基于安全信息认知的驾驶员视听差错影响机制研究
2021-03-17肖志江
■ 肖志江
娄底职业技术学院 娄底 417000
0 引言
交通安全作为公共安全的一部分,其事故的发生将会对人民的生命安全以及家庭幸福产生极大的威胁,一位法国学者曾认为汽车比战车更凶残,前者只出现在战场上,而后者作为“飞奔的棺材”,无论何时何地,是敌人还是朋友,只要是在道路上都有可能被运动着的汽车撞死、撞伤的危险[1]。新世纪以来,我国交通建设发展迅速,学术界对交通安全的研究的话题也越来越多,如道路交通的安全管理[3-5]、交通安全教育[6-8]、交通安全心理学[9-10]和交通安全技术[11-12]等。同时,随着人工智能的出现,例如自动驾驶、导航、自动避让系统等,这为交通安全的发展带来了机遇,也提出了挑战。数据表明,道路交通事故占安全生产事故的80%以上,成为安全生产领域的“头号杀手”,超过95%的交通碰撞是由驾驶员驾驶失误造成的,其中驾驶员视听感知差错是其行为失误的主要原因。因此,对驾驶员视听差错影响机制进行研究,将促进新的交通安全促进策略的形成。
过去,学者们从认知的视角对驾驶员的行为及其可靠性进行了研究。例如:Hamdar Samer H 等[13]通过分析心理因素和执行或感知错误的异质性对事故数量及其分布的影响,对司机的驾驶的不确定性、预期的时间和反应时间进行分析继而制定出特定的心理认知模型;Anstey Kaarin J 等[14]建立了多维度驾驶安全模型表明认知和视觉能力决定驾驶安全行为;Lee Soobeom[15]通过模拟识别驾驶员在不同道路环境下的认知差异,并通过驾驶模拟器发现道路安全设施与安全程度之间呈正相关关联;段莉[16]从认知失误视角通过信息融合技术对驾驶行为可靠性进行了研究等。
信息作为大数据时代、工业4.0 时代、人工智能时代的要素,对安全生产生活有着极其重大的影响,安全信息的丢失或不对称是造成事故的主要原因[17]。安全信息认知作为信息时代的产物[18],是安全科学、信息科学、认知科学的综合交叉,它以人为第一视角,映射到自身和自身以外的其他对象,对于交通安全的研究将具有普适性、系统性、实用性和动态性等特点。冯伟等[19]从安全信息认知的角度提出了一个新的事故致因模式,他指出导致事故的影响因素包括信源、信道和信宿。同时,吴超[20]指出安全信息认知的正确与否与行为结果联系密切。因此,提高驾驶员在驾驶前和前驾驶过程中的安全信息认知的正确率,是预防预测交通事故发生有效途径,这关系到安全行为产生的所有环节,即安全感知、安全认知和安全执行。
通过对上述研究的述理可知,过去学者们对驾驶员行为的研究具有一定的贡献,能确定不安全行为发生时的生理心理状态以及驾驶员自身状况的影响状况等,但是其对驾驶员不安全行为出现的根本原因及其机理缺乏认识,使得对驾驶员不安全行为的管理和预防缺乏高效性和针对性。鉴于此,本文从安全信息认知视角出发研究驾驶员视听差错影响机制,它能将驾驶环境中的所有安全信息结合起来,形成由安全信息、信息载体和驾驶员所构成的整体,以明确驾驶员视听差错导致不安全行为的整个过程中所有影响因素及特性,从而能针对性地提高驾驶员安全感知、安全认知和安全行为的正确率。
