基于拉拽安全性能的汽车座椅优化设计*
2021-03-09张志飞胡桐铜范维春王长金黄瑞文
张志飞,胡桐铜,范维春,王长金,黄瑞文
(1. 重庆大学汽车工程学院,重庆 400030;2. 重庆宏立至信科技发展集团股份有限公司,重庆 401133)
前言
当汽车发生碰撞事故时,安全带将乘员牢牢固定在座椅上,防止乘员飞出车外,而座椅也为乘员提供了足够的空间,防止异物的侵入,最大限度地减轻对乘员造成的伤害[1]。因此国标 GB14167—2013 要求座椅试验后,须保证位移装置处于工作状态,这就意味着座椅滑轨处的变形量不能过大。此外,汽车NVH 性能要求座椅结构应具有较高的模态频率[2],这是座椅轻量化设计时必须满足的性能指标。
座椅结构部件厚度是决定其性能的重要因素[3],可通过局部结构改进和板件厚度优化等方法,在一定程度上实现座椅结构的优化。姚为民等[4]利用相对灵敏度分析筛选出合适的板件厚度作为设计变量,通过尺寸优化使座椅骨架刚度提高11.4%,质量减轻9.6%。针对GB14167—2013 要求的座椅拉拽安全性能,郭鹏程等[5]通过传力路径分析提出了有效的改进方案,并利用尺寸优化实现了座椅的轻量化设计,使座椅上固定点最大向前位移降低44%,同时减质量1.9 kg。朱剑锋等[6]通过试验和仿真分析对卷收器支架、滑环连接处板件、固定点处横梁等关键部位进行了改进,有效提升了车身结构的安全性能。对于座椅拉拽安全的结构耐撞性问题,可通过构建近似模型实现优化设计。郑建洲等[7]通过构建基于敏感参数的Kriging 近似模型进行优化设计,有效提升了座椅子系统的安全性能。
尺寸优化设计只能以部件厚度为变量[4-5],受限于设计区域,对于提高结构性能和轻量化的效果有限。而拓扑优化作为概念设计阶段的重要结构优化手段,可以在指定设计区域内优化材料布置,在变速器壳体、车架、制动盘[8-10]等部件的性能设计和轻量化设计中发挥了重要作用。