高分七号卫星双波束激光测高仪在轨几何检校与试验验证
2021-04-01唐新明谢俊峰窦显辉李少宁黄庚华付兴科朱广彬欧阳斯达唐洪钊
唐新明,谢俊峰,莫 凡,窦显辉,李 新,李少宁,李 松,黄庚华,付兴科,刘 仁,朱广彬,欧阳斯达,唐洪钊,陈 辉
1. 自然资源部国土卫星遥感应用中心,北京 100048; 2. 中国科学院合肥物质科学研究院,安徽 合肥 230031; 3. 湖南科技大学空间信息技术国家地方联合工程实验室,湖南 湘潭 411201; 4. 武汉大学电子信息学院,湖北 武汉 430072; 5. 中国科学院上海技术物理研究所,上海 200083
星载激光测高仪具有主动性、精确性等优点,能够获取高精度的地表高程信息。近年来,世界各航天强国争先发展星载激光测高技术[1-2]。由于卫星发射时的振动以及入轨后空间环境变化等因素影响,导致星载激光测高参数实验室设计值与在轨实际值存在系统偏差,严重影响激光测高精度,因此必须开展激光测高仪在轨几何检校,以获得高精度的激光测高数据[3-4]。目前,星载激光测高仪在轨几何检校主要包括地面靶标法和基于地形法两类[5],地面靶标法主要包括:地面探测器检校法[6-8]、机载红外相机成像检校法[9]、角棱镜辅助法[10]等;基于地形法主要包括平坦地形检校法[11]、倾斜地形检校法[12-13],其中地面探测器检校法是现有方法中精度最高的方法,也是工程中应用最多的方法之一。
2003年,美国发射的ICESat卫星首次搭载对地观测激光测高系统[14](geoscience laser altimeter system,GLAS),经过在轨几何检校后测高精度优于0.15 m[15]。2016年,我国发射的资源三号02星搭载了一套激光测高试验性载荷,主要用于辅助光学载荷1∶5万立体测图[16]。经过在轨几何检校,其测高精度优于1.0 m[8]。2018年,美国发射了用于研究森林资源评估、全球气溶胶、大气颗粒物运输等多波束ICESat-2单光子激光测高卫星[17],经过在轨几何检校,其森林地区相对机载点云测高精度优于0.75 m[18],平静湖面的相对测高精度优于0.06 m[19]。2019年11月3日,高分七号卫星在太原卫星发射中心成功发射升空,其搭载了一套双波束激光测高系统[20-24],用于辅助光学相机1∶1万立体测绘。
