基于Roadbox设备泊车VIL性能开发
2021-03-05姜家如刘君程宋绍文罗传东李石王涛
姜家如,刘君程,宋绍文,罗传东,李石,王涛
基于Roadbox设备泊车VIL性能开发
姜家如1,刘君程2,宋绍文1,罗传东1,李石1,王涛1
(1.安徽江淮汽车集团股份有限公司 技术中心,安徽 合肥 230601; 2.安徽江淮汽车集团股份有限公司 国际公司,安徽 合肥 230601)
文章主要描述一种基于Roadbox设备搭建的自动泊车VIL测试平台;采用虚拟车辆上配置的虚拟探头探测场景中障碍物距离信息,通过Roadbox机箱中的超声波仿真板卡将距离信息转换成电平信号,再由超声波换能器产生超声波,进而被真实传感器探头接收到,传给实车上APA控制器,控制车辆运动。真实车辆运动情况由IMU通过CAN线传给虚拟车辆,进而驱动虚拟车辆随着真实车辆的运动,完成泊车过程。
VIL;Roadbox机柜;超声波换能器;IMU;超声波仿真板卡
引言
为了解决新手停车难的问题,开发出一款能够代替真实驾驶员完成整个泊车过程的系统迫在眉睫[1-2]。为了确保APA控制器能否满足项目要求,一般在项目开发前期需要对泊车控制器功能进行测试验证,由于受到天气、路面类型、停车位类型以及交通环境的限制[3],泊车VIL测试将完美地解决上述限制因素的影响。
1 VIL系统简介
本系统提供一种基于Roadbox设备搭建的自动泊车VIL测试平台;采用虚拟场景中虚拟车辆上配置的虚拟探头探测虚拟场景中障碍物距离信息,通过Roadbox机箱中的超声波仿真板卡将距离信息转换成电平信号,再由超声波换能器产生超声波,进而被真实传感器探头接收到,传给实车上APA控制器,控制车辆运动。真实车辆运动情况由IMU通过CAN线传给虚拟车辆,进而驱动虚拟车辆随着真实车辆的运动在虚拟场景中完成泊车过程。

图1 VIL测试方案
2 硬件介绍
VIL测试系统牵涉到的硬件主要由以下几部分组成:
1)APA控制器;
2)超声波换能器;
3)Roadbox机箱;
4)实车;
5)电源;
6)IMU。
3 虚拟模型搭建
3.1 超声波模型搭建
由于整车VIL测试环节,停车位是由虚拟探头探测虚拟车位通过模拟传递给控制器,一般为了使虚拟探头探测的距离更接近于真实探头探测距离,需要通过优化虚拟探头探测角度来满足设备要求[4-6]。
3.2 虚拟场景搭建
在此VIL测试过程,主要针对水平泊车功能进行测试验证,我们采用最简单的两平行车位后面的停车位进行,绘制泊车虚拟场景如下图所示:
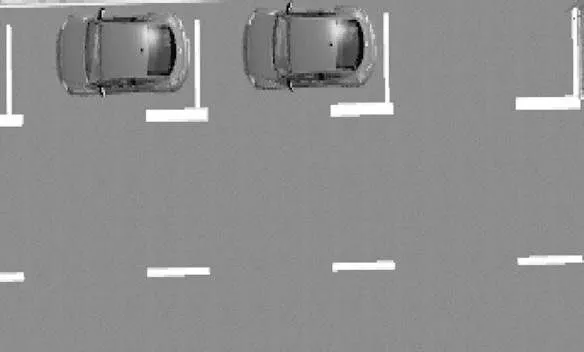
图2 虚拟场景搭建
3.3 虚拟车辆搭建
VIL测试过程中所配置的车辆动力学模型为VIL模型,需要配置整车质心坐标、整车转动惯量、轮胎参数以及后期测试动画中整车外观模型等。
4 IMU配置
IMU设备在VIL测试系统中的功能主要通过与固定基站通讯,实时采集真实车辆运动轨迹的X、Y坐标以及航向角,通过CAN线将此三个参数传递给上位机中虚拟车辆,进而驱动虚拟车辆随着真实车辆运动。
5 水平泊车
实车挂D挡位,保持7km/h左右的速度直线前进,此时虚拟场景中的本车也开始按照实车轨迹前进。然后打开APA开关激活半自动泊车功能,开始搜索车位。
虚拟场景中,虚拟车辆上配置的虚拟探头在不断搜索车位信息,当经过合适的车位时,虚拟探头将探测到的距离信息传给Roadbox机箱里面的超声波仿真板卡,将距离信号转换成电平信号,进而由超声波换能器产生回波,传给超声波换能器中真实超声波探头,真实探头即将此模拟电平信号传给控制器,进而由控制器发出指令,在仪表盘上显示提示找到车位并缓慢行驶,当行驶到足够的安全距离后,仪表会文字提示驾驶员“请停车”。驾驶员按照指示停车后,APA便接管方向盘泊车,泊车期间驾驶员需配合仪表盘提示完成换挡和踩踏板等操作。
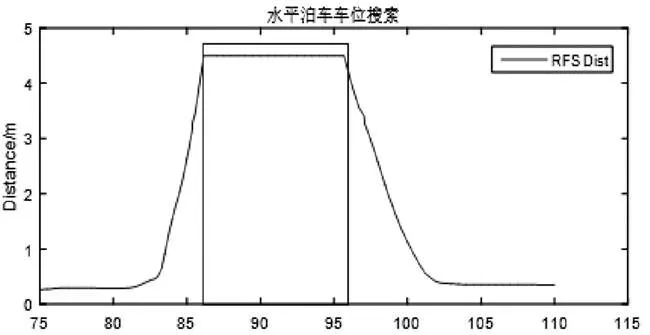
图3 寻找车位时间

