基于滑模算法的激光测量平台动静态误差补偿仿真
2021-01-24赵炳巍刘一鸿
孙 瑜,贾 峰,曹 岩,赵炳巍,刘一鸿
(西安工业大学 机电工程学院,西安 710021)
0 引言
自主搭建激光测量平台,以点激光位移传感器作为测量手段,下位机通过CAD设计基础框架,以4个二项混合步进电机作为X、Y、Z、C轴运动手段。整体结构如图1所示。二项混合电机因其具有精度高、价格低廉、效率高等优点被广泛应用于制造、娱乐、测量、航天等各个行业,对于一些精度要求不是很高的厂家来说,因为二项混合电机具有“让走多少就走多少”的特点,所以节省了很多闭环所需元器件的成本的控制难度,只进行开环控制。但是随着现在众多行业对于精度要求的要求越来越高,且订单量大、工作时长的增加以及一些工作中产生的不确定性因素,开环的控制方法已满足不了部分行业的需求(比如精密测量)。以自主搭建的点激光位移测量装置为背景,提出对二项混合电机进行静态综合误差建模,动态滑膜闭环控制的方法以达到对二项混合步进电机实现动态误差补偿的目的,进一步提高控制精度,确保电机系统可以精确稳定的运行。
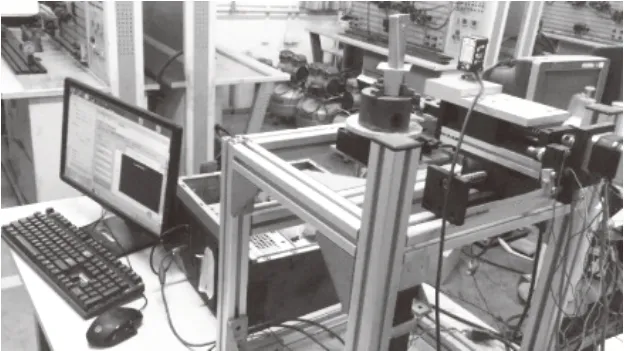
图1 点激光位移测量装置
1 静态误差综合数学建模
