一种攻角可调的双段翼仿生扑翼飞行器设计*
2021-03-22林镇炜王丽丽肖杰康黄明威
林镇炜,王丽丽,肖杰康,黄明威
(东莞理工学院 机械工程学院,广东 东莞 523000)
0 引 言
昆虫和鸟类等生物高超的飞行性能是自然界亿万年进化的结果,飞行效率是目前人造飞行器所无法与之比拟的。针对目前消费市场上的螺旋桨式无人飞行器普遍存在飞行效率低,续航时间短的短板且飞行噪音大,仿生扑翼式无人飞行器存在扑翼动作单一,攻角不可调节等问题研制一款飞行效率高,续航能力长,飞行姿态可调的新型扑翼式飞行器。
目前国内外在扑翼飞行器样机研制过程中大多采用模仿昆虫或小型鸟类的单段翼式扑翼结构,而这种结构形式在飞行器翼展尺寸增大时气动性能会显著恶化。因此,考虑到负载能力的要求,本团队选择秃鹫等大型鸟类作为研究对象研发一种可沿展向折叠的新型多段翼式仿鸟类扑翼飞行器。
目前研发的螺旋桨式飞行器(无人机)多用于侦察方面,该类无人机飞行时噪音轰鸣且外形易辨认,在警用侦察时极易引起犯罪嫌疑人警觉,在军用时则容易被敌方识别并击落,在续航方面,螺旋桨式无人机需要其螺旋桨高速转动提供升力才能滞空,滞空时间取决与电池电量和机身重量。笔者研究的双段翼仿生扑翼飞行器,仿照秃鹫的飞行方式,利用热气团上升带来的升力滞空从而长时间对地面进行侦察,且设计的外形伪装为鸟类,不易被敌方识别。外观可漆成各种大型鸟类,加上其仿生性的扑动飞行方式,该扑翼飞行器亦可应用在大型演艺演出上。
1 动力电路及控制系统设计
双段翼仿生扑翼飞行器主体设计由动力电路及控制系统,两段扑翼运动机构,圆柱直齿轮传动机构,尾舵控制机构等组成,骨架上覆EPP泡沫,并可涂装鸟类外形。
1.1 选型确定
参考其他文献并结合以往设计经验,依据实际需求调整后,初步决定以下选型:
动力电路部分中,电源选用eoWER-3S25C航模电池,额定电压11.1 V,质量165 g,原动机选用A2212/10T-1400无刷电机,kV值为1400,(即供电电压为10 V时,转速为14 000 r/min),质量51 g。电子调速器(后简称电调)选择与无刷电机适配的Skywaler15A,质量为17 g。信号发射器与信号接收器为同一套产品,品牌型号Radiomaster TX16S,质量为392 g,可实现对扑翼机器人的无线遥控。
控制电路部分中,集成电路芯片选用的是品牌型号为STC89C52的单片机芯片(后简称51单片机),质量约15 g,舵机选用MG90S小型舵机,质量为13 g。各传感器类选型的基本要求是质量轻巧,具体性能不再赘述。
1.2 电路控制原理
如图1电路控制原理图所示,11.1V航模锂电池电源直接给电子调速器供电同时连接上变压模块以便输出5V电路,另一端接入低压保护器。电子调速器接受11.1V电源后将其转化为三相正弦波电流以驱动无刷电机,无刷电机转速此时取决于其输出的三相正弦波电流的频率大小。电子调速器由5 V电路供电以维持正常工作,受由信号接收器引出的信号线发送持续的电信号以调节输出电流的频率与功率,控制无刷电机的实时转速。

