纯电动汽车复合电源能量管理控制策略研究
2021-03-05张维刚
许 兵,张维刚
(湖南大学汽车车身先设计制造国家重点实验室,湖南 长沙 410082)
1 引言
日益严峻的能源短缺与环境污染问题使得电动汽车成为汽车领域的研发热点,其高效的能量利用率及零污染排放的环境友好性使其受到各国研究机构的青睐[1]。目前,电动汽车主要采用单一电池作为动力源,在汽车行驶过程中频繁变化的峰值功率会对电池造成较大的冲击从而降低电池的使用寿命,同时电池低比功率的特性往往无法应对汽车急加速、爬坡等峰值功率需求[2]。超级电容具有循环寿命长、高比功率等优点,将超级电容器与蓄电池组合成复合电源系统能够做到优势互补,既能改善电动汽车动力性能,又能提高制动能量回收效率,降低汽车能量消耗,并提高储能系统的使用寿命。
复合电源由于具备两种不同的能量源,其能量的合理分配成为当前的研究热点,复合电源系统能量管理控制策略的好坏对复合电源系统的工作性能具有重要的影响[3]。目前,滤波控制[4]、基于规则的控制[5]、模糊控制[6]、粒子群算法[7]、人工蜂群算法[8]、神经网络控制[9]等方法被广泛应用于复合电源系统。低通滤波的控制主要是分离各能量源的需求功率,使超级电容器得到充分的利用,但无法兼顾电池的工作效率。基于规则的控制思想主要是利用简单的阈值设计复合电源的工作模式,其控制策略简单,系统运行效果有待提高。模糊控制策略的控制器参数主要依靠专家经验,不能够根据工况的实时变化而调整。粒子群算法在优化过程中容易出现局部收敛的情况,难以找到全局最优解。人工蜂群算法领域搜索能力强,但其全局搜索能力较差。神经网络算法理论上具有较好的全局搜索与实时调整能力,但其运算对硬件要求较高。
遗传算法通过模拟人类遗传的特点,具有全局搜索能力强,可扩展性好,易于表达非精确的数学模型等一系列优点。基于遗传算法,对复合电源系统的双模糊控制策略的控制参数进行优化,结合MATLAB 与ADVISOR 联合仿真,以得到最优的能量管理控制效果,充分利用超级电容优势,提高制动能量回收效率,降低复合电源系统能耗,提高纯电动汽车的经济性能以及储能系统工作寿命。
