磁阻式接近传感器原理及特性研究*
2021-03-07郑庆霖杨炼卿赵子豪赵长春樊振军
郑庆霖,杨炼卿,赵子豪,赵长春,樊振军†
(1.中国地质大学(北京)工程技术学院,北京 100083;2.中国地质大学(北京)数理学院,北京 100083)
1 引言
接近传感器作为一种将物体移动信号转化为电信号的装置,广泛应用于机械制造、交通运输等领域,可实现限位、计数及自动保护等功能。目前接近传感器多是基于电感、电容及光电基本原理构建,虽然实现了物体移动信号的转化,但仍存在对电源要求较高、环境适应能力较差等局限性。磁阻式传感器不仅可以克服上述缺点,且具有体积小、维护成本低、可以在无电源条件下实现物体位移信号到电信号的转化等优势[1-3]。目前磁阻式传感器多用于转速测定、角度测量等方面[4-10],对其在测量接近物体速度、位移等方面的适用性缺乏深入研究。基于此,本文构建了简易磁阻式接近传感器,通过模拟仿真与实验对其感应范围、线性度及灵敏度等特性进行研究,并基于研究结果对其适用性展开讨论。
2 原理分析
磁阻式传感器主要由多匝线圈和永磁体组成。目前,对于磁阻式传感器原理的解释多为“待测物与传感器间距的变化使磁路中的磁阻发生变化,导致磁通量的增减,进而产生感应电动势”[11,12],但该解释仍需细化与完善。首先,铁磁质物体接近时由于其磁阻远小于空气,而磁感线会优先选择磁阻小的路径,因此会向铁磁质物体“收拢”(如图1、图2 所示),导致永磁体磁场的重新分布,使多匝线圈内的全磁通发生变化,进而产生感应电动势。其次,导致多匝线圈内全磁通变化的不仅仅是上述原因,铁磁质物体在接近过程中会被磁化,产生磁场,该磁场随着物体的接近也会导致多匝线圈内全磁通的变化。
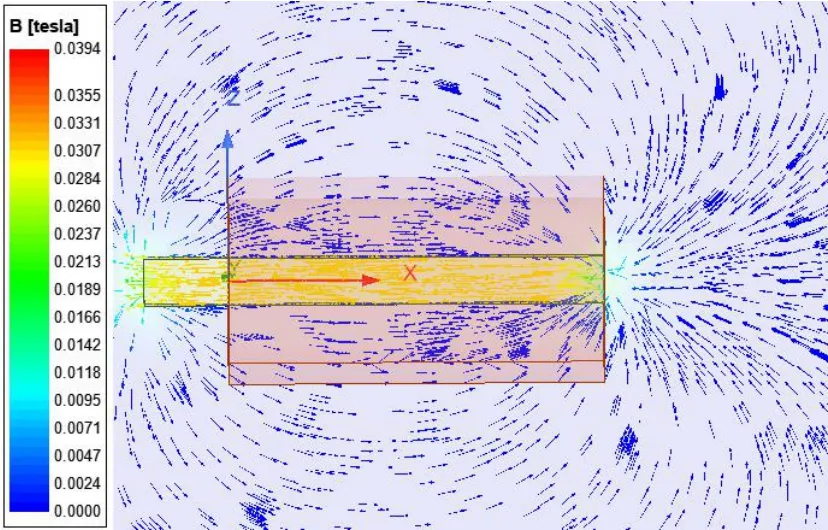
图1 物体接近前永磁体磁场分布

