基于模糊PID 的电控精量播种系统与试验研究
2021-03-18赵晓顺赵达卫胡雨裳于华丽于凤超
赵晓顺,赵达卫,闫 青,胡雨裳,于华丽,于凤超
(河北农业大学 机电工程学院,河北 保定 071001)
智能化精量播种技术是未来精准农业发展的必然趋势[1-2],但目前国内播种机的核心部件—排种器仍然是由地轮驱动的传统机械形式,由于田间作业环境复杂,地轮会频繁打滑[3-7],导致播种均匀性下降。电控播种系统由电机驱动排种器,不仅可以提高播种均匀性,而且符合播种机械装备轻量化发展的趋势。张春岭等[8]研究了使用PWM 调速方式和基于遗传算法的PID 参数整定对直流无刷电机的控制实现;丁友强等[9-10]设计了基于PID 控制算法和GPS 测速的玉米播种机电控系统;何洁等[11]运用PID 速度控制算法和联合导航技术,设计了插秧机自动作业系统;丁幼春等[12]设计了1 种油菜播种机导航控制器,该控制器基于免疫PID 控制算法,使用北斗定位系统和电子罗盘,实现对油菜播种机的导航控制;杨硕等[13]设计了1 种基于分段PID 控制方法的电动排种系统,该系统使用CAN 总线通讯的方式实现系统信号传输;付卫强等[14]在玉米播种单体上设计了1 套由仿形机构、液压系统和电控系统组成的播深控制系统;程修沛等[15]设计了基于STM32 单片机的小麦小区播种电控系统,系统可由作业人员设定小区播种作业参数,通过控制步进电机和直流电机,实现对椎体格盘和分种器转速的控制。总之,国内学者针对PID 控制算法与电控播种系统的研究比较广泛[16-21],但电控播种系统均用于玉米、小麦等单一作物播种,且控制精度和稳定性有待进一步提高。
针对上述问题,设计了基于模糊PID 控制的精播和条播双模式电控播种系统,以进一步提升播种均匀性和播种质量,提高系统利用率。
1 系统结构和工作原理
电控播种系统主要由STC89C52RC 单片机、直流无刷电机、电机驱动器、旋转编码器和LCD 显示屏等构成,如图1 所示。在播种作业过程中,用户设定播种作业参数,系统通过安装在测速轮上的旋转编码器实时检测播种作业速度和电机转速,由单片机计算得出电机理论转速,并向电机驱动器发出一定频率PWM 信号驱动电机运行,在此过程中通过模糊PID 控制算法将电机转速与理论转速进行对比,并调节PWM 信号频率,直至转速达到理论转速,完成播种作业。
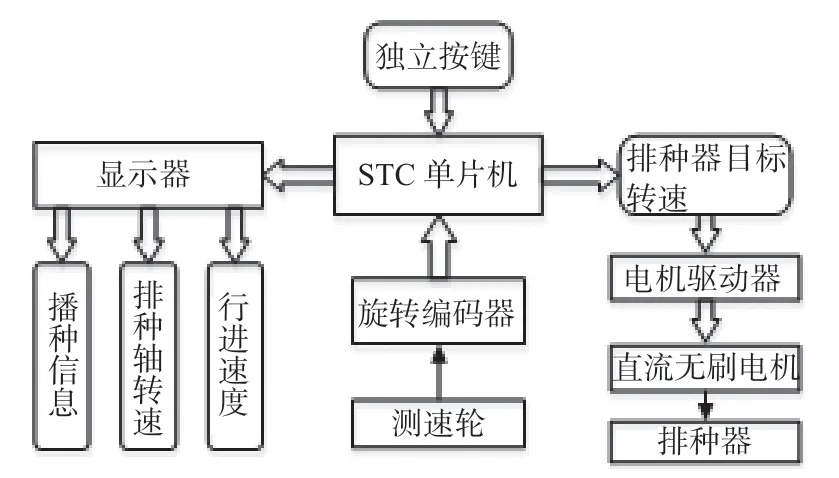
图1 电控播种系统结构框图Fig. 1 Block diagram of electronically controlled seedmetering system
2 系统设计
2.1 系统硬件设计
电控播种系统的硬件设计主要包括单片机系统电路设计、电源电路设计、RS485 通信电路设计、按键显示电路设计、直流无刷电机控制电路设计。系统选用HN3806-AB-400N 旋转编码器,按照扭矩和转速要求,选用80BL02 直流无刷电机,同时使用减速比为1∶20 的减速器配合使用,配套选用BLD-300B 电机驱动器。图2 为本系统的电机控制电路。
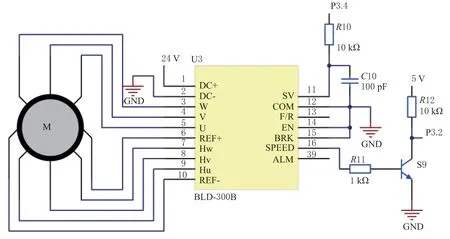
图2 电机控制电路Fig.2 Control circuit of motor
U3为电机驱动器,DC+、DC-接24 V 直流电源,为电机驱动器供电;W、V、U、Hw、Hv、Hu、RBF+、RBF-分别与直流电机相连,为电机提供电源,实现霍尔传感器信号的传输;COM、EN、BRK 共地,控制电机正转,不使用刹车控制功能;SV 通过由电容与电阻组成的滤波电路与单片机的P3.4 口相连,完成PWM 信号的传输;SPEED 通过滤波电路与单片机的P3.2 口相连,实现电机转速信号的传输,由单片机获取脉冲信号并计算电机转速。
2.2 系统软件设计
系统软件开发环境为Keil μVision4,使用C 语言编写,采用模块化编程。系统上电,程序初始化后,需要用户依次进行播种模式选择、播种信息输入、启动电机的操作,之后系统通过旋转编码器检测车速信息,实时检测、控制电机转速,当需要停止播种时,由拖拉机驾驶员按键停止。系统总流程如图3 所示。
2.3 控制系统的数学模型
播种监控系统可实现玉米等作物的单粒精播和小麦等作物的精量条播,播种作业速度、排种轴转速和播种作业信息之间的数学关系模型分为单粒精播模式和条播模式。
2.3.1 单粒精播模式 以玉米播种单体为研究对象,已知排种盘转动一圈可播下的种子数为m,相邻2粒种子下落时间间隔为:

式中Δ t—相邻2 粒种子下落时间间隔,s;
n—排种盘转速,r/min。
粒距为:

式中 Z—设定粒距,mm;
v—机具行进速度,km/h。
由公式(2)得:

被测轮的半径为R,单位为mm,则公式(3)可化为:

式中 n1—被测轮转速,r/min;
R—被测轮半径,mm;
Z—设定粒距,mm。
2.3.2 条播模式 以槽轮式小麦精量排种器为研究对象,播种作业时,经过时间t(s)可得:

将式(5)化简得:

式中 n—排种器转速,r/min;
n1—测速轮转速,r/min;
Q—设定播种量,kg/hm2;
d—播种行距,mm;
L—播种行数,行;
R—被测轮半径,mm;
h—排种器旋转一圈排种量,g。
3 PID 控制的实现
3.1 增量式PID 控制
PID 控制原理是将偏差的比例、积分和微分,通过线性组合构成的控制量控制被控对象,包括位置式PID 和增量式PID 2 种[22-24]。PID 控制的一般公式为:

式中:Kp为比例系数,Ti为积分时间常数,Td为微分时间常数,e(t)为给定值与实际输出值的偏差,u0为控制量初值,t 为时间,单位s。将PID 控制用于单片机控制系统中,需将公式(7)离散化处理得:

式中:Ki=Kp(T/Ti),Kd=Kp(Td/T),T 为采样周期,k 为采样时刻。
由式(8)可得在k-1 个采样时刻的输出值为:


将式(9)与式(8)相减可得增量式PID 控制算法公式: 增量式PID 控制算法在单片机系统中不需要累加计算,减少运算时间,当系统被干扰导致误差较大时,可以使用逻辑判断的方法来进行误差判断和消除。
3.2 临界振荡法(Z-N 法)整定PID 参数
3.2.1 Simulink 仿真 Simulink 作为MATLAB 的1个组件,可以对动态系统进行建模、仿真和综合分析,电控播种系统的核心是实现对直流无刷电机的控制,Simulink 仿真的搭建需要控制系统的传递函数,即为直流无刷电机的传递函数,由电机学原理可知直流无刷电机的微分方程为[7]:

式中:Td为电磁时间常数,Tm为机电时间常数,n1为电机转速,Ce为电机反电动势系数,U0为电枢电压。对式(11)进行拉氏变换得传递函数为:

系统选用型号为80BL02 直流无刷电机,相关参数为:Td=0.01 s ,Tm=0.978 s ,Ce=0.075[V·(r·s-1)-1],代入式(12)得:

电控播种系统Simulink 模型如图4 所示,输入为机具行进速度,输出为电机转速,模型中KP、KI、KD 分别代表增量式PID 控制算法公式(10)中的Kp、Ki、Kd。
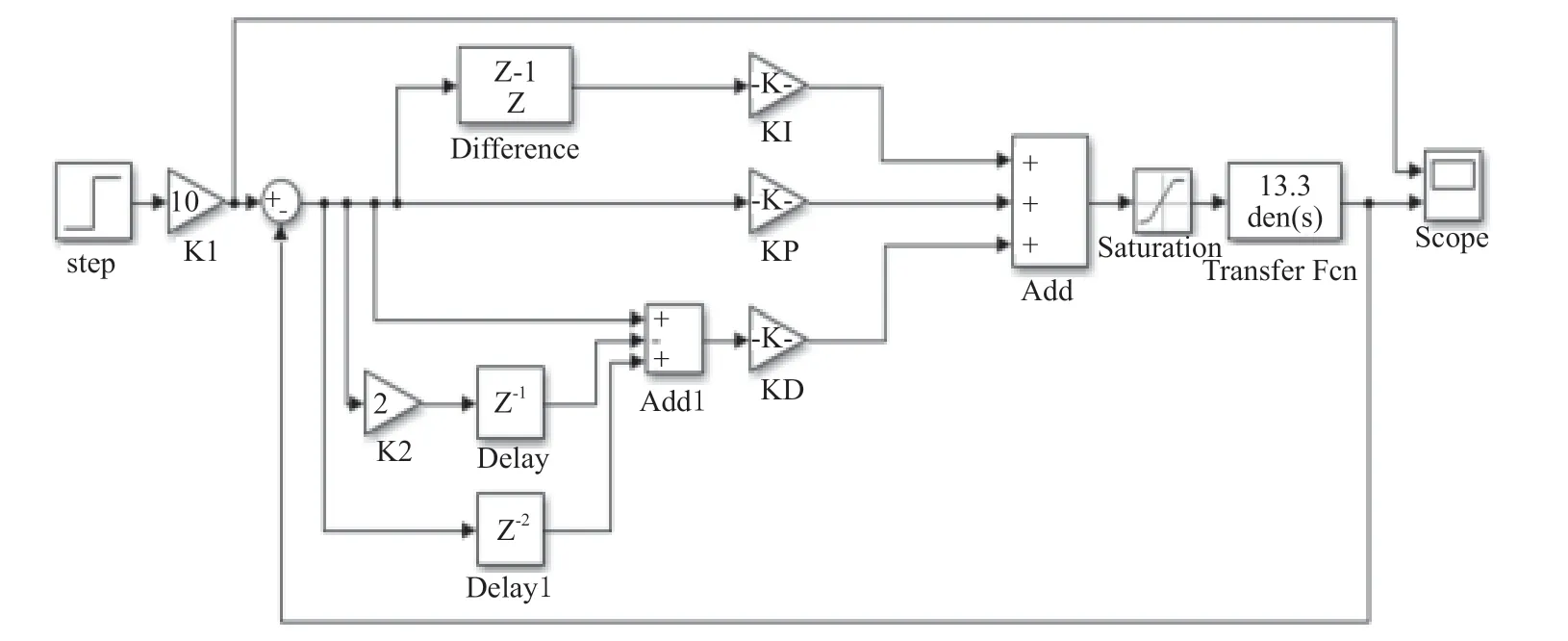
图4 Simulink 模型Fig.4 Simulink model
3.2.2 PID 参数整定 传统的PID 参数整定方法可得到1 组固定的最优参数,但在实际运用中PID 控制的最优参数往往随着系统的运行会产生变化,固定的参数不能满足控制精度的需求,故本文使用临界振荡法,即Z-N(Ziegler-Nichols)法,得到1组PID 参数作为初值,通过模糊控制实现PID 参数的自整定,以提高控制系统性能。
Z-N 法参数整定步骤为:首先将KI 与KD 置零,调节KP,使系统产生振荡;其次调节KP,直至系统开始出现等幅振荡,找到临界振荡点,记录KP 的临界值Kpcrit 和振荡周期Tcrit;再次参照Z-N公式计算出相应的KI 与KD 的值,Z-N 公式如表1所示,表中Ti和Td分别代表积分时间常数和微分时间常数;最后对KP、KI、KD 进行适当调整。

