纯电动汽车加速过程的转矩优化控制策略
2021-03-05马晓楠吉春宇韦尚军覃记荣郑伟光
马晓楠,吉春宇,韦尚军,覃记荣,郑伟光,
纯电动汽车加速过程的转矩优化控制策略
马晓楠1,吉春宇2,韦尚军2,覃记荣2,郑伟光1,2
(1.桂林电子科技大学 机电工程学院,广西 桂林 541004;2.东风柳州汽车有限公司,广西 柳州 545005)
针对纯电动汽车在加速过程中电机输出转矩不能准确表达驾驶员驾驶意图的问题,提出了基于模糊控制的转矩优化控制策略。为了准确识别驾驶员在加速过程中的驾驶意图,建立了以车速偏差和加速踏板开度变化率为输入变量,驾驶意图系数为输出变量的模糊控制器,对驾驶员的加速意图进行识别,并将汽车的加速模式设计为动力模式、一般模式和经济模式3种模式。动力模式采用硬踏板曲线控制,同时为提高车辆在低速和急加速时的加速性能,增加了基于模糊控制的补偿转矩;一般模式采用线性踏板曲线控制,作为动力模式与经济模式切换的过渡;经济模式采用软踏板曲线控制,提高车辆加速时的经济性。仿真结果表明:与传统的线性控制策略相比,所研究的转矩优化控制策略能够准确识别驾驶员的驾驶意图,汽车的动力性和经济性都得到了改善。
纯电动汽车;驾驶意图;模糊控制;转矩优化;补偿转矩
1 前言
纯电动汽车相对于传统汽车有噪声低、结构简单、无污染等优点,可以有效改善环境污染和资源短缺的问题,是未来汽车发展的趋势[1]。纯电动汽车所需要的电能全部来源于电池,但是电池技术的发展一直受到材料等原因限制,造成纯电动汽车的制造成本一直高居不下,对纯电动汽车的推广产生了一定阻碍[2]。传统的纯电动汽车的驱动控制策略基本都是采用线性踏板控制策略或单一控制策略,导致驾驶员的驾驶体验较差,整车的动力性和经济性都不突出。文献[3]中汽车的驱动转矩控制策略采用的线性踏板控制策略,策略较简单,整车的动力性和经济性都不突出。文献[4]通过改变加速踏板行程所对应的转矩负荷系数来确定电机的输出转矩,汽车的动力性得到改善。文献[5]提出了三种驱动模式供驾驶员手动选择,驾驶员的驾驶意图必须依靠正确的模式选择才能够体现出来,具有一定的局限性。文献[6]提出了基于模糊控制的转矩控制优化策略,但是仅考虑了一般加速和急加速的工况,未考虑缓慢加速的工况,整车的经济性较差。
针对上述问题,本文提出了基于模糊控制的转矩优化控制策略,设计了以加速踏板开度变化率和车速偏差为输入变量,以驾驶意图系数为输出变量的模糊控制器。根据汽车不同的加速工况,将汽车的加速模式设计为动力模式、一般模式和经济模式。然后根据模糊控制器的输出结果完成对加速模式的选择。仿真结果表明,基于模糊控制的转矩优化控制策略能够有效地对驾驶意图进行识别,汽车的动力性和经济性得到体现。
2 转矩控制策略
转矩控制策略的目的是对电机输出转矩进行合理的优化,使得电机输出转矩符合驾驶员的驾驶意图。根据模糊控制器输出的驾驶意图系数来确定加速模式,进而计算出电机输出转矩值,并将输出转矩指令传送给电机,控制策略流程如图1所示。
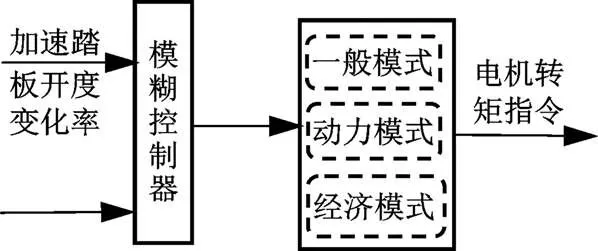
图1 控制策略流程图
2.1 加速模式识别
2.1.1驾驶员的期望车速
定义驾驶员的期望车速为某一加速踏板开度下,在良好无风平坦路面上,汽车所能够到达稳定工况时的车速。此时汽车的运动方程式为:

式中:v为驾驶员的期望车速。
由文献[7]可以得到某一加速踏板开度()下驾驶员的期望车速模型为:

由式(2)可以得出,驾驶员的期望车速v仅与加速踏板开度()有关,并且是一一对应的关系。
定义车速偏差为驾驶员期望车速与实际车速的差值:

