基于双侧窄角域摄影的沥青路表三维重构及构造特征分析
2021-04-20周若愚蒯陈辰盛稚严
陈 俊 周若愚 蒯陈辰 盛稚严 陈 乾
(1河海大学土木与交通学院, 南京 210098)(2东南大学交通学院, 南京 211189)
无人驾驶是智能交通的发展趋势,也是未来交通运输的必然需求[1].无人驾驶时车辆制动、加速、变道等策略,除了受交通状况、车辆因素影响之外,还取决于道路表面状态,尤其是路表构造深度和纹理[2-4].自动、实时、完整地获取路表构造和纹理信息,并及时制定合理的驾驶策略是无人驾驶车辆安全行驶的基本要求.
目前,测试道路表面构造的方法包括2种:接触式和非接触式.其中,接触式测量主要采用铺砂法、摆式仪、旋转式或连续式摩擦系数测试仪等,对路表构造或摩擦系数进行定点测量,这类方法不仅受人为因素影响大,且获取的路表构造信息有限,测试效率较低[5-6],无法满足无人驾驶车辆对路表构造快速、实时获取的要求.非接触式测量主要包括激光测量法、工业CT扫描法、近景摄影测量法等.其中,激光测量法仅适用于干燥沥青路面,且激光测试设备十分昂贵[7];CT扫描技术只能在室内对试件进行扫描,需提前对沥青路面钻孔取芯[8-9],无法满足无人驾驶车辆对路表构造特征的实时获取要求.
近景摄影测量是对物距不大于300 m的目标物进行多角度的环绕拍照,由各图像间数字特征匹配和点云数据重构路表构造,并提取构造特征信息[10],具有测试时间短、效率高等优点[11-14].陈嘉颖等[15]根据近景摄影测量原理采用环形分布的3个相机,结合图像算法,快速重构了沥青混合料表面三维构造.但是,无人驾驶车辆仅能在窄角度范围内获取前方或者后方路表的图像,难以做到对路表的多角度环绕拍摄,导致环绕近景摄影无法直接应用于无人驾驶车辆.而基于前后两车窄角域摄影(前车向后拍摄+后车向前拍摄)的路表构造重建,能够获得前后两车之间路段上的路表构造,从而为后车制定无人驾驶策略提供实时路表参数.因此,建立基于双侧窄角域摄影的路面构造重构方法,并对路表构造信息进行全面评价,对于无人驾驶技术发展意义重大.
本文采用双侧窄角域摄影技术,结合多图片数字特征匹配方法,建立沥青路表三维构造重构方法;通过与铺砂法获得的构造深度、经典环绕摄影获得的三维点云比较,验证本文方法的正确性;将该方法应用于3种类型沥青混合料表面构造的重构中,建立平均构造深度、构造标准差、单位面积上峰数、峰高标准差等新指标来全面评价路表构造信息.
1 沥青混合料表面构造三维重构方法
本文沥青混合料表面三维构造的重构主要包括3个步骤:图像采集及处理、三维点云构建、表面模型重建.
1.1 图像采集及处理
根据图1所示的无人驾驶车辆摄影原理,本文在沥青混合料左右两侧均进行窄角域拍摄,拍摄范围为混合料上表面标尺内部的方形区域(长210 mm、宽120 mm),两侧机位与拍摄区域中心的水平距离为30 cm,相机光轴与水平方向夹角在45°~60°内,如图2所示.对所有图像进行畸变校正、切割、对比度增强、阴影去除、降噪等处理[16].图像处理后,沥青混合料表面特征点在每一张相片上均留下印记.

