基于自适应模糊的汽车半主动悬架容错控制
2021-03-05姚行艳
姚行艳
(重庆工商大学计算机科学与信息工程学院,重庆400067)
1 引言
汽车半主动悬架是安装在车身与车轮之间缓冲并衰减来自路面给车轮冲击性的垂向反力的一种装置,以保证汽车的乘坐舒适性和操纵稳定性[1-3]。当汽车半主动悬架系统的阻尼器发生故障时,基于传统控制理论设计的控制算法没有考虑系统潜在的故障,也没有设计故障发生时相应的处理措施,阻尼器一旦发生故障,将会造成控制器输出紊乱,达不到期望控制效果,严重影响汽车的乘坐舒适性和操纵稳定性[4-5]。容错控制是对控制系统可能出现的故障情况采取控制方法,使控制系统性能指标在完好无故障或故障情况下均能满足要求[6-7]。文献[8]提出滑模观测器诊断汽车悬架故障,加入容错控制后的控制器获得了接近无故障系统的控制性能。文献[9]以最小化故障对乘坐舒适性与车辆操纵性的影响为容错目标,通过正常阻尼器对故障阻尼器所损失阻尼力进行补偿并采用线性变参数控制算法计算各阻尼器的期望输出力值。文献[10]针对状态不可测的汽车半主动悬架系统的阻尼器发生故障的情况,用自适应模糊观测器来估计不可测的状态量,并研发了一种自适应模糊容错控制器对阻尼器故障进行仿真分析。文献[11]使用Kalman 滤波器对状态和故障增益系数进行估计,进行状态重构,在实现阻尼器故障的检测和诊断的基础上设计了自适应滑模容错控制算法。文献[12]通过故障在线诊断获取阻尼器故障增益估计值,调整最优控制器参数进行控制律重组。文献[20]设计了H∞控制器作为汽车半主动悬架无故障下的控制器,在阻尼器常见的几种故障模式进行仿真和试验验证。结果表明,所提出的主动容错控制策略可使故障悬架性能经短暂时滞后恢复至与正常悬架性能相接近的水平。
2 汽车半主动悬架系统模型
2.1 2 自由度1/4 汽车悬架模型
将汽车半主动悬架系统简化为单个车轮运动,忽略车身两侧车轮的相互作用,将汽车半主动悬架系统简化为2 自由度1/4汽车悬架模型,如图1 所示。

图1 2 自由度1/4 汽车悬架模型Fig.1 Quarter Semi-Suspension Model
得到汽车半主动悬架系统的动力学方程:

将动力学方程转换成系统状态空间方程:

式中:ks、kt—悬架刚度和轮胎的刚度;xr—路面的输入;xu、xs—车轮和车架的绝对位移;Fmr—阻尼器的可调阻尼力。
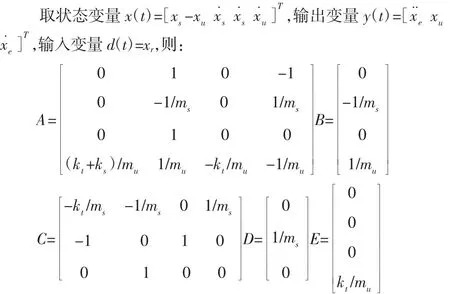
汽车半主动悬架系统的一些参数值参考某汽车悬架参数,其中ms=40kg,mu=490kg,ks=16000N/m,kt=238000N/m。代入这些悬架参数可得系统状态空间方程的系数矩阵。
2.2 随机路面输入模型
定义路面相对基准平面的位移为xr,可得到随机路面输入模型[11]:

