基于距离-多普勒补偿的多基雷达协同抗主瓣压制干扰
2021-04-06胡勤振杨建宇吴良斌路成军
胡勤振 杨建宇 吴良斌 高 超 路成军
①(电子科技大学信息与通信工程学院 成都 611731)
②(中国航空工业集团公司雷华电子技术研究所 无锡 214063)
1 引言
有源压制干扰是影响雷达探测能力的主要威胁之一,单基雷达通过波束形成技术可以有效抑制来自旁瓣的干扰。然而,当干扰从雷达主瓣波束进入时,抑制难度大幅提升[1–4]。分布式多基雷达系统利用空间分开布置的多部雷达进行协同探测,当干扰信号和目标信号同时进入雷达主瓣时,利用干扰信号与目标信号在不同雷达站表现的特征差异,可有效抑制主瓣干扰[5–9]。
现有研究[10–15]利用同一干扰信号在不同雷达平台上的相关特性,通过多平台之间的相消处理实现主瓣干扰抑制。文献[10]对多基雷达系统进行了深入的研究,提出了基于多基地雷达的压制干扰抑制方法,分析了相关目标信号与独立目标信号下的干扰抑制性能。文献[11]分析了多基地相参雷达抗主瓣干扰的可行性,提出了改进的两步自适应算法。文献[12]提出了利用最小均方(Least Mean Square,LMS)算法在分布式雷达信号级进行自适应对消处理抑制主瓣干扰的方法,利用目标回波的去相关特性和密集假目标的相参特性,进行信号级融合剔除主瓣干扰。文献[13]研究了基于多基地雷达系统的主瓣干扰抑制后的自适应单脉冲测角技术,通过对和通道与差通道的主瓣干扰抑制,可实现对目标的精确测角。文献[14]提出一种通过干扰辨识来估计纯干扰协方差矩阵的最小方差无失真(Minimum Variance Distortionless Response, MVDR)抗干扰方法,通过对雷达回波脉冲压缩后的1维距离像作时频分析,并根据目标、干扰信号的时频特性差异来辨识目标与干扰,通过干扰样本选择实现干扰抑制。文献[15]虽然考虑了干扰在不同平台之间的传播延时和相对速度差异,将回波信号转换到距离-多普勒域后进行传播延时和多普勒频率差同时估计,但忽略了多普勒频差使同源干扰信号在快时间维度的去相关性。
多普勒频差会导致同源干扰信号在不同平台的相关性变弱,从而影响干扰抑制效果。针对多普勒频差会导致同源干扰信号的去相关性问题,本文重点研究基于多普勒频率补偿的多基雷达协同抗主瓣压制干扰方法。首先,根据多基地雷达系统的对抗场景,建立目标信号和压制干扰信号数字模型。其次,计算不同雷达平台接收到的干扰信号的互相关函数,分析多普勒频差对多平台干扰信号的相关性影响。然后,通过时间-多普勒2维相关函数对传播延时差与多普勒频差进行估计和补偿,实现不同平台主瓣干扰信号级相消抑制。为提高算法效率,提出利用时域的幅度相关估计出传播延时差,再估计出多普勒频差的方法。最后对算法性能进行了仿真分析。
2 信号模型
图1给出了典型的多基雷达协同对抗场景,地面上分散布置了多个雷达平台,包含1个发射平台和多个接收平台,雷达工作在对空搜索模式。敌方目标的干扰机截获到雷达信号后进行干扰,可分为两种场景:多个接收雷达被干扰机的主瓣覆盖,如图1(a)所示;发射平台被干扰机主瓣覆盖,接收平台被干扰机旁瓣覆盖,如图1(b)所示。由于各雷达平台主瓣照射干扰机,因此,雷达平台可收到较强的干扰功率。特别地,当干扰功率很低时,压制效果弱,雷达可能会探测到目标。因此,需要选取受干扰程度较强的雷达平台进行主瓣干扰抑制。
在受到强干扰的雷达平台中,假设第i个雷达的位置为 PR,i=[xR,i, yR,i, zR,i],第1个雷达平台发射信号。目标的位置和速度分别为PT=[xT, yT, zT]和vT=[vxT, vyT, vzT], 目标释放干扰信号。第i个雷达与目标的距离和相对径向速度可分别表示为

