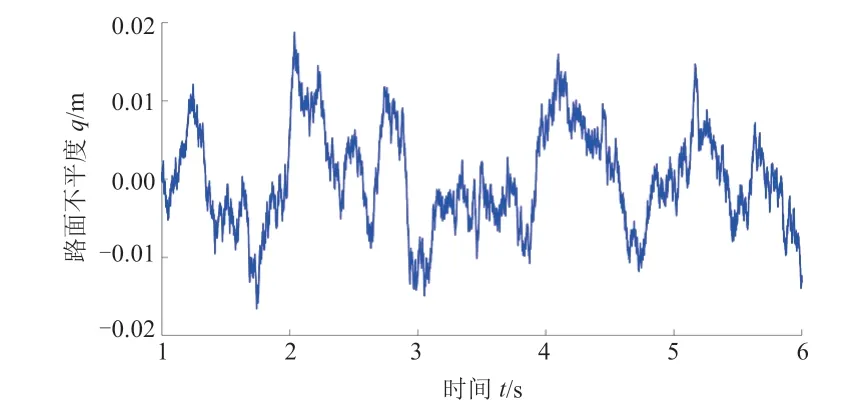
图1 B级随机路面时域仿真
为了说明获得的随机路面激励的正确性,采用Welch算法对随机路面激励求取功率谱密度,并与标准功率谱密度曲线对比。将Matlab工具箱的Pwelch函数设定为单边功率谱密度[14],实现Welch算法的随机路面激励的功率谱密度估计,如图2所示。由图2可知,建立的随机路面激励功率谱密度位于国标范围内,说明随机路面激励生成的正确性。
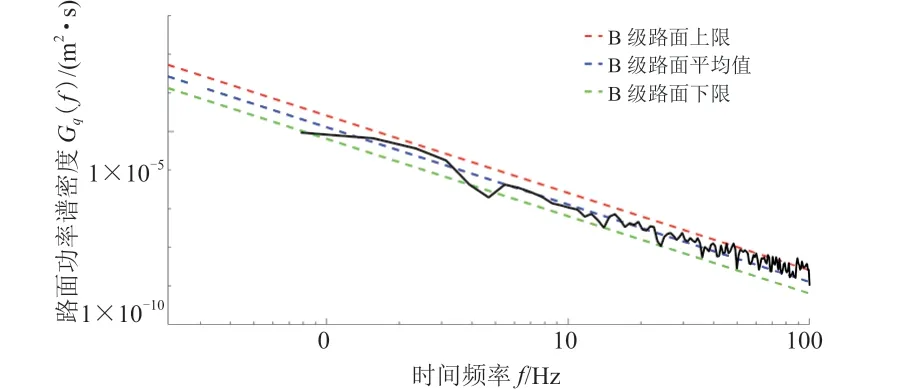
图2 B级随机路面功率谱密度
1.2 脉冲路面激励描述
根据GB/T4970—2009《汽车平顺性试验方法》规定[15],采用三角形凸块描述脉冲路面激励如下:
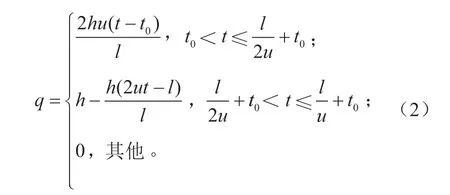
式中:t0为车辆以速度u行驶到凸块的时间,s;h为凸块路面高度,m;l为凸块的长度,m。
GB/T4970—2009规定的三角凸块如图3所示。其中,h=0.04 m,l=0.4 m。
2 三种构型的振动模型
2.1 三种构型的振动模型
构型1由簧载质量(车身)和非簧载质量(车轮)构成,如图4a所示。其中,mb为簧载质量、mw为非簧载质量、md为轮毂电机质量、ks为悬架弹簧刚度,cs为悬架阻尼,kt为轮胎刚度,q为路面激励,z2为车身位移,z1为车轮位移。
根据牛顿第二定律,构型1的振动模型可以描述为:
