达芬奇机器人手术系统在子宫内膜癌分期手术中的应用价值
2021-05-25宫迎迎张红燕张素伟王云飞杨林青
宫迎迎,张红燕,张素伟,周 烨,王云飞,杨林青
(济宁医学院附属医院妇科,济宁 272100)
子宫内膜癌是女性生殖系统最常见的三大恶性肿瘤之一,约占女性生殖系统恶性肿瘤的20% ~30%,治疗原则以手术为主,放疗、化疗为辅[1]。手术可经腹或腹腔镜进行,在不影响治疗效果的前提下,首选腹腔镜手术。传统的腹腔镜手术提供的是二维平面图像,术者缺乏深度和立体的感知,而机器人腹腔镜可提供三维高清放大的视野、灵活的机械手臂和具有滤颤功能系统,是对传统腹腔镜的进一步发展和有益补充。美国食品药品监督管理局(FDA)自2005年批准达芬奇机器人手术系统(DVSS)应用于妇科手术,DVSS作为子宫内膜癌新型微创手术方式引起了广泛的关注[2]。本研究通过回顾分析89例子宫内膜癌全面分期手术患者的临床资料,旨在探讨达芬奇机器人手术系统在子宫内膜癌手术中的安全性、可行性和临床疗效。
1 资料与方法
1.1 临床资料 回顾分析2018年11月至2020年11月在济宁医学院附属医院实施子宫内膜癌微创手术的89例患者的临床病例资料。患者均于术前通过病理诊断为子宫内膜癌,对于宫颈活检、盆腔核磁怀疑或肉眼宫颈受累(FIGO II期)患者行广泛全子宫+双附件切除+手术分期,其他期别行筋膜外子宫+双附件切除术+手术分期[3],并根据患者意愿选择手术。其中传统腹腔镜组50例,机器人腹腔镜组39例。排除标准:(1)合并严重心、肺疾病,严重肝、肾功能不全等;(2)存在转移性肿瘤及其他恶性肿瘤;(3)术前放、化疗史。两组患者的一般资料比较,见表1。
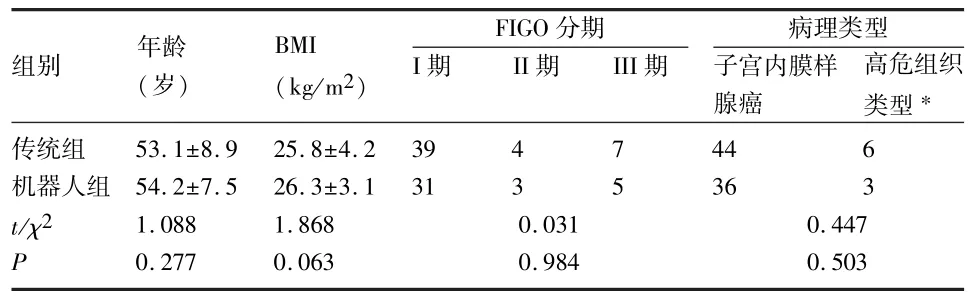
表1 两组患者的一般资料比较
1.2 方法
1.2.1 术前准备 完善术前相关检查,排除手术禁忌,与患者及家属交待病情并告知手术风险,签署知情同意书。患者术前3天开始无油渣饮食,术前一天给予复发聚乙二醇电解质散导泻,必要时肥皂水清洁灌肠,予枸橼酸钾补充电解质,术前8h禁食,术前4h禁水。
1.2.2 手术方法 传统腹腔镜组采用德国STORZ高清腹腔镜系统,使用常规腹腔镜器械,超声刀、百克钳、单极等。机器人腹腔镜组采用第四代达芬奇机器人手术系统及其配套设备。两组手术均由同一术者完成。手术步骤基本相同。具体操作方法见文献[4-5]。
1.2.3 观察指标 (1)术中情况,如手术时间、术中出血量、术中损伤。(2)术后引流管留置时间、术后留置尿管时间、术后肛门排气时间、术后近期并发症(输尿管损伤、血管损伤、闭孔神经损伤、血栓形成、淋巴囊肿、乳糜漏)、住院天数。(3)术后病理切除盆腔淋巴结、腹主动脉旁淋巴结数。
1.3 统计学处理 采用SPSS21.0统计软件,定量资料采用±s表示,采用t检验。定性资料用率(%)描述,采用卡方检验。P<0.05为差异有统计学意义。
2 结 果
89例患者手术均顺利完成,无中转开腹。机器人组中有36例患者行腹主动脉旁淋巴结切除术,传统腹腔镜组有41例患者行腹主动脉旁淋巴结切除术。机器人组患者的术中出血量、手术并发症少于传统腹腔镜组,淋巴结切除数多于传统腹腔镜组,但引流管留置时间长于传统腹腔镜组,差异均有统计学意义(P<0.05)。两组患者的手术时间、尿管留置时间、排气时间及住院天数比较,差异均无统计学意义(P>0.05)。 见表 2、3。
表2 两组患者的观察指标比较(±s)

表2 两组患者的观察指标比较(±s)
PLN:盆腔淋巴结;PALN:腹主动脉旁淋巴结