图1 电路控制原理图
无线信号发射器为操作端,推动油门杆方向杆等操作杆,其上无线电波信号发送至信号接收器,信号接收器把接受到的无线电波信号转化为电信号由一条信号线引至电调控制无刷电机转速,另外两条信号线引致51单片机,单片机实时处理信号而发送电信号控制舵机组1和舵机组2,控制扑翼仿生鸟的飞行姿态和转向。姿态传感器实时读取扑翼仿生鸟的飞行角度速度等将数据传回单片机,单片机根据扑翼仿生鸟的当前飞行姿态控制舵机组3而调整飞行攻角。温湿度传感器和摄像头将控制收集到的温湿度数据和所拍摄到的图片返回单片机从而采集空中数据进行空中侦察。摄像头以数据线与单片机连接,数据线中已包含供电线。
2 双段翼扑动仿生机构设计部分
2.1 双段翼式鸟类扑翼运动分析
此次研究的仿生鸟主要以秃鹫为仿生对象,经过研究,秃鹫的飞行是相对节省能量。白天太阳照耀在大地上,而地面上由于地形、植被的不同,受热并不均匀,有些地方更容易受热,那些地方空气的温度上升也比较快,热空气比冷空气轻,就会形成一股空气柱慢慢地上升。在这股空气柱的底部会受到冷空气向上兜的力,结果,热空气就成了一团向上翻滚的大气泡。我们可以把它想象成蘑菇云,但肉眼却看不到。秃鹫可以凭着它们特有的感觉捕捉到这种自然的力量。它们钻进上升的气泡中,在气泡的顶部盘旋,依靠气泡上升的力量,它们可以爬升到500~1 000 m的高空。作为一种食腐动物,秃鹫会在空中长时间观察地面目标以确定其是否已死亡,这种超长时间的滞空能力和超强观察力是文中研究扑翼仿生鸟的目标。
秃鹫以及大部分大型猛禽类的翼翅可分作内翼和外翼两部分,因此称大型鸟类的翅膀为两段翼,研究分析大型鸟类中,秃鹫的扑翼动作后发现,秃鹫的翅膀扑动动作大致可分为两个阶段,为下扑阶段和上扑阶段。
图2所示为由知网文献搜集的大型猛禽类的飞行扑翼动作,其中1~7的运动过程为下扑阶段,此阶段是大型猛禽鸟类扑动飞行产生升力和前进推动力的主要阶段,该阶段所需时间最长,在开始准备下扑时,鸟类的翅膀会完全舒展开来,使其翅膀的受力面积达到最大,以便在整个下扑过程中获得最大的推力和升力;8~14过程为上扑阶段,当翅膀下扑到最低点并停留一段时间后,其外翼部分会开始下垂,同时其內翼部分开始向上回转,翅膀呈拱起的状态,尽量减小其翅膀受力面积,以降低阻力的作用,当内翼回转到最高点是,外翼开始向上扬起,再次使其翅膀受力面积伸展到最大,准备开始下扑,如此反复运动,从而为飞行提供动力。
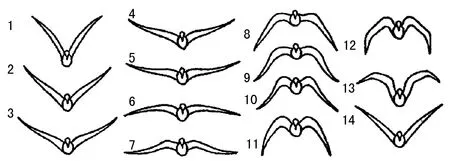
图2 大型鸟类扑翼运动分析图
查阅各方文献中搜集得表1数据,供后文扑翼机构的设计参数参考。