式中:v为实际车速。
2.1.2加速模式模糊识别
在驾驶员的加速过程中,驾驶员的一系列操作会因环境变化而改变,整个过程也会变得复杂,模糊控制理论是一种不依赖数学模型且具有很强鲁棒性的控制方法[8],能够有效解决车辆在复杂工况下的控制方法。
在驾驶意图模糊控制器设计中,加速踏板开度变化率的论域为[0,100],车速偏差的论域为[0,90],两者语言变量模糊子集均分为5级:极小(VS)、小(S)、中(M)、大(B)、极大(VB);驾驶意图系数的论域为[1,4],语言变量模糊子集分为4级:极小(Z)、小(S)、中(M)、大(B)。输入输出变量的隶属度函数均采用三角形和梯形混合的隶属度函数,如图2所示。

图2 驾驶意图模糊控制器的隶属度函数
模糊控制规则采用()()()的形式,综合考虑驾驶员驾驶经验和车辆行驶状态,制定如表1所示25条模糊规则。模糊输出量通过去模糊化处理得到精确的输出量。
表1 模糊规则

2.1.3加速模式的确定
驾驶意图系数的大小代表着驾驶员的加速需求,故作以下划分将驾驶意图系数转换为确定的加速模式:当驾驶意图系数在[1,2]内斯,加速模式为经济模式;当驾驶意图系数在[1,3]内时,加速模式为一般模式;当驾驶意图系数在[3,4]内时,加速模式为动力模式。
2.2 动力模式转矩控制
动力模式可以让汽车有更好的动力输出,保证车辆能够快速地达到目标转速。为使汽车在动力模式下有更大的转矩输出,一方面电机采用硬踏板控制曲线,另一方面引入转矩补偿。动力模式下的电机输出转矩为:

式中,ld为某加速踏板开度下的电机转矩负荷系数;Tmax为电机某转速下的最大输出转矩;△T为补偿转矩。
动力模式下,加速踏板开度与转矩负荷系数的对应关系采用硬踏板曲线。对应关系如图3所示。
纯电动汽车在动力模式下的基础转矩是由加速踏板开度对应的转矩负荷系数和电机转速共同确定的。为提高动力模式下车辆的起步加速和急加速性能,在基础转矩上添加补偿转矩,来提高输出转矩。动力模式的转矩控制流程图4如下。

图4 转矩控制流程图
补偿转矩△主要由汽车实际车速和车速偏差来决定,车速偏差越大,补偿转矩也应越大;反之补偿转矩越小。汽车在低速时,对电机的输出转矩需求较大,应设置较大的补偿转矩;在高速时,电机的输出转矩主要维持车速,对电机输出转矩的需求不大,应设置较小的补偿转矩。
补偿转矩的设计应使车辆的平顺性不会受到很大的影响,因此在确定补偿转矩最大值时应充分考虑冲击度的限制,冲击度为:

将式(9)变化可得:

德国的冲击度限制标准为≤10/3,以电机的理论响应时间为20ms计算,电机在响应时间内转矩的最大变化值为80N·m,所以电机的补偿转矩最大值为80N·m。
基于上述分析设计以车速和车速偏差为输入变量、以补偿转矩为输出变量的模糊控制器,其中车速的论域为[0,90],车速偏差的论域为[0,90],补偿转矩的论域为[0,80],语言变量模糊子集均分为5级:极小(VS)、小(S)、中(M)、大(B)、极大(VB)。输入输出变量的隶属度函数均采用三角形和梯形混合的隶属度函数,如图5所示,模糊规则如表2所示。

图5 补偿转矩模糊控制器的隶属度函数
表2 模糊规则

2.3 一般模式转矩控制
纯电动汽车在一般模式下加速踏板开度与转矩负荷系数的对应关系采用线性曲线,兼顾汽车的动力性和经济性。并且一般模式还是动力模式与经济模式之间的过渡模式,提高了车辆行驶时的平顺性。一般模式下的电机输出转矩为:

式中,为某加速踏板开度下的电机转矩负荷系数;T为电机某转速下的最大输出转矩。
一般模式的电机转矩负荷曲线如图6所示。

图6 一般模式的转矩负荷曲线
2.4 经济模式转矩控制
纯电动汽车的经济模式旨在满足驾驶员驾驶意图的同时,提升汽车的经济性,延长汽车的续航里程。从电机的外特性出发,寻求电机的最佳工作曲线[9],进而设计加速踏板开度与转矩负荷系数的对应关系曲线如图7所示。经济模式下的电机输出转矩为:

式中,ls为某加速踏板开度下的电机转矩负荷系数;Tmax为电机某转速下的最大输出转矩。
3 控制策略的仿真验证
在Matlab/Simulink中建立纯电动汽车整车仿真模型,通过设置不同的加速踏板开度来验证转矩优化控制策略在汽车加速过程中的正确性和合理性。
该纯电动汽车的整车参数及动力系统参数如表3所示。
表3 纯电动汽车主要参数

