网联车对抗神经网络跟驰模型*
2021-03-09杨云庆盘朝奉鲁光泉
梁 军,王 军,杨云庆,陈 龙,盘朝奉,鲁光泉
(1. 江苏大学汽车工程研究院,镇江 212013;2. 江苏大学运输服务中心,镇江 212013;3. 北京航空航天大学交通科学与工程学院,北京 100191)
前言
在网联车(connected and autonomous vehicle,CAV)与传统车辆共存的混行交通流场景下,伴随着自动驾驶技术的突飞猛进和CAV 渗透率(指其数量在混合交通流全部车辆中的比例)的不断提高[1],出现了实时性差、车队稳定性不足等问题。因此,混行交通流下CAV跟驰模型成为当前研究热点[2-3]。
目前CAV跟驰模型主要有刺激-反映模型[4]、安全距离模型[5-6]、生理-心理模型[7]和人工智能类模型[8-9]4种。人工智能类模型主要是通过驾驶员的逻辑推理来研究驾驶行为的跟驰模型[10-11],相比于前3种跟驰模型,它具有局部稳定性好[12]、计算时间短和准确率高的特点[13]。张金辉等[14]在混行交通流场景下,通过贝叶斯网络对跟驰过程中前车未来0.1、0.5、1 和2 s 时刻的运动状态进行预测,但该模型计算时间较长,导致跟驰模型准确率较低,对CAV 控制不够精确;郭艳君等[15]利用遗传算法优化了BP神经网络跟驰模型,提高了CAV 跟驰模型的准确率,但模型在混行交通流下仍存在一定的局限性;Ding等[16]将基于 BP 神经网络的 Gipps 模型与 BP 模型耦合,改进了最优加权法的目标函数,建立了线性组合跟驰模型(linear combination car‑following model,LC‑CF),提高了跟驰模型在混行交通流下的适应能力,但对于前车车速变化的实时性较差;Kuefler 等[17]将模仿学习扩展到循环策略的训练中,将驾驶员行为克隆添加进跟驰行为中,提升了混行交通流下跟驰车辆的实时性,但不足的是无法对不良驾驶行为进行识别剔除,存在安全隐患。总的来说,针对混行交通流场景,目前CAV 跟驰模型安全性低、实时性差,在混行交通流场景下存在车队稳定性不足的问题,迫切需要一种计算能力更强、实时性更好的人工智能模型。Zhang等[18]提出生成式对抗网络(generative adversarial nets,GANs),在训练或生成样本的过程中,可以直接通过对生成的样本进行定性和定量评估,实验证明了该框架的稳定性和对数据的计算能力。Reed 等[19]将 GANs 应用在图像识别领域,成功证明了相比于其它神经网络,GANs 的计算能力更强,准确性更高[20-22]。