但是拓扑优化主要面向结构柔度和模态等力学性能[11],难以构建以碰撞安全性能为目标的优化函数,且拓扑优化在动态优化问题中存在计算量大且不稳定的问题。Cavazzuti等[9]在进行汽车底盘的拓扑优化时,通过载荷简化的方式将碰撞类的动态问题线性化,取得较好的效果[9]。可将拉拽座椅的动态载荷转化为静态载荷,利用静态载荷下的结构柔度表征座椅拉拽安全性能,对座椅进行拓扑优化。
为提升某商用车前排座椅的拉拽安全性能,并考虑座椅结构模态频率的约束,从概念设计阶段到详细设计阶段,分别对座椅进行拓扑优化和尺寸优化。通过试验和仿真分析座椅在GB14167—2013工况下的变形趋势,把动态优化问题转换成静态优化问题,构建以结构应变能最小为目标函数的拓扑优化模型。然后基于得到的拓扑结构,以部件厚度为变量,以座椅质量和滑轨最大变形量最小为目标,以结构模态频率为约束,通过变量筛选、试验设计、近似模型构建与求解,实现座椅结构的多目标优化。
1 座椅仿真模型的建立与验证
1.1 试验测试
GB14167—2013 对M1 类座椅系统的试验方法规定如下[12]:
(1)利用模拟肩带,沿平行于车辆纵向中心水平面并与水平线呈向上10°±5°的方向,分别对上、下人体模块各施加13500±200 N的试验载荷;
(2)此外,还应对座椅施加一个相当于座椅总成质量20倍向前的力;
(3)施加载荷时,应先施加总载荷10%的预加载,在4 s内加载至规定值,并至少保持0.2 s。
将座椅系统固定于试验台架上。试验加载情况如图1 所示,模拟肩带角度分别为12.7°和7.8°,上、下人体模块施加载荷分别设置为13 647 和13 659 N,座椅总成质量为21.34 kg,故需对座椅施加的水平载荷为4 183 N,实际加载载荷设置为4 286 N。为保证座椅的性能,实际最大试验载荷为试验设置载荷的1.2倍,载荷加载曲线见图2。

图1 试验加载图