仿真设置了2种不同的加速踏板开度工况(工况1和工况2)。纯电动汽车在2种工况下的仿真结果如图8和图9所示。

仿真结果表明,当驾驶员猛踩加速踏板时,控制策略能够准确识别出动力模式,在短时间内提高转矩输出,加速性能显著增强。当驾驶员缓慢踩踏加速踏板时,控制策略识别为经济模式,电机输出转矩减小,提升了整车的经济性。
通过对传统线性控制策略与本文控制策略仿真结果的对比分析,得到不同工况下的加速时间和单位里程能耗。工况1为(0~40)km/h加速时间对比如表4所示,工况2为(0~40)km/h单位里程能耗如表5所示。
表4 工况1加速时间对比

表5 工况2单位里程能耗对比
从表4中可以看出,本文所研究的根据驾驶意图对电机输出转矩进行优化的策略,能够使加速时间缩短;从表5中可以看出,同样加速到40km/h的车速,通过转矩优化可以大幅度降低能耗,提升整车的经济性。
4 结论
通过对2种加速踏板开度工况的仿真分析,所研究的转矩优化控制策略,能够准确识别驾驶员的驾驶意图,并且切换到合适的加速模式,提高了整车的动力性和经济性。当驾驶员对加速踏板快速踩踏时,转矩优化控制策略识别出较强的加速意图,选择动力模式提高电机输出转矩,来达到快速提升车速的目的;当驾驶员对加速踏板缓慢踩踏时,转矩优化控制策略识别出驾驶员的加速意图较缓慢,选择经济模式适当降低输出转矩,提升整车的经济性。
[1] 赵轩,肖广朋,马建,汪贵平.纯电动汽车驱动控制器研究与开发[J]. 科技导报,2012,30(06):30-35.
[2] 徐飞,梁缘,李丹林,王玉姣,李康.基于模糊逻辑的电动汽车驾驶意图设计及应用[J].汽车科技,2017(02):18-22.
[3] 王立国.纯电动客车动力总成控制策略研究[D].吉林大学,2009.
[4] LIU H W,GUO W W,CHU L, et al.Transient optimization of drive control strategy for pure electric passenger car [C]//2011 Internati -onal Conference on Electric Mechanical Engineering and Informa -tion Technology.Piscataway,USA: IEEE,2011:1025-1028.
[5] 陈龙,程伟,徐兴,孙晓东.基于模糊控制的纯电动汽车加速输出转矩优化控制策略[J].汽车技术,2015(04):56-61.
[6] 徐凯,牛志刚.纯电动汽车加速转矩控制优化策略[J].机械设计与制造,2016(09):50-53.
[7] 邓元望,郑潮雄,曾俊,高洋.纯电动汽车转矩动力性能优化控制研究[J].计算机仿真,2017,34(01):132-137.
[8] Lu D K, Li W M, Xu G Q, et al. Fuzzy logic control approach to the energy management of Parallel Hybrid Electric Vehicles.IEEE Con -ference on Information and Automation. 2012:592-596.
[9] 熊会元,何山,查鸿山,朱雄来.双轴驱动纯电动汽车驱动转矩的分配控制策略[J].华南理工大学学报(自然科学版),2018,46(11):117- 124.
Torque Optimization Control Strategy for Acceleration Process of Pure Electric Vehicle
Ma Xiaonan1, Ji Chunyu2, Wei Shangjun2, Qin Jirong2, Zheng Weiguang1,2
( 1.School of mechanical and electrical engineering, Guilin University of Electronic Technology, Guangxi Guilin 541004;2.Dongfeng Liuzhou Motor Co., Ltd, Guangxi Liuzhou 545005 )
Aiming at the problem that the motor output torque of pure electric vehicle cannot accurately express the driver's driving intention during acceleration, a torque optimization control strategy based on fuzzy control is proposed. In order to accurately identify the driver's driving intention in the process of acceleration, a fuzzy controller with the vehicle speed deviation and the change rate of accelerator pedal opening as the input variable and the driving intention coefficient as the output variable is established to identify the driver's acceleration intention, and the acceleration mode of the car is designed as three modes: power mode, general mode and economic mode. The power mode adopts hard pedal curve control, and in order to improve the acceleration performance of the vehicle at low speed and rapid acceleration, the compensation torque based on fuzzy control is increased; the general mode adopts linear pedal curve control as the transition between power mode and economic mode; the economic mode adopts soft pedal curve control to improve the economy of the vehicle during acceleration. The simulation results show that, compared with the traditional linear control strategy, the torque optimization control strategy can accurately identify the driver's driving intention, and the vehicle's power and economy are improved.
Pure electric vehicle; Driving intention; Fuzzy control; Torque optimization; Compensation torque
10.16638/j.cnki.1671-7988.2021.04.001
U469.72
A
1671-7988(2021)04-01-06
U469.72
A
1671-7988(2021)04-01-06
马晓楠(1996-),山东临沂人,在读硕士研究生,就读于桂林电子科技大学机电工程学院,主要研究方向:纯电动汽车驱动控制研究。