因此,本文在对混行交通流CAV 跟驰模型实时性、安全性和车队稳定性分析的基础上,利用GANs零和博弈思想和结构稳定、计算能力强的特点,提出GANVFM 模型及其算法,并通过仿真实验加以对比验证。
1 混行交通流中CAV 跟驰行为特性分析
在混行交通流场景下,主要分析CAV和传统车辆对前车速度改变过程中的3种变化情况:(1)跟驰车辆与前车安全距离的变化情况;(2)跟驰车辆对前车速度改变的响应速度和对自车速度的变化情况;(3)跟驰车队的稳定性变化情况。因此,CAV跟驰模型必须兼顾跟驰车辆实时性、安全性和车队的稳定性。
1.1 实时性分析
实时性是指在前车行驶状态发生改变时,跟驰车辆对前车速度变化的响应特性,即要求CAV 跟驰模型在最短时间内调整跟驰状态,故采用均方差作为评价参数[23],即
式中:σα为加速度数据的均方差;σv为速度数据的均方差;an为车队中第n辆车的加速度;vn为车队中第n辆车的速度;N为车队车辆的总数。
1.2 安全性分析
安全性是指车队中任意车辆状态发生改变时,跟驰车辆的安全特性。为保证CAV 在跟驰过程中的安全性,引入追尾预测因子γn作为评价参数:
式中:n为车辆编号;jmax为车辆的最大减速度;D为两车之间的相对车距。γn用于判断追尾事件发生概率,在路面附着系数以及轮胎参数一定的情况下,跟驰车辆间相对车距越大,车辆车速越小,追尾概率越低,追尾预测因子γn越小。γn>1 时,则跟驰车辆有追尾险情,0<γn<1时,则跟驰车辆较为安全。
1.3 车队稳定性分析
车队稳定性指当车队头车速度变化时整个车队行驶状态的变化程度,采用跟驰状态因子φn作为评价参数[24]。
式中T为速度状态改变的时间。φn用于刻画车辆跟驰状态的稳定程度,跟驰车辆速度变化幅度越大,即φn越小跟驰状态和车队稳定性越差;φn越大,车辆跟驰状态越佳,车队稳定性越好。
2 GANVFM模型
