基于随机参数模型的平面信控交叉口非机动车左转设施安全分析
2021-03-19杨晓春韦凌翔廖明军罗小萌唐辰佳
杨晓春,韦凌翔,廖明军 ,罗小萌,唐辰佳
(1.盐城工学院保卫处,江苏 盐城 224051;2.盐城工学院 材料科学与工程学院,江苏 盐城 224051;3.道路灾变防治及交通安全教育部工程研究中心 湖南 长沙 410076)
非机动车作为符合我国国情并拥有广泛群众基础的代步工具,在现阶段具有不可替代性[1]。由于其具有轻便、灵巧、价格低、能耗少等特点,越来越受到普通居民的欢迎,因此使用非机动车的群体急剧膨胀[2]。以前的非机动车主要是指人力自行车,随着近年来科学技术的发展,电动自行车也成为了非机动车组成中不可或缺的部分。电动自行车是指以蓄电池作为辅助能源,在普通自行车的基础上安装了电机、控制器、蓄电池、转把等操纵部件和显示仪表系统的机电一体化的个人交通工具[3]。目前,电动自行车在短距离出行占据的比例越来越高,尤其是在南方二三线城市,占比甚至高达0.9,以其能耗低、无污染以及在城市道路上灵活方便的特点,成为广大市民的出行首选。在城市平面信控交叉口中,非机动车抢行、侵占机动车行驶空间的行为是降低城市路网通行能力、诱发交通事故的重要致因,对城市道路的通行安全构成威胁[4]。其中,非机动车在城市平面信控交叉口左转的过程中,具有车流分散性强、行车曲线不规则、与左转机动车近距离行驶等特点,所以非机动车左转驾驶违法行为是引发城市平面信控交叉口非机动车交通事故的关键成因之一。对城市平面信控交叉口非机动车左转安全机理进行深入分析,可以为日后交叉口左转交通设施的改善、非机动车等弱势群体出行以及降低交通事故提供一定的理论依据和数据支撑。因此,对城市平面信控交叉口的非机动车左转设施进行安全分析具有重要意义。
目前国内外针对非机动车左转驾驶行为的研究多从非机动车的基本行车特性和与机动车的冲突入手,其具体成果包括:邵春福等[5]研究左转非机动车二次过街对信号交叉口运行效率的影响,建立了非机动车影响下的机动车通行能力模型,分析了左转非机动车平均延误;刘轼介[6]在论述非机动车在交叉口处左转组织形式的基础上,针对比较典型的非机动车与机动车同相位直接左转的形式,建立了机动车运行轨迹间最短距离模型;杨晓光等[7]分析了行人−非机动车与左转机动车的冲突特征,改进了许可相位条件下左转机动车的行人−非机动车修正系数计算模型。综上所述,目前对左转非机动车交通冲突问题的关注相对有限,并且多是从事故特性等角度进行分析[8−9],对左转非机动车可能产生的交通冲突没有全面考虑非机动车左转交通设施对左转非机动车驾驶安全的影响。
基于此,本文将通过构建信号交叉口左转交通冲突模型,定量分析左转车速、左转交通量、左转导行线、左转间距、中心圈和交通冲突的关系,对影响信号交叉口非机动车左转安全的显著性设施因素进行分析,分析结论为提高城市信号交叉口左转非机动车的驾驶安全和改善左转安全设施提供了较为科学可靠的理论和数据支撑。
1 平面信控交叉口左转非机动车通行空间确定与数据采集方法设计
1.1 平面信控交叉口左转非机动车通行空间确定
目前国内大部分的信控交叉口都设置了专门的左转信号相位。依据《城市道路标志标线设置指南》(GB51038—2015)等规范,确定本文研究交叉口左转非机动车通行空间图布局如图1 所示。
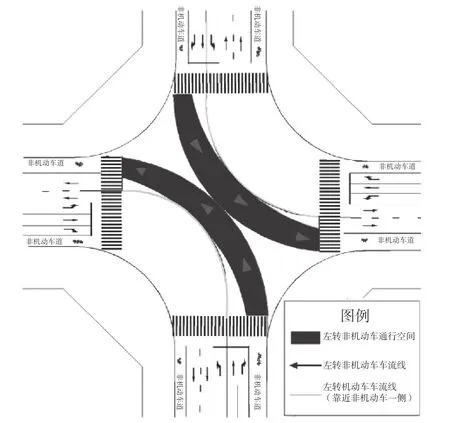
图1 非机动车左转通行空间图
1.2 平面信控交叉口非机动车左转数据采集方案设计
本文选择开放大道与建军路、建军路与文港路、大庆路与文港路等5 个有左转专用相位交叉口作为研究对象,采用录像调查法调查选定交叉口东西南北4 个出口道方向,采集左转非机动车的相关数据。选定交叉口物理属性为:左转专用相位的绿灯时间(东西/南北方向)均为30 s、非机动车车道宽度(进口道/出口道)均为5 m、均有机非分离带、均有机动车左转待转区。选择上述类似的交叉口可以避免避让行为因交通设计的不同而受影响。
1.3 平面信控交叉口左转非机动车位置提取方法
通过Adobe After Effects 软件每隔1s 截取视频画面,再利用photoshop 的透视网格工具根据该交叉口的几何特性,选定非机动车停车延长线相交的4 个交点,从而确定视频中交叉口符合的透视平面,对视频进行符合路面透视的网格坐标预处理。以人工观测的方式依次读取每一秒的非机动车在网格中所对应的x-y坐标。具体坐标读取示意图如图2 所示。
交通冲突的判别采用避让行为:在非机动车左转的过程中,两车若有发生碰撞的可能,即若其中一辆车采取了停车、转向或者是明显减速等行为时,记为1 次避让行为。

