高精度地表三维位移自动化监测技术研究与应用
2021-02-03张思洪江德军
张思洪,江德军
(国能大渡河流域水电开发有限公司,成都 610000)
1 研究背景
在水电站的施工和运行过程中,为了保证水工建筑物及工程边坡的安全,需要对其进行高频率、高精度的变形监测[1-2]。但一般水电工程变形监测测点布设分散且数量众多、高差悬殊大,采用人工观测方法,存在需人多、耗时长、安全风险大、监测信息反馈慢,以及受雨、雾、雪、日光和大气折光影响其观测精度低或无法施测等技术难题,尤其是在工程遭遇有感地震、区域性暴雨、特大或超标洪水等灾害时,实时采集数据、反馈安全信息和及时决策问题更为凸显[3-4]。目前,国内外变形监测已具有一些研究成果,典型的如徕卡公司的GEOMOS就是最具代表性的监测系统[5-6],我国的测量工作者也在研发自动监测系统方面做出了许多探索和尝试,早在1977年中南大学张学庄教授就研制开发了“SMDAMS亚毫米级精度变形监测机器人系统”,提出了基线边实时校准解决亚毫米级精度测距的思想[7-8]。辰科公司研发的AMDS自动变形监测系统通过建立高精度的基准点实现了24 h连续无人自动监测[9-10]。武汉大学张正禄教授等也于2002年开发研制了GRT-DEMOS系统,并在三峡工程库区己东滑坡段进行了成功试验[11-12]。但纵观国内外变形监测发展现状,均停留在自动监测的阶段,未考虑监测的智能化、最优环境辨识、精密仪器野外保护等问题[13]。鉴于此,有必要在外部变形自动化测量方法、监测方案、仪器野外保护、自动化控制和监测数据实时采集分析处理等方面开展研究。
2 整体构架
本文结合当前变形监测自动化现状,提出了测量机器人(TPS)基线边差分与气象融合改正测量法,以提高复杂气象条件下变形测量精度。同时为充分发挥测量机器人及GNSS各自优势,提出了测量机器人与GNSS定位监测相结合的监测方案,并研发了相应的一体化智能测站与监测测点保护装置,开发了外部变形数据采集、分析、测站控制系统,将外部变形自动化监测数据采集、成果实时输出、异常值报警等集成为完整的监测系统,实现了自动化监测的快速预警和应急处理。
传统的外部变形自动化监测系统,单独采用测量机器人和GNSS定位方法均存在一定局限性,如全站仪仪器与监测点必须通视,恶劣气候如雨、雪、雾和强日照等条件下其精度会受到影响(甚至无法监测),GNSS定位监测垂直位移精度较差,且监测成本较高。针对以上特点,为了达到地表三维变形的自动化监测对精度与时效性的要求、规避2种常规监测手段的缺陷,本文采用测量机器人与GNSS组合监测的方式,即以测量机器人监测为主,GNSS卫星定位测量法为辅的监测方案。同时,为提高测量机器人在复杂气象条件下的测量成果精度,提出基线边差分与气象融合改正测量法,配合自主研发的智能测站系统对观测条件的自主判别等,可显著提升测量成果质量。基于互联网平台开发大坝变形智能监控系统,包括大坝变形监测智能测站系统及大坝变形监测智能采集分析系统2大部分:大坝变形监测智能测站系统主要负责智能测站的控制、最优观测时段的选择等;大坝变形监测智能采集分析系统负责控制全站仪进行数据采集,并实时分析计算测量成果。同时,集成GNSS解算成果,对重要测点、测量机器人无法观测的测点进行实时监测,并定期对测站稳定性、基准点稳定性进行分析检校,确保整套系统的可靠。