为满足跟驰车辆实时性、安全性和车队稳定性的条件,将模型GANVFN 分为生成模型(generator model,GM)和辨别模型(discriminator model,DM)两个模块,以此进一步提高GANVFM的整体运算能力,如图1 所示。CAV 通过车联网和车载雷达同时采集跟驰参数。GM通过提取跟驰参数中跟驰车速vn+1、前车车速vn和相对车距D,通过生成函数计算输出跟驰车辆的加速度αG,最后将其合成新的生成跟驰参数,由DM通过判别函数将其与测试集参数加以辨识,再根据相似度计算结果,反向传导误差从而更新生成函数与辨别函数。

图1 GANVFM模型框架
2.1 GM模块的设计
综合考虑网络结构复杂程度和误差大小选定隐层神经元个数为4,输入神经元个数为3,分别是跟驰车速vn+1、前车车速vn和相对车距D,用矩阵[vn+1,vn,D]表示,输出神经元为跟驰生成加速度αG,输入层与隐藏层之间进行全连接。每组GM的跟驰参数[vn+1,vn,D]随着时间t变化而变化,根据时间状态的改变,将其记作St,把每组由生成加速度函数模拟生成的参数 (S,α) 记录进生成数据库χμ,其中χμ={(S1,α1),(S2,α2),(S3,α3),…,(St,αt)},同时将采集的每组测试集的跟驰车速、前车车速、相对车距和跟驰加速度参数[vn+1,vn,D;αT]记录进测试集跟驰数据库χE。GM目标函数是为使生成加速度αG与真实加速度αT更为相似,即要求两者差异越小越好,目标函数为

为衡量上述目标函数中两参数的差异性,引入JS散度对其进行评价。JS散度具有对称性和非负性特点[25-26],GM训练效果越好,αG和αT的相似度越高,差异性越小,GM 的损失函数越接近于αG和αT分布的JS 散度,当两者分布相等时,其散度恰好为0。JS散度的生成加速度函数为
生成加速度函数的参数自适应更新函数为

2.2 DM模块的设计
Dλ(S,α)为DM 判别器,为判别出该组跟驰数据是否由GM生成,DM目标函数为

DM 将来自真实加速度数据标记为1,而将生成加速度函数数据标记为0,鉴别函数的更新过程类似于sigmoid的二分类[27],鉴别函数的代价函数为

判断函数的参数自适应更新函数为