2 复合电源系统结构
复合电源系统有三个主要的组成部分:蓄电池、超级电容器和双向DC/DC 转换器。选取主动控制式的拓扑结构,由超级电容器与双向DC/DC 转换器串联,再将其与蓄电池并联,利用控制策略模块对系统能量进行合理的分配,最后为电机负载提供能量。DC/DC 转换器可以协调蓄电池与超级电容器之间的电压,能够有效提高能量利用效率,保护蓄电池避免峰值电流的冲击,有利于电机稳定的工作,提高蓄电池的使用寿命。复合电源系统结构组成,如图1 所示。
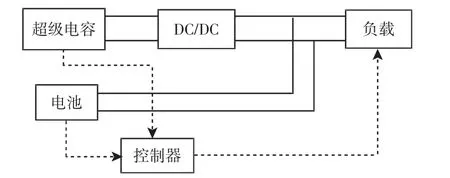
图1 复合电源系统结构Fig.1 The Structure of HESS
复合电源系统的结构决定了复合电源的功率流向,电动汽车对复合电源系统的需求功率和所能够提供的功率分别为Preq和Pess,蓄电池提供的功率为Pbat,超级电容器提供功率为Puc,在忽略系统功率损失的情况下,系统功率分配满足式(1):

为便于复合电源系统的数学描述,引入超级电容器、蓄电池的功率分配因子分别是Kuc和Kbat,则复合电源的功率分配可由式(2)表示:

3 复合电源系统参数匹配
为了更接近实际应用,根据所选的纯电动汽车基本参数,如表1 所示。参考《新建纯电动乘用车企业管理规定》,制定纯电动汽车性能指标,如表2 所示。根据所选车型基本参数,在NEDC(欧洲典型试验工况)循环工况下,以满足系统的能量、功率需求为前提,匹配驱动电机参数以及蓄电池、超级电容器的单体数目。
根据汽车理论中电机转速与固定速比、主减速比的关系式(3)和最高转速与基速关系式(4),设计驱动电机的基本参数,包括最高转速nmax与基速nb。