图1 前后两侧窄角域摄影的路表重构及其与驾驶策略关系
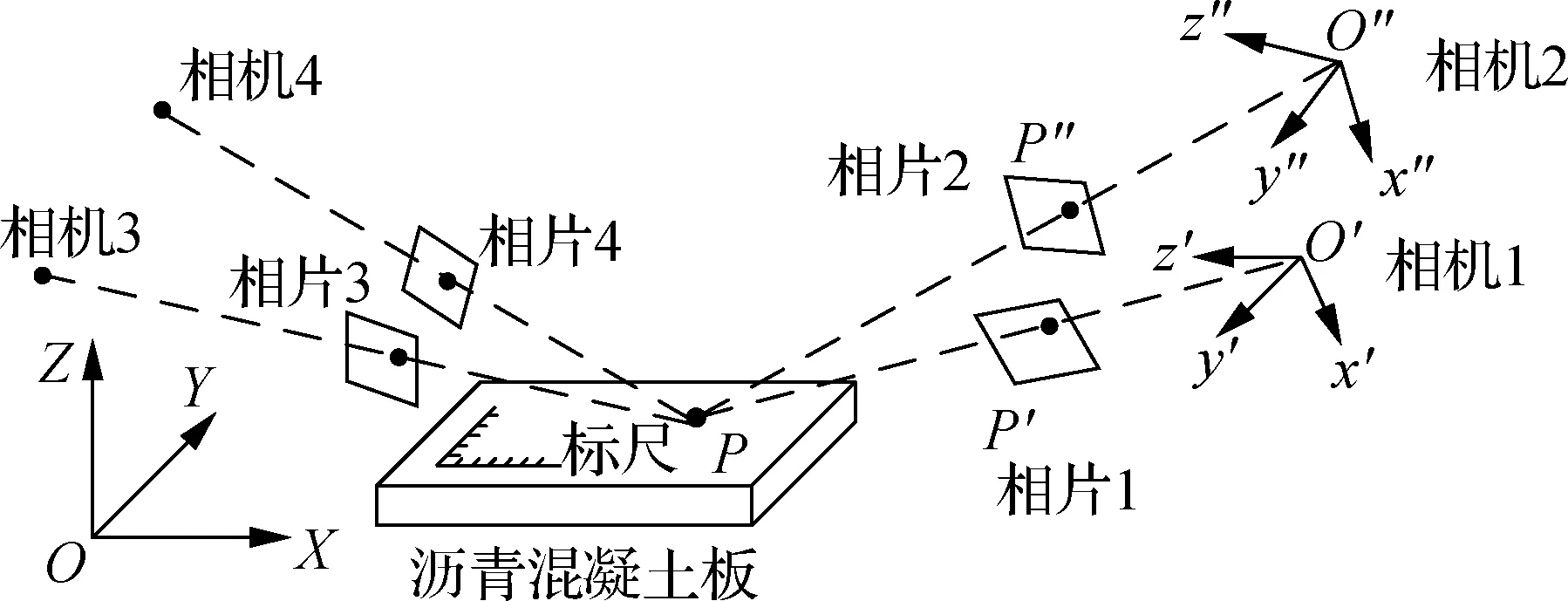
图2 对沥青混合料左右两侧的窄角域摄影
1.2 三维点云构建
构建点云的核心是由相片上特征点的二维坐标,反推出特征点在混合料表面的三维坐标.以图2为例,根据相片1和相片2上P′和P″在相片上的平面坐标,确定点P在混合料表面的三维坐标,具体步骤如下:
① 特征点匹配.参照文献[17],采用局部特征向量描述相片图像内各点的方向、尺度和位置特征,当一张图像中某点局部特征向量与其他图像某点特征向量的欧氏距离最小时,该两点为特征点对,完成匹配.图1中P′和P″即为沥青混合料表面P点在2张相片上匹配出的特征点对.
② 坐标系转换.被摄沥青混合料所在地面坐标系为OXYZ,机位1坐标系为o′x′y′z′,机位2坐标系为o″x″y″z″.在相机焦距为f时,确定P′在机位1坐标系内的坐标(x1,y1,f),并将其转化为P′在地面坐标系的坐标(X1,Y1,Z1),即
(1)

③ 特征点坐标求解.根据o′P′P、o″P″P三点共线,可得
(2)
(3)
联立式(2)和(3),求解点P在地面坐标系的坐标(X,Y,Z),获得所有特征点在沥青混合料表面三维空间的坐标,即三维点云数据.采用Python语言,对路表三维点云的上述构建方法进行编译,以满足无人驾驶车辆快速、实时地根据路表图像获取三维点云的要求.
1.3 三维模型重建
根据混合料表面各个特征点的三维坐标,由VisualSFM平台建立三维点云,并采用MeshLab软件删除杂点后完成表面实体建模.采用Geomagic Design X软件,对混合料表面矩形框尺(见图2)的角点进行坐标系调整,并按框尺长度进行校准或比例缩放.
2 表面三维构造重建方法的验证
2.1 室内验证
对沥青路表普遍使用的AC-13、SMA-13和OGFC-13混合料,按表1所示级配和沥青用量在室内成型车辙板.按照上文方法,获得了3种混合料车辙板表面长210 mm、宽120 mm范围内的点云,并重构了它们的表面三维构造,如图3所示.可见,3种混合料表面完成匹配的三维点云密度d(即单位面积上特征点数量)在170个/cm2以上,点云密集,由此重构的混合料表面构造也十分细腻,每cm2表面三角片数量ft在460个以上.这说明结合双侧窄角域摄影和特征点匹配,能够计算出混合料表面大量密集特征点的三维坐标,并重构出表面的三维构造.

