高速抓取并联机器人实验平台运动学建模与分析
2021-02-27陈修龙盛永超
陈修龙, 盛永超
(山东科技大学机械电子工程学院,山东青岛266590)
0 引 言
并联机器人具有刚度大、承载能力强、不存在累计误差、运动精度高、末端执行器运动惯量小等优点,目前并联机器人被广泛应用在医药、电子和食品等领域[1]。
近年来许多学者对不同的抓取并联机器人结构进行了研究。具有代表性的是Clavel 博士于1985 年发明的Delta机构[2],该机械手可以实现动平台的高速3维平动。叶伟等[3]提出了一种运动部分解耦2R2T并联机械手,并基于李群理论对机械手的运动学和性能进行了分析。汪满新等[4]提出了一种3-SPR 并联机械手结构,基于量纲-尺寸参数相对应的方法对机构的运动学及性能做了相关的研究。彭斌彬等[5]提出了一种新型2 自由度并联机械手实验平台,用无量纲参数的方法对机构构型及运动学进行了研究。张东升[6]提出一种5 自由度混联机械手并对该机械手的运动学、静力学和工作空间进行了详细的分析。张超[7]用螺旋理论分析了3-CUR并联机构的自由度,用几何方法分析了机构的正逆解,通过灵巧度指标对机构的工作性能进行了研究。周辉等[8]设计了一种6 自由度混联机械手结构,并用数值计算方法对机构的运动学和工作空间进行了分析。
本文基于提出的3-RRPaR 高速抓取并联机器人实验平台,对机构的运动学特性进行了分析,用闭合矢量法求解运动学反解,用数值法求解运动学正解,用Matlab 对运动学正、反解进行数值计算分析,用ADAMS虚拟样机仿真验证数值计算分析的正确性。整个计算仿真过程对新机构3-RRPaR 高速抓取并联机器人实验平台的分析和研究起到指导作用,为本机构的更深层分析研究提供理论基础。
1 机器人平台的运动学分析
1.1 机构特点与坐标系
本文所设计的3-RRPaR 高速抓取并联机器人平台其结构由静平台、动平台和3 条支链组成。每条支链包含主动臂和从动臂。支链中的主动臂与静平台通过转动副连接,从动臂与动平台通过转动副连接,主动臂与从动臂通过转动副构成的平行四边形构型连接。
为方便描述机构各部件之间的关系,设支链与动平台的连接点分别为A1、A2、A3,ΔA1A2A3是等腰三角形,底边长度是2m,高为n,在动平台上建立以O′A1为X′坐标轴,O′A2为Y′坐标轴,垂直动平台竖直向上为Z′坐标轴的局部坐标系O′-X′Y′Z′;设支链与静平台的连接点分别B1、B2、B3,ΔB1B2B3是等腰三角形,底边长度为2a,建立以OB1为X 坐标轴,竖直向上为Z 坐标轴,垂直O-XZ平面向里为Y坐标轴的全局坐标系。B2点到X、Y轴的距离分别为b、c,支链中主动臂的长度为l1i,从动臂的长度为l2i,其中i =1 ~3。主动臂与静平台的夹角为θi,具体如图1 所示。
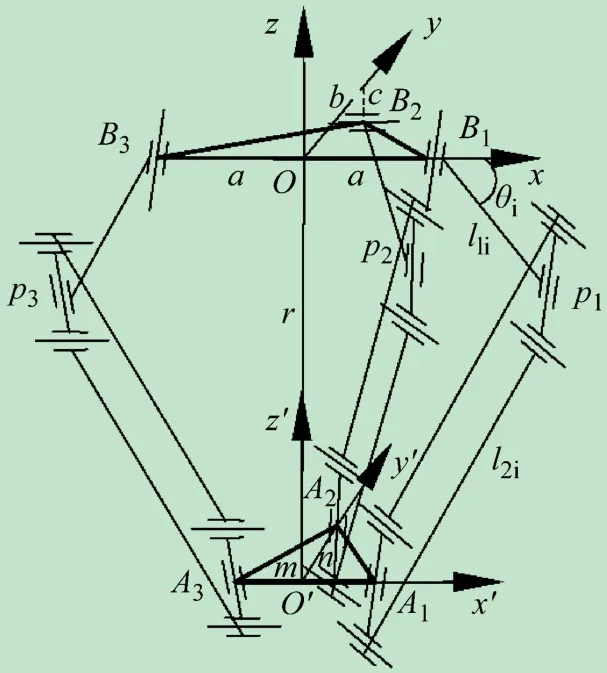
图1 并联机器人平台结构图
1.2 运动学反解
1.2.1 位置模型
机构运动学反解研究的问题是已知动平台轨迹方程,求解主动臂的角位移、角速度和角加速度的过程[9]。已知该并联机械手平台仅具有3 个平动自由度,故可将静平台和动平台视为质点[10-14]。
动平台形心在全局坐标系下O-XYZ下的位置矢量为r = [x,y,z]T,可表示为:

式中:ai、bi分别为支链铰点Bi、Ai在O -XYZ 和O′-X′Y′Z′下的位置矢量OB1和O′A1;l1i、l2i分别为支链主动臂和从动臂的杆长长度;ui和si分别为主动臂和从动臂的单位矢量。
Bi点在系O-XYZ下的位置矢量为:
Ai点在系O′-X′Y′Z′下的位置矢量为:
Pi点在系O-XYZ下的位置矢量为:
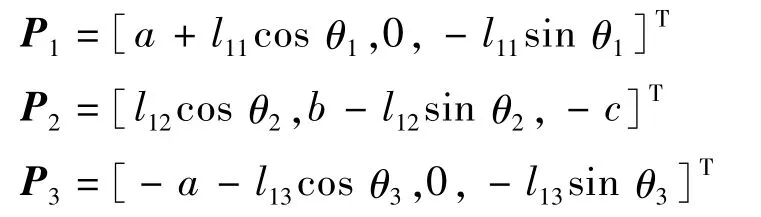
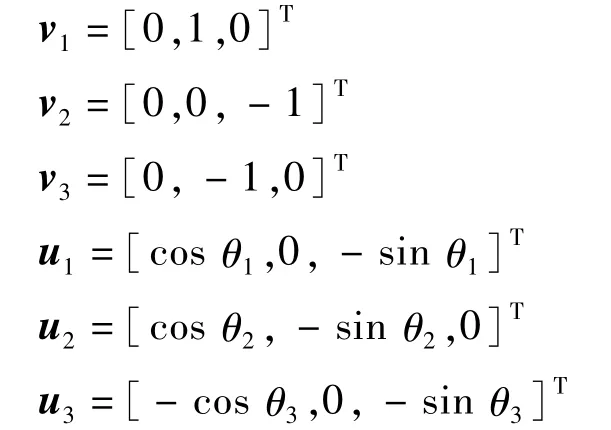
为了表达准确,引入单位矢量vi,vi的表示方法为:垂直主动臂的摆动面,使得vi×ui可以表示主动臂的旋转方向。ui的表示方法为:主动臂在系O -XYZ下的位置矢量与自身长度的比值,可得:
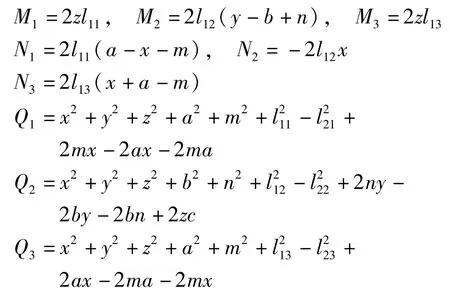
将式(1)化简,得到r -ai-l1iui+bi=l2isi,等式两端乘以各自的转置,可得:

代入r、ai、bi、l1i、l2i、ui,并转化成三角函数式Misin θi+Nicos θi+Qi=0 的形式。其中:
可得主动臂的角位移为:
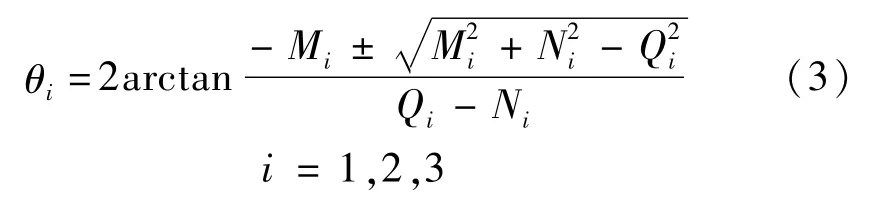
根据机构主动臂安装在机架下方的方式,可得式(3)中应该取“-”号。
由式(1)可以确定从动臂的单位矢量:

进而可得支链中主动臂与从动臂的夹角,可以由ui×si求得。
1.2.2 速度模型
对式(1)关于时间求导,可得:


将式(6)写成矩阵的形式,有:

即:

将式(5)两端右叉乘ωi,整理可得第i 个支链从动臂的角速度:

机构中各杆件为刚性均质杆,故第i 个支链从动臂质心速度可表示为:

1.2.3 加速度模型
将式(5)对时间求导,可得:

式中:ad为动平台的加速度矢量;为主动臂角加速度;vi×ui为可确定主动臂的旋转方向为从动臂的角加速度矢量。
计算化简并将速度结果代入式(11)中,整理可得主动臂的角加速度:

式中:

式中,E3为三阶单位阵
将式(11)两边同时右叉乘si,化简得第i 个支链从动臂的角加速度:

同时可以表示第i 个支链从动臂的质心加速度为:
1.3 运动学正解
机构运动学正解研究的问题是已知主动臂的输入夹角θi,求解动平台位置参数的过程[11]。由上面分析已知铰点Pi在系O -XYZ 下的位置矢量,则铰点Ai在系O-XYZ下的位置矢量为:

将式(15)各式统一写成:

式中,di1、di2、di3、di4为化简参数。
将式(16)化简消去平方项,可以写成:

若将x y看作是z的函数,则(17)可化简成一个二元一次方程组,两个未知数两个方程,方程能够求得唯一解,即:
式中,f11、f12、f21、f22为化简参数。
将式(18)代入式(16)中的任意一个,可以得到一个关于z的二元一次方程,即:

式中,g1、g2、g3为化简参数。

将式(20)代入(18)可以求得位置正解:

2 正反解分析验证
算例验证:设置机构的尺寸参数,见表1。
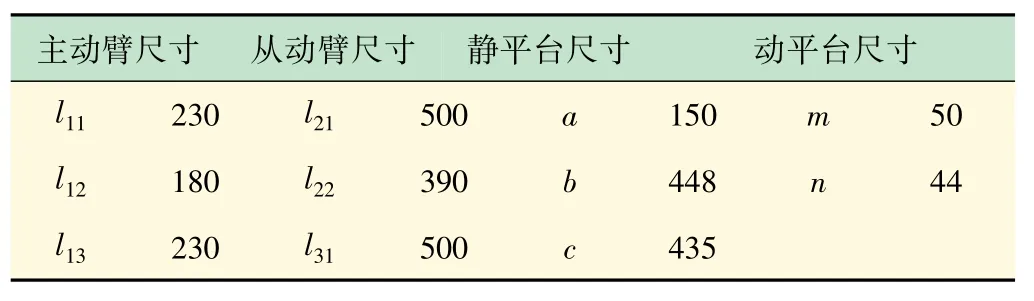
表1 机构尺寸参数 mm
由式(3)可知,给定一个动平台位置(x,y,z),对应的主动臂输入角度有8 组。例如,给定(x,y,z)=(-150,0,-540),可以求得8 组主动臂输入角度,见表2。
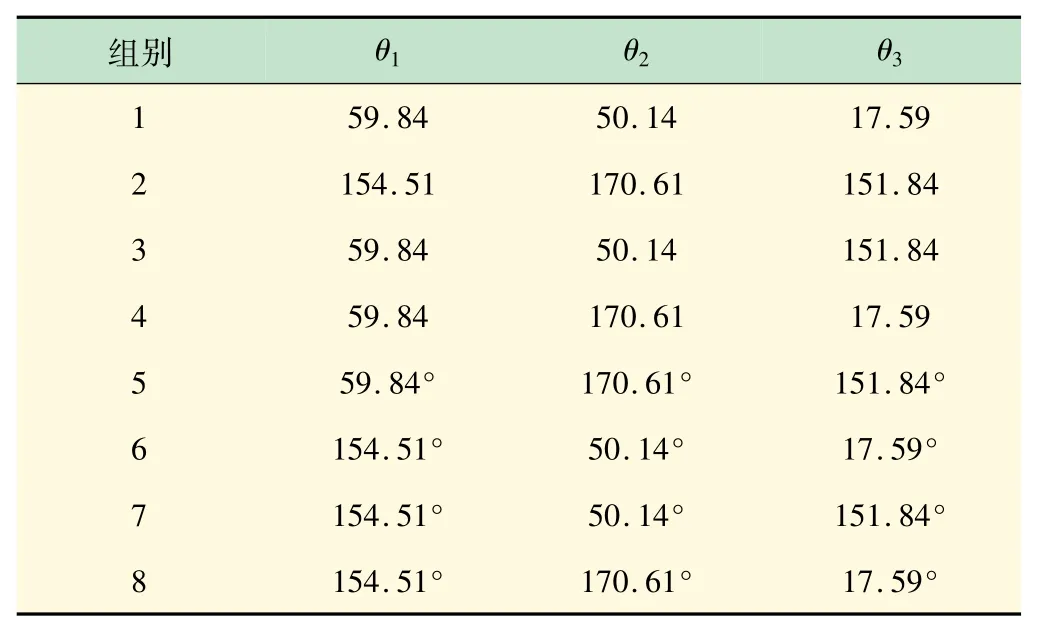
表2 主动臂8 组输入角度 (°)
表2 中:θ1为1 链主动臂与x轴正向的夹角;θ2为2 链主动臂与x 轴正向的夹角;θ3为3 链主动臂与x轴负向的夹角。从机构主动臂的装配方式来看,为保证机构有良好的性能,要满足3 个角度同时为锐角,因此可以排除掉2 ~7 组的解,将第1 组主动臂的输入角度θ1=59.84°、θ2=50.14°、θ3=17.59°代入正解式(21)中,可以求得2 组正解,见表3。

