基于模糊控制的PHEV 转矩协调控制策略研究
2021-04-02谷贵志赵咪樊然然
谷贵志,赵咪,樊然然
(832003 新疆维吾尔自治区 石河子市 石河子大学 机械电气工程学院)
0 引言
随着经济的发展,我国的汽车保有量逐年增加,随之也出现了环境污染、化石能源枯竭、汽车尾气危害等问题,新能源汽车的出现为解决以上问题提供了可能。混合动力汽车(Hybrid Electric Vehicle,HEV)作为一种传统燃油汽车向电动汽车过渡的新能源汽车,因其相比传统燃油汽车具有低排放、低污染等优点,相比纯电动汽车具有续航里程长、不用充电等优点,受到了广大消费者接受和欢迎[1-2]。其中,并联混合动力汽车(Parallel Hybrid Electric Vehicle,PHEV)燃料利用率高、结构简单、有效降低了整车质量和制造成本,具有广阔的发展前景。同时,PHEV 具有发动机和电机双动力源,这种结构使汽车具有多种运行模式,复杂的运行模式需要更加高效的控制策略[3],文献[4]针对不同结构的HEV,采用静态规则控制策略,通过对发动机工作区域的划分,根据整车需求功率所在发动机工作区域确定整车的运行模式,以达到功率合理分配的目的。静态规则控制策略具有简单有效、实用性强等优点,但由于控制参数的大小和阈值主要根据经验设定,理论上控制效果不能达到最优。文献[5]采用实时最优控制策略,运用等效燃油消耗最小思想对PHEV 输出转矩协调控制,合理分配发动机和电机的输出转矩。由于需要实现油耗的实时最优,因计算量大而很难应用于实车运行,文献[6]采用基于动态规划算法的全局最优控制策略,在2 种不同优化目标下对PHEV 最优转矩分配进行求解,通过对比,为更加高效的控制策略提供了依据。由于汽车未来的运行工况是不确定的,全局最优控制策略不能直接应用于实车运行,文献[7-8]采用模糊控制策略分别对插电式PHEV 和PHEV 的转矩协调分配问题进行研究,模糊控制策略均能取得良好的控制效果。由于模糊控制策略的建立不依赖于被控对象精确的数学模型,并具有鲁棒性强、实时性好等优点,本文拟采用模糊控制策略在2 种不同循环工况下对PHEV 转矩协调控制系统进行研究。
1 PHEV 驱动系统结构及运行模式
双轴PHEV 驱动系统结构如图1 所示,其主要包括发动机、离合器、蓄电池、电机、传动系统等。
PHEV 独有的双动力源结构使它既可以单独驱动车辆行驶,又可以联合驱动车辆行驶。当车辆制动或减速时,电机作为发电机为蓄电池充电,回收部分能量。通过对发动机和电机输出转矩的协调控制,PHEV 有纯发动机驱动、纯电机驱动、混合驱动和制动4 种运行模式:
(1)当车辆刚起步或低速运行时,整车需求转矩较低,为使发动机尽可能工作在高效率区,电机单独驱动车辆行驶;
(2)当车辆匀速运行在平直的公路上,根据蓄电池组SOC 的高低,判断发动机是否需要向蓄电池组充电,此时,PHEV 运行在纯发动机驱动模式或混合驱动模式;
(3)当车辆运行在高速、大负荷、爬坡等情况下,发动机所能提供的转矩小于整车需求转矩,此时,发动机和电机共同驱动车辆行驶;
(4)当车辆制动或减速时,发动机关闭,由电机和机械制动机构共同完成制动或减速工作,在保证制动性能的前提下,电机尽可能多地回收制动能量,剩余制动能量由机械制动机构消耗。
2 模糊控制策略的设计
PHEV 转矩协调控制策略的研究,主要是实现整车需求转矩在发动机与电机之间合理的分配,重点是对发动机性能的优化。有2 种控制模式可以用来实现发动机性能的优化:一种是基于燃油消耗的控制策略模式,另一种是基于效率的控制策略模式。本文采用基于效率的模糊控制策略对PHEV 驱动模式下发动机和电机输出转矩协调控制,控制发动机尽可能工作在最大效率点附近,在满足动力性能的前提下,降低燃油消耗和尾气排放,并使蓄电池组SOC 维持在一定范围内。
2.1 模糊控制策略设计原理
模糊控制策略设计原理如图2 所示,主要包括输入参数论域转换模块、模糊控制器模块、输出参数论域转换模块。本文采用双输入单输出的Mamdani 型模糊控制器,以整车需求转矩Treq 与当前转速下发动机最大效率输出转矩Teff 的比值k 作为模糊控制器的一个输入,蓄电池组荷电状态SOC 作为另一个输入,模糊控制器的输出为发动机输出转矩Te。为了使模糊控制器具有一定的通用性,通过输入输出参数论域转换模块对输入输出参数进行论域变换。电机输出转矩Tm由整车需求转矩Treq与发动机输出转矩Te的差值求出。
2.2 输入输出参数论域转换模块的设计
根据模糊控制原理,为了使模糊控制器的一个输入比值k 落在相对应隶属函数的论域中,需要通过输入参数论域转换模块对比值k 进行论域变换。蓄电池组SOC 作为模糊控制器的另一个输入,由于蓄电池组SOC 允许的最大最小值可以直接作为蓄电池组SOC 隶属函数的论域,不需要进行论域变换。
同理,在模糊控制器输出端,输出参数论域转换模块将模糊推理得出的发动机输出转矩论域范围内的精确值转化为发动机输出转矩的实际值。
输入输出参数论域转换模块所采用的计算方法如式(1)、式(2)所示:

式中:U ——论域变换后的值;Umax——论域变换后的最大值;Umin——论域变换后的最小值;U*——论域变换前的值;——论域变换前的最大值;——论域变换前的最小值;R——比例因子。
2.3 模糊控制器的设计
模糊控制器的设计主要包括输入参数的模糊化及隶属函数的设计、模糊规则的设计、输出参数的去模糊化3 个部分[9]。
(1)输入参数的模糊化及隶属函数的设计
模糊控制器的一个输入比值k 通过输入参数论域转换模块缩放到[0,1]论域范围内,将其论域范围划分为7 个模糊子集,模糊集合为{VL,L,RL,N,RH,H,VH},其隶属函数如图3(a)所示。蓄电池组SOC 没有经过论域变换,为保证电池使用寿命,蓄电池组SOC 论域设定为[0.5,0.7],将其论域范围划分为5 个模糊子集,模糊集合为{VL,L,N,H,VH},其隶属函数如图3(b)所示。模糊控制器的输出发动机输出转矩Te的论域设定为[0,1],将其论域范围划分为7 个模糊子集,模糊集合为{VL,L,RL,N,RH,H,VH},其隶属函数如图3(c)所示。
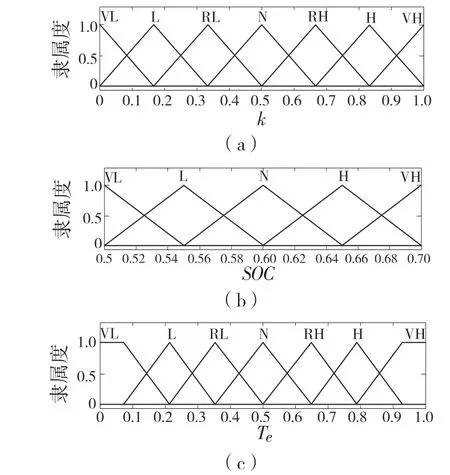
图3 模糊控制器输入输出参数隶属度函数Fig.3 Membership functions of input and output parameters in fuzzy controller
(2)模糊规则的建立
模糊规则是模糊控制器的核心,模糊规则的建立主要有以下依据:
(1)当蓄电池组SOC 很高,整车需求转矩不大的情况下,电机单独驱动车辆行驶,若整车需求转矩大于电机所能提供的最大转矩,发动机和电机共同驱动车辆行驶。
(2)当蓄电池组SOC 适中,整车需求转矩不大的情况下,发动机以大于整车需求转矩的状态运行,多余转矩为蓄电池组充电。若整车需求转矩适中,发动机单独驱动车辆行驶;若整车需求转矩较大,发动机提供的转矩不能满足整车需求转矩要求,发动机和电机共同驱动车辆行驶。
(3)当蓄电池组SOC 很低时,为了保证蓄电池组的使用寿命,在车辆正常行驶的前提下,发动机尽可能以大于整车需求转矩状态运行,提高蓄电池组的荷电状态。
根据输入输出参数论域上模糊子集的划分,建立了35 条模糊控制规则,如表1 所示。
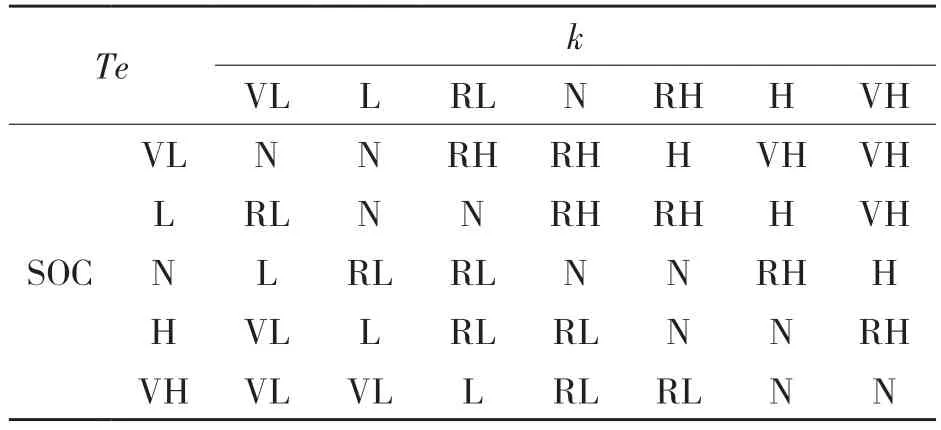
表1 模糊控制规则表Tab.1 Rules of fuzzy control
(3)输出参数的去模糊化
模糊控制器的输出参数为模糊值,需要通过去模糊化处理转化为精确值,去模糊化的面积中心法运算公式如式(3)所示:

式中:u0——去模糊化后的精确值;u——模糊值;a ——u 所在论域中的最小值;b ——u 所在论域中的最大值;A(u)——u 的隶属函数。
3 整车建模及仿真分析
3.1 整车建模与仿真参数的确定
基于MATLAB/Simulink 仿真平台在ADVISOR汽车仿真软件上对PHEV 进行整车建模,主要包括整车控制模块、整车模块、循环工况、车轮与半轴模块、主减速器模块、变速器模块、离合器模块、控制策略模块、转矩耦合器模块、电机与控制模块、发动机模块、能量储存器模块、排放后处理模块等[10],本文主要对控制策略模块进行设计。PHEV 主要部件仿真参数如表2 所示。

表2 PHEV 主要部件仿真参数表Tab.2 Main components simulation parameters of PHEV
图4 为模糊控制策略模块仿真框图,将设计的模糊控制策略模块与其它模块共同完成PHEV整车模型的建立。
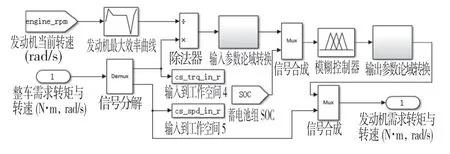
图4 模糊控制策略模块仿真框图Fig.4 Simulation block diagram of fuzzy control strategy module
3.2 仿真结果对比分析
循环工况选择新欧洲行驶工况(CYC_NEDC)和美国城市行驶工况(CYC_UDDS),其主要参数如表3 所示。为了更好地查看PHEV的续航能力,循环次数均选择为5 次。

表3 NEDC 和UDDS 循环工况的主要参数表Tab.3 Parameters of NEDC and UDDS cycle conditions
根据选择的仿真参数和循环工况,在ADVISOR中分别对模糊控制策略和电机辅助控制策略下的整车模型进行仿真,并对仿真结果对比分析。
(1)蓄电池组SOC 变化曲线对比分析
图5 为采用电机辅助控制策略和模糊控制策略在2 种循环工况下的蓄电池组SOC 变化曲线图。从图中可以看出,在经过5 个循环周期后,NEDC 循环工况下,电机辅助控制策略和模糊控制策略的蓄电池组SOC 的值分别为0.610 和0.591,UDDS 循环工况下,电机辅助控制策略和模糊控制策略的蓄电池组SOC 的值分别为0.615和0.605,2 种控制策略下的蓄电池组SOC 相差不大,且都可以实现蓄电池组SOC 在一定范围内的动态平衡,模糊控制策略满足设计要求。
(2)整车燃油经济性和排放性能对比分析
表4 为2 种循环工况下分别采用电机辅助控制策略和模糊控制策略的整车燃油经济性和排放性能。从表4 可以看出,NEDC 循环工况和UDDS 循环工况在经过5 个循环周期后,模糊控制策略相对于电机辅助控制策略下车辆的百里油耗分别降低了10.4%和8.7%。从排放性能来看,模糊控制策略相对于电机辅助控制策略下车辆的HC 排放量有少量的增加,车辆的CO 排放量明显减少,在UDDS 循环工况下,车辆的NOx 排放量有少量减少,由于NEDC 循环工况后半段车辆运行在高速状态,根据设计的模糊控制规则,此时整车需求转矩较高,蓄电池SOC 适中,发动机运行在高转矩状态,这导致在NEDC 循环工况下,车辆的NOX排放量反而有所增加。
(3)发动机工作点对比分析

图7 2 种控制策略在UDDS 循环工况下发动机工作点分布图Fig.7 Distribution of engine operating points for two control strategies under UDDS cycle condition
图6 和图7 为在2 种循环工况下分别采用电机辅助控制策略和模糊控制策略的发动机工作点分布图。相较之下,当使用电机辅助控制策略时,发动机工作点分布较为分散,发动机工作效率不高,而使用模糊控制策略时,发动机工作点较为集中地分布在发动机工作效率较高的区域。对比结果表明,模糊控制策略下,发动机的平均工作效率高于电机辅助控制策略。
4 结论
针对PHEV 的转矩协调分配问题,建立了一种双输入单输出模糊控制器,使用MATLAB/Simulink 和ADVISOR 软件联合完成PHEV 整车模型的搭建,根据选择的汽车主要部件仿真参数和循环工况,利用ADVISOR 软件对不同循环工况下采用电机辅助控制策略和模糊控制策略搭建的整车模型进行仿真。仿真结果表明,在保证PHEV 整车性能的前提下,2 种控制策略都能够维持蓄电池组SOC 的动态平衡,相较于电机辅助控制策略,本文提出的模糊控制策略能够更好地控制发动机工作在高效率区,进一步提高了PHEV 的整车燃油经济性和排放性能。