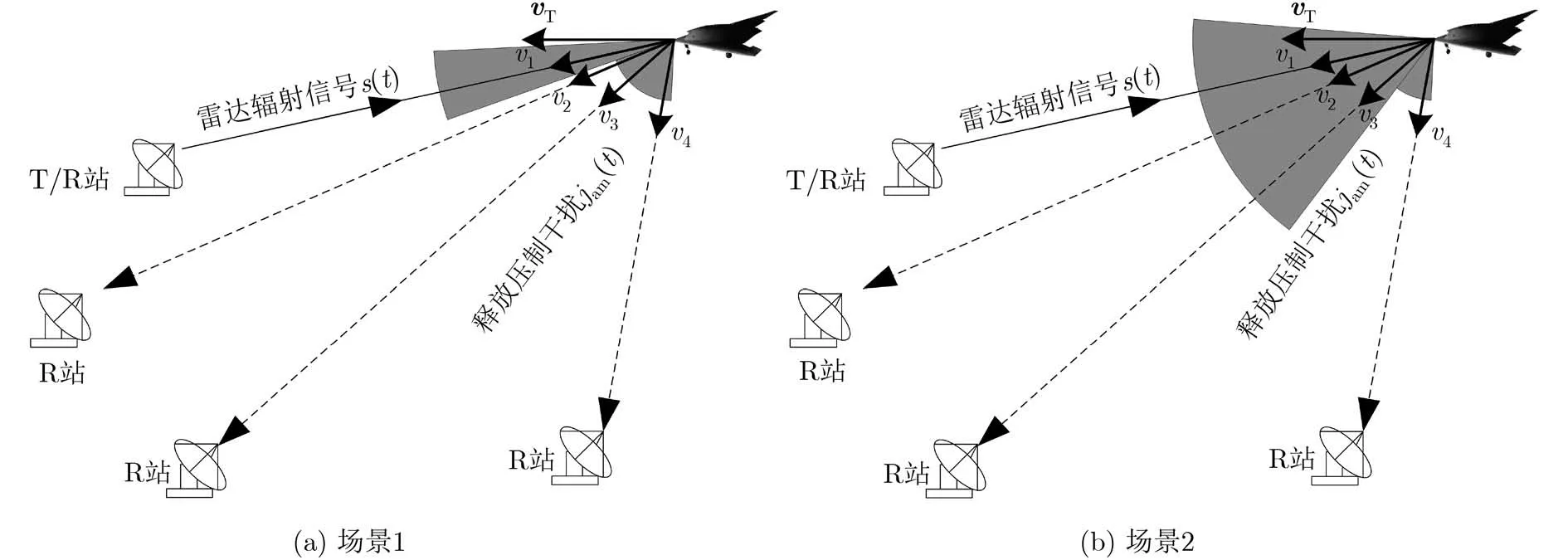
图1 多基雷达协同抗压制干扰场景
式中,fdJ,i=vi/λ为 第i个雷达平台的干扰多普勒频率,βi为干扰回波信号的复幅度,不同平台间的βi的幅度与干扰机辐射增益、路径衰减和雷达接收增益有关,相位随机,单次量测时间内βi可认为是固定值。
雷达接收信号包括目标回波信号、干扰回波信号、噪声以及杂波信号成分,第i个雷达平台接收信号可表示为