通过该套系统将大坝变形监测的监测任务制定、监测点数据采集到监测任务结果分析一体化自动实施,做到数据实时报播、数据及时分析、直接报表生成、直接控制、自动报警等,同时预留接口与信息管理分析软件有效结合,实现自动化监测的快速预警和应急处置决策,其总体构架如图1所示。
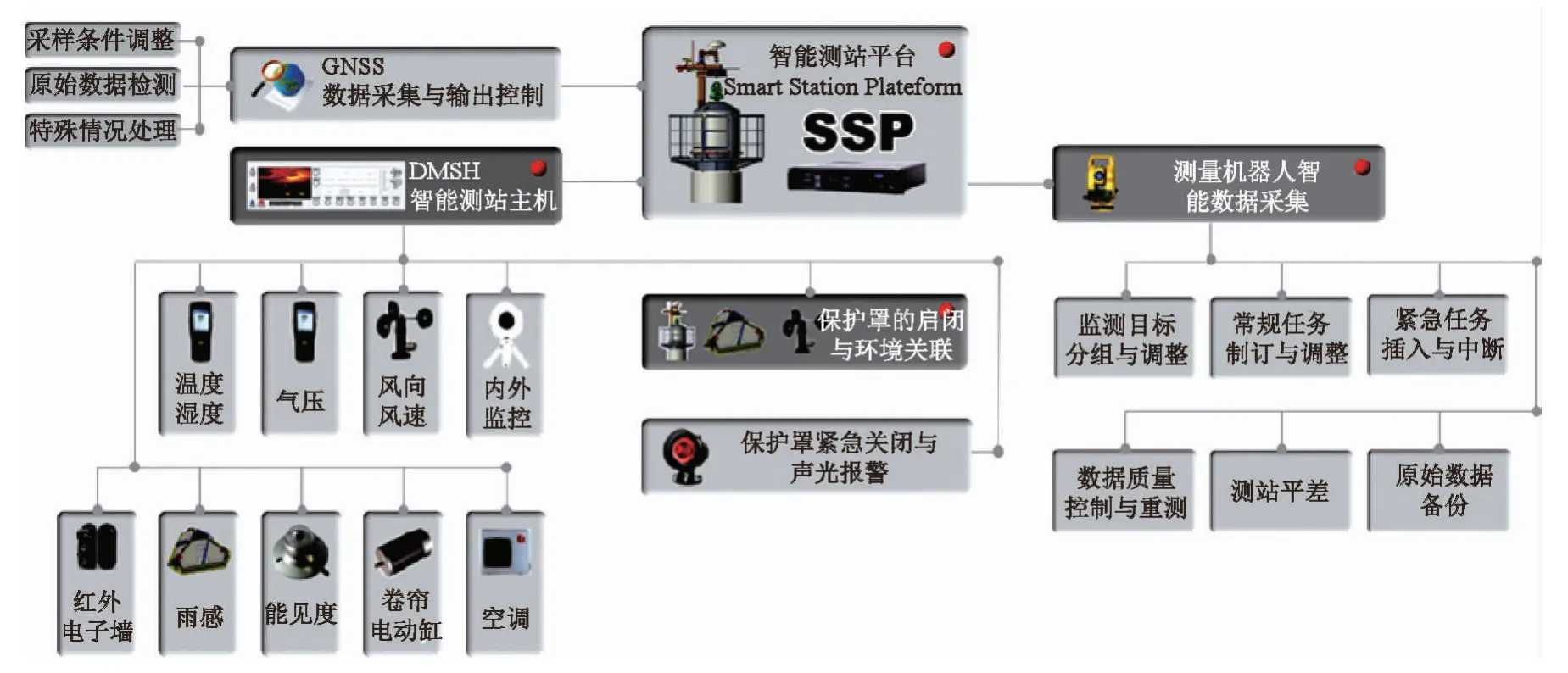
图1 地表三维位移智能监测系统整体构架Fig.1 Framework of the intelligent 3D surface displacement monitoring system
3 系统研发及结构设计
3.1 数据采集分析系统研发
3.1.1 测量精度保障
对于精密测量而言,空气中各点大气密度不均将造成测量水平角、垂直角和距离误差。水电站一般地处高山峡谷区,大气密度更加不均,采用何种方法能有效地削减或消除大气折光影响,提高变形测点三维位移测值精度,是实现外部变形监测自动化好与坏的关键。
本文提出通过在变形体周边稳定的岩基上设置若干个测量机器人校准基点,按照测点分布进行分层分组观测,并实时采集气象参数及基线边数据用以改正每个监测点测得的原始数据,消除或减弱大气折光对测量精度的影响。为提高监测点与校准基点的共性,提出利用分层(分组)的方法,缩小改正范围,拉大不同分组测点的差异,提高同一组内测点的共性,进一步提高基线改正精度。同时,为减小单一后视点带来的偶然误差,选择多个后视点,构建多后视观测法,实际测量时取各后视点观测归零方向的均值,以提高观测的精度。另一方面,采用GNSS卫星定位测量法为辅,在测站、校准基点、后视点等部位安装GNSS天线,能够校核全站仪监测系统稳定性,实现各种地表外部变形的全天候监测,满足精度要求。同时各测点设置有强制对中与调平装置,棱镜和GNSS天线安装时可调平,并做到同心布设,仪高也可设为定长,进一步减少了测量误差。
3.1.2 全天24 h不间断监控
采用测量机器人为主、GNSS卫星定位测量法为辅的水电站大坝及边坡外部变形远程自动监测方案,重要部位测点同时布置棱镜、GNSS测点天线,弥补了恶劣气候如雨、雪、雾和强日照等外界环境对全站仪测量精度的影响;采用伺服电动缸升降杆启闭,开发了与全站仪自动化观测同步的控制软件,解决了全站仪测站全天候实时启动及野外保护问题;同时满足了全站仪自动和人工2种测量方式,对测量数据进行必要的判断、校正。
3.1.3 数据采集分析系统集成
研发了全自动在线地表三维位移监测系统,建立数据中心平台,满足一个或多个大坝数据的接收与统一分析处理。系统以信息中心数据平台为主体,收集数据采集汇总、数据预处理、平差、信息发布(满足远程方式的信息通报)。数据的采集采用多种方式实施:单站数据采集、多站数据采集、一个大坝采集、多个大坝同步采集等。平差采用多种方式处理(角度修正、距离修正、极坐标、前方交会、后方交会等),力求反映建筑物的真实变形。平差处理完成后自动生成多种形式的报表,并可实现本地或远程实施历史演变过程的比对分析,建立独立的手机网络平台并依附互联网实施实时数据采集监控、历史数据演变过程比对分析、每天监测的整体报表等,方便各个层级技术人员全面细致地了解大坝的情况,为分析决策提供最为准确的一手数据资料。
