高频动态多星座GNSS数据的周跳低时延解算方法
2021-04-01任小杰黄丁发
冯 威,任小杰,张 熙,黄丁发
1. 西南交通大学地球科学与环境工程学院,四川 成都 611700; 2. 自然资源部第三大地测量队,四川 成都 610100
高精度载波相位观测在精密定位和导航应用中起着重要的作用。由于地表观测GNSS信号相对较弱,易受干扰、遮挡等影响,载波相位观测值中常会发生周跳。文献[1]指出若周跳未能被准确地探测或修复,将导致整周模糊度参数失效,需要重新固定整周模糊度,影响GNSS导航定位的性能。在高动态RTK应用中,常用到10 Hz甚至高采样率的GNSS数据,且数据采集过程中周跳现象频繁发生,这直接影响GNSS高精度动态定位在高速应用场景中的实用性能,为此快速高效的低时延周跳修复方法势在必行。
目前,探测与修复周跳的方法主要有伪距相位组合法[2-6]、电离层残差法[7-10]、多项式拟合法[11-12]、多普勒积分法[13-14]、小波分析法[15-17]、高次差法[18]、卡尔曼滤波法[19-20]等。试验证明这些方法都具有较好的探测及修复效果,但也存在不足之处。例如,伪距相位组合法,探测效率高、程序容易实现,但其探测能力主要取决于电离层延迟和多路径效应在历元间的变化以及伪距和载波相位观测噪声、载波波长大小等[5-6,21];电离层残差法可较好地探测周跳,但传统的电离层残差法没有很好地解决周跳发生在哪个频率的问题,且对于组合周跳的问题一般需要一些辅助的方法联合求解[22-24];质量控制理论也常用于周跳探测,通过整数最小二乘估计法可以获得更高的准确性,但由于需要进行搜索,周跳计算的算法复杂度高,周跳修复耗时增加[25-28]。
自动驾驶、无人机等高速RTK应用场景需要实时处理超高频的GNSS数据,在这种情况下,低时延的周跳探测及修复至关重要。随着接收机硬件性能提升,GNSS数据观测质量也得到了提升[29-30],这为更高效率的周跳修复处理提供了基础。本文针对单站动态接收机的高频GNSS数据,提出了一种基于观测值域的周跳探测方法OMGF。首先介绍了改进的几何无关(MGF)相位组合,进行小周跳的探测及修复;在MGF基础上,再结合高频GNSS数据的噪声特征,实现了基于观测值的周跳修复方法OMGF。利用实测数据对该方法进行试验和分析,并对试验结果进行讨论。
1 改进的几何无关(MGF)组合及其特性
1.1 MGF组合
几何无关相位组合通常也称为电离层残差组合,文献[22]指出其定义如式(1)所示
φGF=φ1-φ2=N1λ1-N2λ2+(γ-1)I1+εφGF
(1)