表1 3种沥青混合料的级配和沥青用量

(a) 车辙板

(b) 表面点云

(c) 三维构造
在Matlab中对尺寸为210 mm×120 mm的模型,按线性插值法,生成大小为2 101×1 201的表面竖向坐标矩阵,矩阵每行/列相邻两点的水平距离为0.1 mm.按下式计算平均构造深度dMTD:
(4)
式中,Zp为计算区域内路表最高点的竖向坐标值;Z(xi,yj)为(xi,yj)处路表竖向坐标值;M,N分别为路表深度矩阵在x,y方向上点的个数.
分别采用铺砂法和环绕摄影法测试混合料板表面的构造深度,并与按式(4)计算的平均构造深度进行比较,结果如图4所示.此外,考虑到环绕摄影已被文献[15]证明是重构路表构造的正确方法,本文对3种沥青混合料板进行环绕摄影及三维建模,并计算平均构造深度,结果见图4.

图4 3种沥青混合料表面构造深度
由图4可看出,对于AC-13和SMA-13沥青混合料,采用本文双侧窄角域摄影建模后计算得到的构造深度,与经典环绕法摄影计算值、铺砂法实测值差异很小.对于OGFC-13这种多孔隙沥青混合料,计算值与实测值的差异仅为9.1%,造成这种差异的原因是:平均构造深度计算值是混合料表面各点和表面最高点高度差的平均值,而铺砂法测试时表面铺开的细砂可能没有完全达到表面最高点.3种沥青混合料构造深度计算值与实测值的较小差异,证明了双侧窄角域摄影重构混合料表面构造方法的正确性.
2.2 室外验证
选择表面构造差异显著的6个路段,对每个路段内12个测点(相邻测点间隔60 cm)分别进行双侧窄角域摄影和铺砂法试验,并以12个测点构造深度均值作为路段的构造深度,结果如图5所示.由图可见,6个路段因混合料级配、使用年限等差异,表面构造深度差异很大,范围为0.41~0.83 mm.但是,同一路段构造深度的实测值与计算值基本相同,两者拟合后线性相关度高达0.967 6,呈现良好的线性关系.这表明基于双侧窄角域摄影的沥青路表三维重构方法不仅适用于室内压实混合料,也适用于野外实际路面构造深度的测量.

图5 路表构造深度计算值与铺砂法实测值的关系
2.3 不同光照强度下建模方法适用性分析
在晴天12:00、14:00、16:00、18:00和20:00这5个时刻,分别采用光照计测量太阳光照强度,并根据上述双侧窄角域摄影建模方法,对路表同一区域(210 mm×120 mm)重构模型,计算三维点云密度d和平均构造深度,结果如表2所示.可看出,在光线充足的白天,双侧窄角域拍摄的图像能够完成三维建模,且12:00~18:00之间4个时刻匹配出的特征点数量差异较小,计算出的构造深度几乎没有差异,但在20:00光线不良时,图像间匹配成功的特征点十分有限,无法重构清晰的路表构造.因此,双侧窄角域拍摄应用于夜晚光线暗淡条件需借助外部光源.
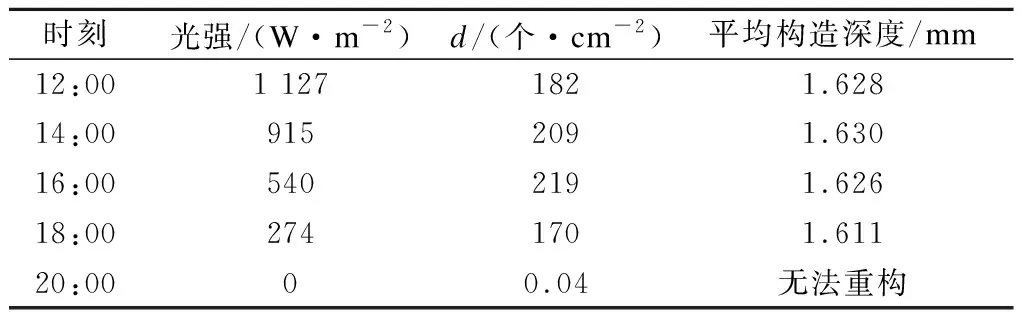
表2 不同时刻下路表同一区域的构造重构
在夜晚时分,采用3种模式(相机+手电照明、相机+闪光灯、夜景)对路表同一区域(210 mm×120 mm)进行图像采集,构建三维点云和模型,并与白天光线充足条件下实验结果进行比较,如表3所示.尽管夜晚条件下相机+手电照明、相机+闪光灯模式下三维点云密度d均少于白天光线充足时,但上述2种模式下获得的平均构造深度仅略小于白天摄影获得的平均构造深度.这说明借助合适的外部光源,本文的建模方法依然能够获得足够大的特征点密度,适用于野外光线不良条件.