式中:n—空间频率,单位为m-1;
n0—参考空间频率,n0=0.1m-1;
Gq(n0)—参考空间频率的路面谱值,单位为m2/m-1;
w—频率指数。
3 自适应模糊控制器
固定输入、输出论域在复杂系统运动过程中的模糊控制性能具有很大的局限性。自适应模糊控制的输入、输出变量可根据系统运动过程进行在线调整,可用于汽车半主动悬架系统控制。
3.1 量化因子和比例因子
在模糊控制器中,PB、PM、PS、ZE、NS、NM 和NB 分别代表正大、正中、正小、零、负小、负中和负大。针对2 自由度1/4 汽车半主动悬架模型,将车身加速度、相对速度作为模糊控制器的输入,阻尼器的可调阻尼力作为模糊控制器的输出,其实际范围称为输入变量和输出变量的基本论域:[-e,e],[-ec,ec],[-u,u]。取相对速度的模糊论域X={-n,-n+1,…,0,…,n-1,n},其中,n 是相对速度在[0,e]范围内量化后分成的档数且e≠n。定义量化因子ke=n/e。基本论域[-e,e]随着量化因子ke的变化进行缩小和放大,从而改变相对速度的控制灵敏度。同理,选定车身加速度的量化档数为m,量化因子kc=m/ec。基于量化因子的概念,设阻尼器的可调阻尼力的量化挡数为l,定义比例因子ku=u/l。
3.2 模糊控制规则和量化因子
根据所建立的2 自由度1/4 汽车半主动悬架模型得到的模糊控制器的控制规则,如表1 所示。
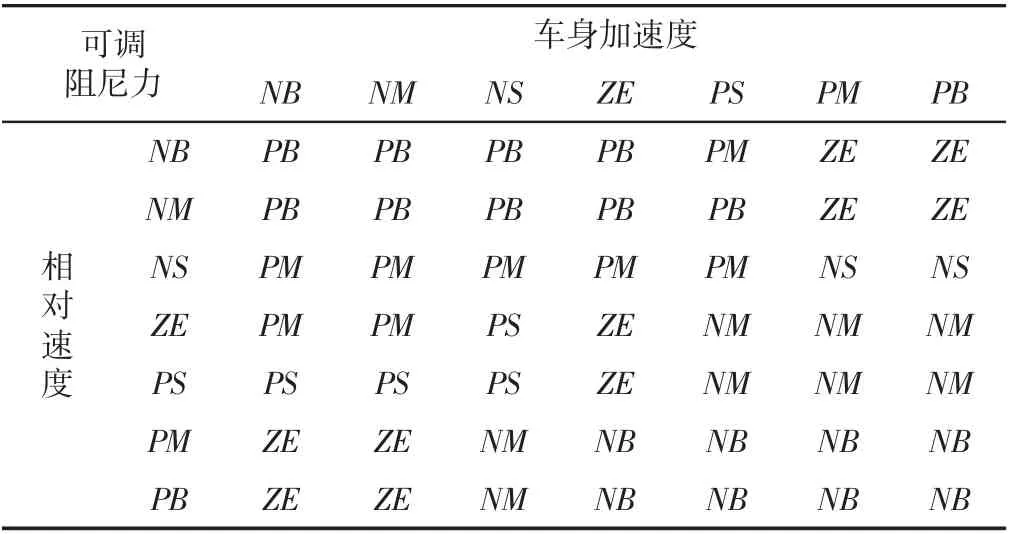
表1 模糊控制器的控制规则Tab.1 Fuzzy Controller Control Rules
设X1=[-e,e],X2=[-ec,ec]分别为相对速度和车身加速度的初始论域,Y=[-u,u]为阻尼器的可调阻尼力的初始论域。自适应模糊控制的论域X1,X2与Y 随着输入变量x1、x2与输出变量y 的变化进行自适应调节:

式中:α1(x1)、α2(x2)、β(y)—论域伸缩因子。
其中,其中输入变量的论域伸缩因子[13]α(x)=1-λe-kx2。其中,x 为输入变量,λ 为伸缩因子系数,k 为伸缩因子指数系数。输出变量的论域伸缩因子为式(6)。ki为伸缩因子的积分常数,Pi为权重常数向量,β(0)为初值1。

根据所建立的2 自由度1/4 汽车悬架模型,设计自适应模糊控制器对输入和输出论域的自适应调节,如图2 所示。进而实现对可调阻尼力的精确控制。自适应模糊控制器输入变量的论域伸缩因子的模糊控制原则为[14]:(1)输入变量车身加速度或相对速度较大时,其论域保持不变;(2)车身加速度或相对速度较小时,车身加速度或相对速度的论域缩小。自适应模糊控制器输出变量的论域伸缩因子的模糊控制原则为:(1)车身加速度和相对速度较大且方向相同时,可调阻尼力的论域扩大;(2)车身加速度和相对速度较大且方向相反时,可调阻尼力的论域缩小。
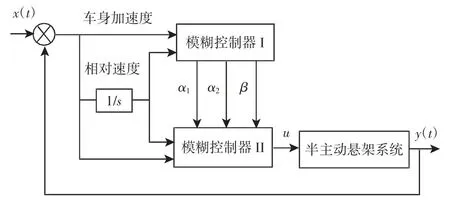
图2 自适应模糊控制器结构Fig.2 Structure of Adaptive Fuzzy Controller
模糊控制器I 的输入变量车身加速度和相对速度的基本论域均取为[-1,1],采用7 个模糊语言集合{NB,M,S,E,S,PM,PB},输出变量α1、α2和β 的基本论域均为[0,1],输出变量α1和α2采用7 个模糊语言集合{ZE,S,M,B,M,S,ZE},而输出变量β 采用7 个模糊语言集合{ZE,VS,S,SB,M,B,VB},输入和输出变量的论域伸缩因子的模糊控制规则,如表2、表3 所示。