在大多数情况下,由于GF组合没有接收机钟差和卫星与接收机之间的几何距离,而被广泛用于周跳探测。但是,GF组合不能直接修复各频率发生的周跳。针对高频GNSS数据,文献[31]对GF组合进行了改进,得到MGF组合量,以实现双频相位数据中单个频率上的小周跳的直接解算,其表达式如式(2)所示
(2)
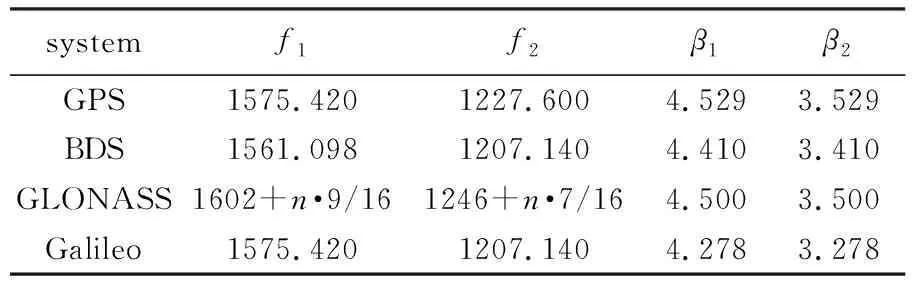
表1 不同GNSS系统的β1和β2值[31]
1.2 MGF误差分析
假设测量噪声在历元之间不相关,且忽略高频GNSS数据电离层项δI1,根据误差传播定律可估计出δN2和δN1的方差,如式(3)所示
(3)
式中,σ1和σ2分别表示L1和L2载波相位观测值的中误差。假设σ1=σ2=1 mm,δNi(i=1,2)的中误差约为0.04周。
这里定义符号R(·)为四舍五入,则实数到最近整数的距离表示如式(4)所示
DNI(x)=|R(x)-x|
(4)
文献[31]指出MGF组合正确修复周跳需要满足如下条件
(5)
根据式(5),相位几何无关组合量需要满足如下条件

(6)
2 高频数据OMGF周跳修复
2.1 OMGF修复方法
MGF组合可以快速准确探测各频率上的周跳,其所能修复L1和L2频率上载波相位的周跳区间分别为[-4,4]和[-3,3][31]。对于超出上述范围的周跳,可结合伪距观测量计算得出(见式(7))
(7)
式中,δP代表历元间的伪距变化量,可采用原始观测量或者参数估计量计算得到,δNi,p为周跳初值。根据MGF方法的适用条件可知,其只能修复L1上小于5周,L2上小于4周的周跳,因此,δNi,p的修复结果需要满足以下条件
(8)

基于MGF组合观测量与高频观测值噪声特性的OMGF周跳修复的主要步骤:首先用伪距相位组合进行初始修复,将初始周跳修复至MGF适用的范围;然后用MGF组合对上述初始周跳进行小周跳修复,得到初始周跳修正值;最后将前两步所得周跳值取整相加,得到最终的周跳。周跳计算公式如式(9)所示
δNi=R(δNi,p)+(e-(δOMGFi)d)βi
(9)
由于e存在两个备选值{0,Sgn(δOMGF)},δNi也存在两个备选值δNi(1)、δNi(2)。基于周跳的整数性质,选择较小的DNI(δNi)对应的δNi作为最终修复值
(10)
2.2 正确率分析
根据式(8)和式(9),为了使OMGF方法可以探测出所有周跳,要求利用伪距得到的初始周跳与其周跳真值差值需满足以下条件
(11)
根据式(11),各卫星系统的伪距观测噪声应该在下列范围内
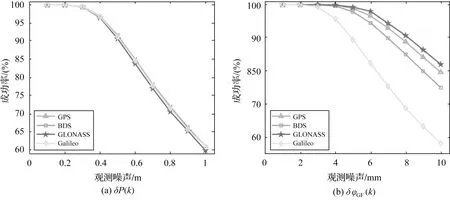
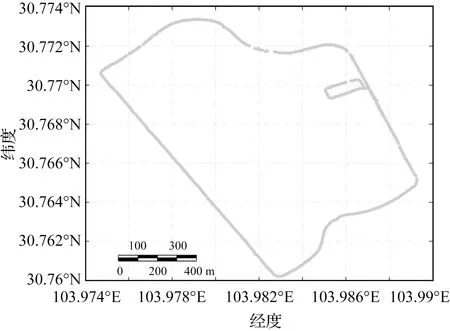