采集系统除用于按任务定义的观测模式控制全站仪完成数据采集、限差实时判断工作外,还集成了气象条件(风力、雨感、温湿度)智能采集、判断系统,以及观测站启闭罩智能控制系统、监视系统、断电远程恢复等。采集合格的数据既发往远端中心数据平台,也会本地保存,保证数据安全;中心数据平台用于定义相关配置参数,如全站仪类型定义、监测点测量模式定义、野外观测数据限差设置、观测点组编辑、观测任务定义、观测任务下发、多坝、多观测站监测数据统一存储管理等功能。监测点测量模式定义灵活,既可按国家规范观测要求定义,也可根据实际情况由用户自行定义;大坝变形分析系统用于数据的后处理工作,包括各观测站原始数据内业限差判断、原始观测数据修正(距离、水平角、竖直角),单站平差或双站前方交会平差处理,平差成果入库、查询,变形曲线展示,并生成相关的图形报表、文字报表、或定制报表等。
3.2 智能测站系统研发
3.2.1 大视场角及集中管控
研发了基于大视场角及多类型仪器设备集成集中的一体化智能测站,测站水平方向视场角达到335°左右,竖直方向视场角达到-45°~35°,增加了测站可监控范围,以减少投入更多测站所需费用。以集成化产品设计理念在一体化测站中集成气象、空调、伺服电缸、测量机器人、棱镜、GNSS天线、视频监控系统以及各种光电转换设备于一体,实现了多类型仪器设备的集成化管理。
3.2.2 远程智能控制
开发了与测量机器人自动化观测同步的“测量机器人监测站一体化控制系统”,解决了测量机器人测站全天候实时启动问题,实现了升降窗的定时及手动临时启闭。通过智能测站系统,在测量任务开始前,一体化测站升降窗预先自动打开,使测量机器人适应外部环境。测量任务结束后,一体化测站升降窗口立即关闭,以保护测量机器人免受损坏。同时,满足了精密仪器的野外防盗、防雷、防打砸等要求。
3.2.3 测站状态远程监控及温湿度智能调控
一体化测站内的精密仪器均长期位于野外测站内,测站内温、湿度随着季节周期性变化,年变幅>50℃,这极不利于全站仪等精密仪器的长期稳定运行。同时,测站内的各类仪器运行状态直接影响着测量数据的精度及可靠性,因此在测站内设置了温、湿度调节及视频监控系统,实现了测站内温、湿度调控,确保仪器长期稳定运行。
3.2.4 一体化测站智能控制与测量
目前,一般的测量机器人测站无法智能判断外界环境,遇到雨、雪、雾时,监测数据将严重失真,影响对大坝及边坡变形情况的正常监测,同时,监测系统均按照定时、固定频次采集监测数据,在特殊工况下适应性较差。鉴于此,提出了采样频率自适应、观测时段自寻优、应急场景自识别、最优模型自匹配、精密仪器自防护功能。其中采样频率自适应是指在边坡或大坝变形加剧时自动将监测频次增多,采集更多的数据反馈工程安全,在变形平缓时频次自动减少;观测时段自寻优是指自动选择最适合的测量时间启动测量任务,如选择降雨间隙、大雾天气的间隙等,同时可记录历史情况,逐步迭代寻优;应急场景自识别是指关联地震、洪水等信息,在大洪水、地震等场景下,自动识别上述场景,自动启动加密监测或应急监测;最优模型自匹配是指根据当前外界条件,自动匹配最优处理模型,如当特殊天气无法实现交汇测量时,自动按照极坐标处理;精密仪器自防护是指精密仪器长期置于野外,该套技术可实现精密仪器的野外安全防护、设备状态实时监控,非法破坏等声光报警,信息推送等。