静态误差一般与结构的刚度、安装制造加工精度、结构变形等有关[1]。在实际的应用过程中,步进电机不可能单独使用,往往和其他装置进行装配后使用(比如滚珠丝杠)因此不可避免的就会产生静态误差。在电机的闭环控制系统当中,本文以滚珠丝杠装载单步进电机为例如图2所示,对静态误差进行分析建模。
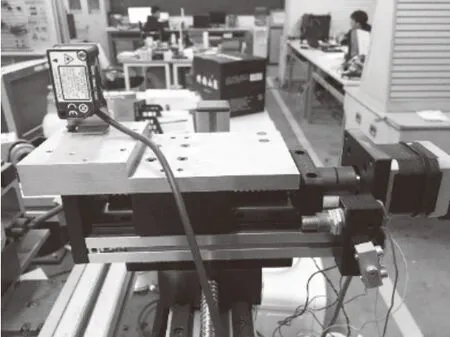
图2 滚珠丝杠结构
1.1 静态误差分析
在制造和加工行业,任何零部件的加工和生产都不可能没有误差的存在,因此在滚珠丝杠也会存在螺距误差和反向间隙。步进电机是依靠PC机传输给驱动器的脉冲数再翻译成角位移进行驱动的,这种静态误差的存在会影响其定位精度。如图2所示,设电机初始位置为A,经过时间s之后达到B,但由于其中静态误差的存在可能会使电机达到B1,此时若再给电机一个回程的指令,使电机达到C点,则由于误差的存在只能回到C1点。忽视长时间使用因重力产生的直线度误差,忽视滚珠丝杠的热变形误差,将其余误差综合考虑。
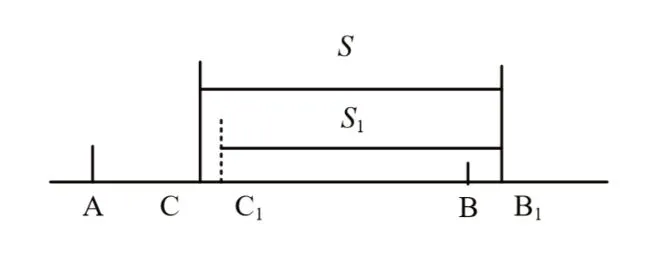
图3 定位误差
1.2 静态误差综合模型
由于各个误差之间没有线性关系,互不影响,对于综合误差的建立可以通过采用某些外部测量设备对不同位置的误差进行有限次的测量,分析和拟合误差的变化趋势,对不同目标位置实现不同的补偿量[1]。