表3 第一组输入角度对应的2 组正解 mm
表3 中的两组解在空间的位置关于3 条支链主动臂下铰点形成的平面上下对称,平面下方的点与给定的动平台位置吻合,即为所求的正确的结果。
本文采用Matlab 对3-RRPaR 高速抓取并联机器人平台进行运动学仿真,求解在给定动平台轨迹下,主动臂和从动臂相关的运动特性,再用ADAMS 进行对比验证[15]。
给定动平台一个运动轨迹,如下:
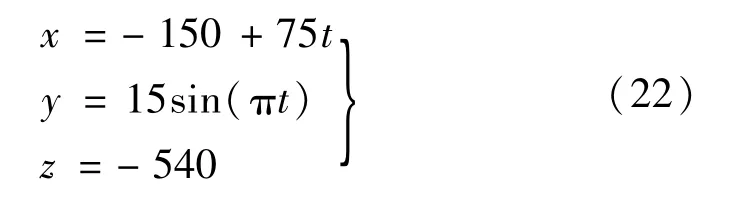
由图2 ~7 可知,Matlab 和ADAMS 图像中曲线的波动幅度和数值大小基本一致。第1、3 支链主动臂的角位移曲线走势平缓,数值大小在-0.7 ~0 和0 ~0.7之间变化,第2 支链主动臂的角位移曲线波动较大,在0 ~0.7 之间变化。第1、3 支链主动臂的角速度曲线波动较小,趋势缓和,数值分别在-0.25 ~-0.1 和0.1 ~0.25 之间变化,第2 支链主动臂的角速度曲线波动较明显,数值大小在-0.5 ~0.15 之间变化。第1、3 支链主动臂的角加速度在0 值上下波动,波动幅度较小,第2 支链主动臂的角加速度波动幅度明显,数值大小在-0.8 ~0.8 之间变化。
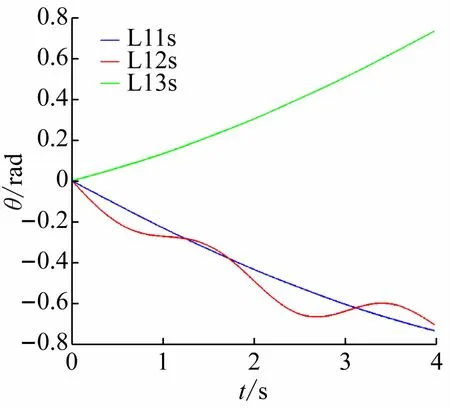
图2 Matlab主动臂角位移
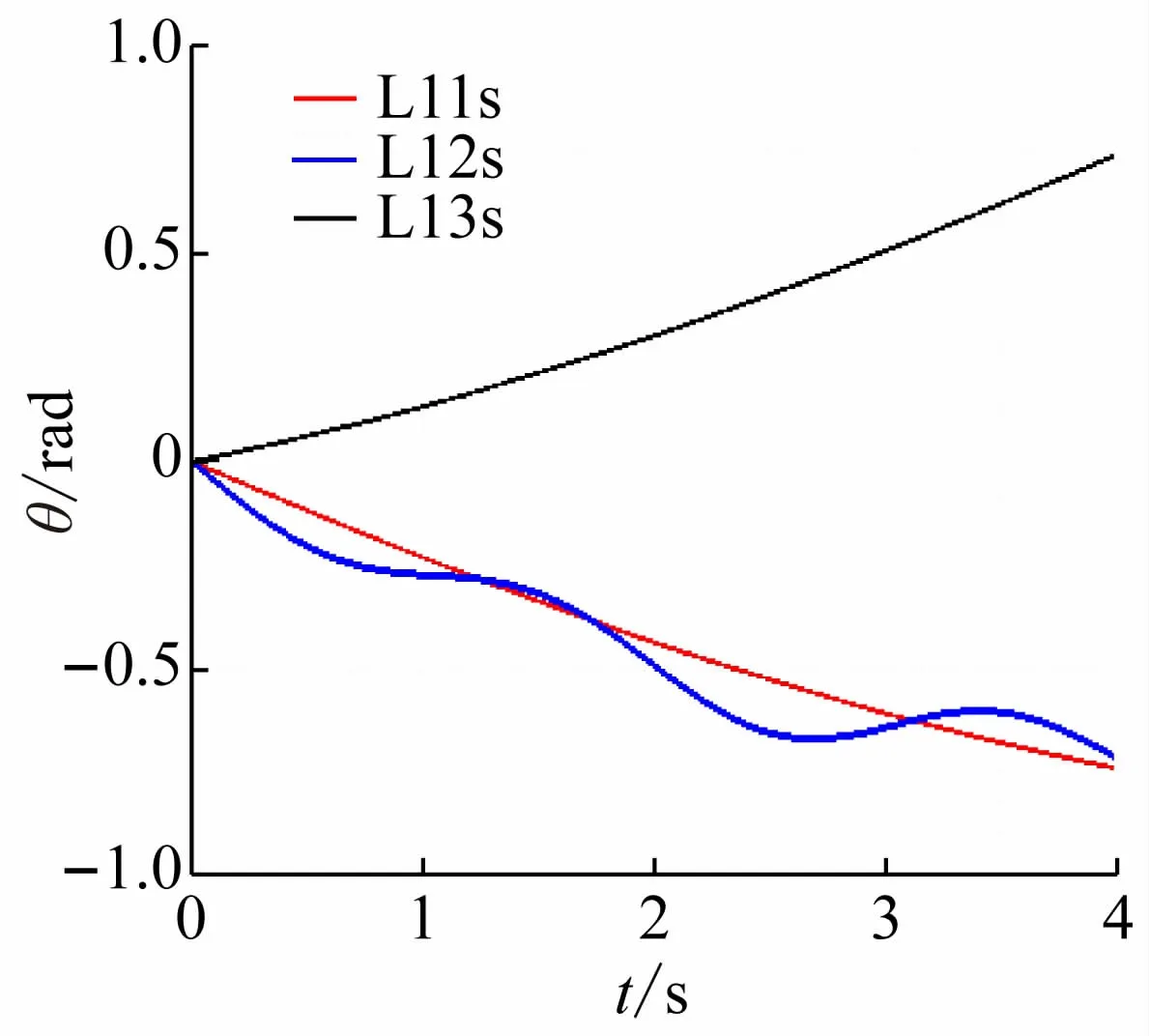
图3 ADAMS主动臂角位移
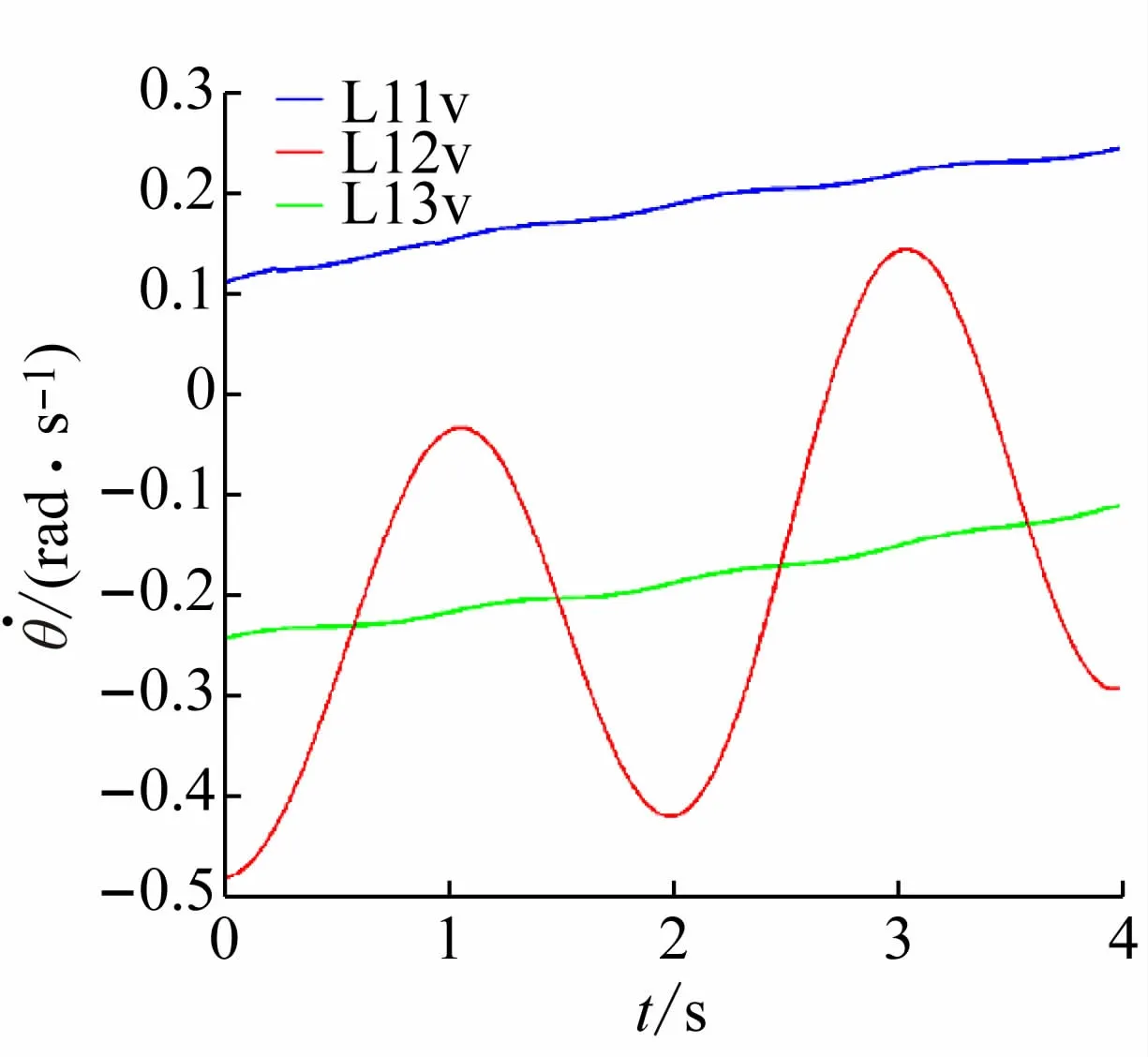
图4 Matlab主动臂角速度