表1 秃鹫仿生设计相关参数
2.2 扑翼机构的设计计算
研究的飞行器扑动机构选用双曲柄摇杆机构初步估算仿生扑翼飞行器的总质量为300 g机构原理图如图3。

图3 仿生扑动机构原理图
其中O点与D点为机架,OA为曲柄,AC为连杆,CE为摇杆,它们构成了內翼部分,而杆BF和杆FEG构成了外翼部分。当曲柄OA与连杆AC拉成直线时,摇杆CE的摇摆幅度达到下极限值。由以往设计经验,初步取LCE=LBF=0.27 m,LBC=LEF=0.015 m,D=0.1 m。
则:
LEG=L-LCE-D/2=0.68 m
(1)
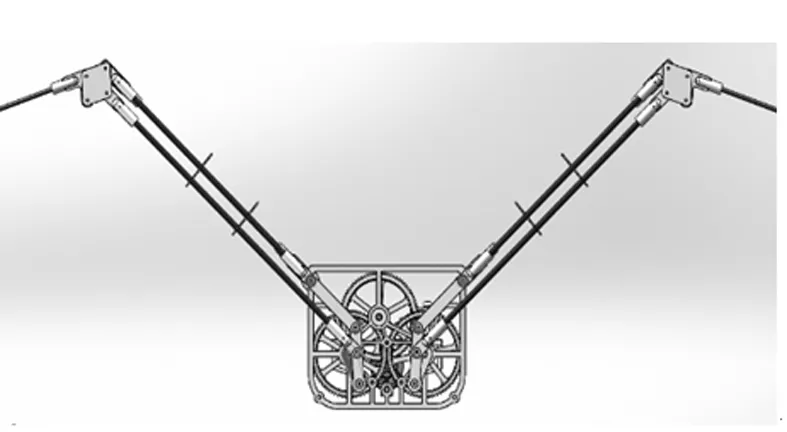
图4 机构三维建模图
2.3 圆柱直齿轮减速传动机构
原动机转速计算如下:
n=1 400×11.1=15 540 r/min
(2)
设计机构的扑动频率为60 Hz,则:
(3)
渐开线圆柱齿轮传动比为3~5 因此应采用三级减速机构。初步分配传动比:
i1=4.76
(4)
i2=3.80
(5)
i3=2.38
(6)
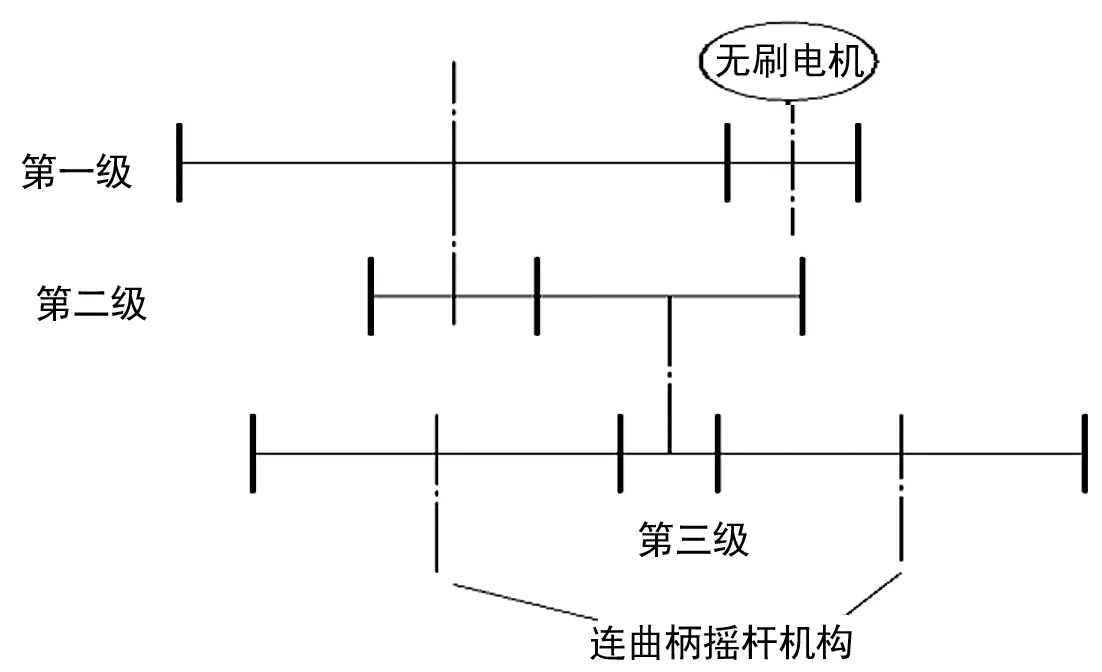
图5 齿轮装配布置简图
2.3.1 选定第一级齿轮类型、材料及齿数
齿轮设计基本公式有:
Z1×i1=Z2
(7)
d=mz
(8)
确定齿轮类型:两齿轮均为标准直齿圆柱齿轮,8级精度。材料选择上,考虑高速级应力循环次数最大,因此选用拥有优秀比强度的金属材料齿轮材料选用闭式软齿面。小齿轮材料为优质碳素钢45,调质处理,硬度取值为250HBS;大齿轮材料为21spc尼龙材料,硬度取值为30HBS。
原动机输出轴径3.17 mm,为节省几何空间以及减轻结构重量,以电机轴直接作为输入轴而不用联轴器连轴结构。由于原动机输出轴无法制成齿轮轴。故小齿轮分度圆直径至少为:
d1=3.17×4=12.68 mm
(9)
将d1圆整为13 mm,若取模数为1 mm则齿数为13,不满足最低齿数17,因此采用非常用模数0.8 mm,取小齿轮齿数为17,则由式(7)、(8)得:
Z2=Z1×i1=17×4.76=80
(10)
d2=Z2×0.8=64 mm
(11)
2.3.2 选定第二级齿轮类型、材料及齿数
两齿轮均为标准直齿圆柱齿轮,8级精度。为减轻飞行器的重量,小齿轮材料为21spc尼龙材料,硬度取值为30HBS。大齿轮材料为21spc尼龙材料,硬度取值为30HBS。经过一级减速后,传递转速减慢而传递扭矩增大,故应采取更大的模数和,而分度圆则可以适当减少,即齿数减少,为保证传动平稳,齿数17已为极限少齿数,故各小齿轮齿数Z1、Z3、Z5都只能选择为17,即Z3=17。
初步选定模数为1 mm,则由式(7)、(8)得:
d3=1×17=17 mm
(12)
Z4=Z3×i2=64
(13)
d4=1×64 mm
(14)
2.3.3 选定第三级齿轮类型、材料及齿数
该齿轮副中,为低速级齿轮传动,有两个对称布置的大齿轮,大齿轮上连接曲柄摇杆机构,为保证两翅扑动对称,齿轮选6级精度,材料均选用POM4520尼龙 齿面硬度30HBS。Z5=17,由于几何结构限制仍取模数1 mm,该级传递扭矩较大,故应适当加大齿宽。由式(7)、(8)得:
d5=1×17=17 mm
(15)
Z6=Z5×i3=64
(16)
2.3.4 传动比相对误差校核
由2.3.1~2.3.3可制得表2,表3所列。