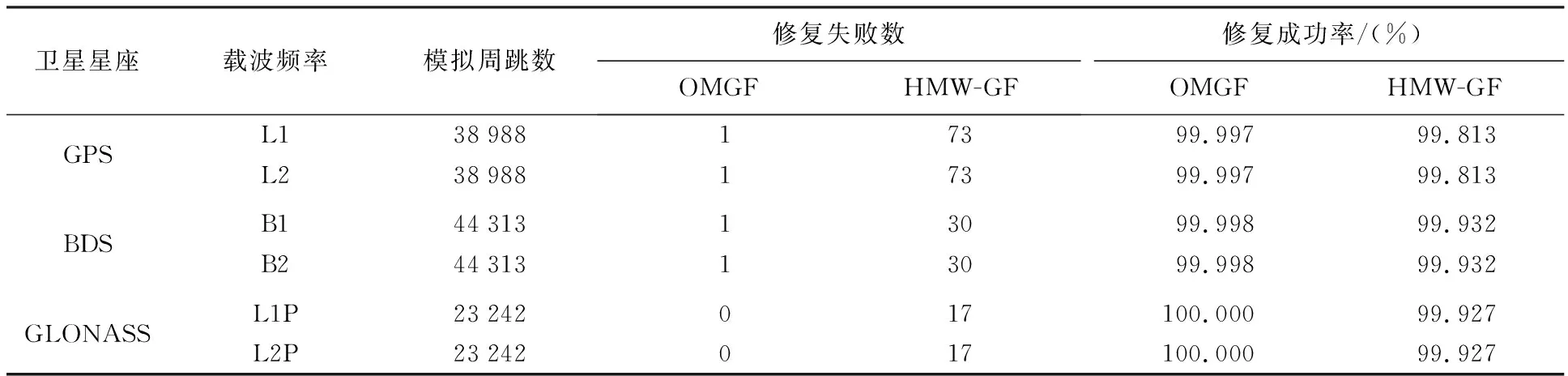
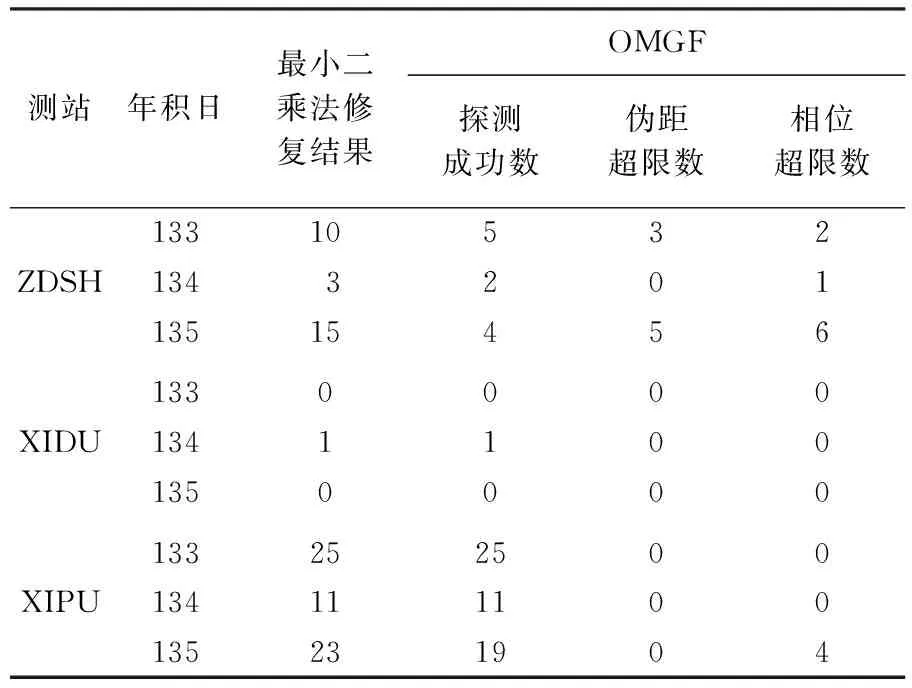
ε(δP)sys (12) 假定δNi服从正态分布,根据式(9),结合文献[32]标量取整成功率的估计方法,OMGF得到正确周跳修复值的概率为 Min(4.5λ1,3.5λ2))∩ 这一过程可视为一种特别的电镀:在精铜上再镀铜。在粗铜中的杂质有三种去向:①比Cu活泼的Fe、Zn、Ni等失电子后变为Zn2+、Ni2+、Fe2+进入溶液,由于氧化性比Cu2+弱,故不会在阴极上析出;②比Cu2+不活泼的金属Ag、Au、Pt还来不及失去电子就以单质形式下沉;③泥沙等物理杂质与上述不活泼金属一同沉入槽底成为阳极泥,因此阳极的杂质对电解铜产品的纯度无影响。 P(|ε(δφGF(k))sys|≤ (13) 图1 δP(k)和δφGF(k)噪声水平与周跳修复成功率Fig.1 δP(k) and δφGF(k)noise level and success rate of cycle hop repair 本文采用2019年9月11日实测的动态数据和2020年1月13日实测的静态数据进行OMGF周跳试验分析,数据均为双频多星座20 Hz的高频数据,卫星系统包括GPS、BDS和GLONASS,动态数据和静态数据用不同品牌的接收机采集,接收机板卡均为天宝BD990[33],时长分别为30 min和40 min。动态数据的运动轨迹如图2所示。 图2 动态试验的运动轨迹Fig.2 Motion trajectory of dynamic experiment 利用静态和动态试验数据,分别对伪距观测噪声和相位观测噪声水平进行分析。静态试验数据中,GPS、BDS和GLONASS系统的有效观测个数分别为:405 789、535 132和228 034;动态试验数据中,3个系统的有效观测个数分别为:193 596、221 644和115 285;忽略相位噪声,基于历元差分的伪距和相位观测数据提取各卫星系统所有卫星的双频伪距观测值偏差δP(k)序列,如图3、图4所示。可以看出,静态与动态的超高频试验数据的各卫星系统历元间差分的伪距观测量的噪声水平优于0.1 m。 基于历元差分的GF组合观测量,分系统提取所有卫星的历元间差分的相位几何无关组合量δφGF(k)序列如图3、图4所示,各系统相位几何无关组合量的噪声水平均优于1 mm,除了动态试验观测的GLONASS相位。结合伪距与相位组合量的噪声分布情况,根据式(13),可以计算得出,伪距相位组合将周跳范围缩小到MGF组合观测值域以内的成功率接近100%。 