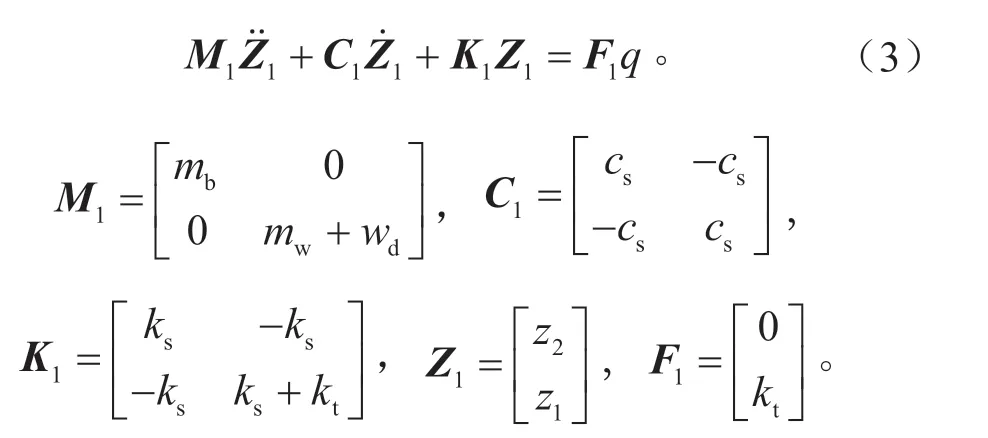
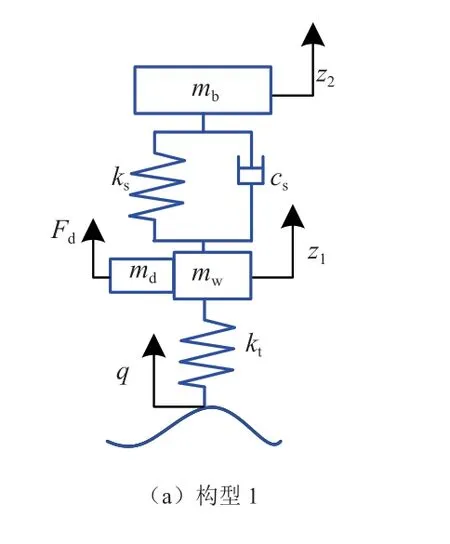
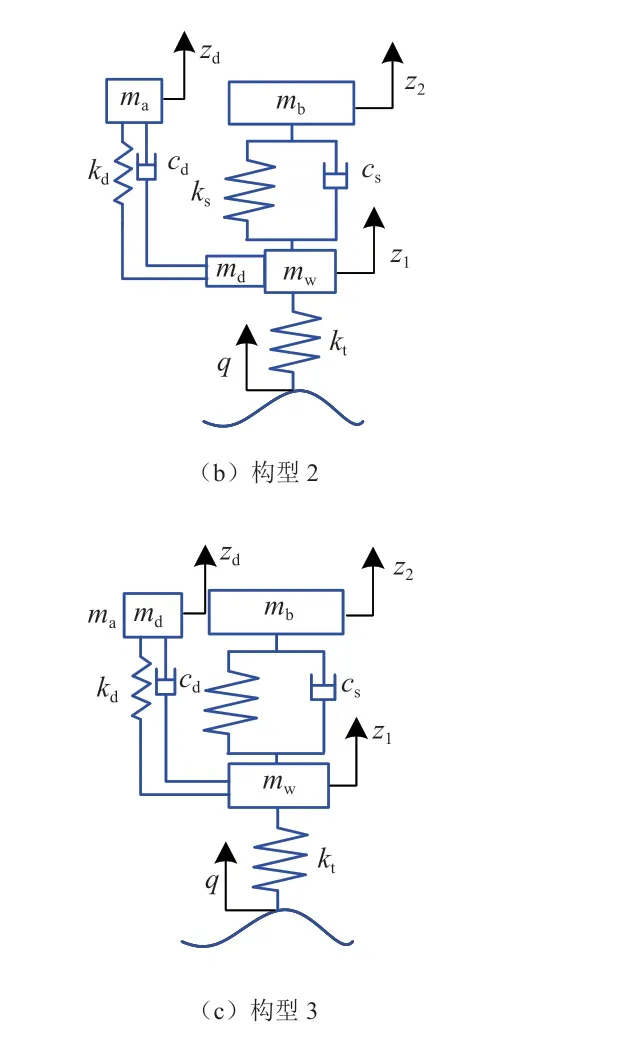
图4 三种构型的振动模型
构型2在构型1的基础上引入吸振结构,如图4b所示。其中,kd为吸振结构刚度,cd为吸振结构阻尼,ma为吸振质量,za为吸振质量位移。
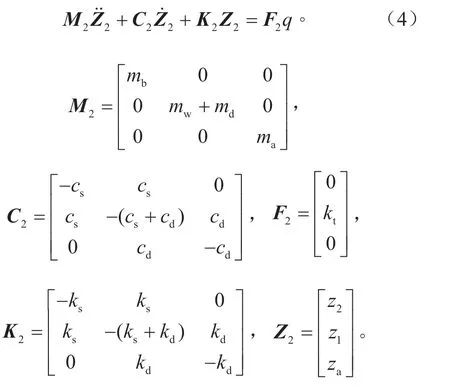
根据牛顿第二定律,构型2的振动模型可以描述为:
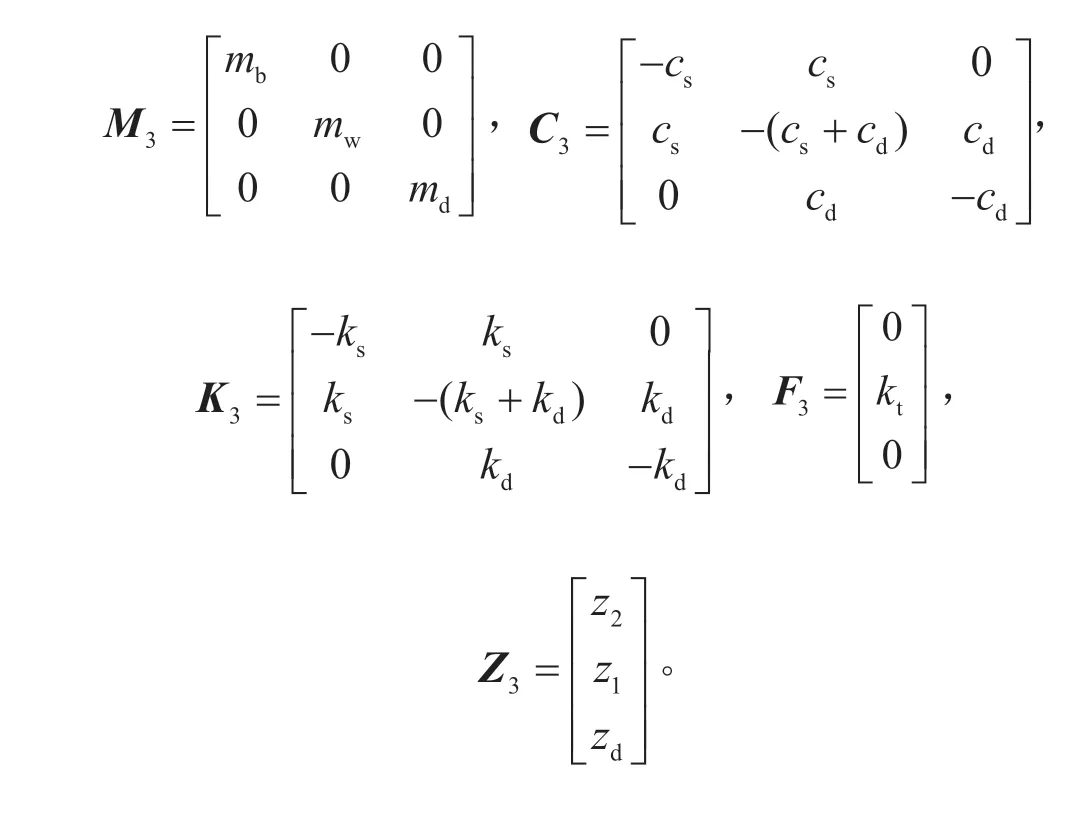
构型3在轮毂电机与车轮之间引入悬置结构,如图4c所示。其中,kd为悬置结构的弹簧刚度,cd为悬置结构的阻尼,zd为轮毂电机位移。
根据牛顿第二定律,构型3的振动模型可以描述为:

2.2 平顺性评价指标
对于轮毂电机驱动电动汽车的3种构型,平顺性分析的常规振动响应量由簧载质量加速度..z2,悬架动挠度fd和车轮相对动载Fd组成。考虑到轮毂电机的引入,本文补充轮毂电机加速度..z1或..zd作为振动响应量。
对于3种构型,fd和Fd表示为:
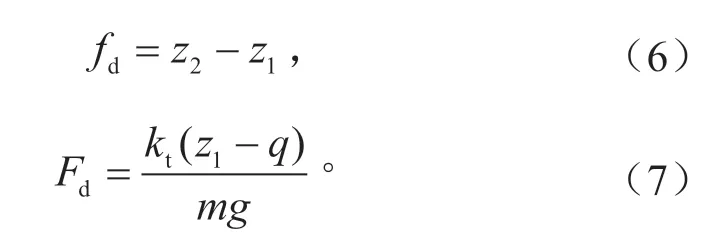
式中:m为振动模型的总质量。
针对式(3)~(5),采用时域积分方法。例如,对Matlab中Runge-Kutta算法的ode45函数进行求解,可以得到各个时刻位移Zi、速度和加速度。再由式(6)和式(7)求得悬架动挠度fd和车轮相对动载Fd。