式中:nmax、nb、vmax、io、ig、r—驱动电机最高转速、驱动电机基速、汽车最高车速、主减速比、变速器固定速比及车轮滚动半径,β一般取(2~4)。
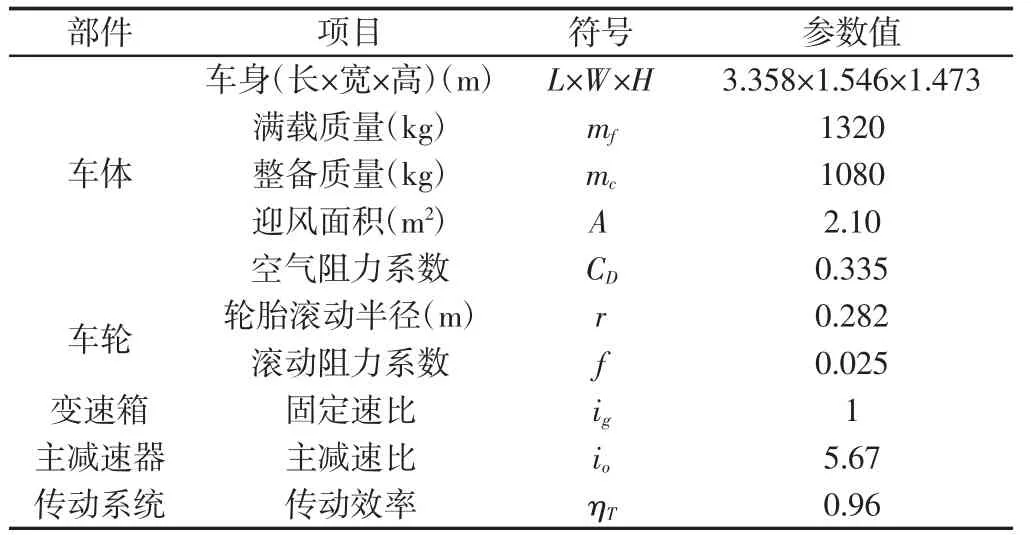
表1 复合电源纯电动汽车基本参数Tab.1 Basic Parameters of Pure Electric Vehicle with HESS
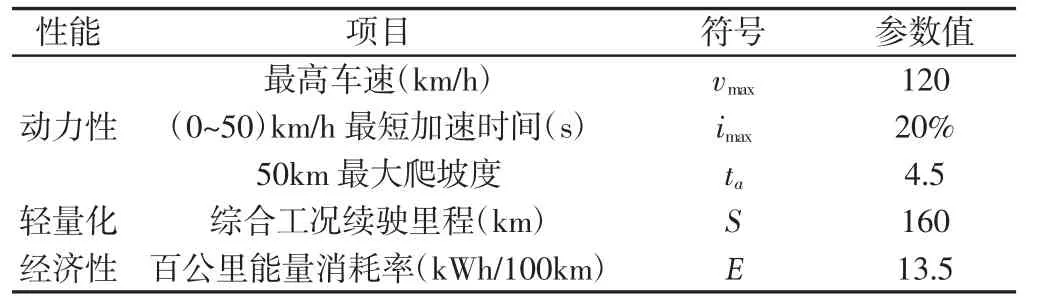
表2 复合电源纯电动汽车性能指标Tab.2 Performance Index of Pure Electric Vehicle with HESS
以满足纯电动汽车的动力性能指标为前提,匹配电机的功率、转矩等参数,动力性能指标包括最高车速、最大爬坡度以及最短加速时间三个要求。根据汽车动力性参数性质,电机的峰值功率必须能够同时满足上述三个动力性能指标,根据所选车型的基本参数,得到驱动电机的参数,如表3 所示。
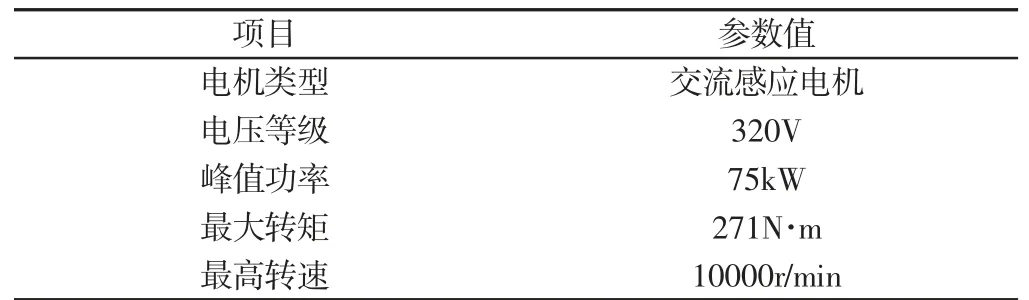
表3 驱动电机基本参数Tab.3 Basic Parameters of Motor
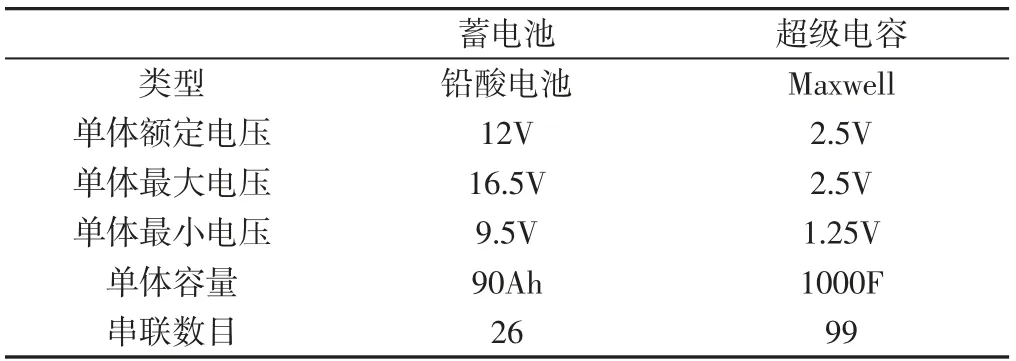
表4 复合电源各动力源参数Tab.4 Parameters of Each Power Source of HESS
复合电源纯电动汽车中,主要由能量密度较高的蓄电池来提供汽车行驶的大部分能量,超级电容器主要提供所需峰值功率。在NEDC 工况下,根据能量、功率两个方面的需求来设计蓄电池、超级电容器所需要提供的能量和功率,从而合理地选取蓄电池组与超级电容组的单体数目。分别以纯电动汽车的续驶里程、行驶工况下的平均需求功率、需求能量来匹配蓄电池的参数,以加速时的峰值功率需求来匹配超级电容器参数。根据蓄电池、超级电容的参数特性,所设计复合电源系统中蓄电池与超级电容器的参数,如表4 所示。