为了挖掘高分七号卫星激光测高精度潜能,本文充分利用下传原始波形数据以及双波束同时观测的特点,提出了由粗到精“两步法”激光在轨几何检校。首先开展单波束激光在轨几何检校,得到初步的激光指向参数;再进行双波束激光联合在轨几何检校,实现激光系统误差参数高精度在轨几何检校。
1 高分七号卫星激光测高系统
高分七号卫星激光测高系统由4台激光器(其中2台主份,2台备份,4台激光器可独立工作)、2台足印相机、1台光轴监视相机共同组成。高分七号卫星双波束激光测高仪如图1所示。
高分七号卫星激光测高系统具备回波记录能力,采用0.5 ns的采样间隔记录最大1200帧波形数据,可识别地球表面最大90 m高差的地形地物。经实验室测定,真空条件下,每台激光器可发射脉冲大于1×108次,主备份激光器共可发射2×108束激光,设计工作寿命8年。单波束(单台)激光器基本参数如表1所示。
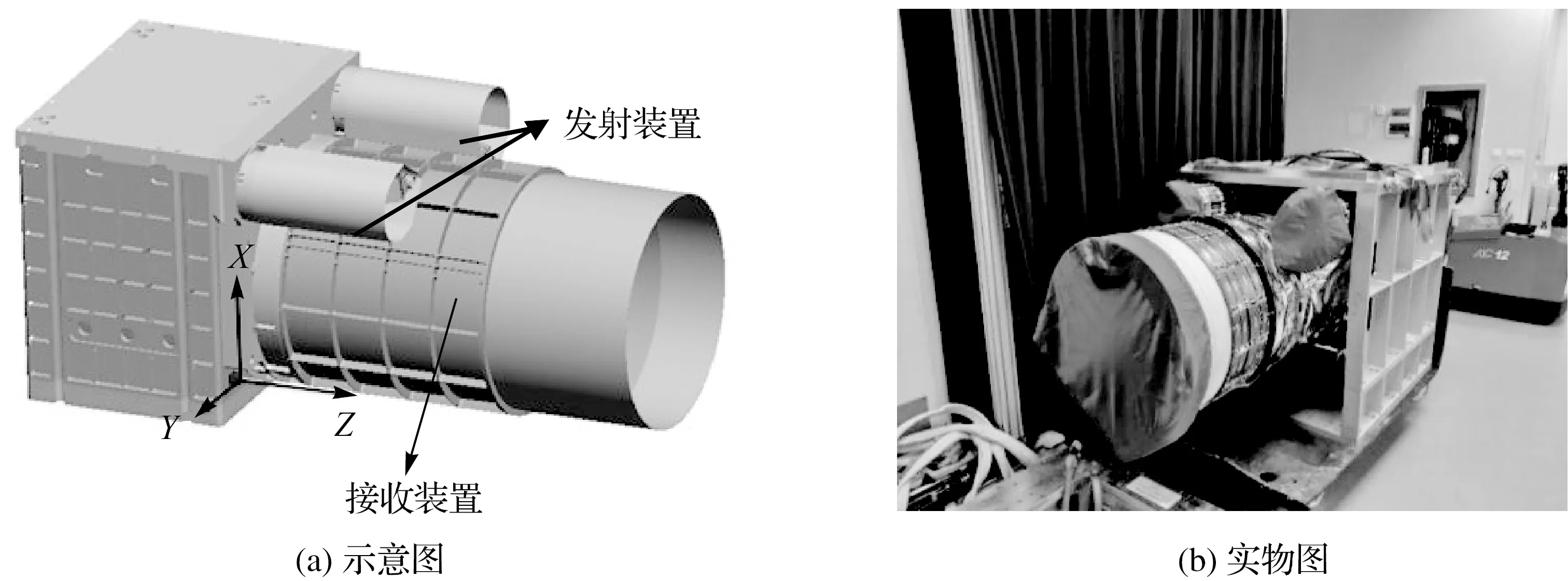
图1 高分七号双波束激光测高仪Fig.1 GF-7 double-beam laser altimeter
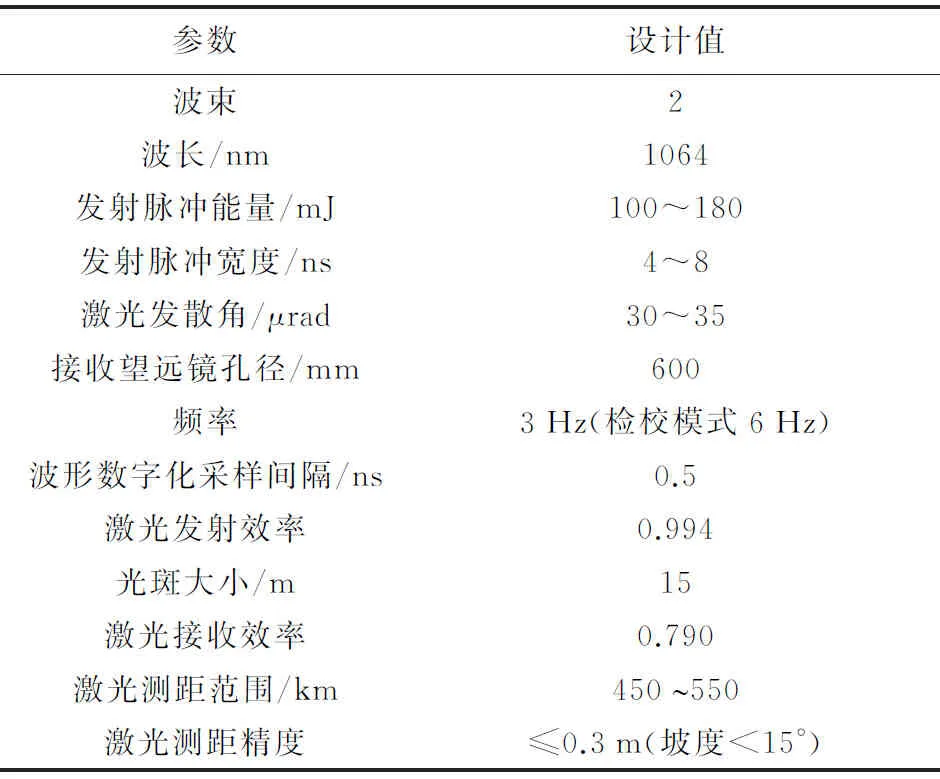
表1 高分七号卫星激光测高仪基本参数
高分七号卫星激光测高系统的双波束同步对地观测体制如图2所示,其中飞行方向右侧波束为波束1,左侧为波束2,各波束与天底方向夹角均为0.7°,双波束对应地面足印间距约为12.25 km。
2 双波束激光在轨几何检校
“两步法”激光在轨几何检校主要包括基于波形分析的单波束激光粗检校和基于地面探测器的双波束激光精检校。
2.1 基于波形分析的单波束激光粗检校
2.1.1 基于波形分析的足印位置确定
激光测仪回波波形可精确反映地表光斑内地物的垂直信息[25]。根据激光特殊回波波形分析,可大致判断其落点与对应地面特殊地物的相对位置关系。本文采用利用特殊地物的典型回波波形前后峰值,精确判断特殊地物垂直高度,如图3所示。外业实测该地面光斑附近一定范围内所有地物高度。假设该光斑附近一定范围内共有i个不同高度地物,依次对比每个地物与波形确定的地物的高差,高差最小且小于阈值,则判定光斑落在该地物上。