随机路面的平顺性评价指标由各个振动响应量的均方根表示,即
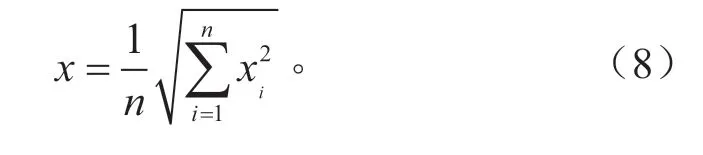
式中:x为振动响应量的均方根值;xi为振动响应量各个时刻的值。
脉冲路面的平顺性评价指标由各个振动响应量的绝对值最大值表示,即

3 平顺性分析
3.1 分析方案
为了分析3种构型的平顺性,根据前面的理论分析,采用Matlab/Simulink开发程序分别对3种构型B级随机路面和脉冲路面的平顺性进行仿真。仿真所需的参数取自文献[3],见表1。
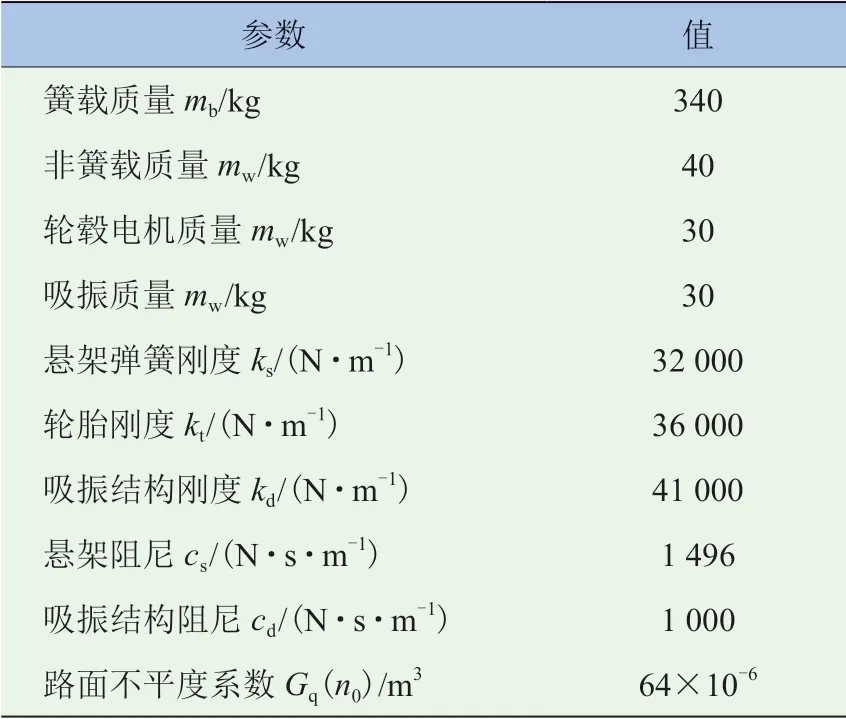
表1 仿真所需参数
3.2 随机路面平顺性分析
针对B级路面,车速以1 km/h的增量由5 km/h变化到80 km/h,仿真时间5 s,各个平顺性评价指标如图5所示。
由图5可知:
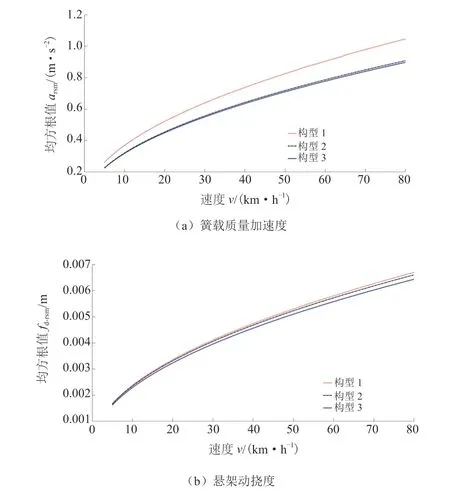

图5 随机路面平顺性指标对比
(1)对于簧载质量加速度均方根值,构型2和构型3小于构型1,构型2相对于构型1的簧载质量加速度均方根值的均值减小0.095 m/s2,构型3相对于构型1的簧载质量加速度均方根值的均值减小0.102 m/s2。
(2)对于悬架动挠度均方根值,构型2和构型3小于构型1,但是减小幅度不大,构型2相对于构型1的悬架动挠度均方根值的均值减小0.061 mm,构型3相对于构型1的悬架动挠度均方根值的均值减小0.179 mm。