GANVFM 通过车联网和雷达传感器采集跟驰参数,将跟驰参数[vn+1,vn,D]通过生成函数训练输出生成加速度αG,同时将GM 中跟驰模型的输入和输出参数合成为跟驰模型生成参数[vn+1,vn,D;αG];然 后 将 [vn+1,vn,D;αG] 与 跟 驰 模 型 参 数[vn+1,vn,D;αT]通过辨别函数进行辨别,提取对应的加速度参数[αG,αT]对其进行相似度计算,其中为避免GANVFM 模型崩溃,采用0.5作为η的阈值,使 GM 和 DM 更新的几率相等。若η<0.5,生成加速度与实际加速度差异小,则对DM 判别器要求更高,须通过更新函数更新DM,以提高对生成参数的辨别性;若η>0.5,则证明GM 生成加速度不符合实际加速度,即两参数差异较大,须通过更新函数更新GM;若η=0.5,则证明GM与DM达成平衡。
3 实验
3.1 实验说明
利用自建的驾驶员在环半实物仿真平台,设置CAV 和传统车辆混行交通流场景,通过PreScan/Simulink 软件平台仿真模拟V2X 通信和雷达传感器[28-29],并由Simulink存储所采集的跟驰参数和执行对仿真车辆的控制。选取驾龄1 年以上的男女驾驶员各10 名作为实验员,通过设定不同的前后车速、相对车距和交通场景下渗透率比例来采集跟驰数据。设定跟驰加速度采集频率为2 Hz。
通过Simulink 将采集的数据导出,数据经过筛选共选择10 000条,从中选取9 250条作为训练集数据进行训练,选取750 条作为测试集数据进行测试验证。GANVFM 的生成函数模型以及辨别函数模型在迭代100 代以后平稳,整个模型趋于稳定。与测试集输出对比结果表明,GANVFM 模型预测的跟驰加速度αG在测试集数据的准确率为95.3%,见图2。
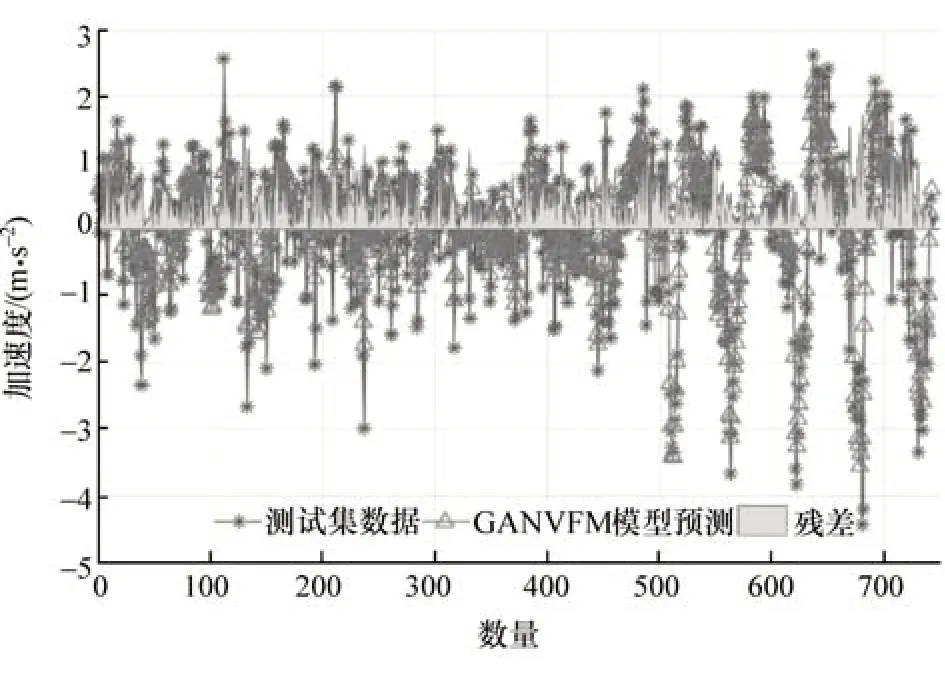
图2 实际加速度与预测加速度对比
3.2 实时性验证
随机抽取前15 s 跟驰过程中的加速度参数,同时将GANVFM 预测的跟驰加速度与实验跟驰加速度、BP 跟驰加速度和LC‑CF 跟驰加速度进行对比,结果如图3所示。
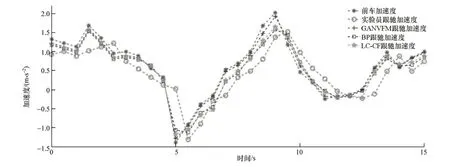
图3 跟驰加速度对比
采用式(1)计算σα,得到σα-实验员=0.4903σα-BP=0.1894,σα-LCCF=0.1506,σα-GANVFM=0.1491。 可 见 ,GANVFM 对前车加速度变化的反应最快,实时性最优。
3.3 安全性验证
随机抽取前120 s 的跟驰过程中的跟驰车速参数,将 GANVFM 与 BP 模型、LC-CF 模型和实验员的跟驰车速进行对比,结果如图4所示。