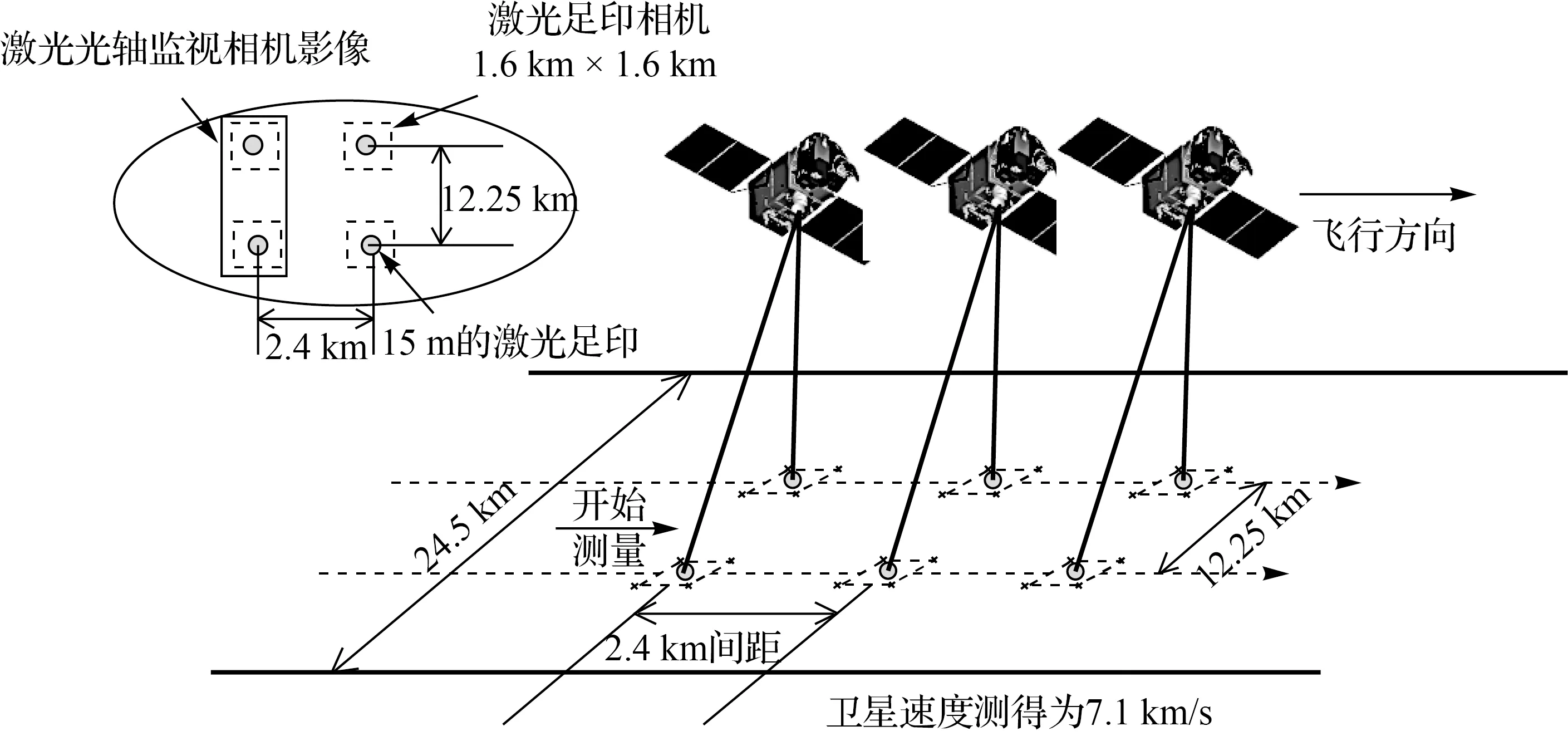
图2 高分七号卫星激光测高仪在轨运行示意Fig.2 Working schematic diagram of the GF-7 spaceborne laser altimeter system
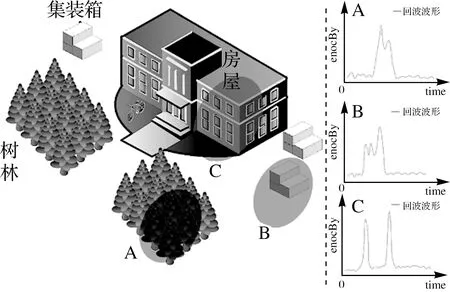
图3 典型地物及其激光回波波形Fig.3 Typical ground feature and its laser echo waveform
典型地物及波形可推算地物的垂直高度变化,辅助确定激光光斑实际落点位置,理论公式如式(1)所示
Δhi(lati,loni)=hi-hwaveform
(1)
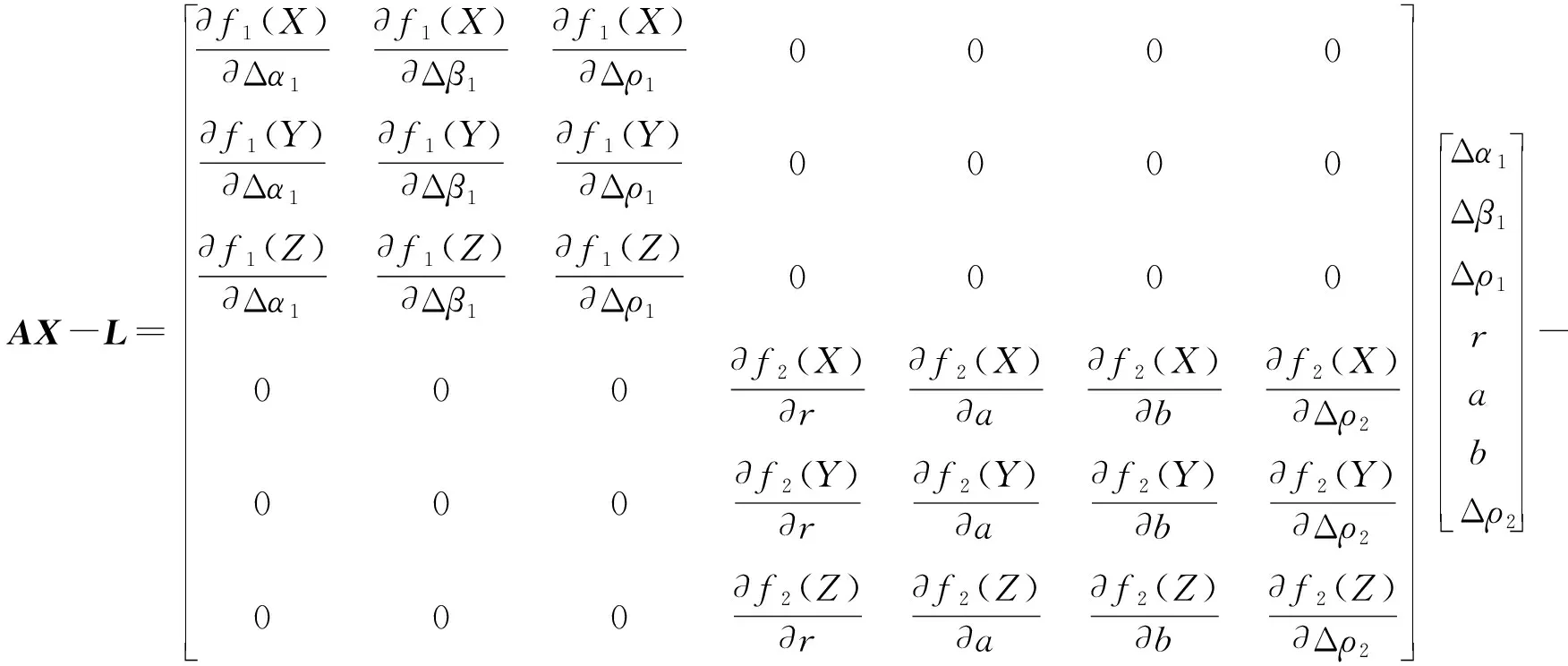
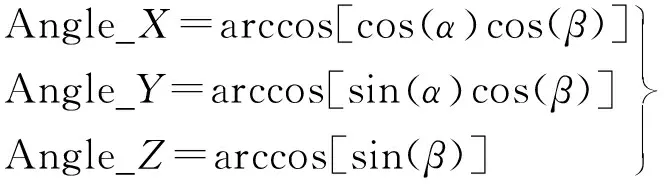
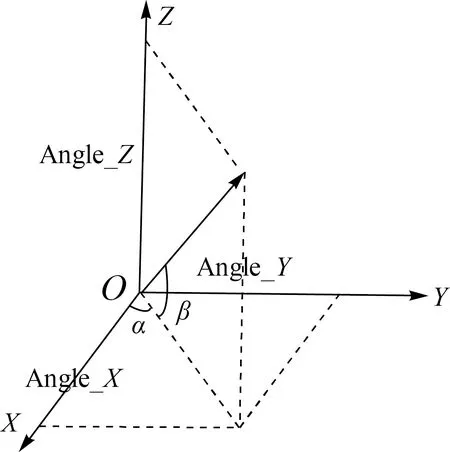
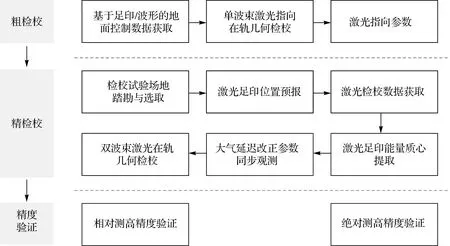
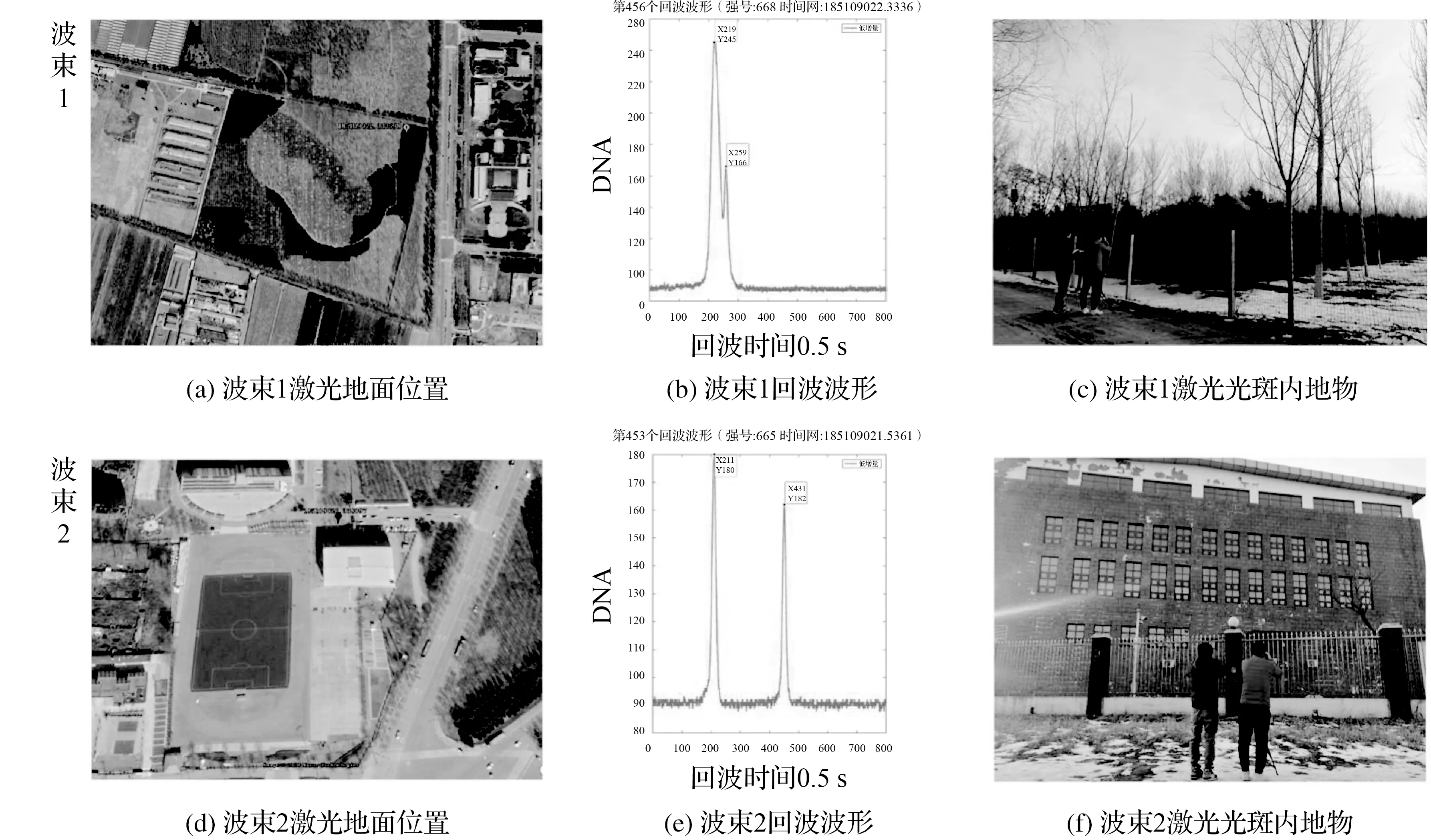
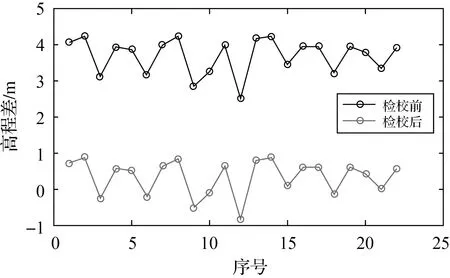
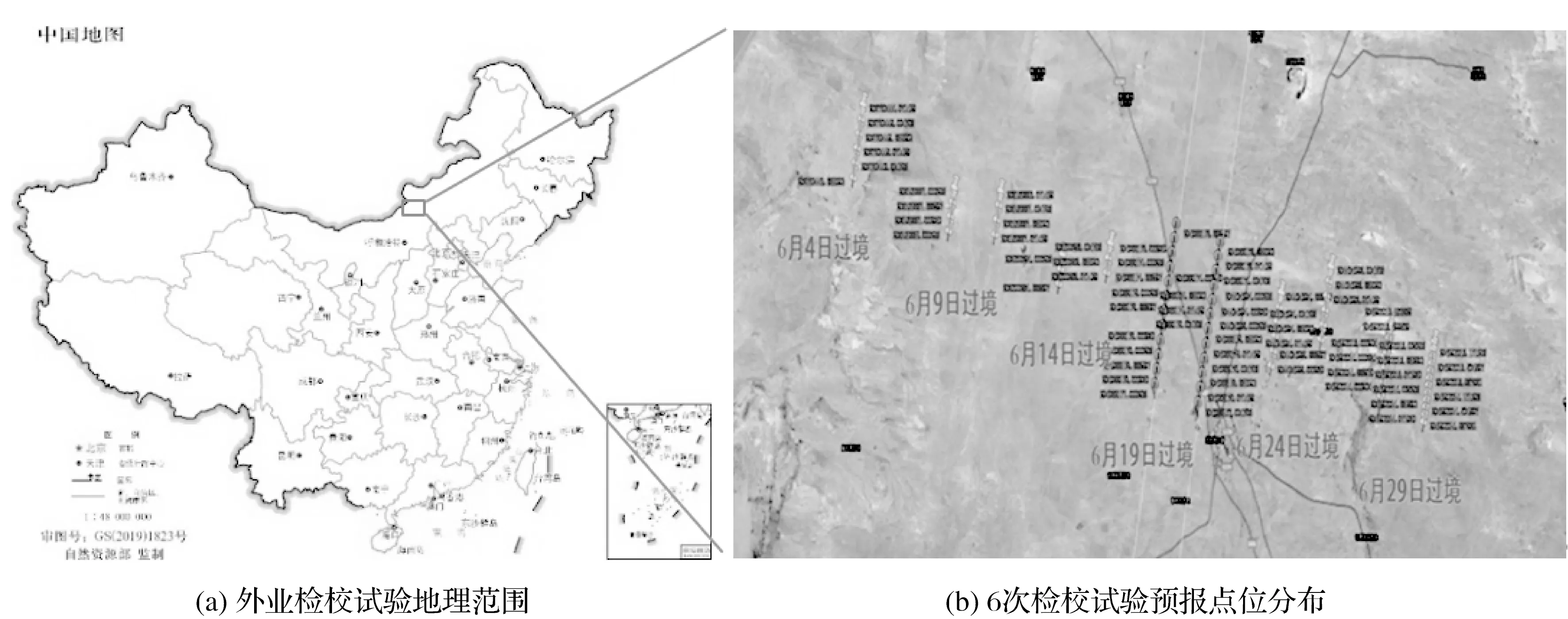
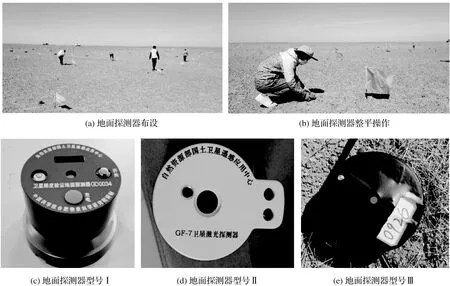
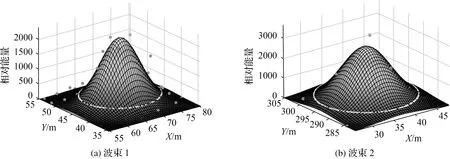
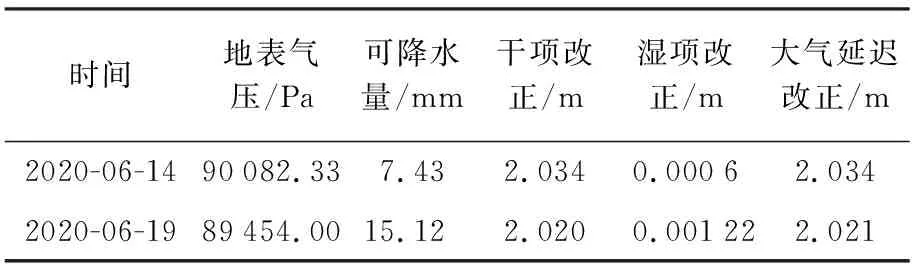
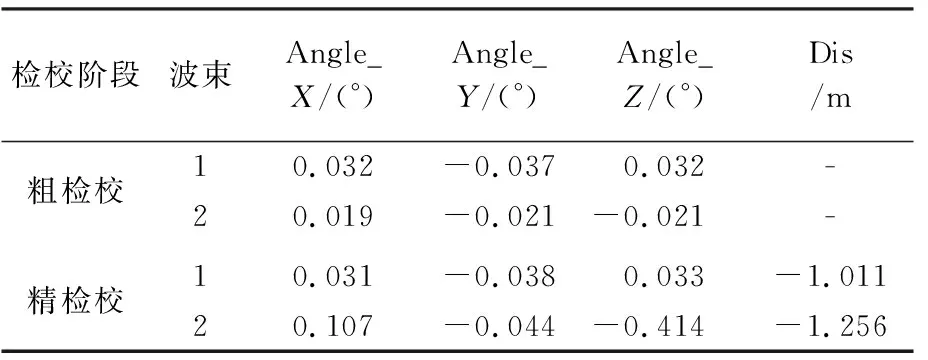
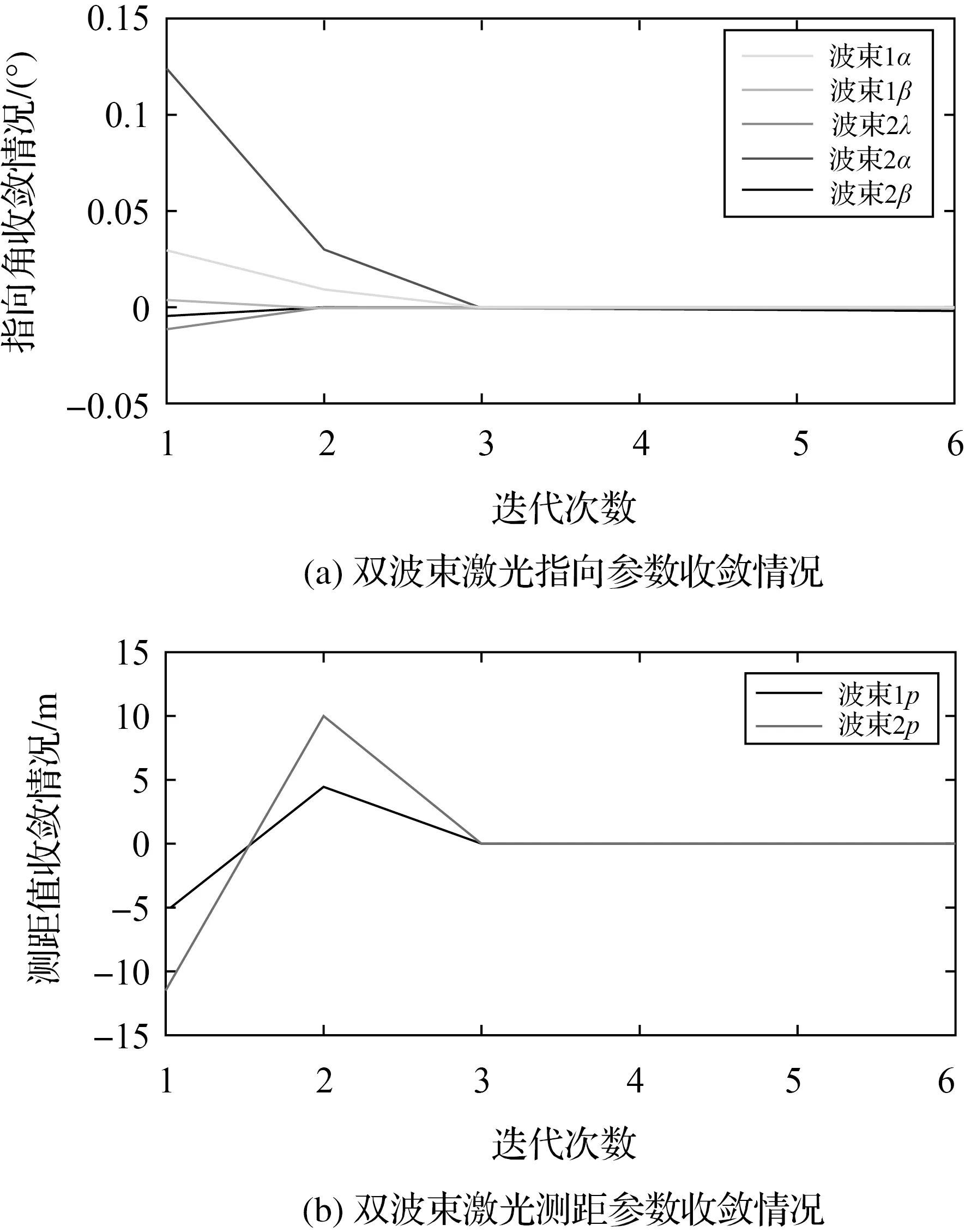
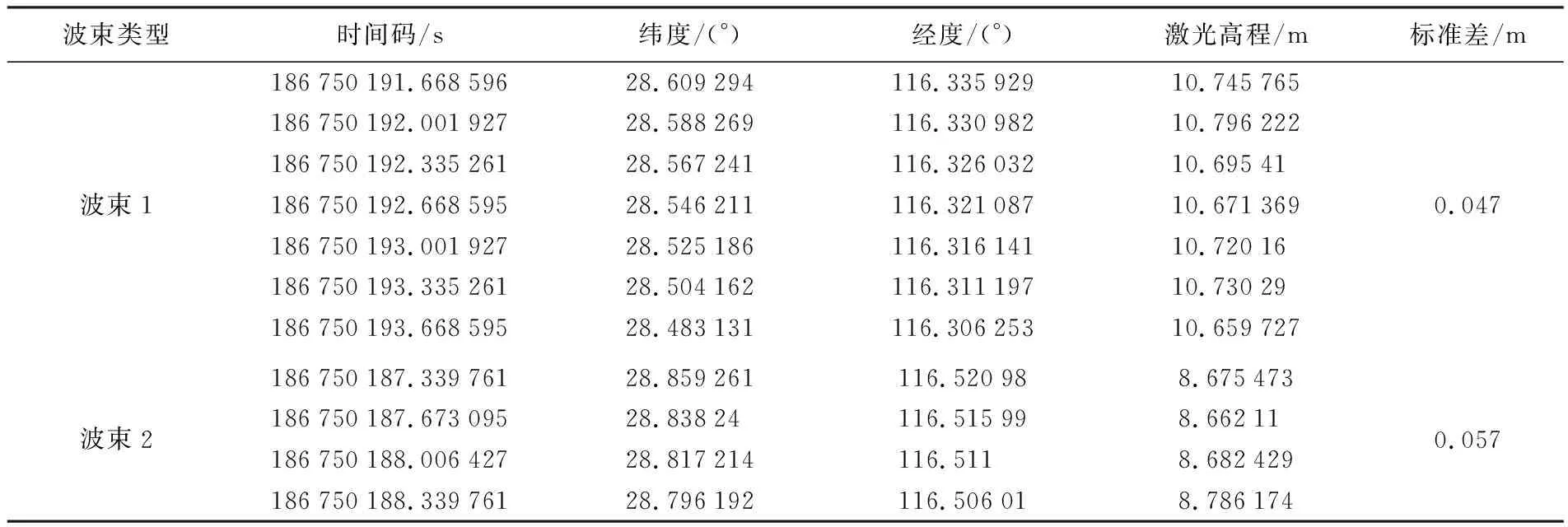
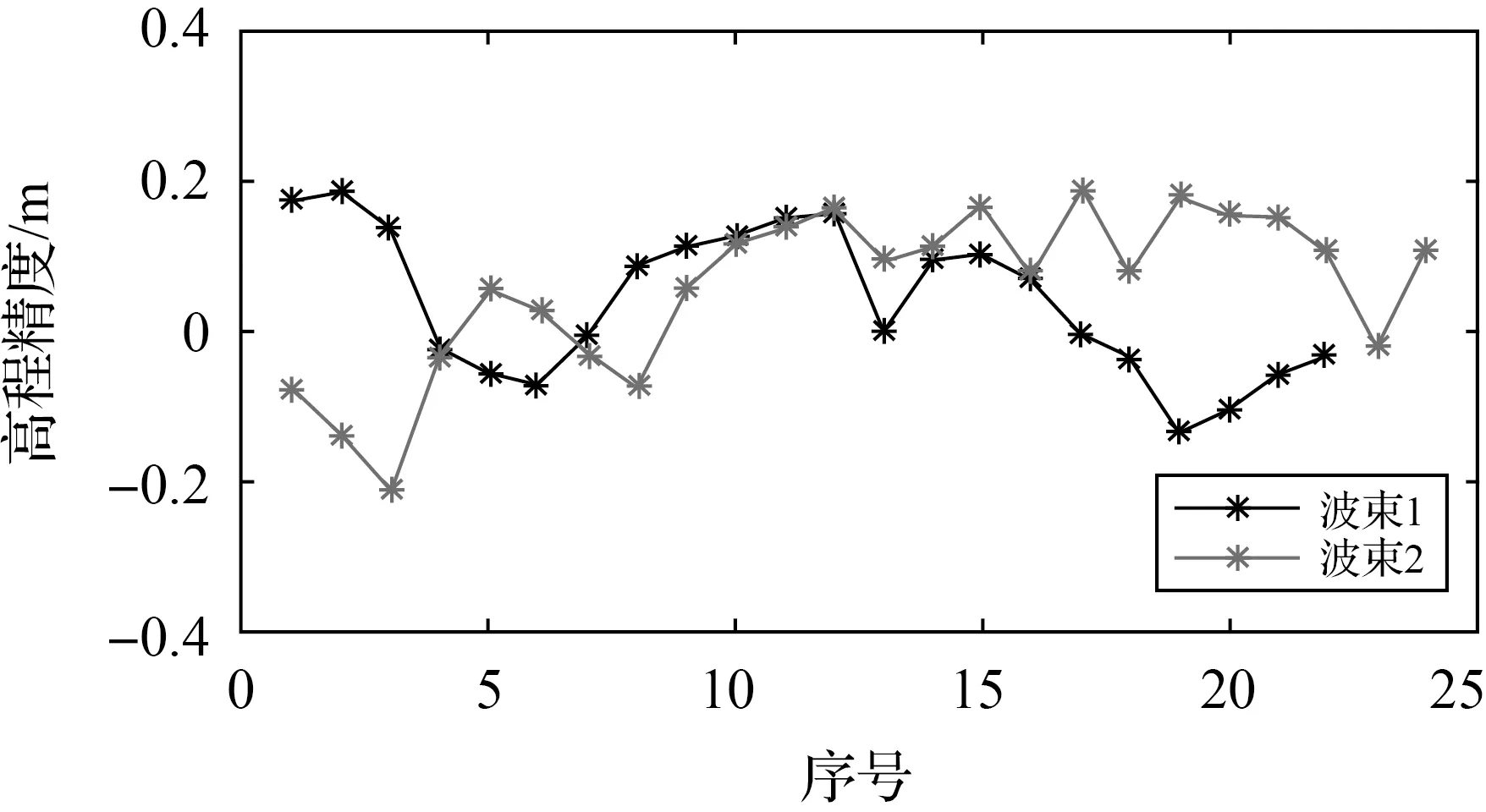
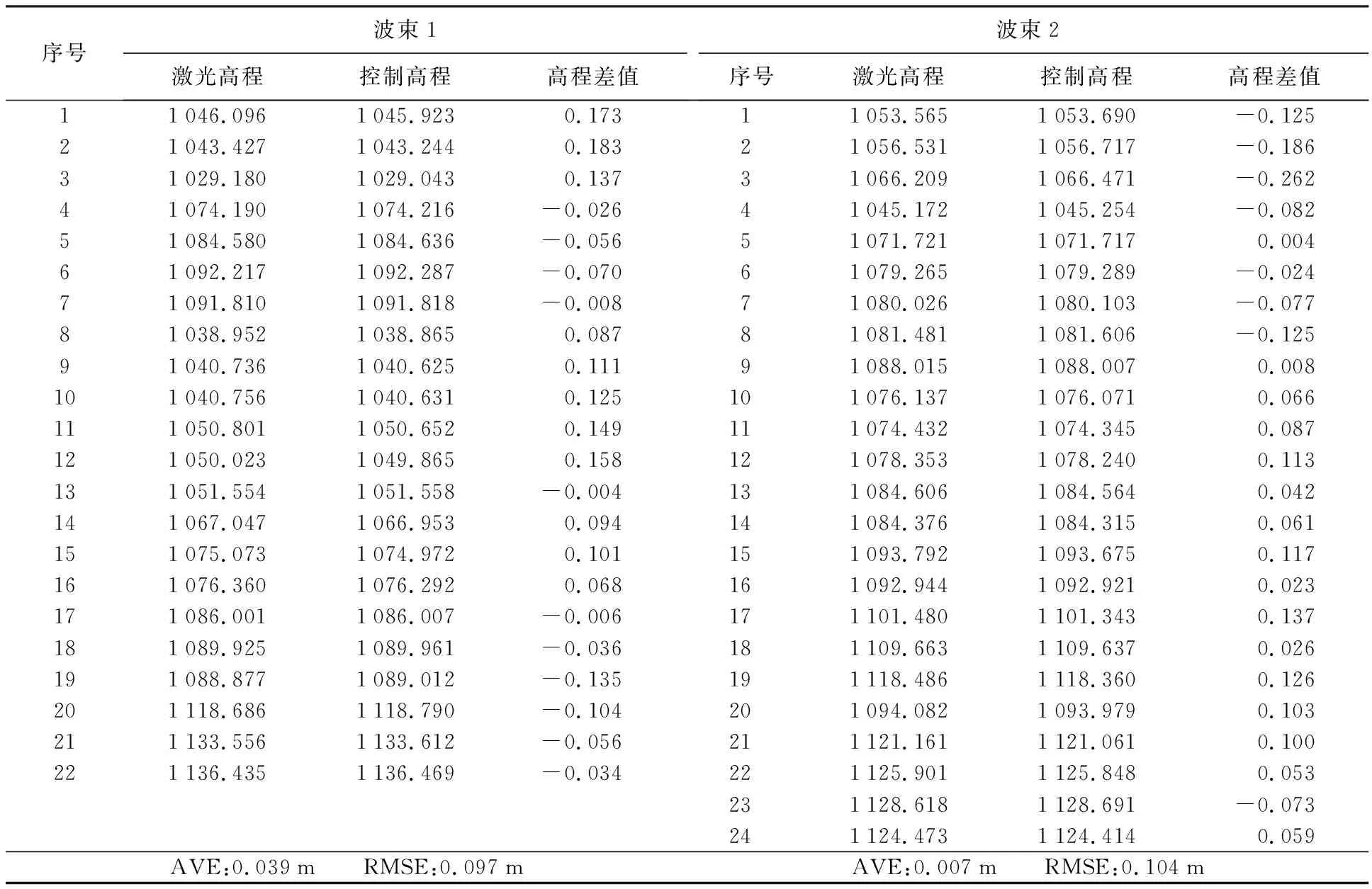