试验利用IMC 采集器,在座椅骨架布置应变片和应变花,测量位置如图3 所示。采集试验数据,用于验证后续仿真模型的可靠性。试验共布置4 个应变花、3 个应变片,其中一个应变片用作温度补偿,减小试验误差。
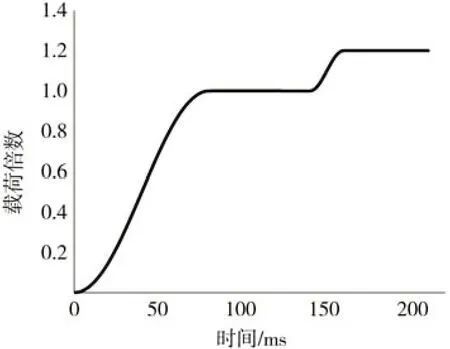
图2 载荷加载曲线

图3 座椅测点位置
1.2 有限元模型
采用Hypermesh和LS‑DYNA建立座椅有限元模型,座椅骨架主要由钣金件与管件构成,所以采用壳单元建立座椅骨架有限元模型。为提高计算效率,单元标准尺寸取5 mm,主要采用四边形单元对几何模型进行划分,利用少量三角形单元进行过渡。各部件之间严格按照实物的连接关系进行连接,采用梁单元模拟各部件间的点焊和缝焊。
参照图1 和图2 所示的试验条件和载荷,添加上、下人体模块等,并设置为刚体单元,施加载荷的角度和大小均与1.1 节所述相同。建立的座椅系统有限元模型如图4所示。
1.3 仿真模型的验证
将有限元模型提交至LS‑DYNA 进行计算,以座椅系统在载荷最大时,应变片布点处的范式应力值和座椅系统的最大变形为指标,分析座椅系统的试验与仿真结果。对比座椅骨架的应力结果,如表1所示。有限元分析的平均误差在5%左右,误差在可接受范围内。
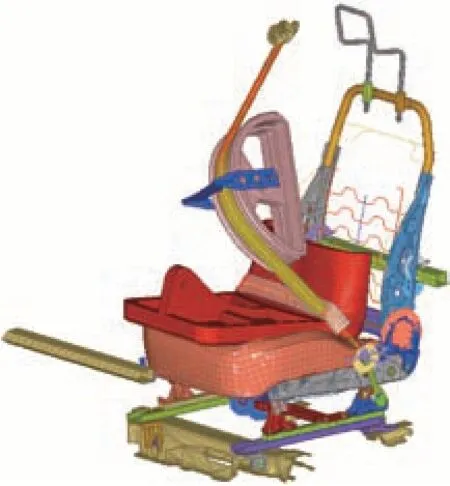
图4 座椅系统有限元模型

表1 最大载荷下范式应力值的结果对比
由于在试验过程中,座椅系统最大的变形发生在座椅安全带卡扣一侧的滑轨处,图5 示出试验与仿真结果对比。由图可见,滑轨在试验与仿真中的变形基本一致。根据法规要求,试验后须保证座椅位移装置处于可工作状态。由于座椅滑轨处发生了较大的变形,使位移装置的使用变得困难,所以有必要提高座椅系统的刚度,以减小座椅滑轨的最大变形量,提高座椅的拉拽安全性能。
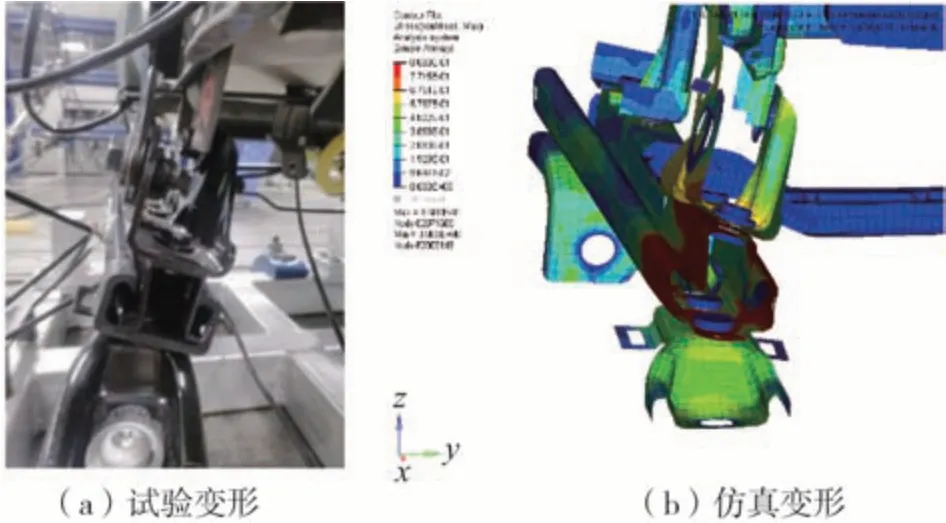
图5 最大载荷下滑轨变形对比