图2 物体接近后永磁体磁场分布

由法拉第电磁感应定律(式1)可知,全磁通的变化会使线圈内产生感应电动势,将检测器连接线圈,便可通过对电信号的检测感应物体的接近。
3 实验
3.1 实验装置
本实验使用装置包括磁阻式传感器、气垫导轨、气泵、滑块(非铁磁质)、弹射器、光电门、数字计时器、放大器、DS1072U示波器、橡皮泥、接近物体(长5 cm、直径1 cm的铁、镍、铝、铜圆柱体)。该传感器由测量变化器和检测器组成:测量变化器为一螺线管及固定于螺线管内的矩形永磁体;检测器为DS1072U示波器;将传感器和弹射器分别固定于气垫导轨两端;接近物体固定于滑块上,实验时推动滑块,使其匀速接近传感器;光电门固定于气垫导轨50 cm和110 cm刻度处,并连接数字计时器;放大器输入端连接螺线管接线柱,放大螺线管内产生的电信号;示波器连接放大器输出端,显示物体接近过程中的电压变化。实验装置如图3所示:

图3 实验装置图
3.2 实验方案
3.2.1 接近速度与感应电动势
研究接近速度与感应电动势关系的实验方案:(1)打开气泵,使滑块接近传感器,验证滑块接近是否会使螺线管内产生感应电动势。(2)将小铁棒固定于滑块上距端部1 cm处。(3)推动滑块,使其接近传感器。(4)观察接近物体通过两个光电门的时间:若相同,则接近物体为匀速运动状态,记录电压变化量,并以不同的速度进行若干组;若不同,则调节气泵功率,重复以上操作直至通过两个光电门时间相同。(5)将小铁棒分别固定于滑块上距端部1.5 cm、2 cm处,重复步骤3至步骤4,记录数据。
3.2.2 物体材质与感应电动势
研究物体材质与感应电动势关系的实验方案:(1)将小铁棒固定于滑块上距端部1 cm处。(2)使用弹射器赋予滑块与小铁棒固定的初速度。(3)观察接近物体通过两个光电门的时间,若相同,则接近物体为匀速运动状态,记录螺线管内的电流变化量,重复步骤2至步骤3七次,并计算其平均电流变化量;若不同,则调节气泵功率,重复以上操作直至通过两个光电门时间相同。(4)将小铁棒分别固定于滑块上距端部1.5 cm、2 cm、2.5 cm处,重复步骤2至步骤3。(5)将小铁棒依次更换为小镍棒、小铝棒、小铜棒,重复步骤2至步骤4,记录数据。
4 实验结果与分析
4.1 铁磁质物体磁化
为验证铁磁质物体因磁化而产生的附加磁场的影响不可忽略,本文将螺线管内的永磁体取出,使用被该永磁体磁化的镍棒接近空螺线管至0.5 cm、1 cm 处,测试如表1 所示。
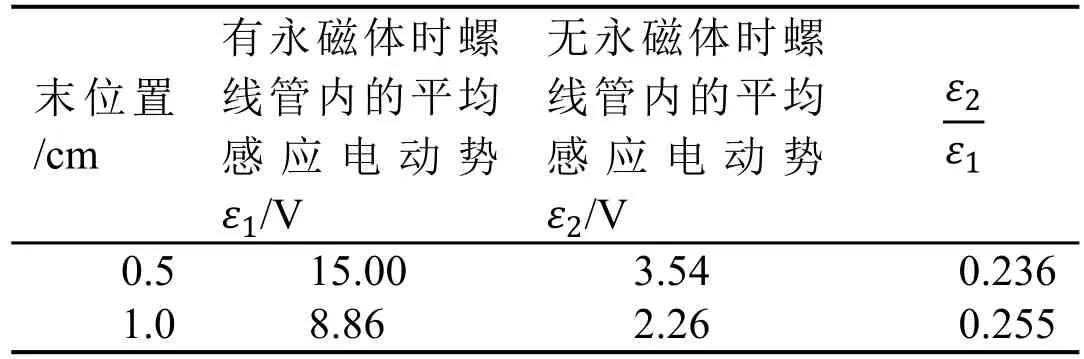
表1 感应电动势的测量值
由测试数据可以看出,当磁化后的物体接近空线圈时,其磁场变化导致线圈产生的感应电动势最低占有永久磁铁线圈感应电动势23.6%。分析认为:根据铁磁质物体的磁滞现象[13],接近空螺线管时铁磁质物体磁感应强度为剩余磁感应强度。而当其接近有永磁体的螺线管时,受到永磁体的影响,磁感应强度远大于剩余磁感应强度,因此实际占比应大于23.6%;相同外场中,磁导率越大的铁磁质物体磁化后产生的磁感应强度越大,而镍在常用铁磁质中磁导率较小,故大部分铁磁质物体接近过程中附加磁场的影响较镍大。综上,小体积铁磁质物体在接近过程中其附加磁场所导致的磁通变化量不可忽略。
4.2 接近速度与感应电动势
使用ANSYS Maxwell 有限元分析软件对小铁棒的接近过程进行仿真求解,小铁棒初位置与末位置分别距传感器4 cm 与1 cm,并以四组不同的速度接近传感器,仿真求解结果如图4 所示:
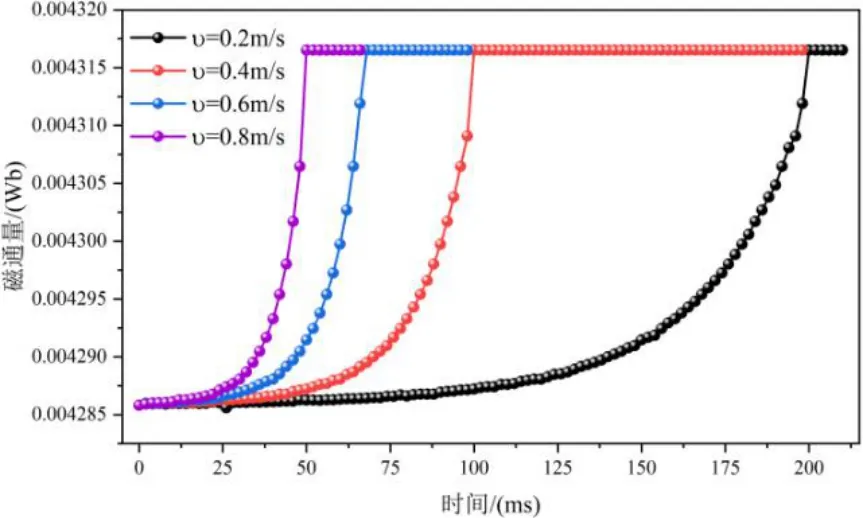
图4 接近过程中的全磁通变化量
由于螺线管内产生的感应电动势信号峰值出现时间极短,而仿真软件解算时间步长较大,解算点易错过峰值而导致误差,故采用螺线管内的全磁通变化量图像进行分析;由于永磁体磁场参数及接近物体的磁导率难以精确测定,因此难以在仿真模型中完全还原实际情况,易导致较大误差,故仅作定性分析。由图4 可知,小铁棒以四组速度接近传感器时螺线管内的全磁通变化量均相同。因此,固定初位置与末位置时小铁棒接近所导致的全磁通变化量为一定值。将所得结论代入式2 进行分析:

由于接近过程时间较短,故使用全磁通平均变化率近似代替瞬时变化率的积分,使分式上下同乘小铁棒的运动距离x=4,由于全磁通变化量与速度无关,故K为一定值,因此感应电动势应与接近速度呈线性关系。
此外,本文构建了简易磁阻式传感器,并通过前述实验方案进一步分析(示波器采集点间间隔小,故实验时可用其采集电压峰值)。
由图5 可知:当d 小于等于1.5 cm(d 为物体末位置与传感器的距离)时感应电动势与接近速度呈线性关系,且拟合度均大于0.95,但三组数据拟合直线均存在一定的截距这是由于接近过程中小铁棒受永磁体磁场的影响产生加速度,而光电门所测速度为小铁棒在气垫导轨上运动的平均速度,因此其实际的接近速度较平均速度大(仿真模拟中小铁棒为匀速运动),导致拟合直线存在正截距,同时也会影响斜率和拟合度,但拟合结果表明在该速度区间内线性拟合度仍较好当d=2 cm 时拟合度较低,是由于此时物体末位置距传感器较远,接近过程中产生的感应电动势较小,受仪器误差影响较大拟合直线截距随末位置的远离而减小。分析认为:其一是由于物体末位置距传感器越远,其受永磁体外场影响越小,接近时产生的速度增量越小,因此接近过程中产生的感应电动势也越小;其二是由于物体末状态距传感器越远,其接近导致的全磁通变化量越小,因此接近过程中产生的感应电动势也越小。