图5 ADAMS主动臂角速度

图6 Matlab主动臂角加速度
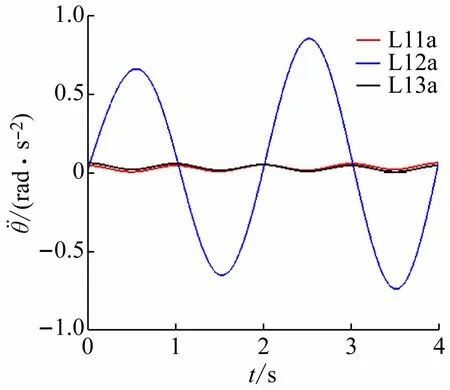
图7 ADAMS主动臂角加速度
由图8 ~15 可知,Matlab 和ADAMS 图像中各曲线的走势和数值大小基本一致。第1、3 支链的主从动臂夹角变化曲线无明显波动,数值大小在1.35 ~1.62之间变化,第2 支链的夹角变化曲线波动比较大,数值大小在1.45 ~1.73 之间浮动。第1、3 支链的从动臂角速度无明显波动,数值大小在-0.15 ~-0.07 之间变化,第2 支链从动臂角速度波动明显,数值在0.03 ~0.23 之间波动。第1、3 支链的从动臂质心加速度在0 值上下波动,波动幅度较小,第2 支链的从动臂质心加速度波动较大,数值在-150 ~150 之间变化。第1、3 支链的从动臂质心速度曲线重合,数值大小一样,波动幅度在-25 ~25 之间变化,第2 支链曲线波动幅度在35 ~70 之间变化。
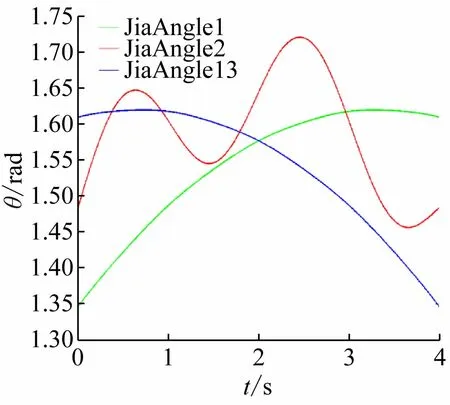
图8 Matlab主、从动臂夹角