图2 坐标转换图
2 基于随机参数的交通冲突模型
2.1 模型的建立
由于在不同的交通状态和车辆运行情况下,信号交叉口发生交通冲突的概率不同,因此在建立交通冲突模型的过程中,一方面要全面考虑不同交通流状态的影响,另一方面要考虑不同交通流状态间相互关联的情况。因此,本文提出了一种新的随机变量参数模型,其中假设变量系数服从某一种分布,而不是某一定值,可以很好地解决因变量的变化而产生不同作用效果的问题。
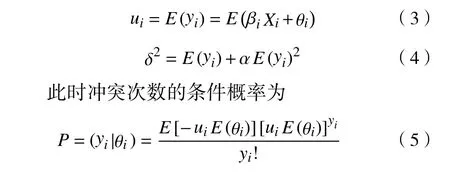
为了更透彻地解释建模过程,先从最基本的泊松模型开始推导。泊松模型的概率函数为

式中:i为观测的样本;n为 样本的数量;yi为单位时间内产生的冲突次数;P(yi)为在单位时间内产生yi次冲突的概率;ui为 在单位时间内产生的期望冲突次数。
又因为ui是 冲突影响因素的函数,所以

式中:E(.)为期望函数;Xi是观测样本为i的冲突影响因素的向量;βi为参数Xi的系数矩阵。
泊松模型的前提是交通冲突数据的均值等于方差,但由于交通冲突数据的离散性强,即均值不等于方差。如果不加以改进的话会导致模型失真,所以假设泊松分布允许冲突的均值和方差不相等,会产生误差项 θi和离散系数 α,则原影响因素函数的数学期望和方差可以表达成:
因为泊松分布模型是固定参数模型,所以在模型中假设影响交通冲突的因素在任何时候产生的影响都是相同的,但实际上由于驾驶人员和驾驶条件的不同,显然这种统计模型会产生一定的偏差。如果要解决这一偏差就需要在原模型中加入1 个随机变量,以此来消除偏差。假设 βi为泊松分布模型系数向量β中的第i项,在模型系数中加入一个随机变量,以此来消除因影响因素时刻发生变化而产生的偏差,即

式中:ηj为左转交通设施j所引起的误差项随机变量,且误差项随机变量服从正态分布;βij为引入误差项随机变量ηj后Xi的系数。
所以,在考虑了随机参数后泊松分布模型冲突数的数学期望值为

式 中:βi j为考虑了模型误差项后新的系数向量。
2.2 模型标定
通过构建似然函数拟合模型,利用左转设施冲突数据来核定泊松模型实际状态的模拟能力,则随机参数模型的对数似然函数为