式中,ni(t)表示杂波和噪声。不失一般性,主要分析采用两个雷达站的多基雷达系统,即T/R-R型,其中一个雷达站发射和接收,另外一个雷达站只接收。分析过程很容易推广到多个雷达平台情况,每个平台与参考雷达平台进行距离-多普勒估计补偿,实 现多雷达平台的主瓣干扰抑制。
3 相关性分析
多基协同抑制主瓣压制干扰的基本原理是利用目标信号的不相关性和同源干扰信号的相关性,对主瓣压制干扰进行抑制的同时保留目标回波信号。不同雷达站接收到的干扰信号相关性越强,干扰抑制效果越好。从式(4)中可以看出,干扰信号xJi(t)在不同平台的差异性主要体现在路径延时、干扰功率、初始相位、多普勒频差等几个方面,从干扰相关性的角度考虑,初始相位对不同平台的干扰信号互相关性无影响,而多普勒频差会导致干扰信号的去相关。
不同雷达平台接收到的干扰信号的互相关函数可表示为

可以看出,相关系数ρik与 干扰信号相关系数ρik,1(τ)和多普勒相关系数ρik,2(τ)两 个因素决定。ρik,1(τ)与干扰信号在不同平台上的传播延时τik=(Rk−Ri)/c有关,当τ =τik时 ,ρik,1(τ)出现最大值,因此通过ρik,1(τ)的计算,可以估算出干扰机与不同雷达平台的距离延时。ρik,2(τ)的值与多普勒频差和相关时间t的范围有关,即与干扰的样本长度 T有关,其幅度为

可以看出,不同平台之间接收到的干扰信号的相关性与干扰信号到不同平台的距离延时、速度多普勒频差 fdJ,ik=fdJ,k−fdJ,i以及干扰样本长度有关。因此,需要对不同平台的干扰信号的时延和多普勒频差进行补偿,从而得到强相关的干扰信号,通过对消方法进行有效抑制。
4 干扰抑制方法
4.1 基本流程
从上面的分析中可以看出,同源干扰信号在不同平台的相关性主要和传播延时差 τik与多普勒频差 fdJ,ik有关。通过式(4)可得到平台k 与平台i 接收到的干扰信号之间的关系

4.2 幅度相关估计
从式(12)可知,传播延时差和多普勒频差的估计问题为2维联合估计,计算量较大。为了消除时延和速度多普勒的耦合关系,可采用幅度相关方法估计出传播时延,即用时域的幅度相关估计出传播延时差,然后再估计出多普勒频差。
(1) 传播延时差估计。对干扰信号取模运算,可以消除速度多普勒产生的相位变化