多项式回归方程有一个显著的特点,任何的曲线都可以根据阶次的不同进行拟合处理。当测量样本为n时,在理论上可以通过n-1阶多项式对数据进行拟合[1]。
设e为因变量,x为自变量,将e与x之间的关系通过多元线性回归方程进行表达,即为:
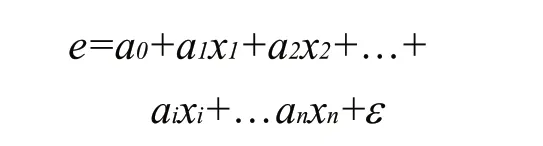
设对丝杠电机模块进行N次测量,将所测得的数据代入到式(1)中,即将代入,可得ej为:

式中:
ai为多元线性回归方程常数项;(i=0,1,2,…,n);
xj为N次样本测量的误差数据;(j=0,1,2,…,n);
ej为综合误差的拟合数学模型;
ε为均值误差;
通过对测量样本的数据值可以使用最小二乘法对ai(i=0,1,2,…,n)进行求解:

对函数求一阶偏导,并令一阶偏导等于0:
将上述方程进行整理:

将上述表达式通过矩阵方式进行表达求解:

根据矩阵的性质,当满秩时即可求得A中的方程常数项,即:

2 滑模控制的原理
对于目前的大多数步进电机控制系统来说,往往采用的是PID控制算法,PID控制算法对于电机有较好的控制效果,且随着PID算法的改进衍生出的模糊PID、遗传PID、B-P PID等控制算法都表现出了很好的控制效果,虽然名字不同但目的都是为了求得PID参数的最优解。