式中,hi为第i个地物至地面的高差,i=A,B,C,…,由实地外业测量获得;hwaveform为根据波形计算出的光斑内对应地表高差;Δhi(lati,loni)是第i个地物的高度与波形计算地物高度差值;(lati,loni)为第i个地物地面经纬度;当Δhi(lati,loni) 2.1.2 单波束激光检校模型构建 综合考虑卫星平台质心、激光器发射位置、GPS天线以及地球椭球面的相对位置偏移和旋转几何关系,构建单波束激光测高仪在轨几何检校模型,如式(2)所示 (ρ1-Δρatm-Δρtides-Δρ1) (2) 在单波束激光检校模型的基础上,引入双波束激光之间的相对旋转关系,构建双波束联合检校模型。以波束1激光检校模型为基准,构建波束2的观测方程,如式(3)所示 (3) 以双波束激光到地面光斑质心(XGCP1,YGCP1,ZGCP1)和(XGCP2,YGCP2,ZGCP2)的地面WGS 84坐标残差最小为原则,将式(2)和式(3)展开写成误差方程 (4) 以指向粗检校值为初值,利用同时捕获的双波束激光阵列数据,基于最小二乘原理整体求解双波束激光的指向和测距参数,确保检校参数满足全局最优。经过“两步法”激光在轨几何检校,可得到波束1的指向修正值Δα1和Δβ1,以及波束1的测距系统误差Δρ1;将得到的3个角元素r、a和b代入旋转矩阵ΔR中,经过计算可得到波束2的指向修正值Δα2和Δβ2,以及波束2的测距系统误差Δρ2。 实际工程中,为了便于计算,通常将指向投影到坐标轴的3个方向O-XYZ上,得到常用的三轴指向角参数(Angle_X,Angle_Y,Angle_Z),激光指向与三轴指向角参数转换关系原理示意如图4所示。两者的几何关系,可用式(5)表示 (5) 式中,arccos为反余弦函数。 基于“两步法”激光在轨几何检校方案,设计了高分七号卫星双波束激光测高仪在轨几何检校试验流程,如图5所示。粗检校旨在为精检校提供初步激光指向参数,提高在精检校中利用探测器捕获光斑的成功率。 图4 激光指向与三轴指向角参数关系Fig.4 Relationship between laser angle direction and three-axis angle (1) 粗检校:构建单波束激光检校模型,分析典型地物反射的特殊回波波形,估算对应的激光落点位置作为控制作为控制数据引入单波束激光在轨几何检校模型中,分别完成双波束激光参数粗检校,得到初步的激光指向参数。 (2) 精检校:根据场地需求,通过高精度激光足印位置预报方法[26],提前计算地面探测器阵列布设位置,在卫星过境后,捕获激光足印能量,获取被触发的激光地面探测器能量值和地面位置,利用能量质心提取算法计算激光检校地面控制数据,同步获取检校区域的大气延迟改正数据和潮汐改正数据,采用双波束激光在轨几何检校模型,实现激光系统误差参数高精度在轨几何检校。 (3) 精度验证:在平静湖面上验证测高数据的相对精度,在平坦地区验证测高数据的绝对精度。 图5 高分七号卫星双波束激光测高仪在轨几何检校试验流程Fig.5 Workflow of GF-7 double-beam laser altimetry on-orbit geometric calibration 3.1.1 试验数据获取 选取2019年11月13日第154轨过北京地区激光数据,挑选该轨数据中的典型地物双波峰波形。波束1激光数据时间码累计秒为:185 109 022,大致位置在北京顺义数码视讯产业园旁边小型林地边界上,如图6(a)—(c)所示;波束2激光数据时间码累计秒为:185 109 021.33。大致位置为北京顺义第十三小学体育楼边缘,如图6(d)—(f)所示。 图6 基于典型双波峰波形地物的地面数据获取Fig.6 Ground control data acquired by typical double-peak wave ground feature 根据波形提取的植被和建筑物高度,实地现场测量其高度最为接近的边缘点作为地面控制点。其中,波束1波形计算的林高为3.0 m,实测林高为2.9 m。综合考虑高七波形在垂直高度分辨能力,thred_h高差阈值设为0.1 m,通过RTK获取该位置地面坐标作为粗检校波束1地面控制。同理,波束2波形测得楼高18.0 m,实测楼高为18.0 m,通过RTK获取该位置地面坐标作为粗检校波束2地面控制。 3.1.2 试验结果 将获取的地面控制引入到高分七号卫星激光单波束在轨几何检校模型,解算两个波束指向角,得到激光指向初步优化结果。