4 复合电源系统模糊控制策略
能量管理控制策略的作用是将汽车运行时的能量需求合理地分配给复合电源系统中的能量源,使系统能够高效的工作,其控制思想是蓄电池提供汽车行驶过程中的平均需求功率,超级电容器提供高于平均功率的部分,对蓄电池的功率、电流等方面起到“削峰填谷”的作用[10-11]。
复合电源系统具有放电提供能量和充电回收制动能量两种主要的工作模式,为提高能量控制的效果,针对不同的工作模式设计不同的模糊逻辑控制策略,即采用双模糊控制器作为能量管理控制单元。两种工作模式下均采用以汽车需求功率Preq、蓄电池核电状态SOCbat及超级电容核电状态SOCuc为输入,超级电容功率分配因子Kuc为输出的Mamdani 型模糊控制器,模糊推理规则采用IF-THEN 语句形式来制定。
根据复合电源系统的工作特性,所设计的复合电源系统模糊逻辑能量管理控制策略遵循以下规律:
(1)当需求功率Preq>0:超级电容器SOC 较高时,优先使用超级电容器提供能量,蓄电池只提供较小的平均功率,峰值功率较大时由蓄电池与超级电容共同提供能量;
(2)当需求功率Preq<0:超级电容优先回收制动能量,当超级电容SOC 处于较高状态时,则改由蓄电池回收制动能量。
复合电源的控制策略核心思想旨在充分利用超级电容器快速充放电、循环寿命长及峰值功率高的优势,通过分担蓄电池的峰值功率、峰值电流,从而使蓄电池工作在稳定的电流范围内,起到保护蓄电池的作用,延长蓄电池的使用寿命。当汽车制动时,利用超级电容器充放电效率高的优势来回收制动能量,提高能量的利用率,从而提高汽车的经济性能。
模糊子集的数量直接影响到模糊控制器的运算效率,通过对系统工作状态的分析,将驱动工况(放电状态)和制动工况(充电状态)下的模糊控制器的输入、输出变量的模糊子集设置,如表5 所示。各模糊子集的论域、隶属度函数分别设置,如图2、图3 所示。依据复合电源模糊控制器的控制规律,在MATLAB/SIMULINK 仿真软件中建立模糊逻辑能量管理控制策略仿真模型,如图4 所示。