表3 3种外部光源模式与白天建模效果的比较
3 路面建模方法应用于无人驾驶的可行性分析
除了通过室内外测试验证建模方法的正确性之外,本文从硬件要求、建模精度、应用于无人驾驶车辆的可行性等方面[12-15],对基于双侧窄角域摄影的建模方法、经典环绕摄影的建模方法和传统双目视觉的建模方法进行了比较,如表4所示.可看出,相比于传统双目摄影建模方法,本文建立的双侧窄角域摄影建模方法通过更多的摄像头实现了更高精度的建模,而与经典环绕摄影建模方法相比,本文方法通过车头摄像头向前拍摄+车尾摄像头向后拍摄,更易应用于无人驾驶汽车上.此外,路表建模和构造特征计算效率是评价各种方法应用于无人驾驶可行性的重要指标,由于表4所列3种方法所用相机数量较少,在当前计算机芯片数据处理能力不断提高的背景下,3种方法计算效率差异应不大.因此,从建模精度、应用难度、计算效率等角度评判,基于双侧窄角域摄影的建模方法应用于无人驾驶具有可行性.

表4 路表构造3种测试方法的比较
4 混合料表面三维构造特征分析
4.1 混合料表面构造深度分布特征
本文从混合料表面各点深度均值和深度离散程度2个方面,分析混合料构造分布特征.采用MATLAB提取沥青混合料表面(范围为21 cm×12 cm)各特征点坐标,绘制各特征点的竖向深度图,如图6所示,其中标尺的零点为混合料表面竖向最高处,x和y方向与图2一致.由图可直观看出,3种沥青混合料表面均凹凸不平,根据深度标尺可看出,AC-13表面凹凸程度最小,OGFC-13表面凹凸程度最大,这与密级配和开级配混合料表面特征相符.为了分析混合料表面深度分布,对图6中表面各特征点的深度数据进行统计,结果如图7所示.
由图7可见,AC-13表面90%以上构造主要集中在0~1.5 mm较窄范围内,构造深度标准差σ1仅为0.343 mm,构造深度较集中、单一.与AC-13不同,SMA-13、OGFC-13构造深度范围较广,尤其是OGFC-13,其表面各点构造深度在0.5~3.5 mm的较大范围内都有分布,既有浅构造,又有深构造,构造深度标准差达到0.596 mm.
4.2 单位面积上峰数及峰高标准差
在上述混合料表面模型上,混合料表面的波峰是凸出的集料颗粒,单位面积上峰的数量越多,说明与路表轮胎接触的集料越多,路/胎有效接触面积越大,在外荷载不变时,这些集料受力越小,被磨速率越小.此外,凸出集料被磨光速率还受颗粒高度差异的影响,凸出集料颗粒的高度越接近,集料颗粒受外力作用就越均匀,被磨速率就越慢.因此,在上述建立的混合料表面三维模型的基础上,统计分析水平单位面积上峰数及峰高离散程度具有实际意义.