表2 高速级齿轮设计结论

表3 低速级齿轮设计结论
计算总传动比i′以及整机传动比相对误差:
i′=(Z2/Z1)×(Z4/Z3)×(Z6/Z5)=41.68
(17)
Δ=(i′-i)/I=3.4%
(18)
减速比误差小于5%,故符合工程要求。
3 扑翼机器人骨架及其控制
3.1 整机骨架部分
碳纤维材料由于其轻便结实,常用于航模等的制作材料。因此整机选用比强度很高的碳纤维管/棒以及碳纤维板制成,整体机身骨架建模示意图如图6、7,两图中,整体呈翼状的为机器的曲柄摇杆扑翼机构;成“Y”状的为尾舵机构;中间为齿轮减速机构,齿轮箱板支撑由碳纤维板加尼龙螺柱组成并镂空处理,由直径3 mm的碳纤维棒作主支撑贯穿整个机器。扑翼机构上流线片状为翼片支撑构件,支撑其上覆盖的EPP泡沫。

图6 机身骨架俯视图 图7 机身骨架轴测视图
3.2 尾舵控制部分
如图8,尾部设计通过两个舵机连接连杆机构,连杆两端带鱼眼轴承提供额外自由度,通过舵机组中两个舵机配合运动,可实现尾部的上下左右运动。
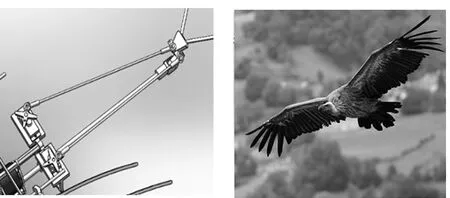
图8 设计的尾部骨架 图9 秃鹫的尾部图
如图9,仿照秃鹫的尾部,覆盖EPP泡沫制成扇形尾舵图10。

图10 尾部实物图 图11 扑翼机构尾端
3.3 攻角控制部分
曲柄摇杆扑翼机构末端装有舵机,如图11,可控制流线片状翼片小幅度转向,在飞行过程中,51单片机接受从各传感器返回的数据而做出实时判断,发出控制指令实时控制该舵机组,从而实时调整飞行攻角获得更佳的升力。
4 结 语
研究了一种仿生动物飞行新概念的飞行器---特种机器人扑翼飞行器。文中基于项目科研工作开展并结合机械仿生设计学完成了一种攻角可调的仿生飞行扑翼鸟的电路控制等设计。利用文中原理可制得扑翼飞行器原动机。文中制作计算主要依据经验公式,所得仅为近似值,受限于实验条件没有进行流体力学分析。在设计计算精度、外形流体分析,以及重心控制方面有待进一步改善。此次是对仿生扑翼机器人的基础研究,需进一步加深,希望对仿生扑翼飞行机器人的相关研究及此类机器人的成熟化与产品化过程能起到一定的参考作用。