表1 Z-N 法参数计算公式Table 1 Parameter calculation formula based on Z-N method
对KP 进行由大到小的调整,观察响应曲线,当Kpcrit=25 时,系统响应曲线出现等幅振荡,振荡周期Tcrit=0.2 s 如图5 所示。系统使用PID 控制器,依照表1 中PID 控制器对应公式可得:KP=15,KI=150,KD=0.36,并输入到Simulink 模型中仿真,得到系统响应曲线如图6 所示。
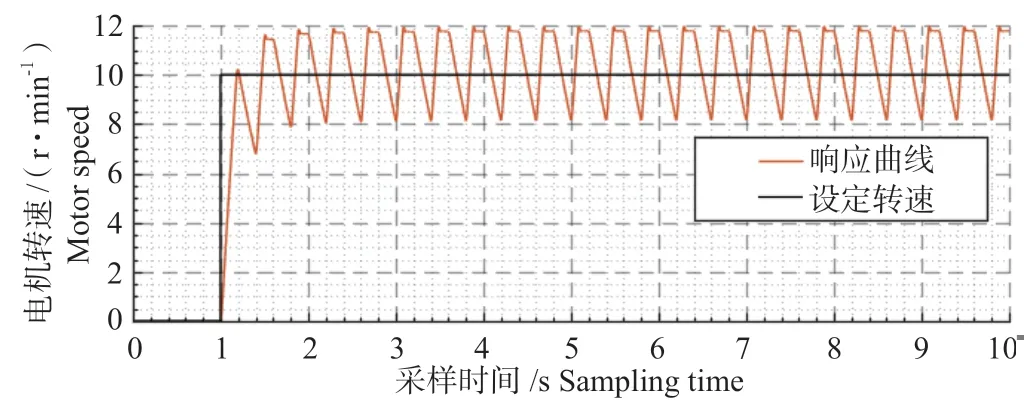
图5 等幅振荡响应曲线Fig.5 Constant amplitude response curve
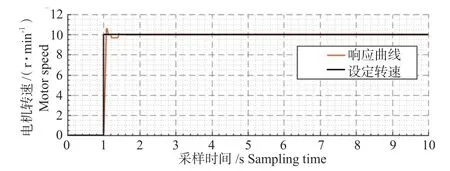
图6 Z-N 法参数整定后响应曲线Fig.6 Response curve after parameter tuning based on Z-N method
使用Z-N 法整定后的PID 参数得到的系统响应曲线,响应时间为0.45 s,但系统仍有超调量,为了进一步缩短响应时间、减少超调量、提高系统稳定性,在Z-N 法基础上对PID 参数进行调整,最后得到1 组参数为KP=19,KI=115,KD=0.15,对应系统响应曲线如图7 所示,系统响应时间为0.38 s,基本无超调量。

图7 调整PID 参数后响应曲线Fig.7 Response curve after adjusting PID parameters
3.3 模糊PID 控制
在播种作业中,机具行进速度实时变化,使用1 组固定的PID 参数存在适应性差、控制稳定性不高的缺点,为提高排种控制稳定性和精度,使用模糊PID 控制方法[25-26],实现PID 参数自适应调节。
3.3.1 控制原理与设计 模糊控制基本过程是,首先将变化量模糊化,再进行模糊推理,最后解模糊得到控制量,过程中需要使用知识库(包括数据库和规则库)。模糊PID 控制的原理是使用模糊控制器完成对PID 参数的整定,控制策略结构如图8 所示。

图8 模糊PID 控制器结构图Fig.8 Structure diagram of fuzzy PID controller
3.3.2 控制策略的实现 模糊PID 控制器的输入量为误差e 与误差变化率ec,模糊化过程需要将输入变量经过量化因子与变量论域相对应,依据量化结果和模糊子集得到输入量对子集的隶属度,模糊子集与输出变量Δ Kp、Δ Ki、Δ Kd的模糊子集相同,均为:
{NB,NM,MS,Z0,PS,PM,PB}
各变量的论域均选取为[-6,6],量化因子为

ne、nec为模糊级数,emax、ecmax为变量e 与ec的最大值,解模糊过程需要经过比例因子,将模糊量转化成精确量,比例因子为:

Kpmax、Kimax、Kdmax分别为PID 参数变化的最大值,L 为输出量的模糊级数。模糊化、解模糊均需得到变量在模糊子集上的隶属度,使用MATLAB 软件可得到隶属度函数曲线,例如输入量e 的隶属度函数如图9 所示。

图9 隶属度函数曲线Fig.9 Membership function curve
根据Kp、Ki、Kd模糊规则,并进行解模糊过程,将模糊量转化为精确量,分别得到ΔKp、ΔKi、ΔKd的模糊控制查询表,ΔKp的查询表如表2 所示。通过Simulink 仿真得到模糊PID 控制的系统响应时间为0.15 s,缩短了0.23 s。

表2 Δ Kp 模糊控制查询表Table 2 The query form of ΔKp for the fuzzy control
4 电控系统播种试验
试验以‘郑丹958’玉米种子为研究对象,进行玉米单粒精播试验。试验设备包括:电控播种系统1 套,80BL02 直流无刷电机1 台,BLD-300B电机驱动器1 台,HN3806-AB-400N 旋转编码器1个,12 V 直流蓄电池1 台,220 V 转24 V 电源模块1 个,勺轮式玉米排种器和单体各1 台。参照GB/T 6973—2005《单粒(精密)播种机试验方法》[27],选择合格指数、重播指数、漏播指数和合格粒距变异系数为评价指标,
4.1 土槽试验台试验

图10 土槽试验台试验设备安装示意图Fig.10 Test equipment installation pictures on soil tank test bench
4.1.1 试验设计 土槽试验台试验设备安装示意图如图10 所示。试验选取3、6、9 km/h 3 个水平的行进速度,在每个速度下进行设定粒距分别为100、150、200、250、300 mm 的播种试验,每组试验重复3 次,试验结果如表3 所示。
4.1.2 试验结果与分析 由表3 可知,在不同设定粒距试验情况下,系统的合格指数、重播指数、漏播指数和合格粒距变异系数均满足JB/T 10293—2013《单粒(精密)播种机技术条件》[28]。如图11 和图12 所示,在不同设定粒距和不同播种作业速度下,播种质量指标的变化均在6%以内,设定粒距在250 mm 时,合格粒距变异系数最小为15.03%,播种均匀性最好。变速作业中,合格粒距变异系数较高,但试验结果满足行业标准要求,播种效果良好。

图11 不同设定株距下播种质量指标Fig.11 Seeding quality indicators under different planting distances