图9 ADAMS主、从动臂夹角
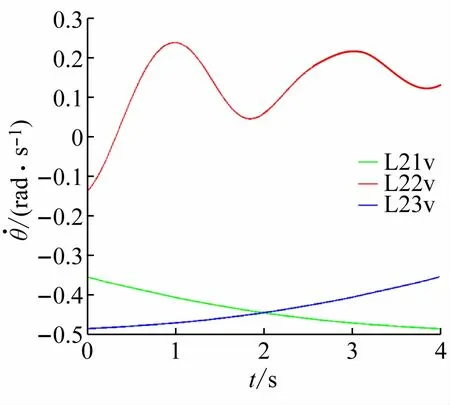
图10 Matlab从动臂角速度
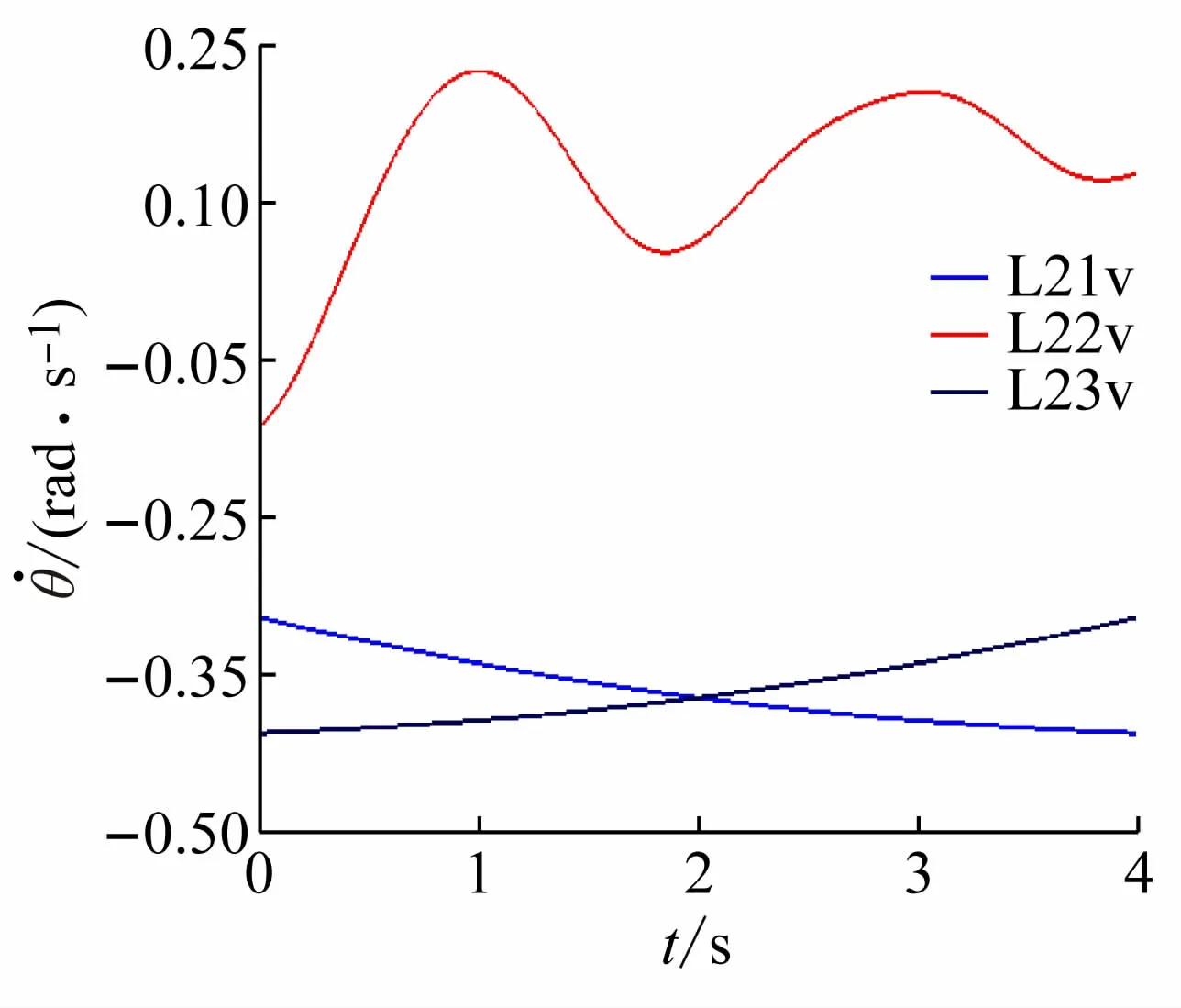
图11 ADAMS从动臂角速度