即不同平台的干扰信号在幅度上是相关的,只存在距离延时差。因此,可对不同平台雷达回波时域信号取模后进行相关处理

(2) 多普勒频差估计。根据距离延时差估计

5 数值仿真分析
为了分析多普勒频差对多基雷达协同干扰抑制的影响,验证干扰抑制算法的有效性,进行数值仿真试验。假设地面上分散布置了多个雷达平台,包含1个发射平台和多个接收平台,其中有两个雷达受到较强功率的干扰信号,包含1个发射/接收平台和1个接收平台。雷达工作在单脉冲体制下,仿真参数初始设置如下:发射平台的位置为PT,1=[0, 0,0],接收平台位置为PR, 1=[60, 0, 0],目标空间位置为PT=[0, 200, 8],单位为km,目标空间速度为vt=[0, –340, 0];雷达工作频点为f0=2 GHz,单帧观测时间为4 ms,干杂噪比为30 dB,信杂噪比为20 dB。图2给出了初始仿真参数下的各平台回波信号,目标回波信号淹没在强干扰信号中,背景功率估计为45.4 dB。
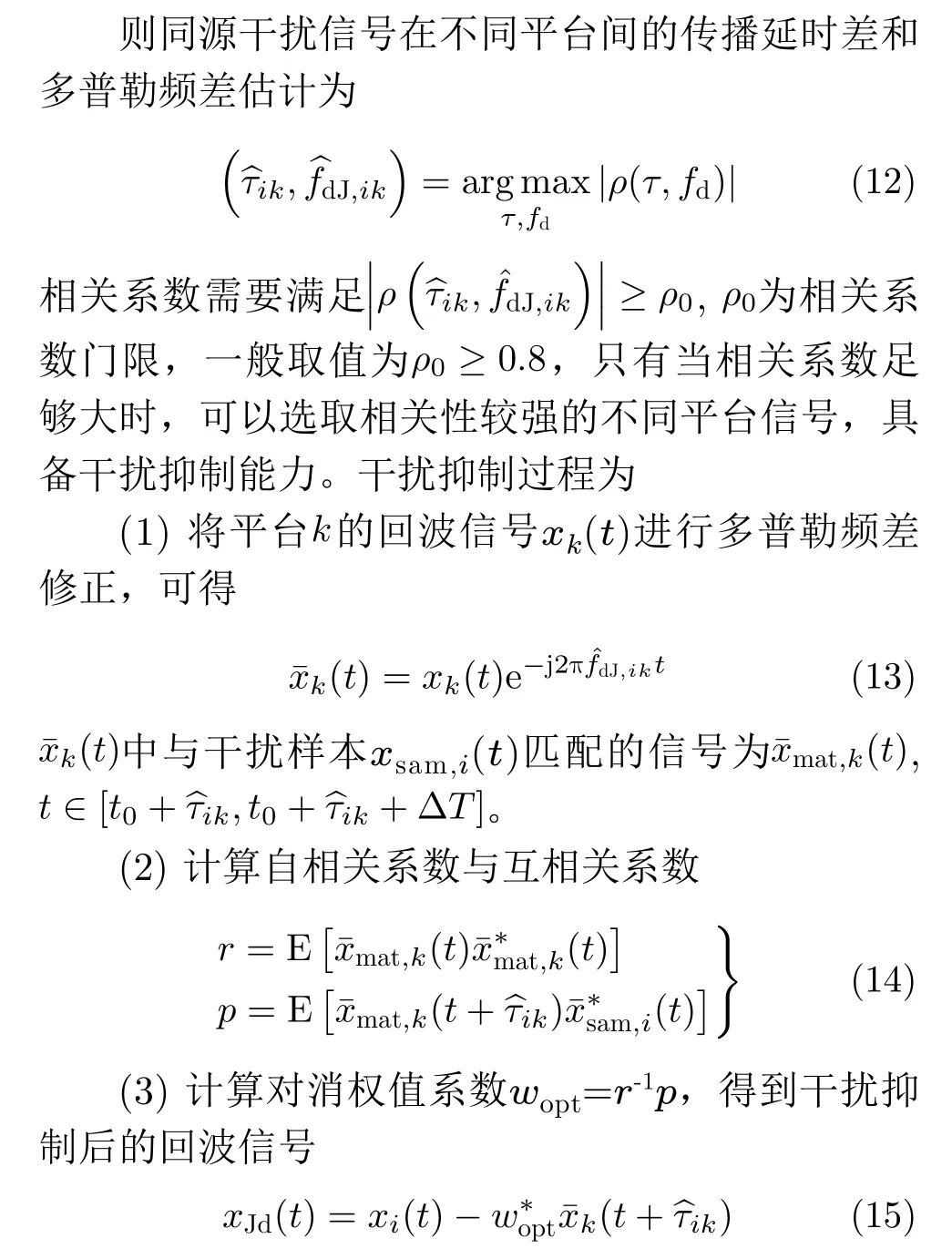
图3对多普勒频差对同源干扰信号的相关特性影响进行了分析,图3中相关系数进行了归一化处理。可以看出,多普勒频差为0时,干扰信号的相关性最强,随着速度差的增大,相关系数减小。从图3(a)和图3(b)可以看出,约束相关系数为0.8,干扰样本为4 ms时,速度差为6.7 m/s,干扰样本为2 ms时,速度差为13.5 m/s。可以看出,干扰样本时间越长,速度差引起的去相关特性越明显。相关性越弱,多平台间压制干扰抑制效果越差。通过对比数值仿真和理论结果,说明了理论分析的正确性。
为了保证不同平台干扰信号的相关性和干扰抑制能力,需要对干扰信号在不同平台的距离时延差和速度多普勒频差进行估计。不失一般性,对图2(a)所示的平台1回波信号在2.0~2.5 ms时间段内选取干扰样本。图4给出了利用式(11)方法得到回波信号相关处理结果,可以看出,同源干扰信号在不同平台的相关性受距离偏移和速度偏差的影响。在距离偏差为8.85 km,速度偏差为14.1 m/s时,相关系数出现最大值。图5给出了利用式(17)和式(19)得到的相关处理结果,可以看出,幅度相关系数在干扰到达的距离偏移为8.85 km时的起伏具有明显特征,可以很容易地检测到,在确定距离偏移后,图4(b)给出了速度偏差估计为14.1 m/s,与图5给出的估计结果相同。
在得到同源干扰信号在不同平台的距离偏移和速度偏差估计后,对接收信号进行延时和补偿,并对干扰进行相消抑制,抑制效果如图6所示。当多普勒频差没有被补偿时,压制干扰不能进行有效抑制,只有干扰样本点位置处具有一定的干扰抑制效果,无法检测到目标。在进行多普勒频差估计补偿后,平台1回波信号的背景功率估计从干扰抑制前45.4 dB降低到18.5 dB,因此干扰抑制了26.9 dB。即在干噪比为30 dB时,通过多平台间信号级干扰抑制,干扰功率抑制了26.9 dB,证明了算法的有效性。
实际应用中,速度多普勒误差估计存在估计偏差,速度估计偏差会降低干扰抑制效果,仿真结果如图7所示。图7中,干杂噪比为30 dB,当对回波数据的速度多普勒误差进行理论补偿时,可获取最大的输出信干杂噪比为21 dB。当速度估计偏差为5 m/s时,输出信干杂噪比为11 dBm,损失10 dB。若要满足不大于3 dB的损失,需要速度估计偏差不高于1.6 m/s。图8给出了不同干杂噪比下的速度估计偏差蒙特卡洛仿真分析结果,蒙特卡洛次数为100,可以看出,干杂噪比越大,速度估计偏差越小,当干杂噪比为30 dB时,速度估计偏差小于0.2 m/s,输出信干杂噪比损失较小。