式中:L为似然函数;为误差项随机变量 ηj的概率密度函数,且服从均值为0、方差为 δj的正态分布;为交通冲突数yi的条件概率函数。
利用非机动车左转交通设施的设计要素、交通流参数及交通冲突数据,运用极大似然估计法可得模型参数 βij及其分布函数。参数估计时采用低差异序列的Halton 抽取模拟技术[10 − 11]来抽取参数估计值。
2.3 模型验证
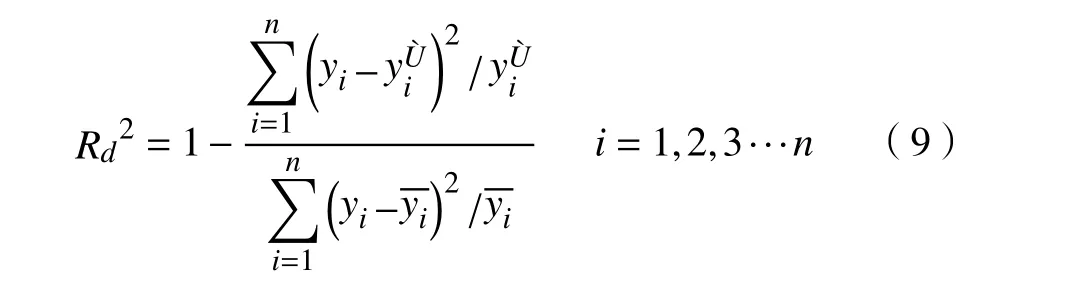
式中:yi为第i个单位时间内的实际冲突次数;为平均实际冲突次数;为第i个单位时间内的预测冲 突次数。
3 结果分析
3.1 模型估计结果
本文采用卡方检验来检查交通冲突的分布,以4 min 作为一个时间段统计冲突数,建立随机参数泊松分布模型和固定参数泊松分布模型对冲突数据进行具体分析,具体分析结果见表1。
从模型的估计结果上看,当模型收敛时随机参数模型的对数似然函数拟合模型的拟合值(−1 286.330)大于固定参数模型的对数似然函数拟合模型的拟合值(−1 864.300),拟合结果表明随机参数模型比固定参数模型的拟合效果更好。此外,随机参数模型的值大于固定参数模型的对应值,再次证明了随机参数模型具有更好的拟合效果。表1 列出了交通冲突数的显著性影响因素的估计系数和P值。P值为所得到的样本观察结果有效或更极端结果出现的机率,当P值小于0.05 时,表明该变量对因变量的影响效果是显著的。

表1 随机参数泊松模型与固定参数泊松模型估计结果
3.2 影响因素
3.2.1 交通流因素
从模型的结果可以得出,左转非机动车交通量与左转交通冲突数呈现出显著的正相关性。系数分析结果表明当左转非机动车交通量每增加1%,相应的左转交通冲突数就增加0.630%,交通冲突次数随着左转交通量的增大而增加。通过视频观察提取到以下信息:1) 整体上看,左转对向行驶非机动车存在避让行为,其避让次数统计范围取值为0 至6 次;2) 随着单位时间内非机动车交通量的增加,左转对向行驶非机动车的避让次数呈现出递增趋势,具体避让行为个数与左转非机动车交通量关系如图3 所示。由于大量左转车辆集中在一定的左转区域,导致交通冲突概率增加,所以交通冲 突数与左转交通量呈现正相关性。

图3 左转对向行驶非机动车避让行为分布图
3.2.2 道路因素
通过模型结果可以看出:中心圈与交通冲突呈现出显著关系,且中心圈的估计系数为负,说明中心圈可以显著降低交通冲突,弹性系数表明设置中心圈可以使得道路上的交通冲突降低28.300%。通过视频观察发现,由于道路中间存在中心圈,使得非机车动驾驶员在左转过程中可以准确地找到合理的驾驶路线,从而减少交通冲突。除此之外,由于中心圈不可压,使得一些“激进”的驾驶员主动放弃超车的机会,从而使交通冲突进一步减少。
左转导行线与交通冲突呈现出显著关系,左转导行线的估计系数为负,说明左转导行线可以显著降低交通冲突,弹性系数表明设置左转导行线可以使得道路上的交通冲突降低36.350%。通过Adobe After Effects 软件在视频中设置虚拟机动车导行线,统计左转机动车不同V/C 下左转非机动车越过导行线的车辆数如图4 和图5 所示。通过对图4和图5 分析得出:1) 在左转机动车饱和度(V/C)不变情况下,随着左转非机动车数量增加,非机动车越线数基本呈现线性增长趋势,此外左转机动车的饱和度(V/C)越大,左转非机动车越线数越少;2) 当左转非机动车流量大于10 辆/每信号周期时,左转机动车饱和度(V/C)越小,非机动车越线比例越高。一些非机动车驾驶员趁机侵占机动车左转车道,从而增加非机动车和机动车之间的冲突。
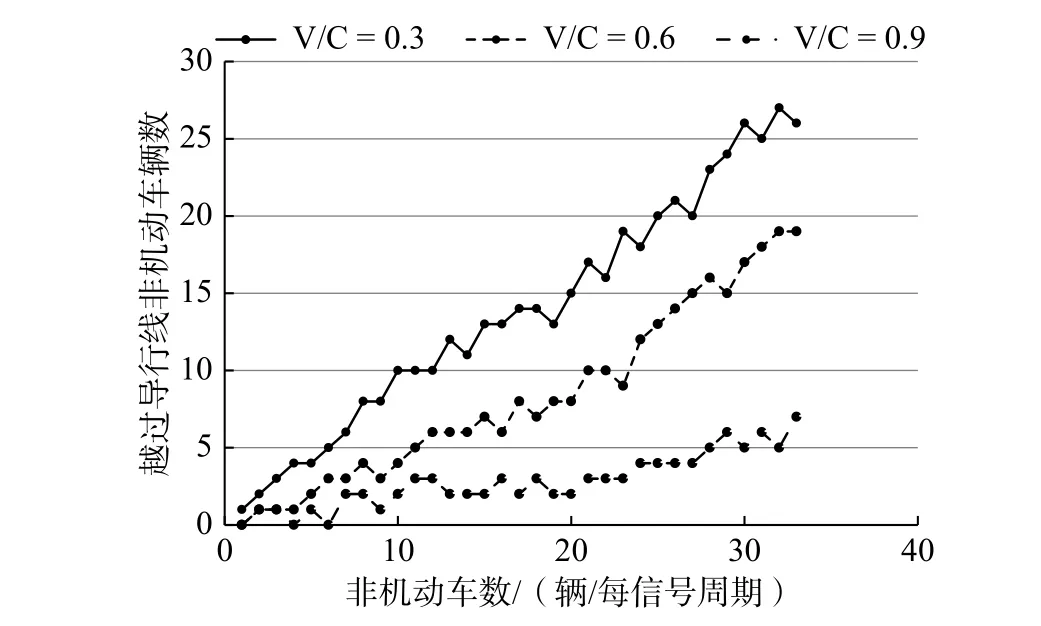
图4 不同V/C 下左转非机动车越过导行线统计图