1 驾驶员差错影响因素分析
交通事故的直接原因,则是在驾驶员驾驶过程中出现了差错,差错直接体现于时间和执行的正确性,亦即驾驶员自身行为反应上,因为反应时间过长或推迟或错误而发生事故,而间接体现在视觉反应和听觉反应上,这些方面又会与驾驶员本身的因素、车辆因素、天气气候因素、不可抗力因素和安全能力因素等相关。从信息的视角出发,驾驶员在驾驶过程中的所有动作的执行是由若干安全信息认知过程构成的,可知交通事故时由于错误信源或负面信噪的影响,最终导致响应动作出现差错,从而引起人员伤亡和财产损毁的事件。从上述定义可以发现,从安全信息认知角度出发,能够更加完善地研究出交通事故发生的原因及过程,它是以人为第一人称视角,结合主观因素和客观因素,全面地概括驾驶员在驾驶过程中出现差错的影响因素。基于安全信息认知构建的汽车驾驶员差错影响因素分析图如图1所示[19]。内容阐述如下:
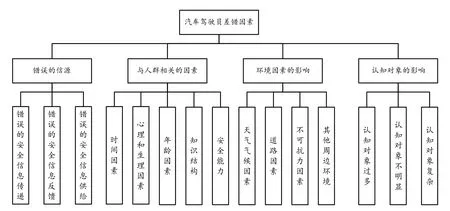
图1 驾驶员差错影响因素分析
(1)错误的信源造成交通事故的发生,是指与驾驶员相关的信宿(包括人群和组织),涉及到交通安全部门、媒体、驾驶前的周围人群和驾驶时的周围人群等,供给、传递或者反馈的不及时、不合适或者错误的信息,导致驾驶员不能及时或正确地应对当时的状况,出现差错。比如:交警指挥错误;错误的指示牌;电视或广播对于相关交通通报的情况出现错误;乘车人错误信息的传递或反馈等,均是错误信源的现实体现。
(2)人群自身的因素涉及多个方面,包括:驾驶所处的时间,有数据表明,全球60%的交通事故发生在晚上,占交通事故死亡人数的50%[20];行驶的持续时长,时长越长,人越疲劳,驾车危险性越大;驾驶员的年龄大小,不同年龄段在视觉、听觉、临时反应、速度估计和操作等方面都有所区别[21],特别是老年人,身体机能各方面均在快速下降;人的生理因素和心理因素,不健康的生理因素和心理因素会严重影响驾车的稳定性和准确性;知识结构,完善的知识结构能够使得驾驶员能应对各种情况;安全能力,分为主观安全能力和客观安全能力,前者如安全意识、安全伦理和安全道德等,后者如安全氛围,及家庭安全氛围、团队安全氛围、社会安全氛围和国家安全氛围。
(3)环境因素包括天气因素、气候因素、不可抗力因素、道路因素和其他周边环境的影响。天气和气候的好坏直接影响到人的生理和心理,如:雾霾降低了能见度,从而间接影响的人的视觉功能;大风影响了人的听觉功能;降雪影响了人的判断能力;高原低氧环境会导致驾驶员心律失常[22];上述情况均会增加驾驶员的心理紧张度和生理负担。不可抗力因素是完全出乎人的意料之外的一些自然灾害,比如山体滑坡、地震、洪水、海啸等,大大增加了驾驶的难度和危险性;道路因素常常与天气相联系,道路结冰、湿滑的状况同样会增加驾驶的难度和危险性,另外路况则是又一关键因素;其他周边环境分为两个方面,噪声、温度、光线等具有自然属性的因素是一方面,言语、电子设备等能分散驾驶员注意力的因素是另一方面。