3.3 精密仪器野外保护
由于GNSS测点天线、测点棱镜均为野外布设,防盗、防雷、防打砸等问题严峻。鉴于此,设计了棱镜测点及GNSS测点保护装置(如图2),将测点棱镜、GNSS测点天线设置同一形体尺寸的保护罩与狭窄的棱镜观测窗口,采用内部螺栓固定方式和专用工具启闭,有效解决了野外测量仪器安全防护与防盗难题。
4 系统建设及运行情况
4.1 系统建设
本系统目前已在瀑布沟水电站坝前、坝后2个测站进行了应用。瀑布沟水电站是大渡河流域梯级规划中的第17个梯级,工程拦河大坝采用砾石土心墙堆石坝,最大坝高186 m。水库正常蓄水位850 m,汛期运行限制水位841 m,死水位790 m,消落深度60 m,总库容53.37亿m3,为不完全年调节水库。瀑布沟大坝坝后外部变形监测自动化系统建设共计49个测点,坝前外部变形自动化系统共计39个测点,采用了10套徕卡GNSS设备(GMX902接收机/GM10接收机+AR10天线),2台TM30(0.5″)全站仪作为数据采集设备,2种测量方式相互校对,互为补充,分别对大坝坝顶、坝后坡及大坝坝后左右岸边坡、坝前拉裂变形体、古拉裂体、GIS楼边坡、老柯玛边坡及部分平面控制网点进行自动化监测。
坝后外部变形自动化监测系统自2014年7月29日正式投入试运行后,坝前外部变形自动化监测系统自2015年12月投入试运行,自动化监测系统运行稳定,可对测点进行全天不间断实时观测,不受日照光线、雨雾等天气的影响且数据平稳,监测精度较高,并实现了自动化采集数据、远程集中管控。

图2 一体化测点保护罩效果Fig.2 Drawing of protective cover for integrated measuring point
4.2 系统可靠性及测量精度分析
以2014年7月29日启动试运行的瀑布沟坝后变形监测自动化系统为例进行分析,通过现场测试及试运行,该自动化监测系统运行良好,TM30全站仪及GNSS两种监测系统测量结果与人工测量数据吻合,且规律性更好。
图3为坝顶TP11、TP13测点上下游方向位移过程线。从上下游方向位移量自动化监测数据与库水位的关系曲线可以明显看出,TP13和TP11两个点的上下游方向位移量与库水位关系密切,当库水位上升时,其上下游方向的位移量增大,当库水位下降时,其上下游方向的位移量下降。这一变形规律与前期人工观测数据相吻合,且从过程线来看,数据跳动小,测量精度较高。

图3 坝顶TP11、TP13测点上下游方向位移过程Fig.3 Process lines of displacements in upstream and downstream directions of TP11 and TP13 measuring points on dam crest
图4为坝顶TP11、TP13测点沉降位移过程线。由沉降位移监测数据与库水位的关系曲线可以看出,各测点垂直方向的位移量受库水位影响不大,各监测点的沉降位移呈现线性增加的趋势,说明坝体在逐渐沉降,符合土石坝变形一般规律,且过程线较为平滑,测量精度能够满足土石坝及一般工程边坡监测的需要。

图4 坝顶TP11、TP13测点沉降位移过程Fig.4 Process lines of settlements of TP11 and TP13 measuring points on dam crest