图5 不同V/C 下左转非机动车越过导行线比例
3.2.3 驾驶因素
左转间距和交通冲突数之间存在着显著的影响关系。由于左转间距的系数为负值,表明当非机动车的左转间距越大时,交通冲突数越显著减少。弹性系数表明左转非机动车之间的左转间距增加1 m,交通冲突数会相应地减少25.560%。通过视频观察左转同向并行间的非机动车横向间距分布情况可以得出:1) 加速阶段,非机动车横向间距分布在[−2.5 m,2.5 m]之间的约占84%;2)匀速阶段,非机动车的横向间距分布在[−2.5 m,2.5 m]之间的约占71%;3)减速阶段,非机动车横向间距分布在[−2.5 m,2.5 m]之间的约占64%。这表明非机动车沿其左转行驶方向呈逐步膨胀特性,因此应根据其驾驶特性来设计左转驾驶道路,即出口道宽度要大于进口道宽度。
左转车速与交通冲突呈显著正相关。在其他因素保持不变的前提下,左转车速增加1%,交通冲突增加0.520%。车速过快导致交通冲突显著增加,因此限制左转车速可以提高交叉口交通安全水平。
4 结论
1)建立随机参数模型,对平面信控交叉口非机动车左转设施的安全影响因素进行分析,其模型估计结果表明,随机参数模型的拟合结果要明显优于固定参数随机模型。
2)非机动车在左转过程中呈现较为明显分散特性和沿其左转行驶方向逐步膨胀特性。这样需要交叉口满足非机动车出口道的宽度大于非机动车进口道的宽度,只有按非机动车逐步膨胀的特性来设计非机动车左转设施,才能减少非机动车之间的冲突。
3)在左转机动车饱和度(V/C)不变情况下,随着左转非机动车数量增加,非机动车越线数基本呈现线性增长趋势;当左转非机动车车流量大于10 辆/每信号周期时,左转机动车饱和度(V/C)越小,非机动车越线比例越高。因此,设置机动车的左转导行线,能够有效减少左转非机动车与左转机动车之间冲突的可能性,从而避免冲突事故的发生,提高左转非机动车的安全性。
4)左转对向行驶非机动车存在避让行为,随着单位时间非机动车流量增加,左转对向行驶非机动车避让次数呈递增趋势。这样会增加左转非机动车的潜在危险性,不同进口道的非机动车进行空间分离能够有效减少危险性。
5)本文在确定平面信控交叉口左转非机动车通行空间基础上,较为系统地分析了平面信控交叉口左转非机动车的左转车速、左转交通量、左转横向间距、中心圈、机动车的左转导行线和交通冲突之间的关系。分析结论对改善城市信控交叉口左转非机动车驾驶安全特性提供了较为科学可靠的理论和数据支撑。