PID方法控制步进电机在复杂的工作状态下,仍会有一些不足,比如工作时时扰动突然的增加,当使用时间过长温度升高时,电机的固定参数发生变化,PID对于这种情况的出现并没有较好的效果。
滑模控制是中多非线性控制的一种,在动态的进程中,根据系统当前的状态(如偏差)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动,其系统的结构并不固定,因此又称变结构控制[7]。原理图如图3所示。其最主要的优点有两点:1)调节的参数少且响应速度较快;2)对运行过程中产生的扰动不灵敏,有较好的扰动抑制效果。

图4 滑模面原理图
2.1 基于趋近率的滑模控制器的设计
在滑模控制中的趋近率有很多种,比如等速、指数、幂次、一般趋近率等。不同的趋近率有不同的趋近速度,但是目的都是为了让状态量稳定在滑模面,过高的趋近率会有较好的响应时间,但状态量在滑模面附近会有较大的抖振现象产生[17],加速步进电机的损耗,影响定位精度,缩短步进电机的使用寿命;速度较慢的趋近率响应时间会降低,但对于抖振的现象会有明显的改善。
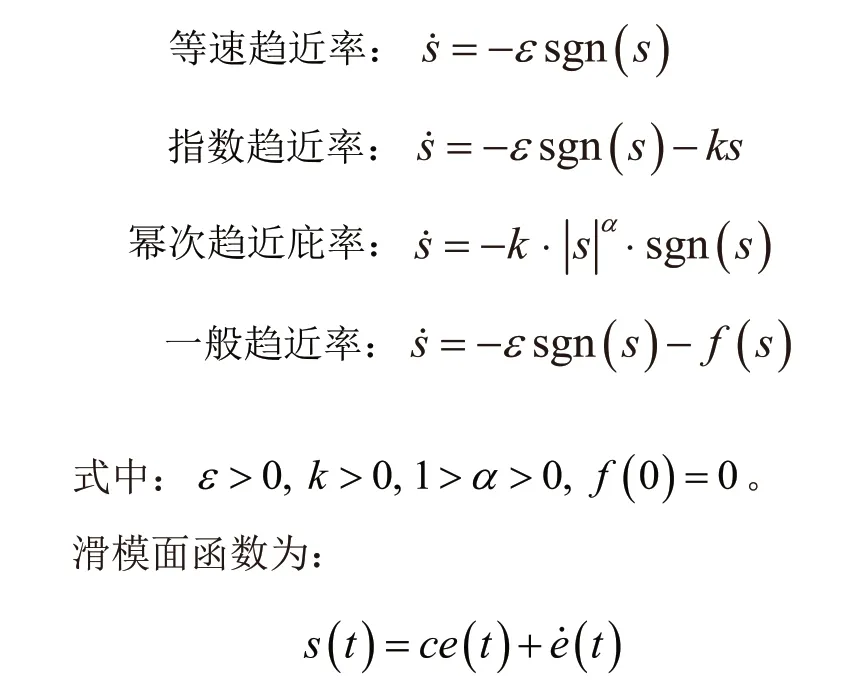
其中c>0,满足Hurwitz条件。
跟踪误差为:
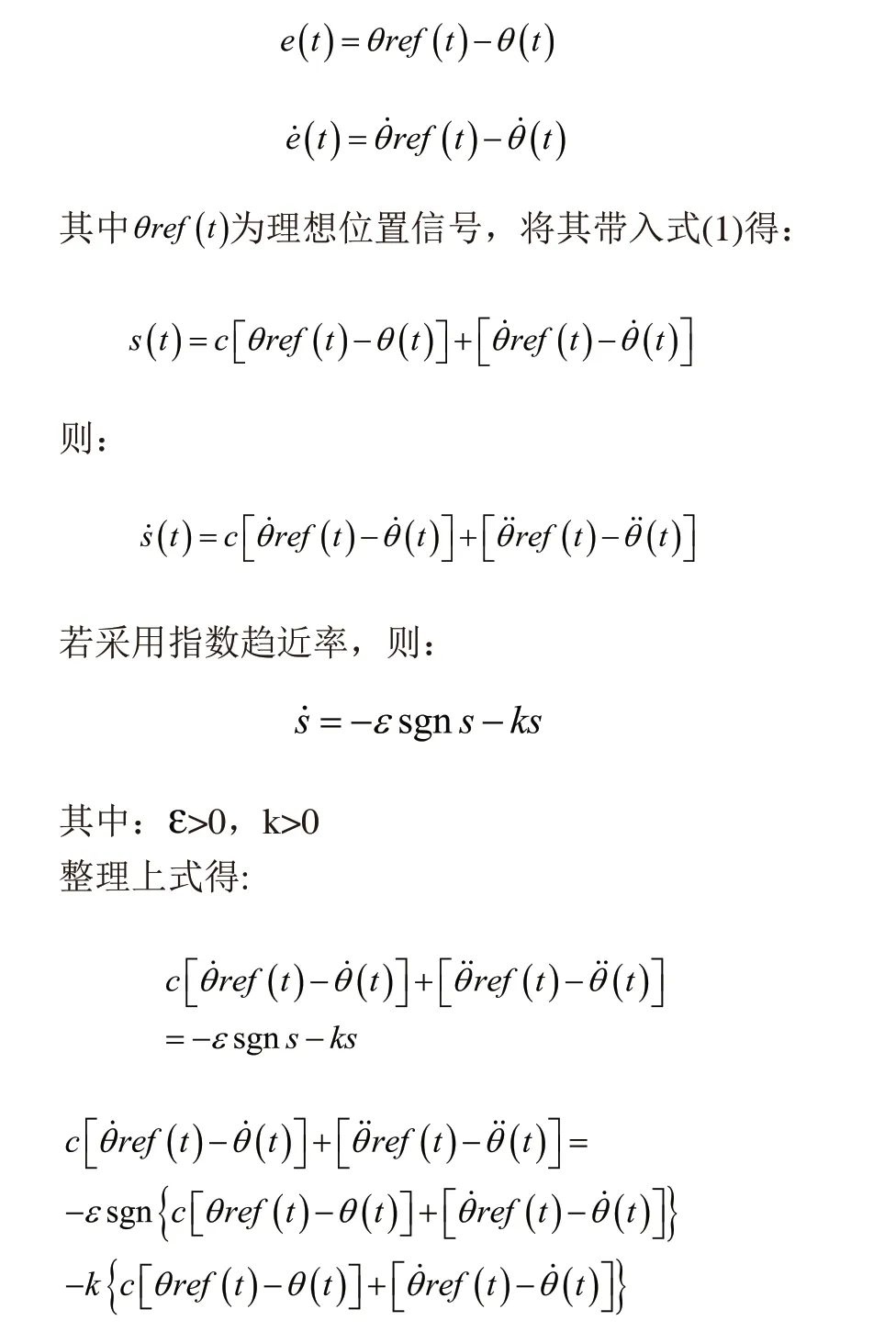