图12 Matlab从动臂质心加速度
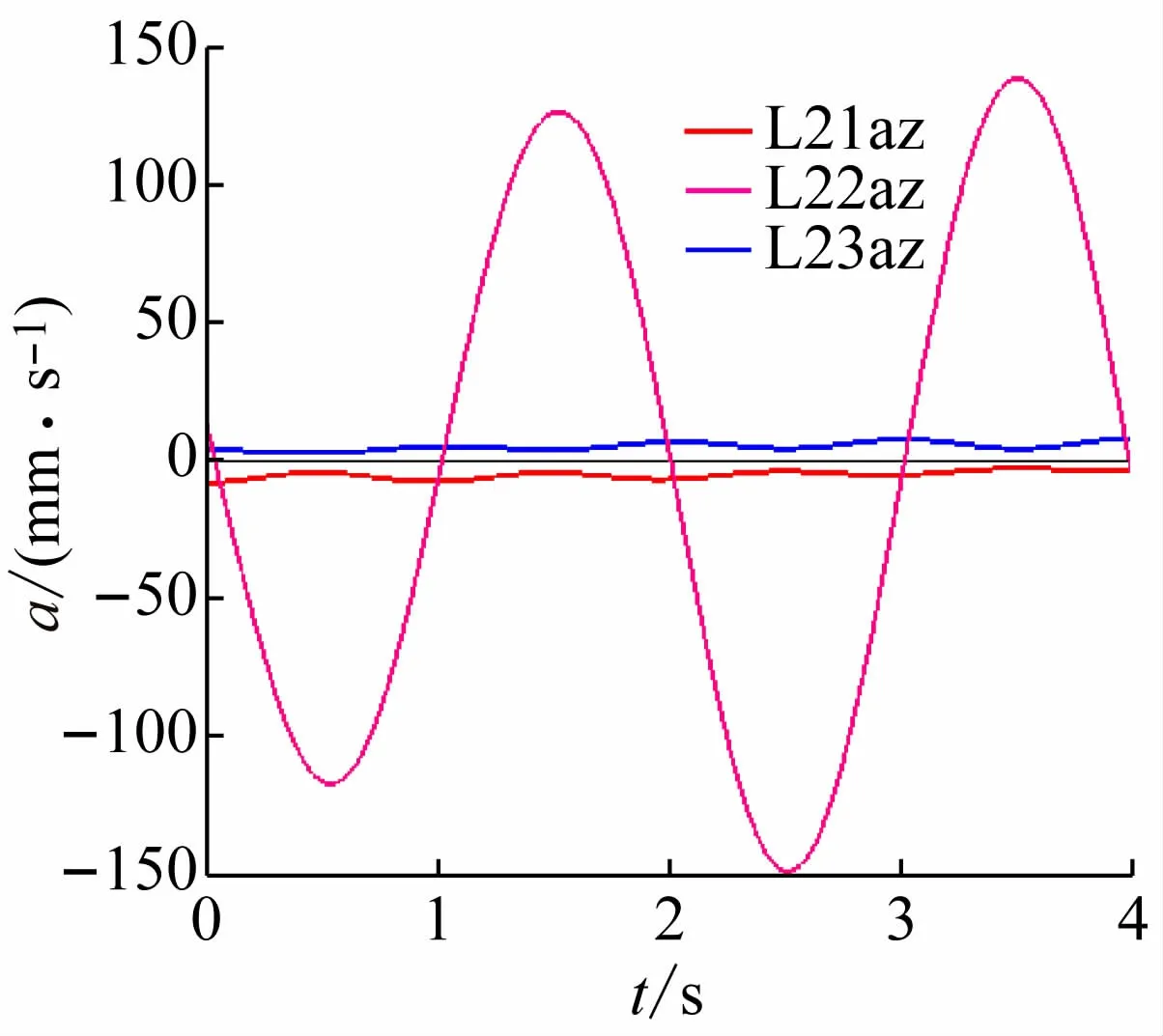
图13 ADAMS从动臂质心加速度
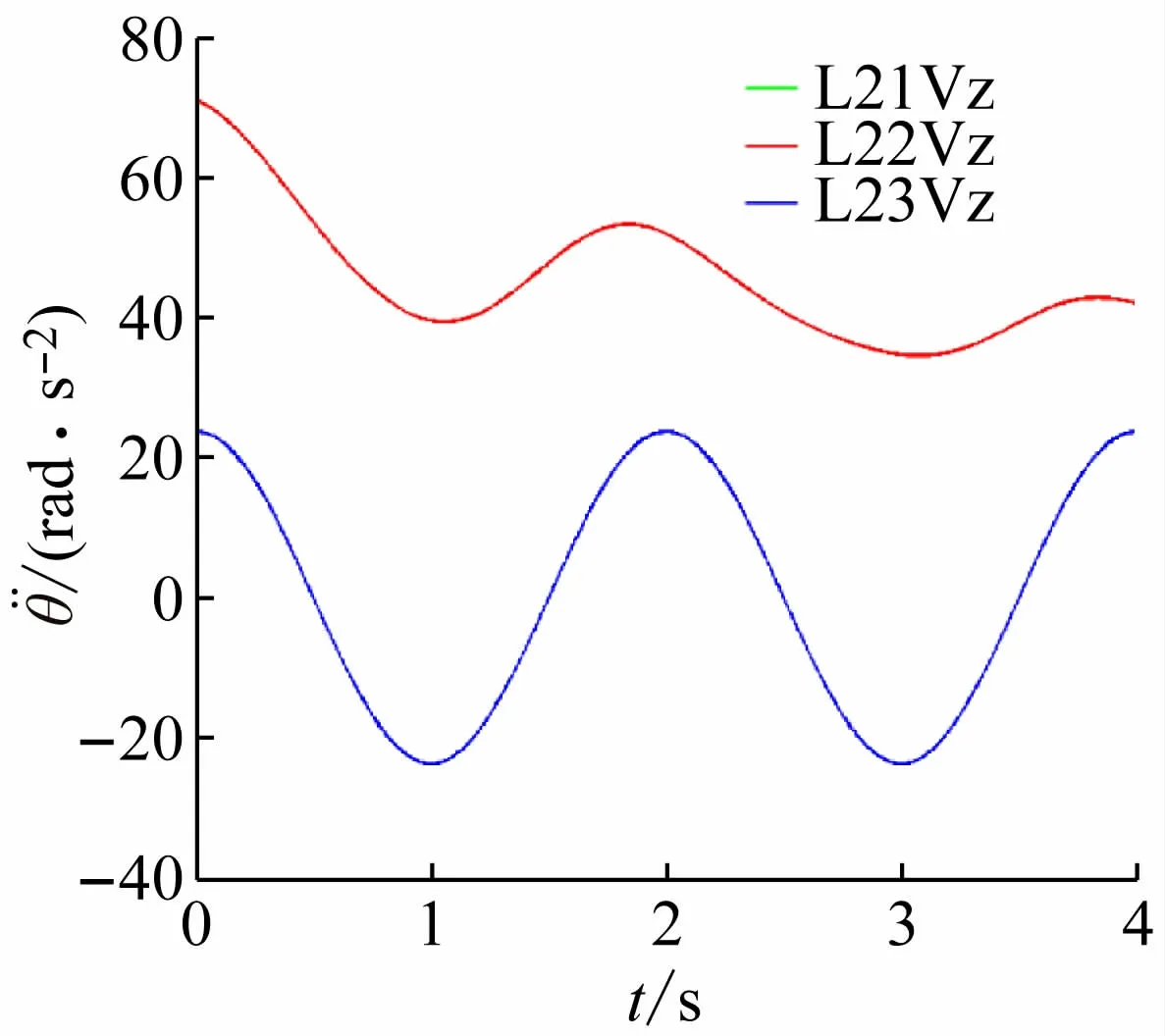
图14 Matlab从动臂质心速度
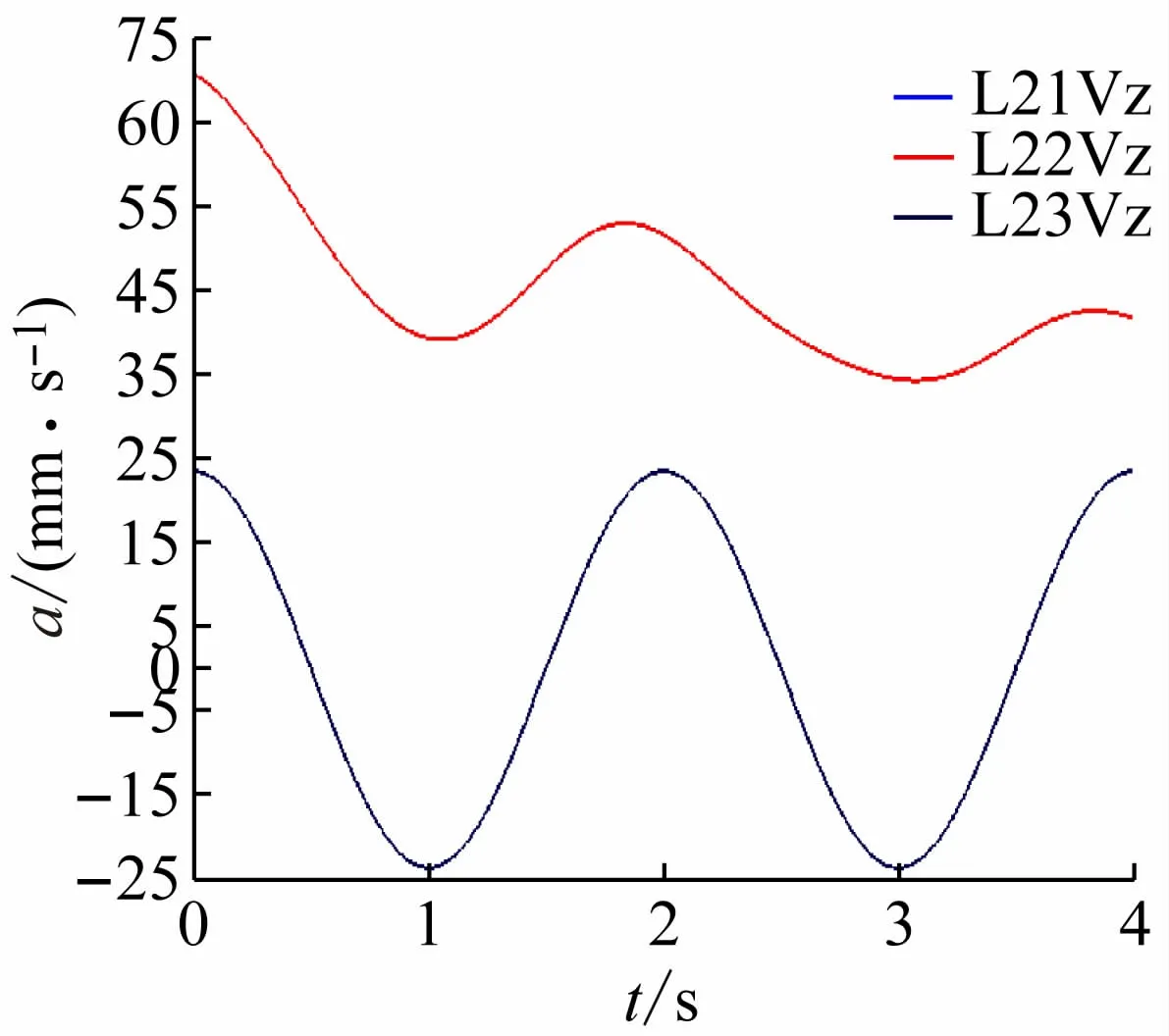
图15 ADAMS从动臂质心速度
在给定的运动轨迹下,3 条支链的运动学特性曲线为光滑、连续曲线,因此3-RRPaR 高速抓取并联机械手实验平台具有良好的运动学特性[16]。
3 结 语
本文对3-RRPaR 高速抓取并联机器人实验平台的运动学建模和分析进行了研究,基于机器人构型分析了机构特点,分别用闭合矢量法和数值计算法建立了机构的运动学反解和正解的数学模型,利用Matlab数值仿真和ADAMS虚拟样机仿真验证了运动学建模和分析的正确性。本文内容对高速并联抓取机构的分析和研究有指导作用,同时对后期实体样机的制作提供理论基础。