图5 接近速度与感应电动势
4.3 物体材质与感应电动势
改变仿真模型中接近物体的材质,使其以相同速度从同一初位置接近至同一末位置,仿真求解结果如下:
由图6 可知铁质物体接近时所导致的全磁通变化量比镍质物体大,但两者十分接近;而铜、铝质物体接近时导致的全磁通变化量极小。这是由于铁、镍均为铁磁质,其相对磁导率远大于空气(表2),在其接近过程中引起磁感线重新分布的能力较强,自身被磁化后产生的磁场也较强,因此会导致较大的全磁通变化量;而铜、铝分别为抗磁质和顺磁质,其相对磁导率与空气十分接近,故接近过程中只会导致极小的全磁通变化。

图6 不同材质接近物体的感应电动势

表2 材料相对磁导率
根据前述方案进行试验,结果如图7 所示。铁棒接近时螺线管内产生的感应电动势大于镍棒,铜棒和铝棒接近时螺线管内产生的感应电动势极小,与仿真模拟结果相符。因此,与空气磁导率相差越大的物体接近时螺线管内产生的感应电动势越大,而与空气磁导率相近的物体无法被探测到,故该传感器仅适用于感知铁磁质物体的接近。四组实验中物体以相同速度接近传感器所产生的感应电动势波动均较小,但当物体末位置距传感器较远时,由于其感应电动势本身较小,因此波动所占比例较大,这也导致了末位置较远时感应电动势与接近速度的线性拟合度较差。
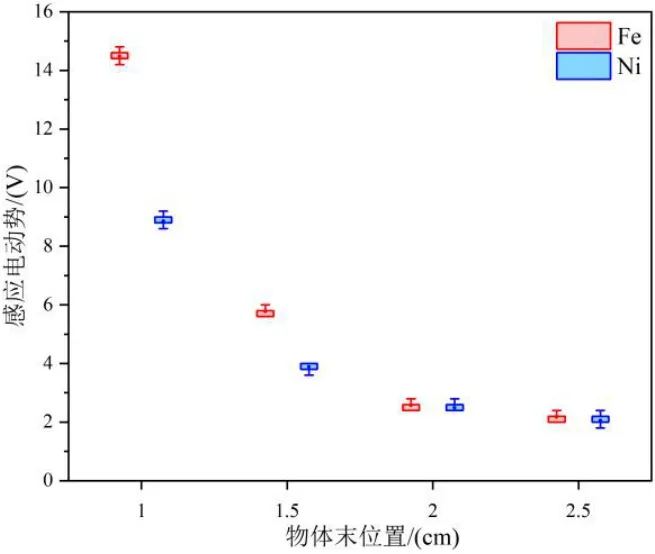
图7 物体材质与感应电动势
4.4 传感器线性度
线性度是指测量装置输入、输出之间的关系与理想直线关系的偏离程度。线性度好则说明输入信号与输出信号关系简单,偏差较小,对传感器输出信号的处理分析十分有利;反之则说明输入信号与输出信号关系复杂,偏差较大,不利于输出信号的后续处理。其计算公式如下:

式中∆max为输出信号与拟合数值的最大差值,Ymax与Ymin分别为输出信号的最大值与最小值。为探究该传感器对于不同信号的线性度,笔者基于前述实验进行计算分析:
由表3 可知,当速度为输入信号,感应电动势为输出信号时线性度较好,因此接近速度与感应电动势之间为线性关系且偏差较小;而当d=2cm 时线性度较差,这是由于末位置距传感器较远,所产生的感应电动势较小,仪器误差或环境扰动所导致的波动占比较大,因此线性度较差;当位移为输入信号,感应电动势为输出信号时线性度较差,故物体位移与感应电动势之间关系复杂。综上,该传感器适用于测定匀速直线运动物体的速度,但物体运动路径中距传感器的最小距离应控制在一定范围之内;该传感器不适用于测定接近物体的位移。