(4)认知对象方面的因素。在行驶过程中,认知对象涉及所驾驶的车辆、周围其它车辆、道路、车上的其他人群和道路周边事物等,由于认知对象不明显、过多认知对象的干扰或认知对象复杂等情况,致使行驶过程中出现错误。
2 驾驶员视听差错影响机制模型
认知是一个自发的过程,感知亦是如此。驾驶员通过对相关信息的接收和处理,判断自身车辆状况、周围的行车环境、车辆位置状况、交通指令信息以及周围人群动态等,以此来进行预测和决策,从而采取响应动作来增加交通的安全性和畅通性。驾驶员对行驶过程中的听觉信息、视觉信息的感知是否正确,将对后续形成的认知信息是否正确产生直接的影响。基于上述内容构建如图2所示的感知差错理论模型。感知是一个生理性的过程,信源以信源载体的形式通过信道传递给人体,首先经过相关器官,对器官产生刺激,再经过传入神经、神经中枢,形成感知信息,因此,感知信息是否会产生差错,将会与信源、信道和人体自身状况三者相关。此外,感知、认知和行动是一个链式的过程,感知的差错将对后续的环节产生影响,从而引发多米诺效应。详细介绍如下:
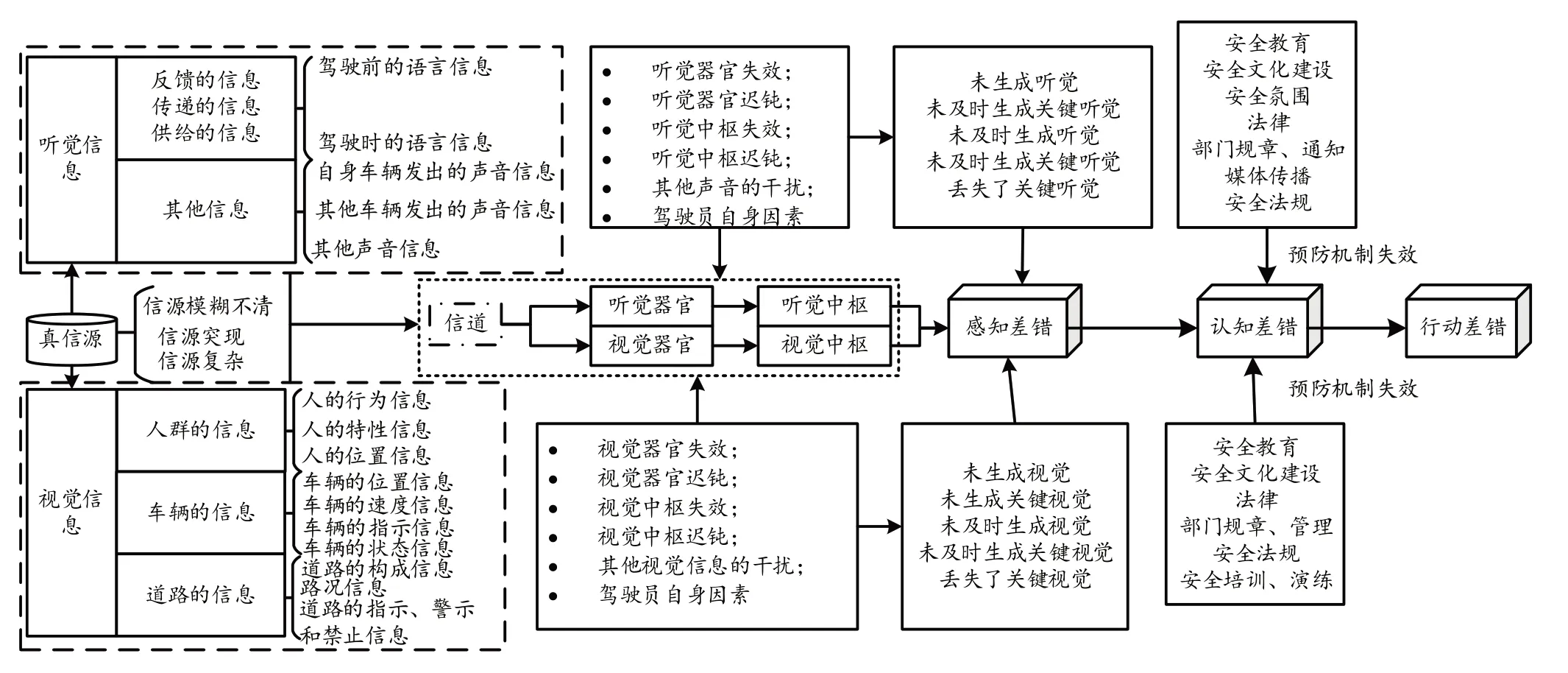
图2 感知差错影响机制模型
(1)信源的种类是极其复杂的,听觉信息中不仅包括人群所发出的声音信息,还包括车辆发出的声音信息,以及其他冗余声音信息;视觉信息则与传统交通的三要素(行人、车辆和道路)相关,关于行人的视觉信息包含人群的行为信息、特征信息以及位置信息等;车辆的相关视觉信息,如位置、速度、指示灯以及状态等,亦是会车过程中做决策的重要信息。当上述出现情况复杂或模糊不清时,信宿会在感知过程中丢失关键信源。另外,驾驶员的驾驶状态是瞬时的,但是认知过程是持续的,认知过程持续的时间长短,与最终安全与否有着重要的联系,因此,突现的信源是致命的。
(2)信道中其他因素的干扰,亦将导致未及时生成关键听觉或关键听觉的丢失。当信宿对信源进行感知时,其他相似信源亦通过所在范围内的信道传播,信息混沌会对信宿对关键信息的感知形成干扰,包括视觉干扰视觉、听觉干扰听觉、视觉干扰听觉、听觉干扰视觉和复合干扰五种情况,其实质是注意力的吸引与转移。另外,温度、噪声、湿度等的不合适都将影响驾驶员的感知。
(3)拥有生理的缺陷的驾驶员是不合格的,耳朵、眼睛和大脑存在缺陷的人群是禁止驾驶机动车的,但是,突发事件对于人群而言是难预防的,临时的器官或神经中枢失效、迟钝都将导致感知出现差错,同时将严重影响驾驶员的判断和后续的动作。因此,定期的身体检查对于驾驶员而言是极其重要的。