图12 不同作业速度下播种质量指标Fig.12 Seeding quality indicators at different operating speeds
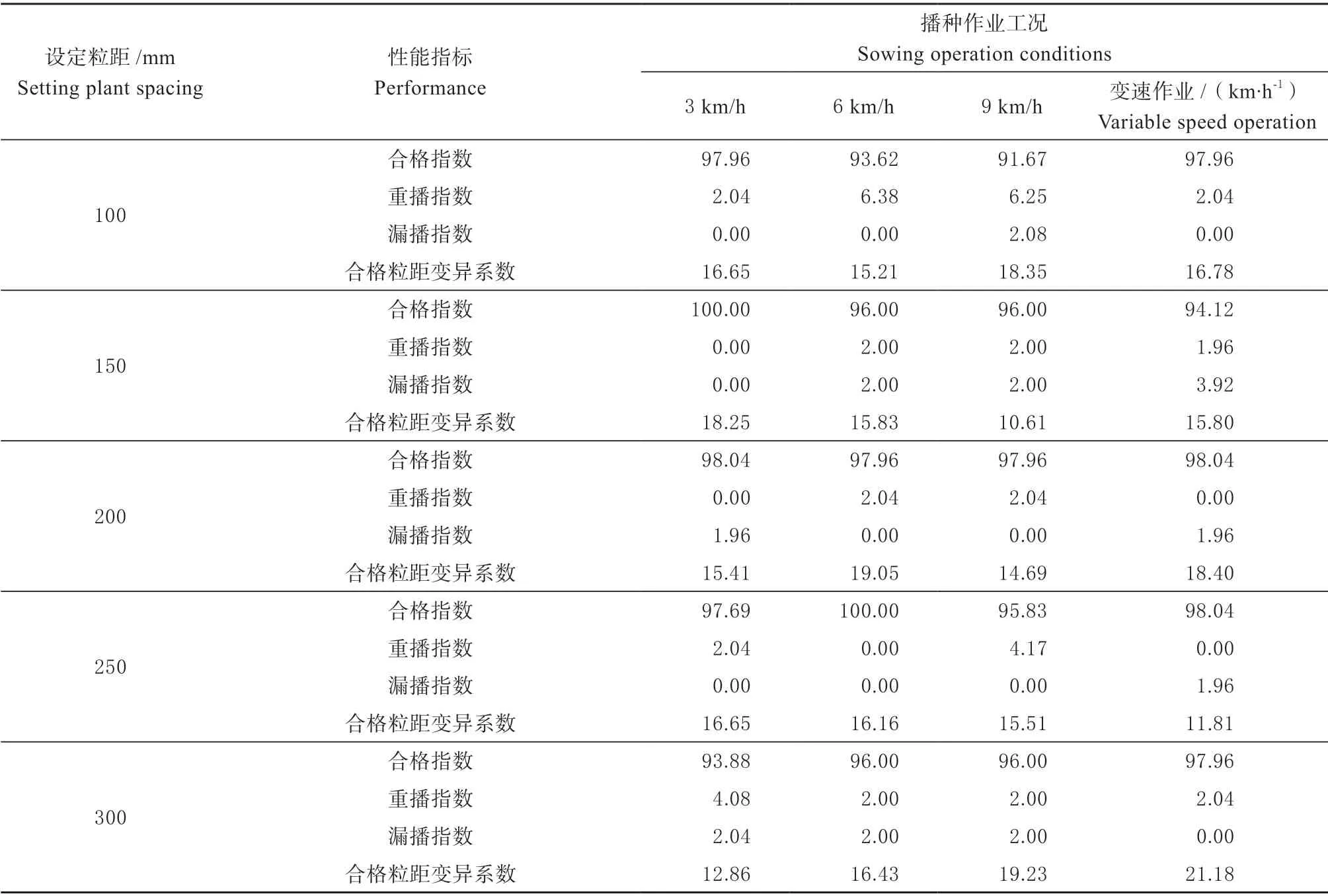
表3 土槽试验结果Table 3 Testing results on the soil tank test bench %
4.2 土槽试验台对比试验
在土槽试验台上同时进行了不加装电控系统和加装电控系统的对比试验,不加装电控系统的玉米播种单体的合格指数为90.7%,漏播指数为5.67%,重播指数为1.76%,合格粒距变异系数为18.47%。加装电控系统的播种质量较之得到了大幅提高:合格指数提高了6.04%,漏播指数下降了4.57%,重播指数下降了0.61%,合格粒距变异系数下降了2.23%。如图13 所示,播种作业速度为6 km/h,设定粒距为250 mm,分别选取150 个粒距测量结果进行对比,加装电控播种系统的播种效果明显优于不加装电控播种系统。
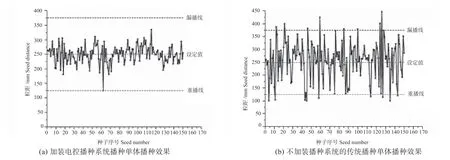
图13 土槽试验台播种效果对比试验Fig.13 Comparative test of seeding effect on soil tank test bench
5 结论
(1)为解决传统播种机由于地轮打滑导致播种均匀性下降的问题,设计了1 套电控播种系统,使用直流无刷电机驱动排种器,可实现玉米等作物的单粒精播和小麦等作物的精量条播。
(2)运用Z-N 法和模糊控制相结合的方式实现PID 参数的自整定,建立了直流电机数学模型,并使用模糊PID 控制算法实现对电机转速的控制,借助MATLAB 完成模糊PID 控制的设计并使用Simulink 仿真,将系统响应时间缩短了0.23 s,提高了控制精度。
(3)通过加装与不加装电控系统土槽对比试验表明:播种合格指数提高了6.04%,漏播指数下降了4.57%,重播指数下降了0.61%,合格粒距变异系数下降了2.23%,播种均匀性得到了明显提升,系统满足JB/T 10293—2013《单粒(精密)播种机技术条件》的要求,具有良好的播种效果,可用于示范推广。