电机为被控对象,设跟踪误差为控制量,控制对象的二阶微分可作为微量干扰进行忽略不计,则:

ω(t)为控制器输入,则基于指数趋近率的滑膜控制器为:

2.2 仿真对比
利用Simulink对滑模指数趋近率进行仿真,输入信号为sin,验证指数趋近率滑模控制的位置跟踪效果,搭建的Simulink滑模控制器如图5所示。
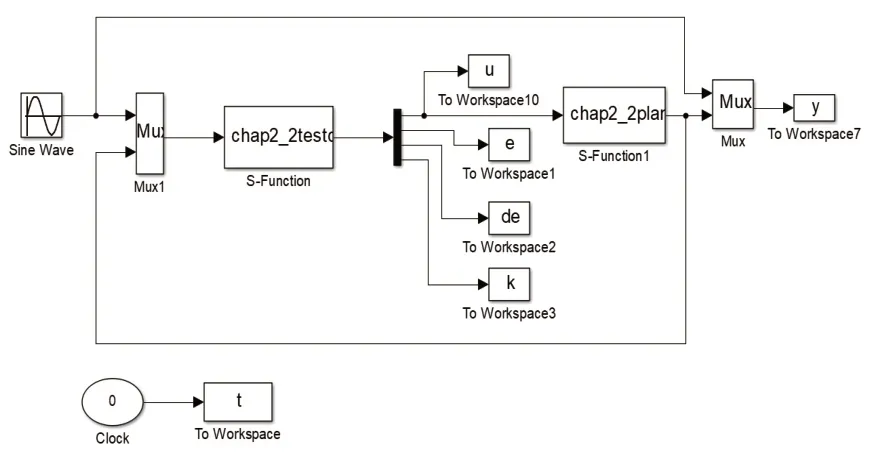
图5 指数趋近率Simulink结构图
仿真结果如图6所示。
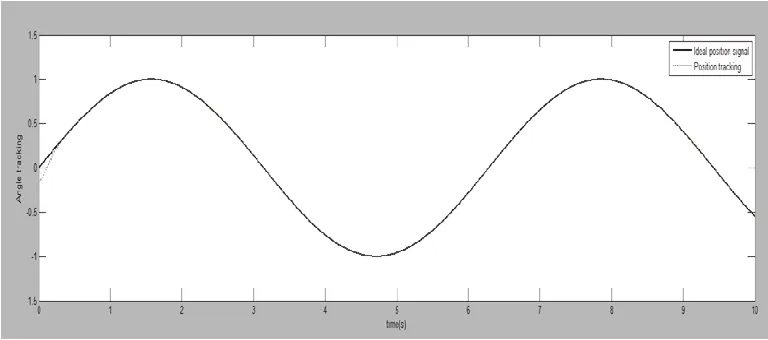
图6 指数趋近率位置跟踪
为产生对比,利用Simulink进行搭载传统PID的仿真,生成位置跟踪曲线,与滑模指数趋近率进行对比,说明方法之间的优劣性,同样输入sin信号,传统PID的仿真结构图如图7所示。
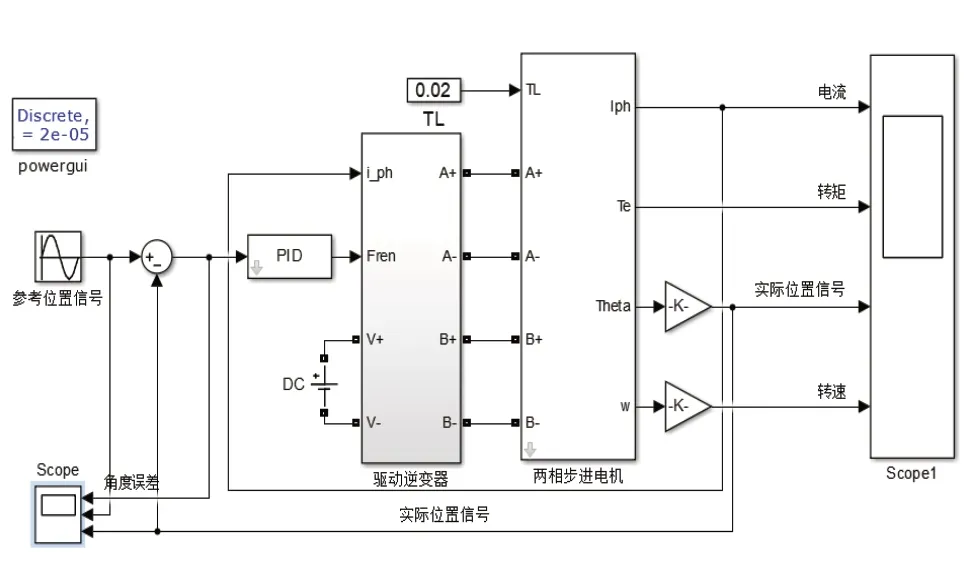
图7 传统PID的Simulink结构图
仿真结果如图8所示。
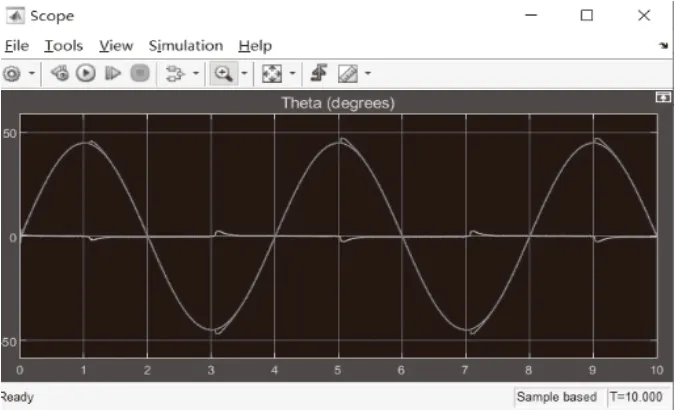
图8 传统PID位置跟踪曲线
通过图5与图7的对比可以得出基于指数趋近率的滑模控制效果比传统的PID效果要好,滑模指数趋近率控制在开始波动之后跟踪效果较好,后续误差很小,而传统的PID对位置跟踪每一阶段都会有一次波动,严重影响后续控制精度。