通过表1和图5可知,该仿真模型具有较好的精度,能够有效模拟该座椅系统的法规试验,可用于后续优化设计。
2 座椅骨架结构拓扑优化设计
由于该座椅在动态工况下变形较大,须进行优化设计,而对于该汽车座椅结构,要保证结构模态频率以满足汽车NVH性能要求,同时应使质量更轻。
2.1 静态工况的转换
考虑到拓扑优化在解决动态优化问题时会花费巨大的计算成本,且计算不稳定,根据动态载荷加载的位置和方向,分别在座椅质心、靠背、卡扣处加载4 000、2 000 和 2 000 N 的静态载荷(图 6 中F1、F2、F3所示),利用多个静态载荷模拟座椅在动态工况下的变形趋势,在静态工况下对座椅进行拓扑优化。
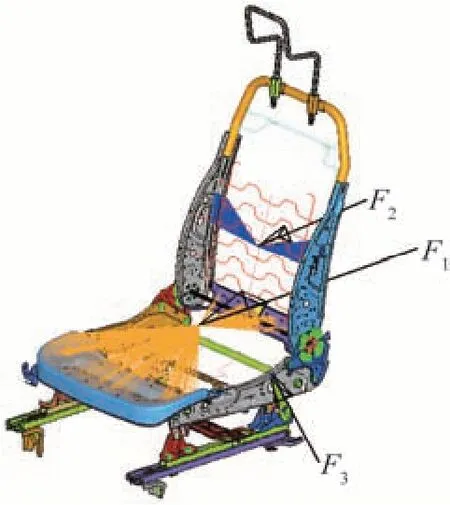
图6 静态载荷加载方式
图7 为座椅骨架及关键部件变形趋势的对比。对比图7 动态工况与多个静态载荷下的有限元结果,可以发现在安全带卡扣一侧的座椅边板、调角器和滑轨等关键部件以及座椅骨架整体的变形趋势基本相同,说明通过上述静态载荷可以模拟座椅在动态工况下的变形趋势。
2.2 拓扑优化数学模型

图7 座椅骨架及关键部件变形趋势对比
本文中的拓扑优化采用变密度法,即人为假设单元材料密度为0-1 之间的连续变量,建立相应的目标函数和约束条件,通过罚函数使单元密度向0或1 两端收敛,得到材料的最佳分布[13]。根据上述分析,基于变密度法,约束体积分数的同时,以第1阶模态频率不低于19.0 Hz 为约束,建立以应变能最小为目标的优化模型为
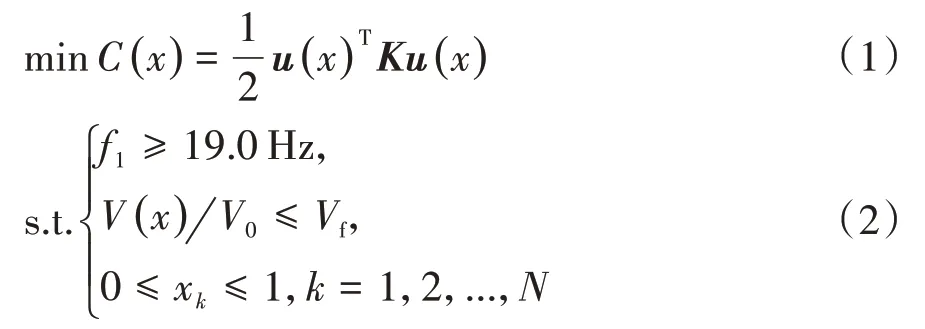
式中:C(x)为静态载荷下结构应变能的评价函数,结构柔度为应变能的2 倍,最小化柔度即最大化刚度;u(x)为静态工况下的节点位移列阵;K为系统刚度矩阵;f1为座椅系统第1 阶模态频率;V(x)为优化迭代后的总体积;V0为系统初始总体积;Vf为设计目标约束的体积分数,通常取0-1;xk为设计变量,即单元材料密度。