通过对动态实测数据加模拟周跳来验证OMGF周跳修复算法的性能。模拟周跳如下:模拟周跳历元间隔为0.25 s,模拟历元数为5832个。各卫星f1频率依次模拟周跳大小为:[-16,-14,-12,-10,-4,-3,-2,-1,1,2,3,4,6,8,10,12]周。f2频率依次模拟周跳大小为:[-12,-9,-6,-3,-2,-1,1,2,3,6,9,12]周。分别用OMGF方法和HMW-GF(Hatch-Melbourne-Wübbena and geometry-free combina-tion)方法进行周跳探测和修复,并对比分析修复结果。测试过程使用相同的软硬件环境,且仅统计两种方法周跳探测与修复模块的耗时,统计结果见表2。 图3 静态数据δP(k)和δφGF(k)序列Fig.3 Static observation data δP(k) and δφGF(k) time series chart 图4 动态数据δP(k)和δφGF(k)序列Fig.4 Dynamic data δP(k) and δφGF(k) time series 由表2可知,OMGF方法在各个系统探测周跳成功率均高于HMW-GF组合。尤其在GLONASS系统中,OMGF方法更是达到了百分百的修复率,GPS、BDS系统修复成功率次之。 经统计,OMGF方法探测耗时1684 ms,HMW-GF组合耗时101 310 ms,两者周跳处理平均每个历元的时间延迟分别为0.06和3.47 ms,OMGF方法比HMW-GF组合方法快60倍。 逐历元解算静态和动态试验数据的伪距和相位组合量δP和δφGF,统计伪距和载波相位组合量偏差超限历元的相位组合量偏差、伪距偏差、高度角、信噪比等见表3。由于伪距或者组合相位偏差超出阈值,若这些历元发生周跳,利用OMGF方法将会得到错误的周跳修复结果。试验数据中,共有28个偏差超限历元,其中伪距偏差超限3个,相位偏差超限25个。 表2 模拟周跳修复结果统计 表3 相位和伪距观测值偏差超限结果分析 静态试验数据中,载波相位几何无关组合量偏差超限时,对应历元信号的信噪比较低,如G14卫星L2信号的信噪比仅为12.6。动态试验数据中,载波相位几何无关组合量偏差超限时刻,均出现在数据中断观测历元附近,运动过程中信号受到遮挡、干扰等是造成相位偏差超限的主因。可以看出,OMGF方法对相位观测值的噪声水平较为敏感,当相位噪声水平增大时,方法正确率降低。 为了测试方法探测与修复实际周跳的性能,分别采用最小二乘方法和OMGF方法对ZDSH、XIDU、XIPU 3个CORS站的观测数据进行周跳探测与修复试验,数据采样间隔为1 s,观测星座包括GPS、BDS和GLONASS,观测时间为2020年的DOY 133、DOY 134和DOY 135连续3 d。