(a) AC-13(dMTD=0.918 mm)

(a) AC-13(σ1=0.343 mm)
参考文献[19-20]胎/路接触应力分析中有关接触构造的定义,本文将高于平均构造深度的路表局部最高点认为是峰,如图8所示,采用Matlab内自编子程序,识别3种沥青混合料表面(范围为21 cm×12 cm)波峰,并计算单位面积上峰数N及峰高标准差σ2,结果如图9所示.3种沥青混合料中,单位面积上AC-13拥有最多的波峰和最小的峰高标准差,而OGFC-13单位面积上波峰数最少,峰高标准差最大.由此可以推测,AC-13与轮胎有效接触面积最大,且轮胎与AC-13接触应力较均匀,应力集中程度较低,而OGFC-13因较大的峰高标准差、较少的波峰,其与轮胎接触存在相对较高的应力集中.接触应力集中将导致OGFC-13表面磨耗或磨光较快,这与文献[19-20]的结论相符.可见,本文提出的混合料单位面积上峰数、峰高标准差,可以间接反映胎/路接触应力均匀性,为从减缓集料磨耗角度进行混合料级配优化提供了新思路.
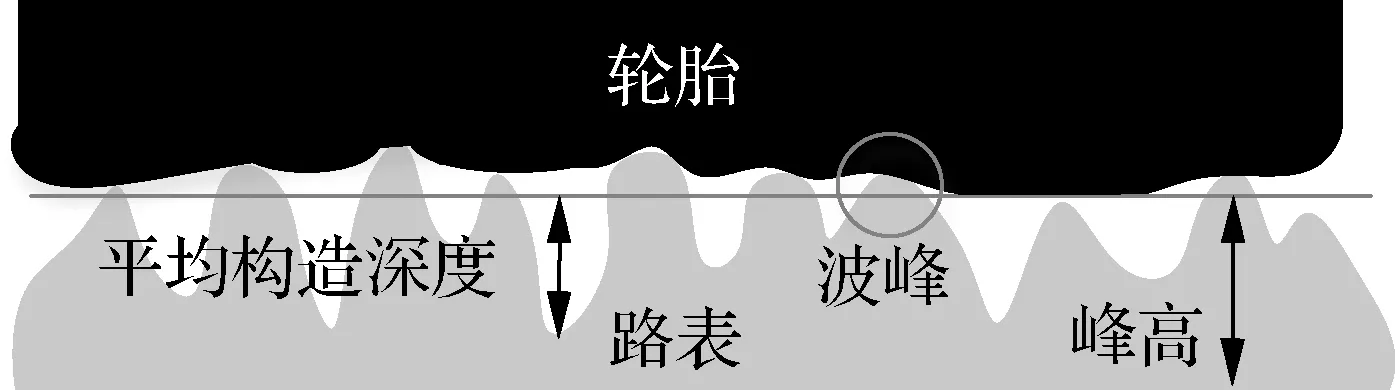
图8 胎/路接触处路表构造特征
4.3 混合料表面构造的方向差异性
无人驾驶时车辆的制动和变道策略,分别与路表纵向和横向构造密切相关,为了分析混合料表面构造在水平2个方向上的差异性,在重建的混合料表面模型中沿x方向和y方向分别截取断面,绘制断面上的构造轮廓曲线(见图10),并分别计算2个方向上断面的单峰平均间距和平均断面深度.
图9 混合料表面波峰、单位面积上波峰数及峰高标准差