2.3 拓扑优化过程
选取座椅边板、座盆、靠背侧板、后围板为拓扑优化的设计空间,根据2.2 节建立的拓扑优化数学模型,约束的体积分数Vf取0.5,利用Optistruct 软件对座椅骨架进行拓扑优化。为得到具有可制造性的拓扑结构,添加最小乘员尺寸约束,约束值为15 mm,防止结果出现棋盘格现象,对于对称部件则添加相应的对称约束[14]。优化的迭代曲线如图8 所示,结果目标函数值由16 310降至11 310。
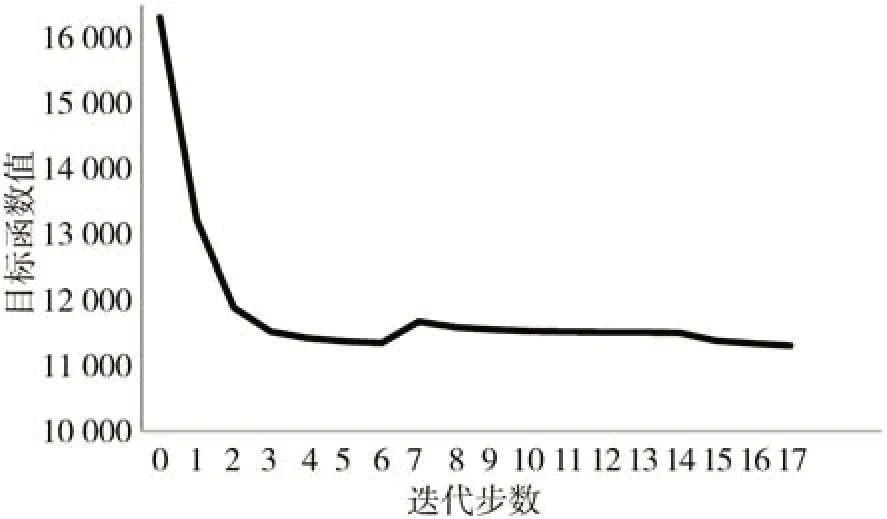
图8 目标函数迭代曲线
以座椅边板为例,去除材料伪密度值低于0.3的部分,剩余中间密度单元较少,拓扑结构清晰,参考该拓扑结构去除不重要的单元材料。图9 为座椅边板的拓扑结构和优化前后对比。
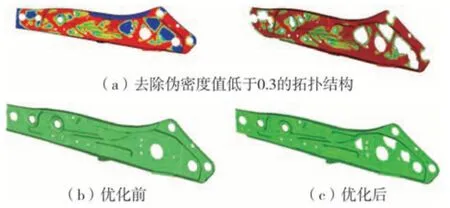
图9 座椅边板拓扑结构和优化前后对比
通过上述方法,对座盆、座椅边板、靠背侧板等部件进行了分析和拓扑结构的设计,提取各部件优化后的拓扑结构,如图10所示。
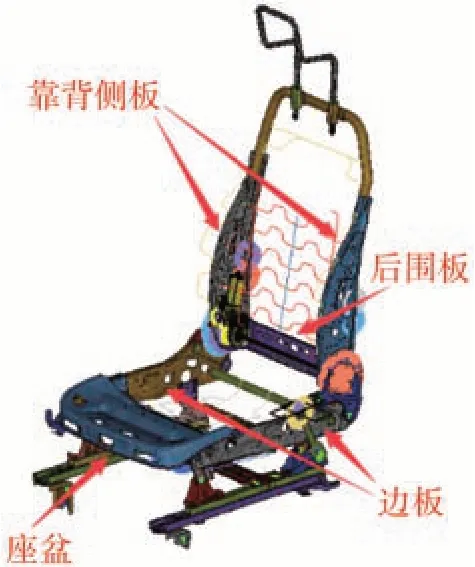
图10 座椅骨架拓扑优化模型
2.4 拓扑优化结果分析
将优化后的模型导入到LS‑DYNA 进行动态工况下的仿真。对比在动态工况下座椅各部件拓扑优化前后的最大变形,如图11 所示。由图可见,除部件2 和4 的最大变形量比优化前有所增加,其余18个部件的最大变形量均有降低,座椅整体刚度提高。这表明,通过多个静态载荷模拟座椅在动态工况下的变形趋势,在静态工况下以座椅结构柔度最小为优化目标,对座椅进行拓扑优化,可以提高座椅在动态工况下的拉拽安全性能。


图11 动态工况下各部件拓扑优化前后最大变形量的变化
表2 为拓扑优化前后,座椅骨架质量、滑轨最大位移和第1阶模态频率的变化。在座椅质量、第1阶固有频率不发生明显改变的情况下,滑轨最大变形得到了改善,说明上述拓扑优化具有较好效果。