图4 寻找车位速度
车位长度=寻找车位时间*寻找车位速度= 6.66米

图5 真实与虚拟对比图
而实际场景中设置的泊车车位宽度为6.4米,通过对比发现,水平泊车时,ECU识别到的车位宽度与场景中设置的车位宽度基本一致。具体对比结果如图5所示。
6 结论
本论文采用虚拟仿真技术,让实车测试过程不会因为测试场地的限制无法完成测试任务;现在采用虚拟测试场景取代真实测试场景,能够在一定程度上摆脱天气、场地等因素的干扰。
[1] 周洪宇,王九灵,冯震,等.基于模拟技术的雷达测试环境构建研究 [J].现代雷达, 2014:36(9):79-82.
[2] 梁铎耀,梁雅淇,武斌,等.汽车超声波雷达辅助泊车系统开发[J].中国新技术新产品,2018(19):16-18.
[3] 冯广增.基于激光雷达的智能汽车近程环境感知应用研究[D].吉林大学,2020.
[4] 贾程栋.面向城市智能汽车的场景多模真实感重建技术研究[D].电子科技大学,2020.
[5] 曹爱君.汽车自动驾驶原理及关键技术分析[J].时代汽车,2020(03): 10-11.
[6] 朱冰,张培兴,赵健,等.基于场景的自动驾驶汽车虚拟测试研究进展[J].中国公路学报,2019,32(06):1-19.
VIL Performance Development Based on Roadbox Equipment Parking
Jiang Jiaru1, Liu Juncheng2, Song Shaowen1, Luo Chuandong1, Li Shi1, Wang Tao1
(1.Technology Center of Anhui Jianghuai Automobile Group Corp., Ltd, Anhui Hefei 230601;2.Anhui Jianghuai Automobile Group Corp., Ltd. International Company, Anhui Hefei 230601 )
This article mainly describes an automatic parking VIL test platform based on Roadbox equipment. Detect obstacle distance information in virtual scene by virtual probe of virtual vehicle in the virtual scene, and then convert the distance information to level signal by ultrasonic simulation board card in Roadbox, and then converted to the ultrasonic wave,which is generated by the ultrasonic transducer to be received by the real sensor probe, finally pass to the real car APA controller to control the vehicle movement. The real vehicle movement is transmitted by IMU to the virtual vehicle through CAN line, and then drives the virtual vehicle to complete the parking process in the virtual scene along with the movement of the real vehicle.
VIL; Roadbox equipment; Ultrasonic transducer; IMU; Ultrasonic simulation board card
10.16638/j.cnki.1671-7988.2021.04.004
TU 411.01
A
1671-7988(2021)04-11-03
TU 411.01
A
1671-7988(2021)04-11-03
姜家如(1988-),女,安徽省六安市人,哈尔滨工业大学学士学位,中级工程师,就职于安徽江淮汽车集团股份有限公司技术中心。