图10 混合料断面轮廓特征
单峰平均间距S的计算公式为
(5)
式中,Si为断面上相邻两峰(局部最高点)的水平距离;n为峰的总数量.
平均断面深度dMPD的计算公式为
(6)
式中,zp为断面上最高点的竖向坐标值;z(xi)为在断面x方向上第i个点的竖向坐标值;K为组成断面图的散点个数.
图11为沥青混合料表面2个方向上单峰平均间距和平均断面深度.由图可知,3种混合料表面x方向与y方向的单峰平均间距和平均断面深度均没有明显差异,说明混合料表面构造在2个方向上差异不明显,无人驾驶车辆横向变道和纵向加速制动过程中,可采用同一构造特征,无需考虑构造的方向差异性.
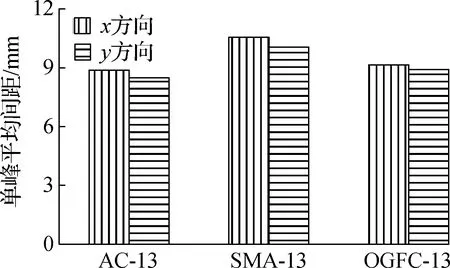
(a) 单峰平均间距
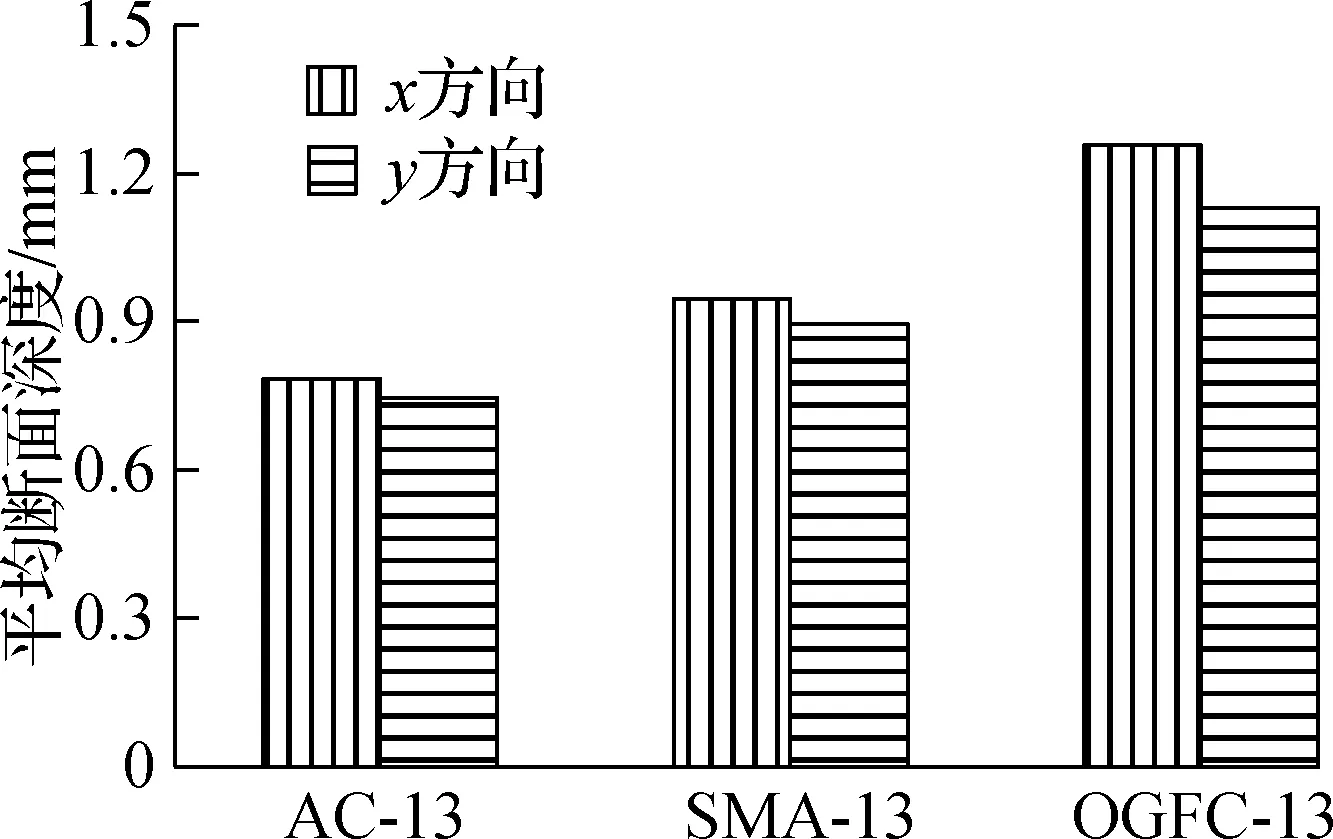
(b) 平均断面深度
5 结论
1) 通过双侧窄角域拍摄图像的特征点匹配、坐标系转化和三维坐标计算,能够建立路表三维点云,实现对三维构造的重建.
2) 基于双侧窄角域摄影重构计算得到的路表构造深度,与环绕摄影建模、铺砂法所测构造深度相当,双侧窄角域摄影表面重构方法适用于光线充足的白天和合适外部光源的夜晚.
3) 提出了采用平均构造深度和构造标准差评价路表构造分布特征,采用单位面积上峰数和峰高标准差间接反映路表波峰耐磨特性.
4) 本文提出的沥青路表三维重构及构造特征分析方法,在无人驾驶应用中可以采用前车向后拍摄+后车向前拍摄方式加以实施,以获取两车之间区域路表构造特征,为后车制定无人驾驶策略提供路表参数.但是,有关路表构造的自动化重建、构造特征计算效率、摄影参数(距离、角度)等还有待后续深入研究.