表2 座椅骨架拓扑优化前后数据对比
3 多目标尺寸优化
在详细设计阶段以座椅结构部件的厚度为设计变量,以座椅滑轨最大变形量、座椅骨架总质量最小为目标函数,约束座椅1 阶模态频率,对座椅进行多目标优化。优化问题的定义如下:

式中:m(x)和dis(x)分别为座椅质量、滑轨最大变形量;f1(x)表示座椅 1 阶模态频率;x和xori分别为部件的厚度和初始厚度,设计变量上下限均为初始厚度的±20%。
3.1 相对灵敏度分析
以座椅各部件厚度为设计变量,设计Plackett‑Burman 试验,以获得座椅质量、1阶模态频率和滑轨最大变形量对各部件厚度的灵敏度。由于直接利用灵敏度分析筛选设计变量可能会排除一些重要部件[15],导致不能得到满意的优化结果,所以采用相对灵敏度分析进行设计变量的筛选。
相对灵敏度定义为座椅骨架质量和滑轨最大变形量对设计变量的灵敏度与座椅第1 阶模态频率对设计变量的灵敏度之比。通过相对灵敏度分析可以有效确定出对第1 阶模态频率影响不敏感而对质量、滑轨最大变形量影响较敏感的设计变量,比值越大说明部件厚度对第1 阶模态频率的影响小而对质量和滑轨最大变形量影响大。此时,选取相对灵敏度较大的部件厚度作为设计变量,可以在座椅第1阶模态频率变化不大的前提下减轻质量、减小滑轨最大变形量,从而提高优化效率。在此应该指出的是,在拓扑优化后,考虑到图11中第18个部件“座椅头枕杆”是国标对其有强度要求的座椅头枕的重要承载部件,故不宜再作为优化对象,因而只剩19 个部件参加相对灵敏度分析。综合考虑各设计变量的相对灵敏度,从图12 中的19 个部件选取了编号为1、2、3、7、10、13、15、17、18、19,共计 10 个部件的部件厚度作为优化的设计变量。
3.2 试验设计
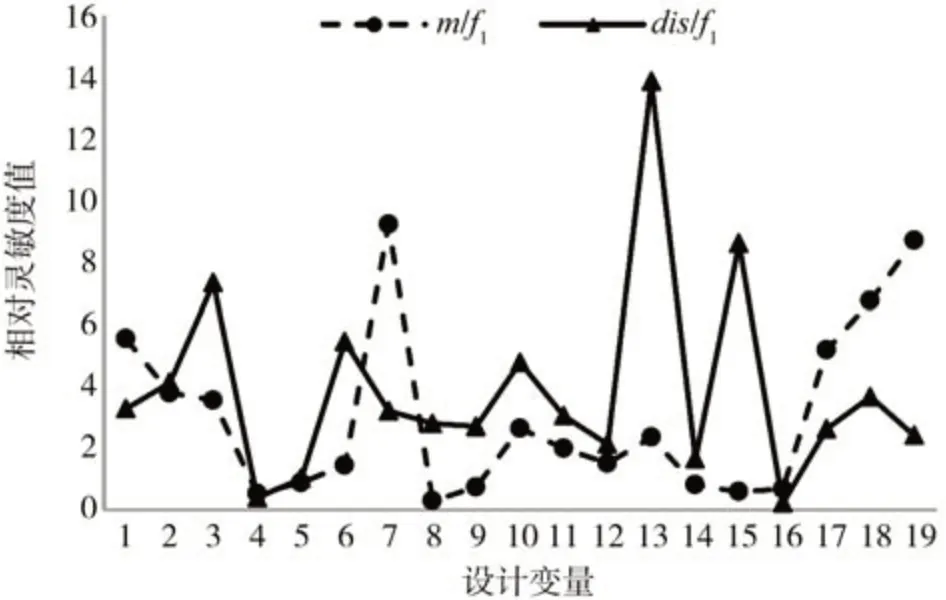
图12 相对灵敏度