图4 车速轨迹对比
分别用式(2)和式(3)计算σv和γn,结果如表1所示。表明实验员控制的车辆对前车车速变化的响应最慢,相比于其他模型,GANVFM 的σv和γn都最小。说明GANVFM控制最及时准确,安全性最佳。
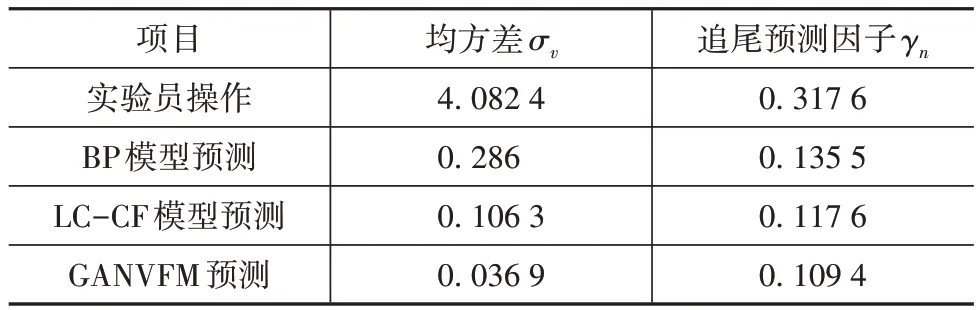
表1 跟驰车速数据对比
3.4 车队稳定性验证
选取9 辆车Cn(n=1,2,3,4,…,8,9)组成车队。在单车道对GANVFM 进行研究。车队第1辆车记为头车C1,对其驾驶行为采用标准工况,包含加速、减速和匀速阶段,为验证不同渗透率下车队的跟驰状态,保持C1的运动工况始终不变。同时设定车队中既有传统车辆,又有搭载GANVFM 的CAV,记为GANVFM‑CAV。实验分为3组,分别选取GANVFM‑CAV 渗透率δ为50%、37.5%和25%。实验A 选取δ为 50%,选取C2、C3、C8、C9为 GANVFM‑CAV,C4、C5、C6、C7为传统车辆,截取前30 s 车辆速度数据,结果如图5所示。
同时,随机选取a(t=10 s)、b(t=18 s)、c(t=25 s)3个节点,采集3个节点跟驰车辆与前车的相对车距D和跟驰速度vn+1,如表2所示。计算GANVFM‑CAV平均相对车距D1和传统车辆平均相对车距D2,得到D1=15.73 m,D2=19.93 m,在δ为50%时GANVFM-CAV车队长度平均比传统车辆队列长度缩短比例ξ约为21.1%。

图5 渗透率50%的实验结果

表2 50%渗透率时CAV与传统车辆相对车距和速度的对比
实验 B 选取δ为 37.5%,选取C3、C4、C8为 CAV,C2、C5、C6、C7、C9为传统车辆,截取前 30 s 车辆速度数据,结果如图6所示。
随机选取a(t=11 s)、b(t=19.5 s)、c(t=27 s)3 个节点,采集3个节点跟驰车辆与前车的D和vn+1,如表3 所示。计算得到D1=15.52 m,D2=19.03 m,说明在δ为37.5%时GANVFM-CAV 车队长度平均比传统车辆队列约缩短18.4%。
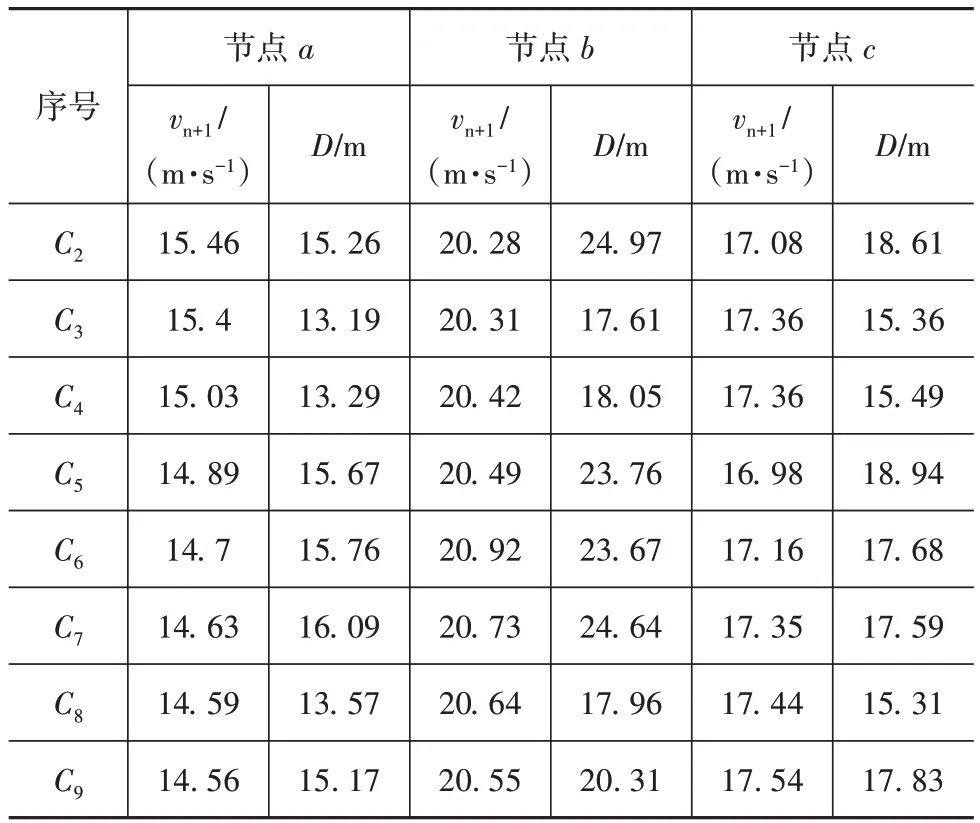
表3 37.5%渗透率时CAV与传统车辆相对车距和速度的对比
