基于ADAMS的三十字轴万向节转向系统力矩波动优化
2021-03-05杜满胜郑勇
杜满胜,郑勇
基于ADAMS的三十字轴万向节转向系统力矩波动优化
杜满胜,郑勇
(江铃汽车股份有限公司,江西 南昌 330052)
汽车转向系统的力矩波动是影响整车操纵性的重要因素之一。由于受到人机、布置、碰撞安全、装配等限制,转向系统的力矩波动率难于保证。文章基于MATLAB和ADAMS软件对某车型的三十字轴万向节转向系统进行了力矩波动分析,通过对相位角的优化,降低该车型转向系统的力矩波动率,提高整车操作性能。
转向系统;三十字轴万向节;力矩波动;ADAMS
前言
汽车行业伴随着人们对高品质的驾驶追求而发展迅速,汽车的操纵性能是最能被用户感知的一环,是用户评价整车品质的关键指标。汽车转向系统的力矩波动即是影响整车操纵性的因素之一[1]。因人机、布置、碰撞安全、装配等限制,转向管柱通常分为三段或四段式,本文的研究对象为四段式转向管柱,其段与段之间用十字轴万向节联接,共三个十字轴万向节。而十字轴万向节要实现完全等速传动对布置要求极为严格,更何况三个十字轴万向节。因此,有必要分析影响十字轴万向节力矩波动的参数并提出分析方法以优化转向系统的力矩波动率改善整车操纵性能。
1 十字轴万向节传动理论
1.1 单十字轴万向节
由单十字轴万向节连接的主、从动轴的角速度1、2有如下关系:[2]

式中:1为AO与BO的夹角,1为主动轴AO转角
由式(1)可知,只有当为0时,主、从动轴的转速才相等,只要不为0,输出轴一定会产生角速度波动。
图1 单十字轴万向节连接
1.2 双十字轴万向节
为了避免输出轴转速波动,工程中常采用双十字轴万向节转向管柱,这种转向管柱分三段:即输出轴、中间轴、输入轴;由于受空间限制,三轴布置无法共面。欲实现等速传动,须同时符合两个条件[3,4]:1、输入轴与中间轴的夹角1同输出轴与中间轴的夹角2相等;2、中间轴两端十字轴万向节存在一相位角,其大小等于输入轴和中间轴形成的平面与输出轴和中间轴形成的平面的夹角。由十字轴传动关系[5]可知:输出轴与中间轴的转速存在如下关系:

图2 双十字轴万向节转向管柱

式中,2为中间轴与输出轴夹角,2为中间轴转角,1为十字轴万向节1与2的相位角。
1.3 三十字轴万向节

图3 三十字轴万向节转向管柱
根据式(1)(2),同理得:

根据式(1)(2)(3)得:


2 三十字轴万向节转向管柱力矩波动优化
2.1 在不考虑十字轴万向节的传动损失时[2],输入轴与输出轴力矩满足以下关系式:

由式(6)可知转向系统的力矩波动可以用转速波动来表示。
2.2 某车型参数
某车型三十字轴万向节转向管柱硬点数据如表1:
表1 转向管柱硬点坐标及参数
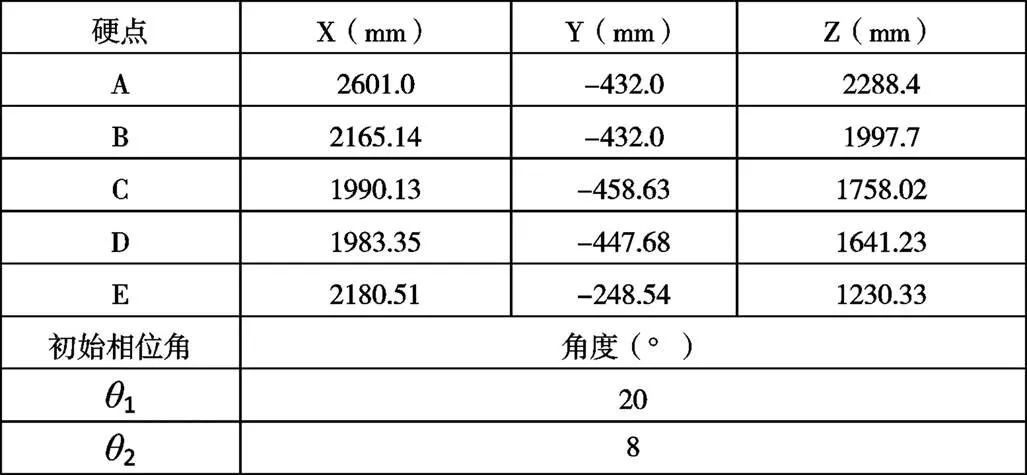
表1中A、B、C、D、E分别表示方向盘中心点、十字轴万向节1中心点、十字轴万向节2中心点、十字轴万向节3中心点、输出轴轴线上一点。
2.3 数学模型分析
进行Adams运动学仿真除各硬点参数外,还必须建立十字轴模型,确定各轴与十字轴的运动副所在位置。分析十字轴与硬点和相位角的关系式,模型简图4:
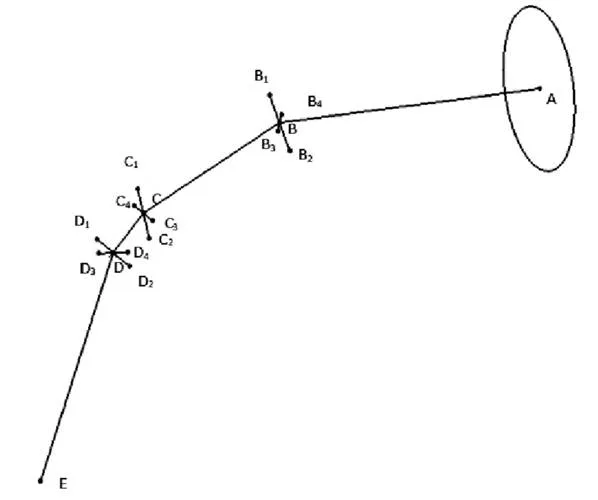
图4 三十字轴万向节管柱简图
十字轴万向节的结构特点:十字轴的两轴互相垂直,各传动轴与其相连的节叉垂直。根据该特点及硬点和相位角参数,利用MATLAB编程[6]计算得到十字轴各点坐标,因十字轴的对称性,只取一半建模即可,计算结过如表2:
表2 十字轴坐标

2.4 ADAMS模型建立及仿真
根据表1和表2的参数在Adams car中以table形式建立所有的Hardpoints,连接相关Hardpoints建立各Parts,设置运动副、驱动、输入轴转速及仿真时间[7]。如图5所示:

图5 ADAMS模型

图6 θ1=20°时的转速波动
2.5 转速波动优化
将初始相位角1作为设计变量,其值由20°改为25°,硬点和2保持不变,利用MATLAB得到十字轴各点坐标如下表3。
表3 相位角优化后的十字轴坐标

图7:θ1=20°时的转速波动
结果表明,相位角1优化后,转速波动明显减小,即力矩波动减小,转向操作性能提升。
3 结论
①三十字轴万向节连接的转向系统的力矩波动与各轴夹角及节叉相位角有关;
②力矩波动可以等价为转速波动;
③通过MATLAB参数化计算十字轴坐标,建立Adams模型,验证了通过相位角可以优化力矩波动,提升车辆操作性。
[1] 裴锦华,李明.汽车转向系统力矩波动的匹配研究[J].汽车科技2010(3).
[2] 王望予.汽车设计.北京:机械工业出版社,2004:122-123.
[3] 朱理.机械原理[M].2版.北京:高等教育出版社,2010:261-263.
[4] 倪长明,许南绍,朱文.汽车转向系统十字轴万向节传动优化设计及运动仿真分析[J].重庆工学院学报,2009(9):20-24.
[5] 郑文伟,吴克坚.机械原理[M].7版.北京高等教育出版社1997.7.
[6] 张磊.MATLAB实用教程[M].人民邮电出版社2008.
[7] 陈峰华.ADAMS虚拟样机技术从入门到精通[M].清华大学出版社2017.
Torque Ripple Optimization of Steering System with Three-Cross Universal Joint Based on ADAMS
Du Mansheng, Zheng Yong
( Jiang Ling Motors Co., Ltd. Jiangxi Nanchang 330052 )
Torque ripple of automobile steering system is one of the important factors affecting vehicle maneuverability. Due to the limitations of man-machine, layout, collision safety and assembly, it is difficult to guarantee the torque ripple rate of steering system. In this paper, based on MATLAB and Adams software, the torque ripple of the steering system with three-Cross Universal Joint of a vehicle is analyzed. By optimizing the phase angle, the torque ripple rate of the steering system of the vehicle is reduced and the operation performance of the vehicle is improved.
Steering system; Three-Cross Universal Joint; Torque ripple; ADAMS
10.16638/j.cnki.1671-7988.2021.04.006
U462.1
B
1671-7988(2021)04-18-03
U462.1
B
1671-7988(2021)04-18-03
杜满胜,就职于江铃汽车股份有限公司。