(4)人群的认知能力是与很多因素相关的。一个家庭有家庭安全教育、家庭安全氛围;一个学校有校规、学校安全教育、学校安全文化建设、学校安全氛围和安全培训、演练;一个企业有企业职工安全教育、企业安全文化、企业安全氛围、企业安全管理、企业规章制度、安全监察和安全检查等;一个社区有媒体安全宣传、社区安全教育、社区安全文化等;国家则有法律法规。上述安全预防机制的运行,对驾驶员及其他人群在安全道德、安全伦理等自我安全意识方面的影响以及其他安全能力的提高均有极大的帮助,为他们在生活、工作过程中进行正确的安全信息认知提供了坚实的基础。上述预防机制的影响范围是在国家领土范围内的所有人群,一旦预防措施失效,在感知差错的基础上,便会出现认知上的缺陷。
由上述分析可知,感知和认知都是自发的,而执行动作是根据认知信息来进行的,一旦认知信息触发了执行按钮,便执行响应动作,因此,执行是非自发的,他具有预防性和决策性,在安全领域,执行的目的便是控制危险源的出现和事故的发生。那么,驾驶员在驾驶过程中,生成认知信息,并进行紧急执行或其他非紧急安全执行(如减速、转向、紧急减速、紧急转向),以保护自身、乘车人以及其他行人行车的安全。因此,要防止驾驶员出现不安全行为,应当从优化其视听感知着手。
3 驾驶员视听差错数学模型
3.1 感知差错数学模型
由理论分析知,感知是否产生差错与信源、信道和信宿三者相关,而在短时间内产生的感知信息由这个时间段内出现的信源的相关内容构成。用SI、IS、IR、IH表示感知、信源、信道和信宿,感知信息的构成如公式1所示,感知信息差错的函数关系式如公式2所示。

式中:IS—信源,它包括驾驶前和驾驶中所涉及的人群、行车、道路、交通指示牌、媒体通知等听觉信源和视觉信源,其模糊性、复杂性将决定其对感知的影响程度;
IR—信道,它指听觉信息和视觉信息在传播、传递、供给和反馈过程中的空气介质,包括在一定空气范围内相应听觉信息和视觉信息,以及所在环境中温度、湿度、噪音、气候等因素;
IH—信宿,它包括驾驶员、其他行车人员、行人、乘车人以及交警等,相关信宿的安全意识、安全知识结构、安全行为能力以及其心理、生理等方面的状况决定这方面的影响程度。
由于安全信息认知具有多级性,过程中信息传播包括并联(一对多)、串联(一对一)、聚合(多对一)和混联(包含串联、并联和聚合3种模式中的两种及以上)4种模式[23],因此,感知信息、认知信息的形成以及响应动作的执行均具有多级性,以混联为信息传播的真实状况,其包含了其他3 种情况。令IS=y(I1,I2,…,Ix,…,In),其中Ix为感知的关键信源,其他均为无关信息。当且时,感知信息完全正确,且无其他信息干扰,或排除了其他信息的干扰;当时,感知信息不完整,但Ix为所生成的感知信息中最突出的信息,亦即感知信息受到了干扰,但影响不大;当0 <时,感知信息不完整,且Ix不是为所生成的感知信息中最关键的信息,产生感知差错,这就是其他因素成功地干扰了关键感知信息地生成;当时,关键信息丢失。
3.2 认知差错数学模型