试验设计是安排试验用于研究各试验因素对目标影响规律的数理统计方法,主要包括全因子试验设计和正交试验设计等;采样方法则有拉丁超立方采样和哈默斯雷(Hammersley)采样等。与拉丁超立方采样相比,由于哈默斯雷采样抽取的随机样本点能在K维超立方体上具有更好的稳定均匀性,同时可以在较少样本点时提供对输出统计结果的可靠估计[16],所以试验采用哈默斯雷采样采集73 个样本点用于建立近似模型,并利用拉丁超立方采样采集20个样本点检验模型的精度。表3 和表4 分别为哈默斯雷采样和拉丁超立方采样采集的样本点及其响应。
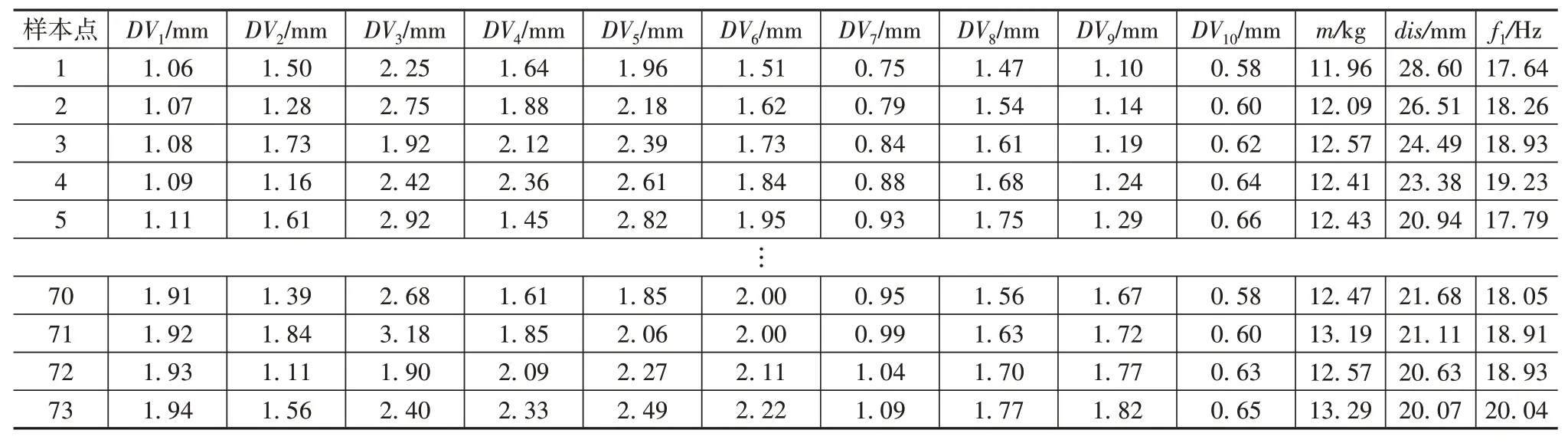
表3 哈默斯雷采集的样本点数据
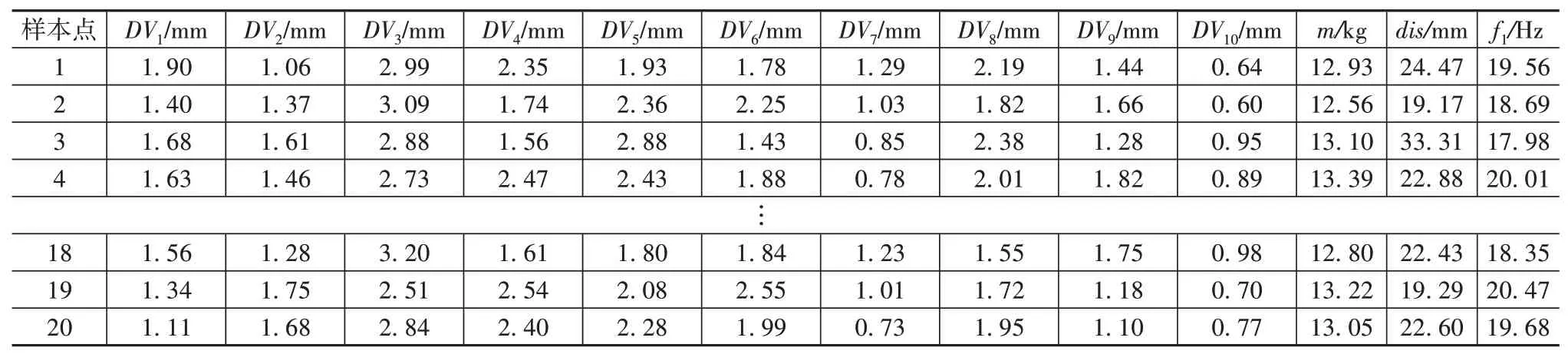
表4 拉丁超立方采集的样本点数据
3.3 近似模型的建立与验证
以座椅质量、1 阶模态频率和滑轨最大变形量作为响应,把样本点的设计变量参数引入原模型中,提交至LS‑DYNA 进行计算,得到各样本点响应的数值。在Hyperstudy 中,根据得到的样本点数据,通过移动最小二乘法(moving least squares method,MLSM)构建近似模型。采用决定系数R2来验证模型的精度。若R2的数值越接近1,则表示近似模型的精度越高,反之模型的精度就越低,一般R2的可接受值不小于0.9。
计算得到座椅质量、滑轨最大变形量和1 阶模态频率的R2值分别为0.999、0.912和0.995,均在允许范围内。由于采用R2来检验精度有一定的偏差,为更好地验证模型精度,将拉丁超立方采样得到的20 个样本点及其响应用来验证模型精度。最终得到的验证结果见图13。由图13 可见,座椅质量和1阶模态频率的仿真值与预测值之间的相对误差较小,能够达到较好的预测结果。对于滑轨最大变形量来说,由于非线性程度较高,虽然有少数样本点的相对误差较大,最大相对误差达到了12%,但总体精度较高,说明近似模型有效。