(3)对于车轮相对动载均方根值,构型2和构型3小于构型1,构型2相对于构型1车轮相对动载均方根值的均值减小0.033 2,构型3相对于构型1车轮相对动载均方根值的均值减小0.047 0。
(4)对于电机加速度均方根值,构型2和构型3小于构型1,构型2相对于构型1轮毂电机加速度均方根值的均值减小2.35 m/s2,构型3相对于构型1轮毂电机加速度均方根值的均值减小5.06 m/s2。
由以上分析可知,相对于构型1,构型2和构型3降低了轮毂电机驱动电动汽车随机路面平顺性的所有评价指标,构型3好于构型2,构型2好于构型1。
3.3 脉冲路面平顺性分析
针对脉冲路面,车速以1 km/h的增量由10 km/h变化到60 km/h,仿真时间5 s,各个平顺性评价指标,如图6所示。
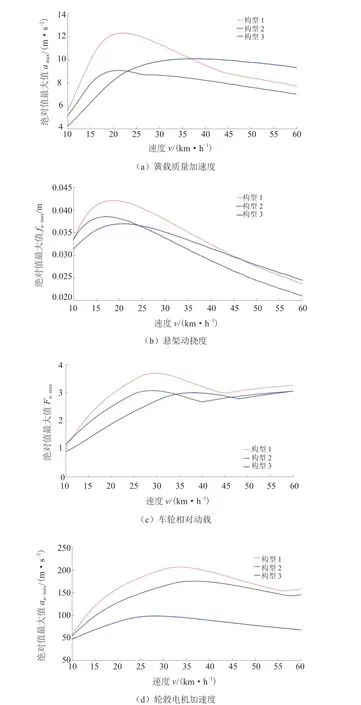
图6 脉冲路面平顺性指标对比
由图6可知:
(1)对于簧载质量加速度绝对值最大值,构型2小于构型1,构型2相对于构型1簧载质量加速度绝对值最大值的均值减小1.74 m/s2。速度小于37 km/h时,构型3小于构型1;速度大于37 km/h时,构型3大于构型1。构型3相对于构型1簧载质量加速度绝对值最大值的均值减小0.77 m/s2。
(2)对于悬架动挠度绝对值最大值,构型2小于构型1,构型2相对于构型1悬架动挠度绝对值最大值的均值减小3.281 mm。速度小于47 km/h时,构型3小于构型1;速度大于47 km/h时,构型3稍大于构型1。构型3相对于构型1悬架动挠度绝对值最大值的均值减小2.011 mm。