表2 输入变量的论域伸缩因子模糊控制规则Tab.2 Variable Domain Fuzzy Control Rules for Input Variables

表3 输入变量的论域伸缩因子模糊控制规则Tab.3 Variable Domain Fuzzy Control Rules for Output Variables
根据汽车半主动悬架系统所提供的相对速度和车身加速度,可以得出模糊控制器I 的论域伸缩因子α1、α2和β。根据汽车半主动悬架系统所提供的相对速度和车身加速度的大小以及模糊控制器I 得到的论域伸缩因子,模糊控制器II 可自适应调节其输入和输出论域的大小,进而实现汽车半主动悬架的自适应模糊控制。
3.3 容错控制器设计
当阻尼器发生增益变化故障时,建立如下故障模型,设阻尼器发生故障时输出为uf(t)=δu(t)。u(t)为无故障时阻尼器输出力;δ 为阻尼器故障增益系数。为方便对阻尼器进行故障分析,令阻尼器故障Fa(t)=(δ-1)u(t),则阻尼器故障输出uf(t)=u(t)+Fa(t)。
当阻尼器发生故障时,系统控制输出异常,通过未知输入观测器可以观测出系统输出误差将不为零,即可判断出系统发生故障。根据阻尼器故障增益uf(t)=δu(t)。δ<1 为汽车半主动悬架系统阻尼器发生故障,此时uf(t)将小于u(t),阻尼器输出力值达不到控制器期望力值,因此控制系统性能会受到一定影响。对此,建立以下故障补偿容错控制策略。

通过对无故障控制器输出期望阻尼力进行补偿,故障阻尼器可输出无故障时的控制器的输出期望阻尼力,从而消除阻尼器故障对系统性能的影响,此时悬架系统将维持系统在无故障情形下的性能。当故障增益系数δ、Fsat与u(t)满足式(8)时,此时容错控制下的阻尼器输出力值将小于无故障控制器输出的阻尼器期望力值,系统性能将会降低。否则,在故障发生时可以通过故障补偿来维持系统性能。据此,提出如下容错控制算法:
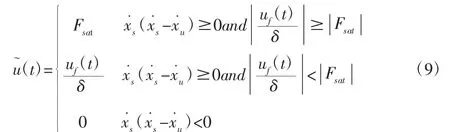
式中:uf(t)—阻尼器理想控制力(t)—控制器输出期望阻尼力值。
在Simulink 建立的汽车半主动悬架容错控制模型,如图3所示。

图3 汽车半主动悬架容错控制Fig.3 Vehicle Semi-Active Suspension Fault-Tolerant Control
4 路面仿真与结果分析
在Matlab/Simulink 中搭建自适应模糊控制器的各模块,组成汽车半主动悬架自适应模糊控制系统,并进行仿真与分析。假定汽车在C 级随机路面输入下以10m/s 与20m/s 的速度行驶,得到被动控制模型、模糊控制模型和自适应模糊控制模型的车身加速度性能对比曲线,如图4 所示。不同速度下,采用自适应模糊控制和模糊控制的半主动悬架系统的车身加速度和悬架动行程相较于被动控制均有所降低,而自适应模糊控制性能更加优越。

图4 不同车速下车身加速度Fig.4 Body Acceleration at Different Speeds
为进一步说明自适应模糊控制的性能,以车身加速度均方根值作为性能评价指标,对比分析自适应模糊控制相较于模糊控制和被动控制的优越性。不同速度下采用自适应模糊控制和模糊控制的半主动悬架系统的车身加速度均方根值相较于采用被动控制均有所降低。当车速为10m/s 时,模糊控制相较于被动控制的车身加速度均方根值分别减少了49.89%。自适应模糊控制相较于被动控制的车身加速度均方根值分别减少了63.83%。当车速为20m/s 时,模糊控制相较于被动控制的车身加速度均方根值49.86%。自适应模糊控制相较于被动控制的车身加速度均方根值分别减少了63.88%。
5 结论
针对汽车半主动悬架系统在行驶过程中可能发生的阻尼器增益故障,建立了阻尼器发生增益故障时的故障悬架模型,设计了一个未知输入观测器对阻尼器增益故障进行故障诊断,在此基础上,基于自适应模糊控制对汽车半主动悬架系统阻尼器增益故障设计并进行了Simulink 仿真分析。
结果表明,采用自适应模糊控制和模糊控制的半主动悬架系统的性能均高于被动控制,而自适应模糊控制性能更加优越,说明所设计的自适应模糊控制器能较好的改善车辆的乘坐舒适性,提高车辆的行驶平顺性。