图13 近似模型误差
3.4 多目标优化结果
对于多目标优化问题,由于目标之间往往是相互冲突或存在无法比较的现象,不可能使各个目标同时达到最优,所以往往需要在各个目标之间进行权衡和折衷处理,使各个目标尽可能满足要求,所以须寻求Pareto 解集。基于构建的MLSM 模型,利用多目标遗传算法(MOGA)进行寻优,获得一系列Pareto 最优解。综合考虑滑轨最大变形量与轻量化,从Pareto解集中选择一个满意解,见图14。
将所选解的参数经过圆整后代入模型中,并提交求解器进行计算,得到的仿真值与预测值相比,最大误差为8.3%,说明近似模型具有较高精度。将最终的优化结果与尺寸优化前的模型进行对比,如表5 所示,最大变形量改善了10.1%,同时实现了轻量化4%,表明寻优结果合理。
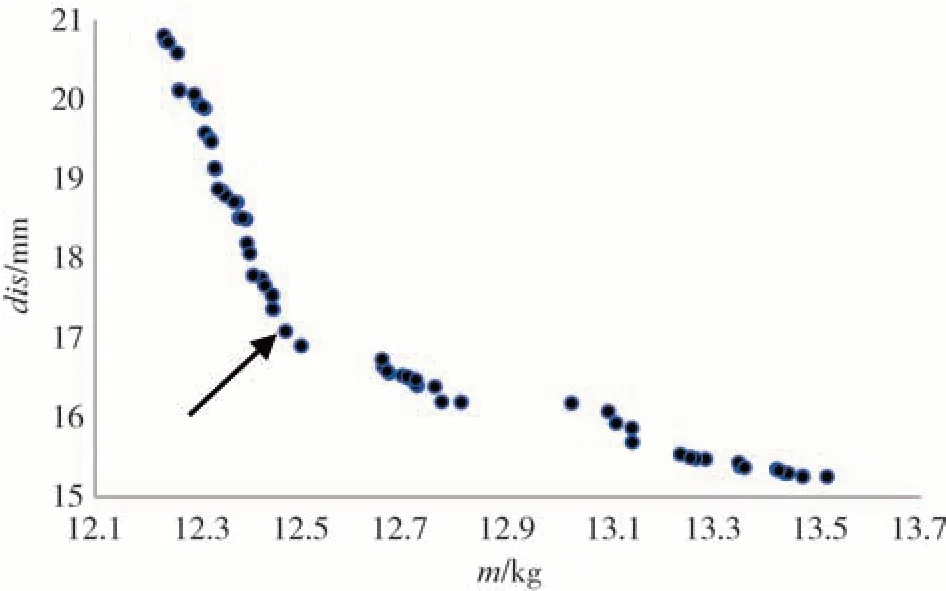
图14 Pareto解集与满意解的选取
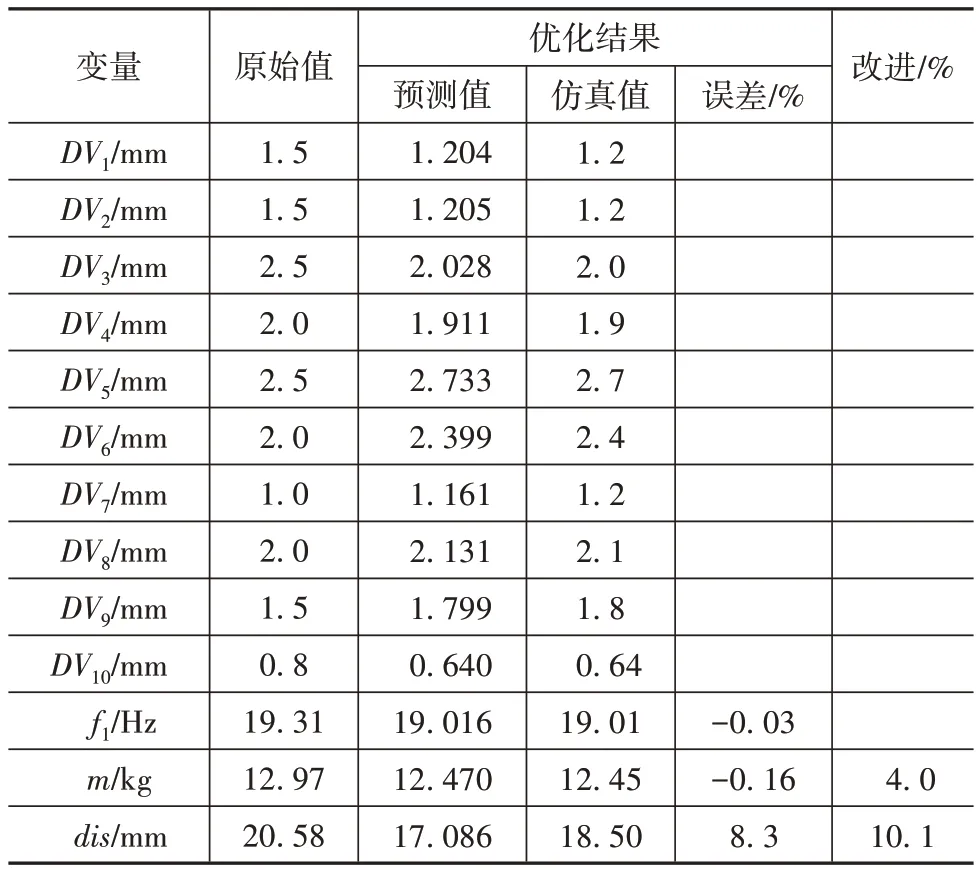
表5 优化前后对比
最终,结合拓扑优化和尺寸优化,在座椅1 阶模态频率不低于19 Hz的情况下,座椅质量减轻0.75 kg,减质量约5.7%,滑轨最大变形量减少3.58 mm,改善16.2%,实现了对座椅的多目标优化设计。
4 结论
针对国标GB14167—2013对汽车座椅拉拽安全性能的要求,在考虑轻量化和结构模态频率情况下,在概念设计和详细设计阶段分别运用拓扑优化和尺寸优化。通过静态载荷简化拉拽座椅的动态载荷,模拟座椅在动态工况下的变形趋势,在静态工况下以结构柔度最小为目标进行拓扑优化,改善了座椅动态拉拽安全性能。随后利用相对灵敏度分析缩减了尺寸优化变量数目,通过近似模型获得了最优解,最终在座椅第1阶模态频率不低于19 Hz的前提下,座椅质量减轻5.7%,滑轨最大变形量减小16.2%,取得了较好的优化效果。