实验 C 选取δ为 25%,选取C3、C4为 CAV,C2、C5、C6、C7、C8、C9为传统车辆,截取前30 s车辆速度数据,结果如图7所示。
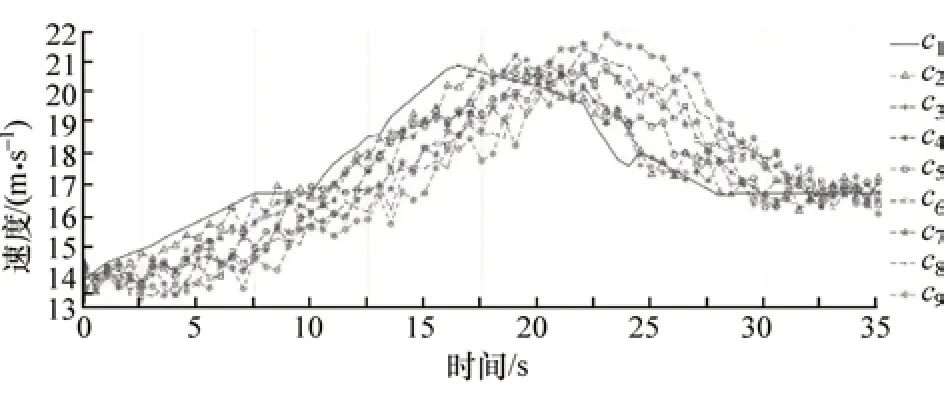
图7 渗透率25%的实验结果
随机选取a(t=13 s)、b(t=18 s)、c(t=26 s)3 个节点,采集3 个节点跟驰车辆与前车的D和vn+1,如表4 所示。算得D1=18.48 m,D2=21.74 m,说明在δ为25%时GANVFM-CAV 车队长度平均比传统车辆队列约缩短15%。
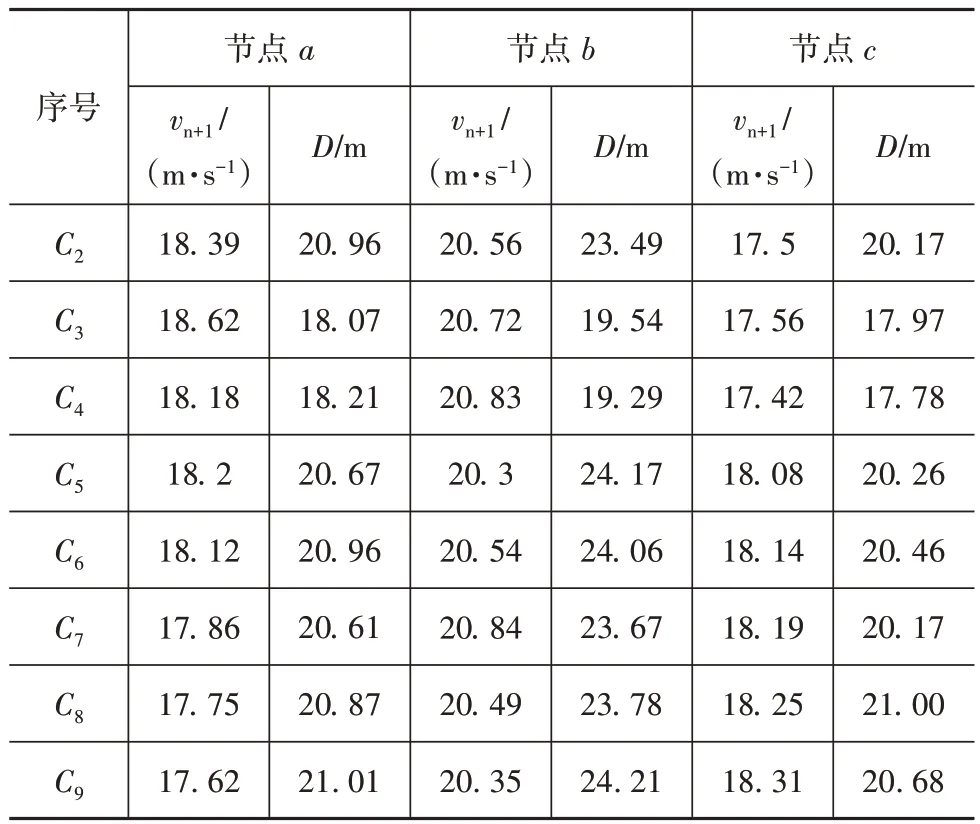
表4 25%渗透率时CAV与传统车辆相对车距和速度的对比
通过3 组不同渗透率的实验可知,相比于传统车辆队列,GANVFM-CAV 车队长度大幅度缩减,当δ为50%时车队约缩短22.1%。接着计算3 种渗透率下的γn和φn,结果如表5所示。
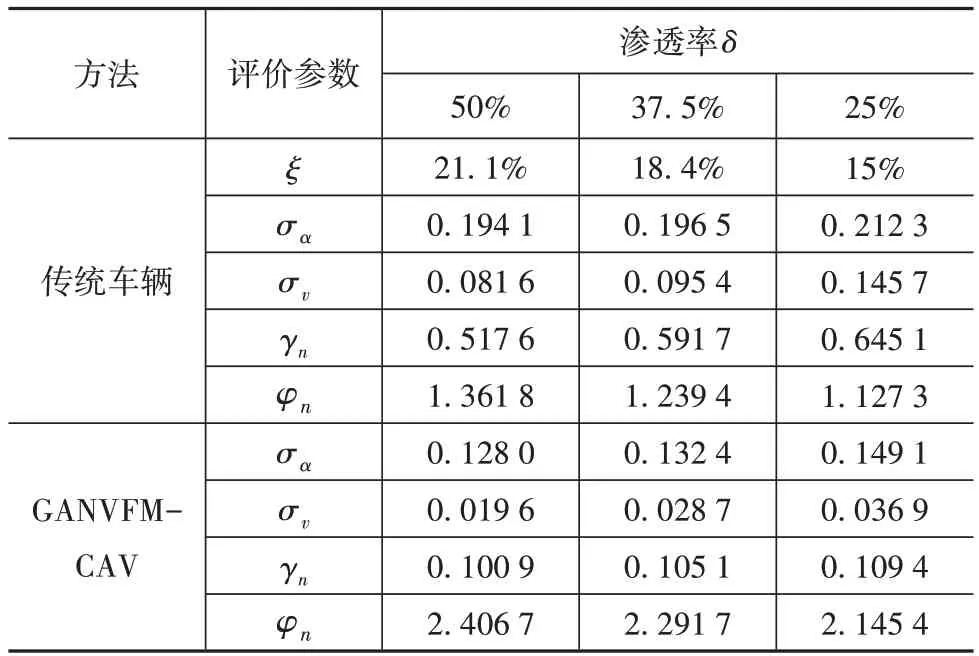
表5 车队评价参数
由表5 可见,与传统车辆相比,GANVFM-CAV的γn更小,φn更大,体现出GANVFM 的实时性更好,安全性和车队稳定性更高。另外随着渗透率δ的提高,γn越小,φn和ξ越大。说明 GANVFM-CAV 对混行交通流车队跟驰稳定性有显著提高,可以极大提高道路通行能力,缓解交通压力。
4 结论
(1)针对当前CAV 和传统车辆混行的交通场景下,CAV对前方车辆速度变化反应响应速度、跟驰车辆安全性和车队稳定性较差的交通特性,提出了GANVFM 模型及其算法。实验表明,GANVFM 在测试集上的准确率为95.3%。通过与其他模型对比得出,GANVFM 对前车车速改变的响应速度最快,实时性最好,追尾预测因子最小,安全性最优。
(2)对混行交通流中GANVFM-CAV 不同渗透率下的车队稳定性进行实验研究。实验结果表明,渗透率越高的车队,GANVFM 对车队跟驰控制的适应性越好,车队长度越短,车队稳定性越高。因此GANVFM 可以极大提高混行交通流场景下CAV 车辆的实时性、安全性和车队的稳定性,极大提高道路通行能力,缓解交通压力,对自动驾驶技术的发展具有重要应用价值。
(3)下一阶段将对本文提出的GANVFM 模型在大规模路网中考虑网联汽车、非网联汽车、非机动车和行人穿行的复杂混行交通场景下的适应性进行研究。