图5 坝顶TP13测点同轴测量机器人及GNSS数据上下游方向位移过程Fig.5 Curves of displacements in upstream and downstream directions of TP13 on dam crest measured by coaxial measuring robot and GNSS
图5为坝顶TP13测点同轴测量机器人及GNSS数据上下游方向过程线,当选取统一基准值时,2条过程线基本重合,说明GNSS与测量机器人测值吻合度较高,测量精度符合要求。
4.3 自动化系统与前期人工精度对比
通过对比自动化系统与前期采用TCA2003人工观测点位中误差可以看出,典型测点TB02、TB03、TB07三个测点自动化系统测量数据点位中误差的各项指标比人工测量数据点位中误差的各项指标要低,见表1。

表1 自动化与前期人工测量精度对比Table 1 Comparison of accuracy between automation and early manual measurement
同时,从长时间监测可知,大坝左右岸方向变形与库水位相关性较小,在短时间范围内,可认为大坝左右岸方向各测点未发生变化,则该时间段内所有测点变化量均应在0附近波动。从左右岸方向位移量自动化监测数据与库水位的关系曲线(图6)可以得知,各监测点的数据沿坝轴线方向发生的位移量基本都在0上下波动,这一规律与往年的人工测值位移量变化规律相符,也满足土石坝坝体变形的一般规律。

图6 主监测断面左右岸方向位移与库水位的关系Fig.6 Relation between the displacement in left and right bank direction of the main monitoring section and the water level fluctuation
5 结论与展望
本文结合当前外部变形自动化监测系统的不足,提出了集成测量机器人与GNSS定位的监测系统方案,并提出了相应的一体化测站与测点保护方案。同时,构建了以全站仪分层差分与气象融合改正测量法为主、GNSS卫星定位测量法为辅的地表三维位移高精度自动监测系统,将外部变形自动化监测数据采集、成果实时输出、异常值报警等集成为完整的监测系统,实现了自动化监测的快速预警和应急处理。通过对应用工程实例的数据分析可知,该外部变形自动化监测系统运行可靠,实测精度较高,满足土石坝及一般工程边坡外部变形监测的需要,可为类似工程外部变形监测自动化系统建设提供可借鉴的经验。但该系统也存在需继续改进完善之处,主要表现在:
(1)目前测量机器人监测自动化系统部分后视点未同步进行GNSS共点监测,无法借助GNSS测量数据对后视点稳定性、兼容性进行检验。且该方法有假设前提,即测站、后视基准点稳固可靠或其稳定性可做检验校核,后视点与监测点存在共性误差,但这往往是难以实现的。后续仍需在差分改正前对测站点、后视基准点的稳定性和兼容性进行检验校核,以便进一步提高极坐标差分模型的准确性。
(2)该方法在三角高程方面精度仍不能完全达到二等变形监测的要求,在混凝土坝三维变形监测上仍有限制,需进一步研究提高竖向监测精度的方法。