ZDSH位于山坡,低高度角部分有山体遮挡;XIDU在高楼楼顶,无遮挡;XIPU位于低楼层楼顶,有部分墙体遮挡。3个CORS站某时刻卫星分布如图5所示,ZDSH、XIPU、XIDU 3个CORS站一天的有效观测数据分别为1 784 753、1 807 005和1 982 369。 图5 测站卫星分布Fig.5 Satellite map of each station 试验过程中,以最小二乘方法修复的周跳为真值来对比分析OMGF方法的有效性,周跳修复试验结果见表4。 表4 1 Hz GNSS数据实测周跳修复结果 由表4可知,ZDSH站共发生28个周跳,OMGF方法成功修复了11个。分析修复失败历元数据得出,伪距超限8次,相位观测噪声超限9次;XIPU站共发生59个周跳,其中由于相位噪声超限导致4个历元探测失败;XIDU站仅发生1个周跳,周跳得到成功修复。可以看出,周跳修复效果与观测环境下受遮挡的情况相关,遮挡相对严重的ZDSH站周跳修复效果最差。进一步统计周跳修复失败数据的卫星高度角,结果表明最小高度角为16.19°,最大高度角为25.4°,高度角均值为23.09°,周跳修复失败均发生在卫星高度角较低的情况。OMGF方法对观测噪声较为敏感,对观测值进行滤波降噪将有利于进一步提升方法的正确率。 针对高频动态GNSS数据的周跳快速高效修复,本文提出了一种低延时的周跳处理方法OMGF。 (1) 针对GPS、BDS和GLONASS系统,推导了OMGF方法的伪距和相位观测值误差的限差,以及方法周跳修复的成功率。当伪距观测值噪声为0.2 m,载波相位观测值噪声为1 mm时,方法的成功率为99.997%。 (2) 利用20 Hz GNSS单站动态观测数据对OMGF方法进行试验分析。结果表明,OMGF方法能快速有效地修复周跳,成功率达到99.998%。与HMW-GF组合相比,OMGF运算速度提高了60倍,且周跳修复失败历元数从240降低到4。 (3) OMGF方法基于单颗卫星的载波相位与伪距观测量直接估计单个频率上的周跳,探测过程仅需单颗卫星连续两个历元的观测数据,周跳修复的算法复杂度低,计算效率高,有利于算力资源受限的移动端超高频实时动态定位数据的在线处理。 (4) OMGF方法进行高频数据周跳计算时,主要受未建模的高频观测值噪声影响。观测过程多路径高频变化、大气高频扰动等因素是造成OMGF错误计算周跳的主要潜在原因。


3 高采样率GNSS数据周跳修复试验
3.1 20 Hz数据伪距与相位噪声分析
3.2 模拟周跳修复对比分析



3.3 实测周跳试验分析

4 结 论