认知信息是在感知信息生成的基础上对其进行加工、处理生成的,因此,认知信息产生差错的因素来源于4 个方面,亦即感知、信源、信道和信宿。用UI表示认知信息,则认知信息的构成如公式3所示,认知信息出现差错的表达式如公式4所示。

式中:IS—信源因素,它包括驾驶前和驾驶中所涉及的人群、交通指示牌、媒体通知、重要文件等听觉信源和视觉信源,伪装的真信源是直接影响认知信息正确性的重要因素,同时,认知对象的复杂性及模糊性将对认知的时长及正确性产生影响;
IR—信道因素,主要指所在认知环境中温度、湿度、噪音等因素;
IH—信宿因素,驾驶员的安全意识、安全知识结构、安全行为能力以及其心理、生理等方面的状况决定这方面的影响程度;
SI—感知因素,感知信息的不清晰、不关键、错误或不及时都将对认知信息的正确性和及时性产生影响。
同样令SI=(SI1,SI2,…,SIx,…,SIn),其中SIx是生成的关于关键信源的感知信息。 则,那么当不存在关于关键信源的感知信息时,必有f'(ISx)= 0,此时,因此认知信息的正确性存在如下分段函数关系:
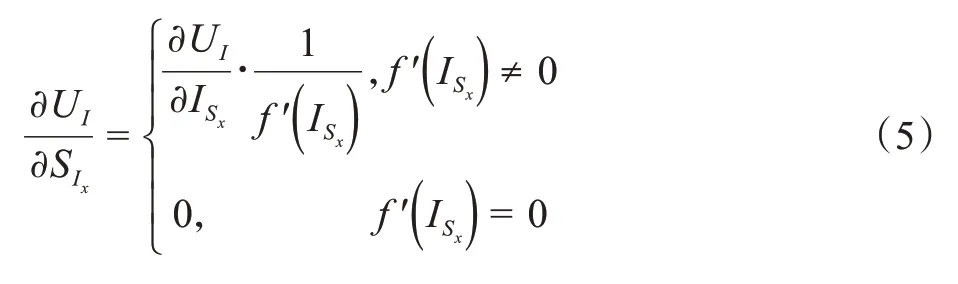
当f'(ISx)≠0 时,可视为信宿对关键信源的认知状况,而f'(ISx)可视为信宿对关键信源的感知状况。若,对关键信源的感知和认知均完全正确,无其他因素的干扰,或干扰无效;若f'(ISx)<1,亦即关键信源的感知和认知相同,但均不完整,此情况属于感知过程受到了其他因素的干扰,认知过程中未受到干扰或干扰无效;当时,,一方面在于对关键信源的认知完全正确,但感知不完整,此时在感知过程中受到了其他因素的干扰,但是在认知过程中由于信宿自身经验教训等其他因素的帮助或其他信宿的提醒等因素,使得认知与关键真信源完全相符;另一方面,则是对关键信源的认知不完全正确,感知亦不完整,且认知正确较感知更高,其原因同样是在认知过程中由于信宿自身经验教训等其他因素的帮助或其他信宿的提醒等因素,使得认知向关键真信源更加靠近;当时,,分为两种情况,首先在于对关键信源的感知完全正确,此时在认知过程中存在影响因素,使得认知信息产生差错;其次是信宿对关键信源的感知存在差错,同时在认知过程中存在影响因素的继续干扰,使得认知信息的差错更大。
3.3 行动差错数学模型
安全信息认知过程中,动作的发生是在最终形成的认知信息指导下完成的,在执行过程中,其影响因素包括认知、信宿和信道三者,用A 表示执行,则执行内容的构成如公式6 所示,执行出现差错的表达式如公式7所示。
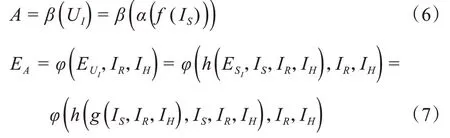
式中:IR—信道因素,主要指所在执行环境中的温度、湿度、噪音、光线、天气状况等因素;
IH—信宿因素,信宿的安全行为能力以及其心理、生理等方面的状况决定这方面的影响程度;
UI—认知因素,认知信息的不清晰、不关键、错误或不及时都将对执行的正确性和及时性产生影响。
令UI=(UI1,UI2,…,UIx,…,UIn),其中UIx是生成的关于关键信源的认知信息。 则那么当不存在关于关键信源的认知信息时,必有α'ISx= 0,此时。同样,得到公式8所示的分段函数:
那么,当α'ISx≠0 时,若,则认知信息完全正确,且在正确认知信息的指导下,执行同样完全正确;若,亦即对关键信源的认知不完整,且执行完全按照该认知信息的指导进行,此情况属于感认知过程受到了其他因素的干扰,执行过程中未受到干扰或干扰无效;若,分两种情况,一种是当对关键信源的认知完全正确,但在执行过程中由于信宿自身、环境因素或其他因素的干扰下导致执行出现差错;另一种是当对关键信源的认知不完全正确,且在执行过程中受到影响因素的进一步干扰;若,此时信宿对关键信源的认知不完全正确,但在执行过程中,由于信宿自身经验教训等其他因素的帮助或其他信宿的提醒等因素,使得认知向关键真信源更加靠近或完全正确。
4 结论
(1)在安全信息认知视域下,以驾驶员为第一视角对影响驾驶行为的因素进行了分析总结,影响因素从信源、信宿和信道3个方面进行概括,相比于传统上人们熟知的风险因素的概括方法而言,该方法从安全范式出发,其结果更具全面性和可靠性,这也将使得人们对交通中的风险感知更加全面,从而提高交通安全行为的可靠性。
(2)安全感知、安全认知和安全行为是一个链式的过程,其过程中任何一个环节出现差错,都可能导致不安全行为的出现。因此,该文从视听感知差错出发对驾驶员不安全行为机理进行研究,并构建模型,这为当前“金字塔”式的交通安全治理模式的运行敲响了警钟,并为其优化提供了思路。
(3)对关键安全信息的处理是决定驾驶行为安全与否的关键。从关键安全信息出发,构建了安全感知差错、安全认知差错以及安全行为差错的数学模型,一方面使得未来人工智能对于未来在关键信息获取敏感度的提升具有一定的促进作用;另一方面能确定驾驶员自身的安全素质能在驾驶安全中起到决定性作用。这对于未来交通安全人工智能可靠性的提升以及驾驶员的安全素质的加强具有积极的指导意义。
因此,从上述研究结论出发,提出如下对策和建议:
(1)通过各组织对所有个人进行相关安全教育、安全培训,所有人都会成为交通安全的参与者,所有人的行为亦将影响交通安全,因此,在上述方法的指导下,通过安全教育、安全培训将知识和技能传递给所有相关的人,从而提高安全行为的可靠性。
(2)“金字塔”式的交通安全治理模式缺少民众的参与,安全是所有人的安全,因此,应当逐渐向“网络”式的安全治理模式发展,实现全名共治,集齐所有人的力量,实现知识和信息主导,顺应时代的发展的趋势。
(3)交通安全素质(包括发挥安全能力所必须的安全意愿、安全意识等)的提高是我国所急需解决的问题,也是可达到的目标。因此,可通过安全文化建设、安全教育、安全基础设施建设、安全技术的引进等对人们的安全素质进行针对性地优化,以提升人们的安全综合素质。
(4)关键安全信息的识别及其敏感度提升应当作为未来交通安全人工智能关注的重点,这不论是对无人驾驶技术,还是对于安全驾驶辅助技术而言,都将产生深远的影响,具有无限的发展潜力。