表3 不同输入/输出的线性度
4.5 传感器灵敏度
灵敏度为单位输入变化所引起的输出变化,通常用理想直线的斜率来表征传感器的灵敏度。基于前部分结论,该传感器适用于测定物体的接近速度,因此本文以接近速度为输入,感应电动势为输出计算该传感器的灵敏度。
由表4 可知,该传感器灵敏度随物体末位置与传感器间距的减小而增大,实际应用中可根据不同的灵敏度需求调整末位置。
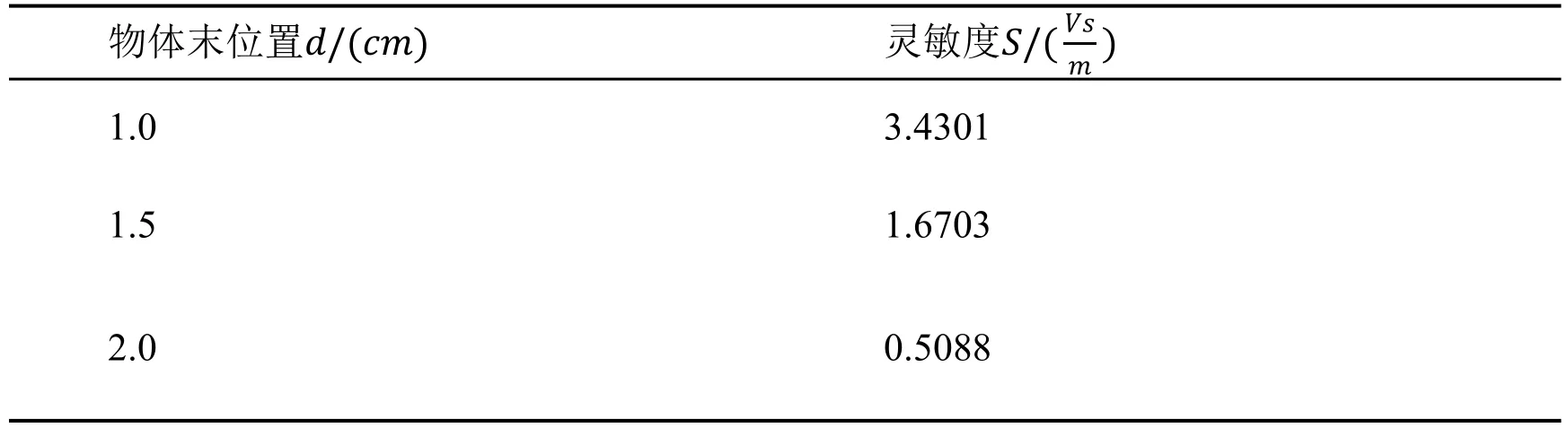
表4 传感器灵敏度
5 结论
本论文通过有限元仿真与实验的方法对磁阻式传感器的原理及特性进行研究,得出结论如下:
(1)磁阻式传感器线圈内产生感应电动势是由两部分原因导致:其一为铁磁质物体接近螺线管时会使永磁体磁场重新分布,导致多匝线圈内的全磁通发生变化,进而产生感应电动势;其二是铁磁质物体接近过程中被磁化,产生磁场,该磁场也会导致线圈内全磁通的变化,进而产生感应电动势。
(2)相同条件下物体接近速度越大,该传感器内产生的感应电动势越大,且接近速度为输入信号、感应电动势为输出信号时传感器线性度良好;相同条件下接近物体的磁导率与空气差值越大,该传感器所产生的感应电动势越大。
(3)该传感器适用于测定匀速直线运动物体的速度,但物体运动路径中距传感器的最小距离应控制在一定范围之内,但它不适用于测定物体位移。