图2 回波信号数值仿真
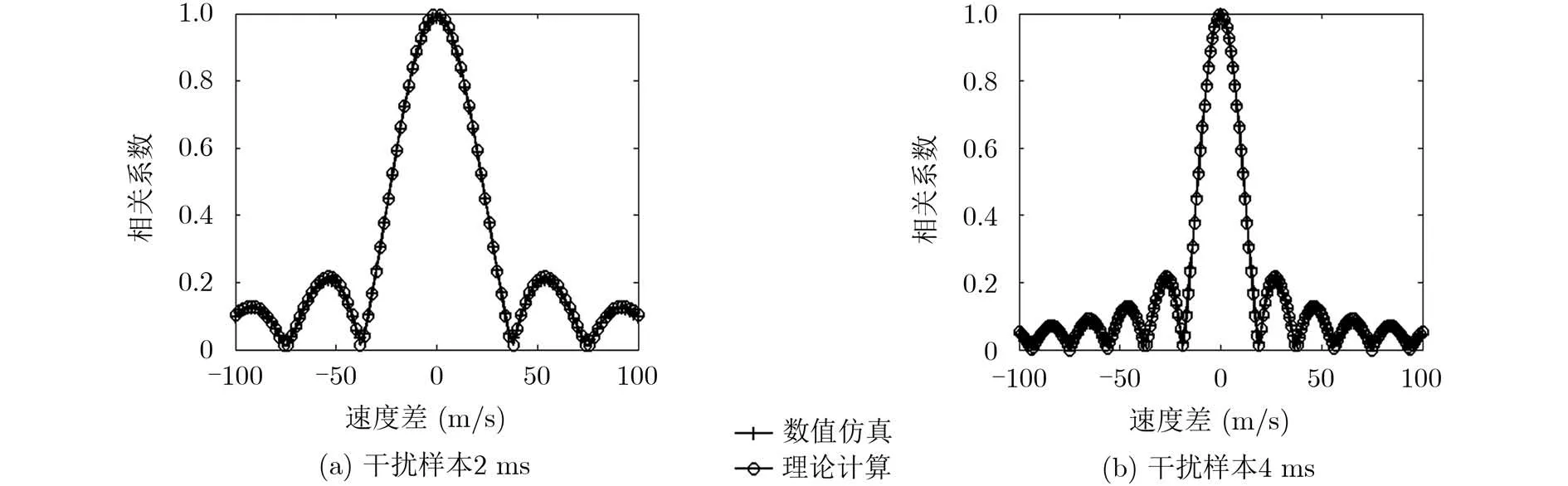
图3 多普勒频差对同源干扰信号的相关特性分析
图4 传播延时差和多普勒频差联合估计