将原始指向和粗检校指向计算246轨激光测高产品,为了验证原始指向和粗检校指向的精度情况,如图7所示,2019年11月28日,委托黑龙江测绘地理信息局在黑龙江肇东地区利用RTK实测246轨激光测高产品对应地面高程信息(控制点高程精度优于5 cm)。 图7 利用RTK实测地面高程信息Fig.7 Ground control point measured by RTK 由于受当时天气以及环境影响,仅实测到波束2的22个检查点,计算原始指向和粗检校指向得到的高程差,结果如图8所示。 图8 粗检校前后高分七号波束2测高精度变化Fig.8 Elevation error of GF-7 beam 2 altimeter after calibration 试验结果表明,粗检校对高分七号激光测高精度提升明显,检校后激光波束2绝对精度达到0.49 m(1σ),验证了粗检校对指向精度的有效性。 3.2.1 激光足印位置预报 2020年6月4日至6月29日,在内蒙古自治区苏尼特右旗开展了6次高分七号卫星激光测高仪在轨几何检校试验,试验场址概略图如图9(a)所示,该区域地形平坦,多为草场。为了使地面探测器有效捕获激光能量,针对每次试验均开展了地面探测器布设位置多次迭代预报计算,6次试验预报点位分布图如图9(b)所示。 由于天气等各类因素,6月4日、9日和29日地面探测器未捕获到激光能量,6月14日两个探测器阵列捕获到激光能量,19日两个探测器阵列捕获到激光能量,24日1个探测器阵列捕获到激光能量,其预报精度如表2所示。 表2 激光足印位置预报精度 3.2.2 检校试验数据获取 激光地面探测器阵列布设现场如图10(a)和(b)所示,图10(c)至(e)为卫星过境时布设的不同型号的激光地面探测器。首次布设范围约为400×160 m(沿轨×垂轨),后期试验根据预报精度有所调整。为至少保证可触发9个地面有源探测器,首次布设间距为5 m。 图9 外业检校试验地面探测器布设位置预报Fig.9 the prediction site of ground detector in filed calibration 图10 激光探测器阵列布设Fig.10 Laser detector array 3.2.3 激光足印能量质心提取 在参数解算前,需要对探测器响应的激光足印能量阵列预处理,采用高斯曲面拟合法提取激光能量的中心,并计算其地面位置和高程。