(3)对于车轮相对动载绝对值最大值,构型2和构型3小于构型1,构型2相对于构型1车轮相对动载绝对值最大值的均值减小0.353 5,构型3相对于构型1车轮相对动载绝对值最大值的均值减小0.554 0。
(4)对于电机加速度绝对值最大值,构型2和构型3小于构型1,构型2相对于构型1电机加速度绝对值最大值的均值减小22.09 m/s2,构型3相对于构型1电机加速度绝对值最大值的均值减小85.59 m/s2。
由以上分析可知,相对于构型1,构型2和构型3总体上降低了轮毂电机驱动电动汽车脉冲路面平顺性的所有指标,对于簧载质量加速度和悬架动挠度的影响不同,构型2好于构型3,构型3好于构型1;对于车轮相对动载和轮毂电机加速度,构型3好于构型2,构型2好于构型1。
4 结论
针对轮毂电机驱动电动汽车3种构型的平顺性,给出随机路面激励和脉冲路面激励模型,分别建立了适用于两种路面激励的3种构型的振动模型,确定了随机路面和脉冲路面的平顺性评价指标,针对两种路面激励通过仿真对比了3种构型的平顺性评价指标。
研究结果表明,针对随机路面平顺性,构型2和构型3都优于构型1,且构型3更好;针对脉冲路面平顺性,构型2和构型3都优于构型1,对于簧载质量加速度和悬架动挠度指标,构型2和构型3优于构型1,且构型2更好,对于轮毂电机加速度和车轮相对动载指标,构型2好于构型3,且构型3更好。