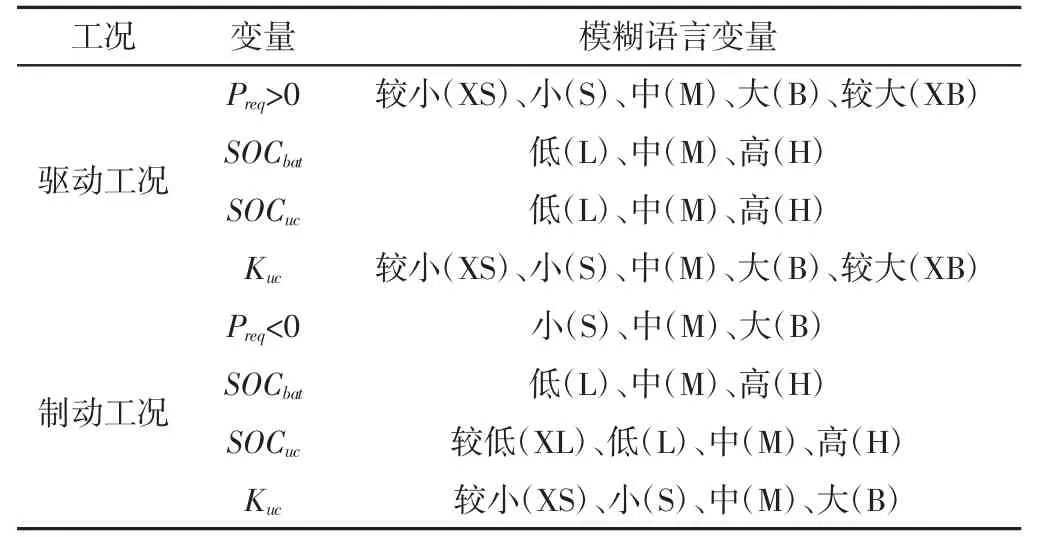
表5 输入、输出变量的模糊子集Tab.5 Fuzzy Subsets of Input and Output Variables
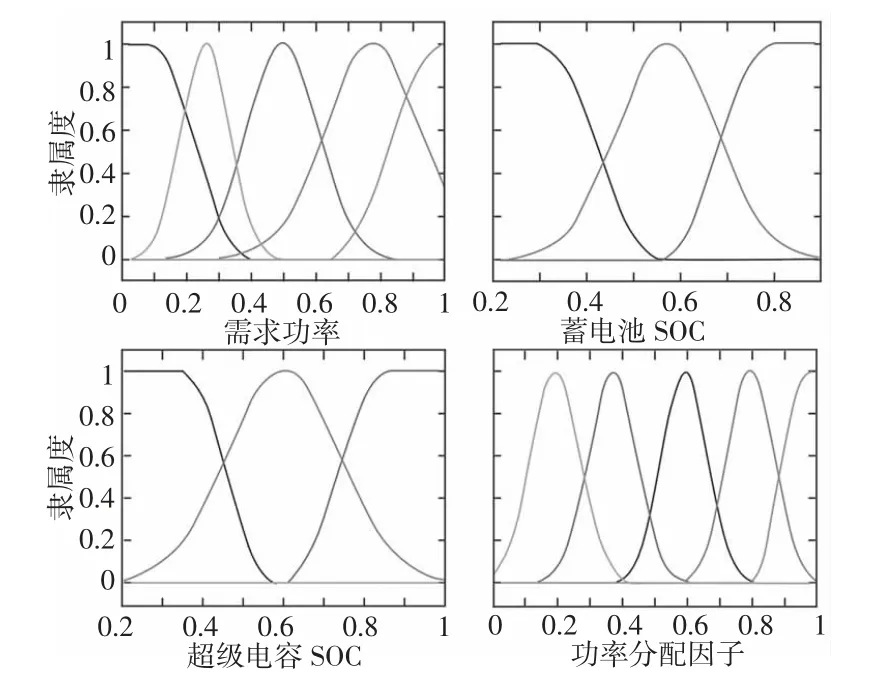
图2 放电模式下输入、输出变量模糊子集的隶属度函数Fig.2 Membership Functions of the Fuzzy Subset of Input and Output Variables in Discharge Mode
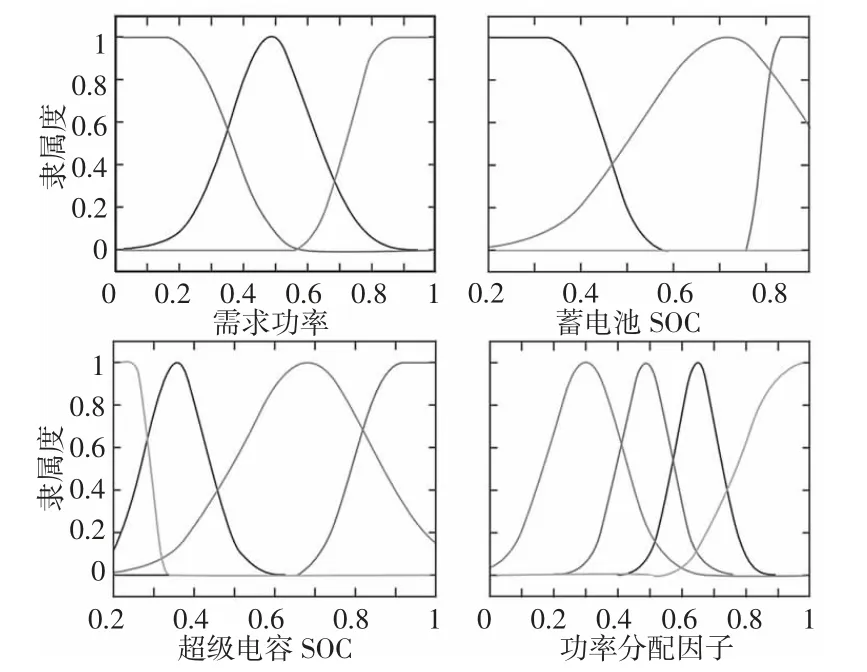
图3 充电模式下输入、输出变量模糊子集的隶属度函数Fig.3 Membership Functions of the Fuzzy Subset of Input and Output Variables in Charge Mode
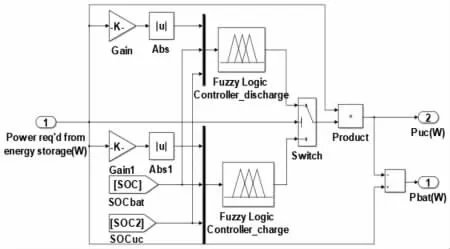
图4 复合电源系统模糊逻辑能量管理控制策略Fig.4 Fuzzy Logic Energy Management Control Strategy of HESS
5 基于遗传算法的模糊控制参数优化
由于模糊控制器的控制参数与模糊推理规则主要依赖专家经验,系统运行工况的复杂多变需要更加灵活地调整控制器的参数使控制策略达到更好的效果。基于遗传算法对模糊控制器的隶属度函数参数进行优化,以提升能量管理控制策略的性能。
复合电源系统的模糊控制器参数优化是一个典型的非线性约束优化问题,其数学描述,如式(5)所示:
设计的模糊控制器隶属度函数类型有三种:高斯型、Sigmoid型和Z 型,三种隶属度函数表达式均由两个特征参数a、b 确定,因此,待优化参数可表示为如式(6)所示:
式中:X、Y、Z、M—输入变量Preq、SOCbat、SOCuc 及输出变量Kuc所对应的待优化参数,xi与xi+1是第i 个隶属度函数的两个特征参数,Y、Z、M 中的参数与X 中关系同理。
根据各模糊子集之间的关系,同时为减少运算时间,设置优化参数的基本约束,如式(7)所示:
能量管理控制目标旨在合理分配需求功率,充分发挥各能量源优势,避免电池遭受大电流冲击,延长其使用寿命,提高系统能量回收效率,降低整车能耗。因此,设计的优化算法目标函数,如式(8)所示:

式中:Eall—系统总能耗;D—汽车行驶距离;SOCbatr—仿真结束后蓄电池剩余电量;w1和w2—两部分对应的权重,w1+w2=1。
为了使复合电源系统各部件的安全、健康以及高效地工作,需要对各能量源的SOC、功率及能量进行相应的边界约束,如式(9)所示:
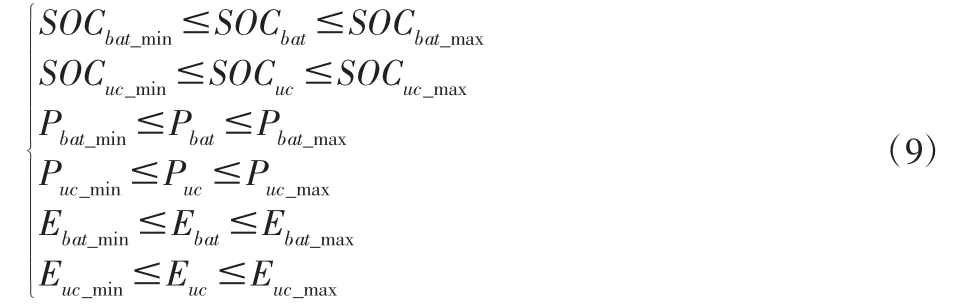
式中:SOCbat、Pbat、Ebat、SOCuc、Puc、Euc—蓄电池的SOC、功率及能量和超级电容器的SOC、功率及能量。
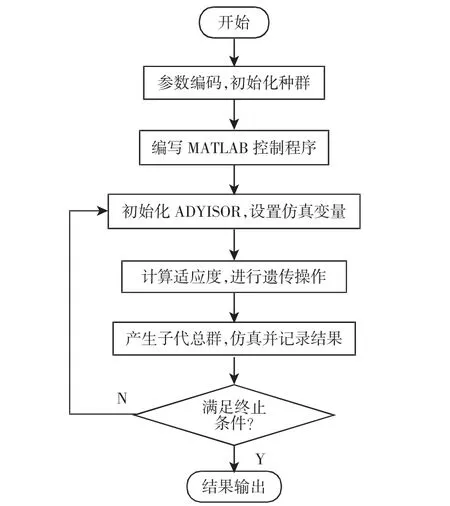
图5 遗传算法优化模糊控制流程Fig.5 Optimization Procedure of Genetic Algorithm of Fuzzy Logic Controller
基于遗传算法的模糊控制优化过程需要结合MATLAB 程序与ADVISOR 软件进行联合仿真,通过在MATLAB 中编写控制算法及优化算法程序,并与ADVISOR 程序之间进行相互调用,实现参数的最优化,具体优化流程,如图6 所示。
6 仿真及结果分析