激光足印能量预处理结果如图11所示。 3.2.4 大气延迟改正参数同步观测和潮汐改正 试验期间现场同步开展了大气数据观测,以提供高精度的大气延迟激光测高改正值[27]。以试验区为中心,建立不同缓冲距离的缓冲区,根据站点分布情况,选取2°(约200 km)缓冲区内的气象数据进行处理,将缓冲区内站点实测气压与相对湿度采用样条函数插值法进行空间插值。 在试验区域2°范围内11个气象站点插值后,在11时与12时的气压分别为880.54 hPa与881.08 hPa,相对湿度分别为17.98%与27.80%。11点36分的插值气压为880.864 hPa,相对湿度为23.872%。采用2°范围的气象站点插值作为大气延迟改正参数计算输入,可得到如表3所示大气延迟改正参数。 图11 激光光斑能量分布三维图Fig.11 3D view of energy distribution in captured laser footprints 表3 大气延迟改正参数计算 3.2.5 双波束激光在轨几何检校 基于双波束激光测高仪在轨几何检校模型,利用地面探测器获取的激光足印能量质心位置,在大气延迟改正、潮汐值改正后,对激光检校参数进行整体迭代解算,双波束参数改正数迭代过程中残差变化如图12所示。可以看出,迭代3次即可收敛,验证了模型的稳健性。 高分七号双波束激光测高仪经过“两步法”在轨几何检校,得到的激光测高参数(三轴指向角参数Angle_X、Angle_Y、Angle_Z和测距系统误差Δρ)检校结果与设计值之间的差异如表4所示。 表4 激光测高参数检校前后差异 图12 双波束激光检校参数收敛结果Fig.12 Double-beam laser calibration parameter convergence result 3.3.1 相对测高精度验证 选取2019年12月2日高分七号卫星第446轨激光数据,该轨激光数据过我国南方鄱阳湖地区,考虑到冬季南方湖面较为平静,可用于验证激光测高仪高程相对精度。试验区域以及试验数据分布如图13所示。 