图5 基于幅度相关的传播延时差和多普勒频差联合估计
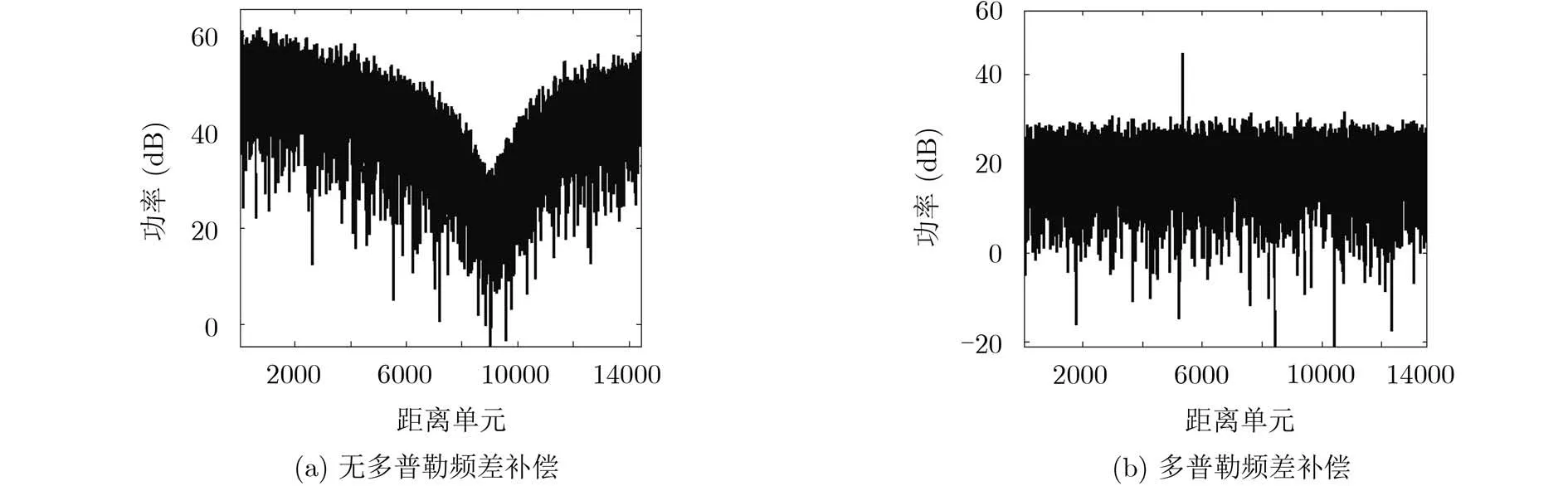
图6 平台1干扰抑制后回波功率

图7 速度偏差对输出信噪比影响

图8 速度估计偏差分析
6 结论
利用目标回波信号的去相关特性和同源干扰信号的相关特性,多平台可实现主瓣干扰的相消抑制。干扰信号在不同平台之间存在距离延时差和速度多普勒频差,会降低干扰信号的相关性,从而影响干扰抑制性能。本文通过信号建模分析了不同平台间多普勒频差对干扰信号的相关性影响,对相关函数进行2维搜索或两步搜索,估计出距离延时差和多普勒频差并进行补偿,实现主瓣干扰信号级相消抑制。在多基雷达对消干扰方法中,不同平台之间的时延估计精度和多普勒频差估计精度会使对消效果下降。