通过对ADVISOR 仿真软件中的纯电动车型进行二次开发,主要包括修改整车顶层仿真模型文件、编辑底层M 文件,基于所选车型基本参数完成仿真参数的设置与修改,在MATLAB 中编写遗传算法优化模糊控制器的程序,在NEDC、UDDS 循环工况下进行离线优化仿真来得到模糊控制器隶属度函数的最优参数。将最优解导入复合电源模糊逻辑能量管理控制策略,进行不同行驶工况下的性能仿真实验,对比分析优化前后结果以验证遗传算法优化模糊控制器参数的有效性。
优化前后复合电源系统在完成单个NEDC 循环工况下的蓄电池SOC 变化曲线对比,优化后的蓄电池SOC 曲线下降速率明显降低,完成单个循环工况后,蓄电池的SOC 剩余量提高4.55%,说明超级电容的利用效率提高,蓄电池能量消耗降低,蓄电池的放电状态得到改善,能够有效提高纯电动汽车的续驶里程,延长储能系统的使用寿命,如图6 所示。
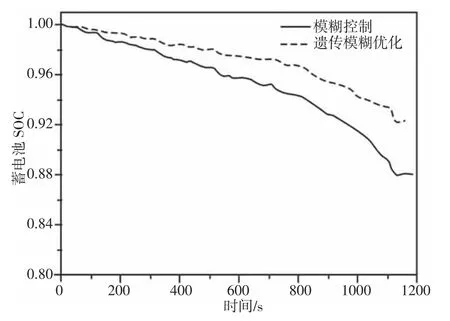
图6 优化前后的NEDC 工况下蓄电池SOC 变化对比Fig.6 Comparison of Battery SOC Changes in NEDC Condition Before and After Optimization
NEDC 工况下优化前后的系统总能耗仿真结果对比,利用遗传算法对模糊控制器进行优化后,复合电源系统的总能耗降低4.88%,纯电动汽车的经济性能明显提高,如图7 所示。
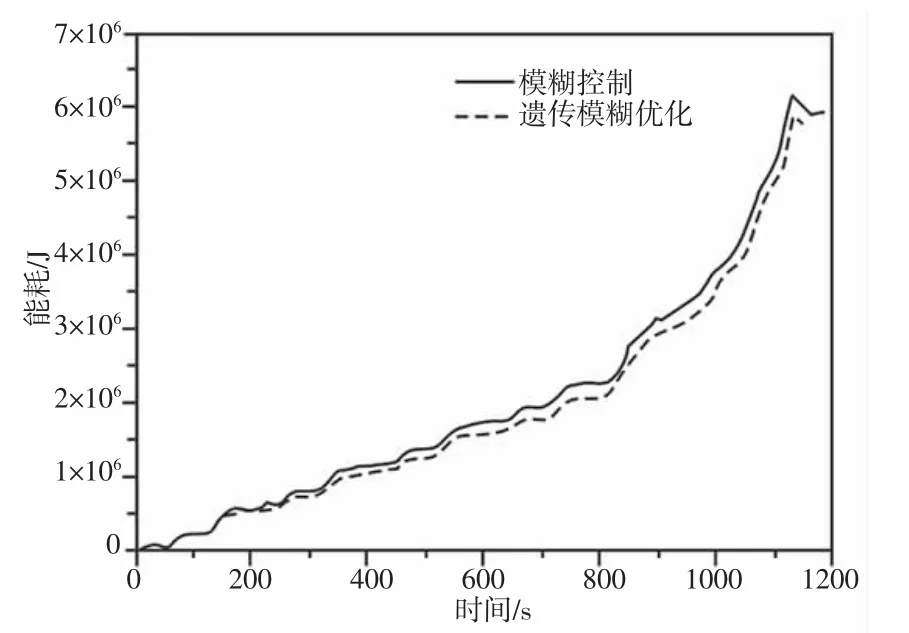
图7 优化前后的NEDC 工况下系统总能耗对比Fig.7 Comparison of Total Energy Consumption of the System under NEDC Condition Before and After Optimization