图13 相对测高精度验证区域Fig.13 Schematic diagram of verification area of relative elevation accuracy 分别选取图13中位于湖面上的激光点,进行相对精度验证,其中波束1位于湖面共7个点,波束2共4个点。统计各波束测高标准差,结果如表5所示。 表5 鄱阳湖试验区激光测高相对精度验证 试验结果表明,经大气、潮汐等参数修正后,高分七号激光波束1相对测高精度优于0.05 m,波束2相对测高精度优于0.06 m,说明了高分七号激光测高数据稳定性较好。 3.3.2 绝对测高精度验证 外业检校期间,在非检校区域的平坦地形上(坡度小于2°,地表为平地且没有地物或植被覆盖),使用RTK采集了激光高程地面验证控制数据,标称精度优于0.05 m,实际优于0.02 m。波束1验证控制数据22个,波束2验证控制数据24个,与激光测量高程数据对比结果如表6所示。 综上可以看出,经过双波束激光在轨几何检校后,系统差抑制效果明显,波束1误差均值为0.039 m,中误差为0.097 m,波束2误差均值为0.007 m,中误差为0.104 m,控制点验证误差曲线如图14所示。 图14 激光测高数据绝对精度验证Fig.14 Absolute accuracy of GF-7 altimeter 表6 激光测高绝对精度验证 为了提高高分七号卫星激光测高精度,根据双波束测高仪的特点,设计了“两步法”激光在轨几何检校方案,有效提升了激光数据的高程精度,通过相对测高精度和绝对测高精度验证了所提方案的有效性和可靠性。总体上形成了以下结论: (1) 平静湖面验证试验表明:经过在轨几何检校,高分七号卫星激光测高精度稳定性较高,激光波束1相对测高精度优于0.05 m,激光波束1相对测高精度优于0.06 m。 (2) 平坦地区控制数据验证试验表明:经过在轨几何检校,高分七号卫星激光测高绝对精度优于设计值0.30 m,双波束激光绝对测高精度达到0.10 m。 (3) 本文设计方案可行,有效指导了高分七号卫星激光测高仪在轨几何检校,可为后续激光测高仪在轨几何检校提供技术参考。

2.2 基于地面探测器的双波束激光精检校


3 检校试验分析与验证
3.1 基于波形分析的单波束激光粗检校

3.2 基于地面探测器阵列的双波束激光联合精检校

3.3 高分七号双波束激光测高精度验证

4 结 论