组别 手术时间(min)出血量(mL)PLN(n)PALN(n)引流(d)尿管(d)排气(d)住院天数(d)传统组 207.0±46.9 63.2±33.1 21.4±7.9 9.6±5.1 6.3±1.1 4.2±2.3 1.7±0.6 8.1±1.9机器人组 218.0±38.2 46.2±39.7 24.9±8.3 13.5±5.9 7.6±2.4 3.9±1.8 1.5±0.7 8.7±2.1 t 1.706 2.125 2.603 2.977 2.237 0.054 0.163 0.160 P 0.088 0.039 0.011 0.004 0022 0.975 0.686 0.873

表3 两组患者手术并发症的比较[n(%)]
3 讨 论
目前子宫内膜癌的治疗原则仍以手术为主,腹腔镜手术因其手术时间短、出血少、创伤小和恢复快的优势,已成为子宫内膜癌首选手术方式[6]。传统的腹腔镜系统提供的是二维平面图像,缺乏立体视野下的深度感知,具有一定解剖层次的缺失。此外,镜头的不稳定性,移动范围受限,使手术操作减慢,增加了出血量,延长了手术时间,也可能伤及组织器官[7]。
本研究中机器人腹腔镜较传统腹腔镜具有术中出血量少、术中切除淋巴结数多、手术并发症少的优点,与国内外其他研究结果基本一致[8-12]。分析主要原因:(1)达芬奇机器人外科系统自带三维立体视野成像系统,可提供高清的手术视野及深度感知,解剖层次的立体感使术野更加清晰、真实,便于术者更容易分辨和分离细小的血管、神经和淋巴结组织,在更彻底切除淋巴结的同时,减少了血管的损伤,保护了周围神经,从而减少了出血量及手术并发症的发生。(2)达芬奇机器人外科系统机械臂具有7个自由度,提高了手术器械的灵活性,扩大了可操作范围,使狭小的空间内完成复杂的操作成为可能,尤其体现在腹主动脉旁淋巴结切除过程中。(3)镜头具有可伸缩性、旋转性和自动对焦功能,减少擦拭镜头时间,解决了助手举镜子不稳定性的缺点。(4)通过机械臂上稳定器等震颤过滤系统可减少误操作,提高手术精准度。此外,DVSS具有荧光显影功能,在宫颈注射吲哚菁绿等显影剂后可对淋巴结示踪,更彻底地切除淋巴结。有研究表明,机器人腹腔镜手术时间少于传统腹腔镜。但本研究中两组手术时间无统计学差异,可能是由于机器人手术有一定的学习曲线,待术者熟练掌握操作后该优势可得以显现。
对术者而言,机器人腹腔镜手术术者可不需刷手上台,于独立的空间操作,在更放松、舒适的坐姿下完成手术,尤其是子宫内膜癌这类费时费力的复杂妇科手术,减少疲劳,使术者精神更集中。对助手而言,机器人腹腔镜手术不需固定助手扶镜,减少助手人数,提高医务人员的工作效率。此外,有学者研究表明[13-14],机器人腹腔镜系统自带立体成像系统,和开腹手术所见场景类似,医生学习曲线较腹腔镜短,更容易上手。
机器人腹腔镜外科手术系统在带来优势的同时也存在一些不足。本研究中机器人组患者盆腔引流液较传统组多,引流管留置时间较长,这可能是由于机器人腹腔镜系统中切除淋巴结更加彻底,能量器械,如超声刀或单极停留时间短,淋巴管闭合欠佳有关。亦有学者研究表明,因机器人外科手术系统牵拉臂缺乏触觉感知,可能出现牵拉损伤、止血不彻底、缝合欠紧等风险[14],但均发生于系统学习的早期阶段。笔者认为,这些不足在术中长期手术经验积累中可得以解决。此外,高昂的费用、准备工作的繁杂也是患者及术者望而却步的原因。
综上所述,机器人腹腔镜较传统腹腔镜,具有出血少、并发症少,淋巴结切除数多等优点,这表明机器人腹腔镜系统应用于子宫内膜癌分期手术安全有效。但本研究样本量少,且缺乏对患者预后的随访,仍需扩大样本量,完善随访资料进一步评估。笔者认为,机器人腹腔镜外科系统其三维立体成像系统、灵活的机械臂、镜头可旋转性及其震颤过滤系统是对传统腹腔镜的有益补充,值得推广应用。