在同样的单个NEDC 循环工况下,优化后复合电源系统总能量消耗的变化速率下降,说明复合电源系统的能量利用效率提高;同时,由于超级电容器的高效充放电效率使得制动能量回收效率提高14.95%,储能系统能量分配变得更加合理,不仅能延长储能系统的工作时间,也使得储能系统的节能性能大大提高。
优化前后蓄电池电流变化曲线对比,经遗传算法优化后的模糊控制策略下蓄电池的电流大小明显降低,峰值电流降低效果显著,说明超级电容承担了主要的峰值功率,蓄电池遭受大电流冲击情况明显改善,电池能够工作在稳定的电流范围,蓄电池的使用寿命将大大提高,也使得储能系统的工作寿命得以提高,如图8 所示。NEDC、UDDS 循环工况下的优化前后结果对比,如表6 所示。
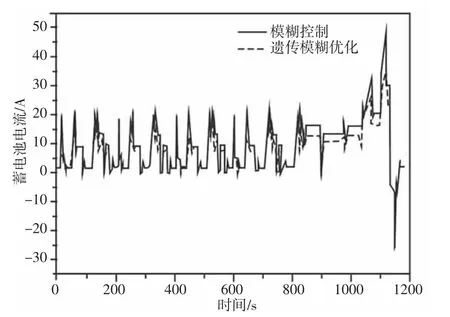
图8 优化前后的NEDC 工况下蓄电池电流变化对比Fig.8 Comparison of Battery Current in NEDC Condition Before and After Optimization
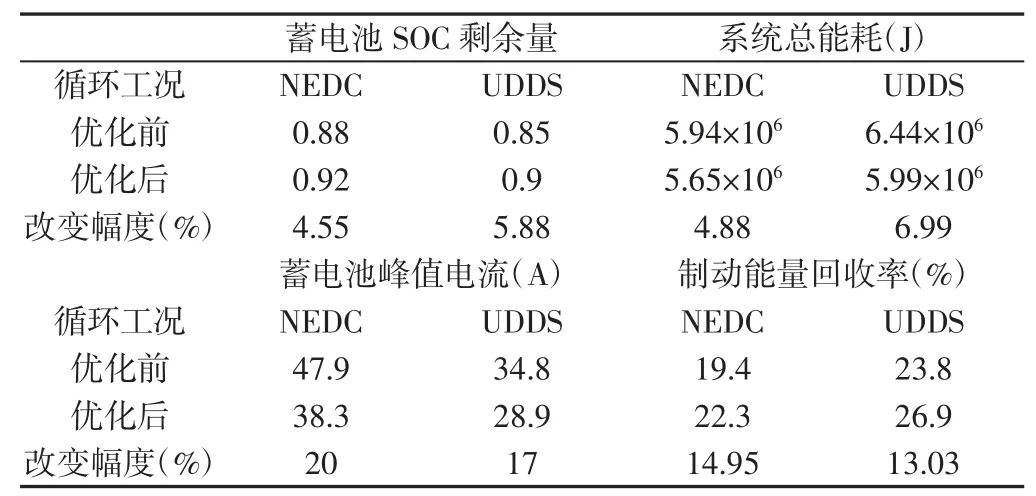
表6 优化前后结果对比Tab.6 The Comparison of Results Before and After Optimization
7 结论
针对蓄电池循环寿命短、充放电效率低等缺点,将蓄电池和超级电容器组成复合电源系统作为纯电动汽车的储能系统,采用合理的能量管理控制策略来降低电动汽车能量消耗、提高储能系统使用寿命。基于选定车型,参照电动汽车性能指标对复合电源系统、驱动电机进行参数匹配,制定模糊逻辑能量管理控制策略,利用遗传算法对模糊控制器隶属度函数参数进行优化,结合MATLAB 与ADVISOR 仿真软件进行整车性能仿真分析。结果表明:基于遗传算法优化后的模糊控制能量管理策略能够充分发挥超级电容器的特点,有效改善蓄电池的放电状态,降低复合电源系统总能耗,稳定蓄电池充放电电流从而保护蓄电池,延长储能系统的工作寿命,提高系统能量利用效率。