3 仿真模型的搭建与结果分析
3.1 仿真模型搭建
设按照第1节中的方法,利用激光干涉器对本结构步进丝杠结构进行有限次的测量得到的数据如表1所示。
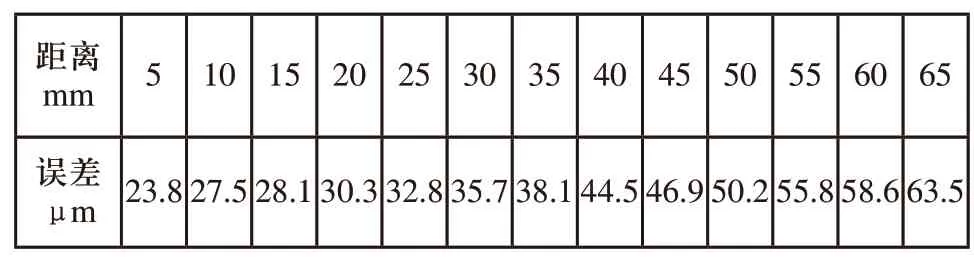
表1 Z轴部分测量定位误差
利用7次多项式进行拟合得到的误差数学模型如式所示:

利用MATLAB中的Simulink模块搭建搭建仿真模型,实现二项混合步进电机的速度位置双闭环,在输入时为了验证将在第2小节得到的静态误差滑模控制器,在输入端添加一定的静态误差进行验证。输入端如图9所示。
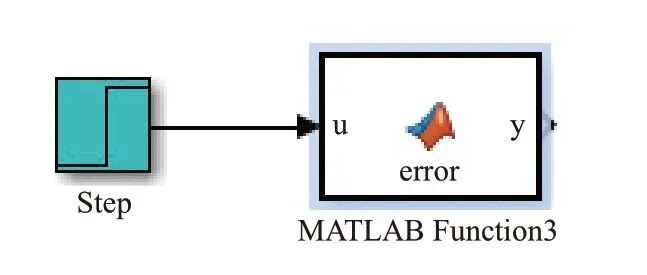
图9 静态补偿输入模块
本文步进电机为57系二相混合步进电机,其具体参数通过查阅相关手册可知,如表2所示。
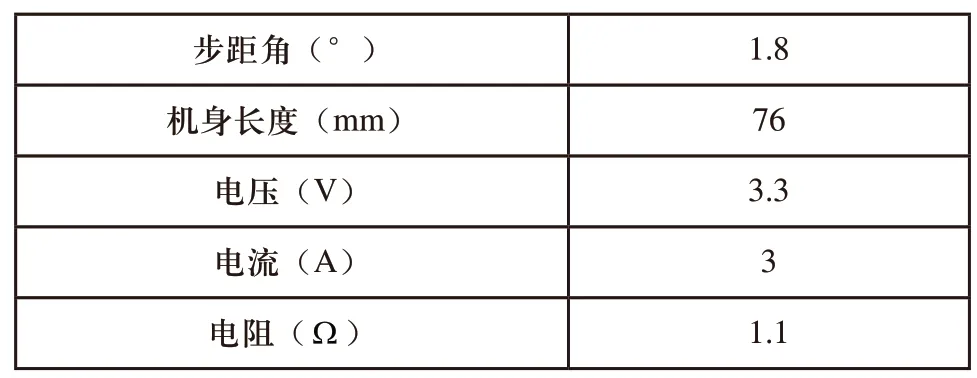
表2 57系步进电机的参数
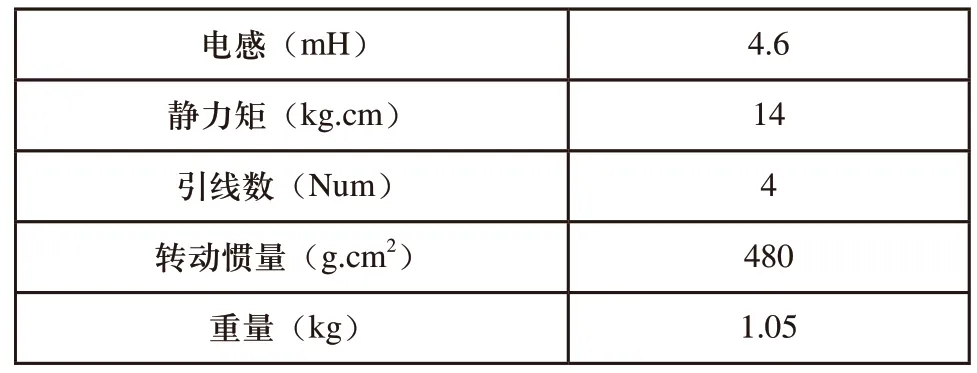
表2 (续)
二项混合步进电机的仿真模块由机械模块和电气模块组成,但是在Simulink的发展过程中,为了便于用户的仿真和观看,在现代的Simulink中提供了步进电机和驱动器的封装模块,如图10所示。
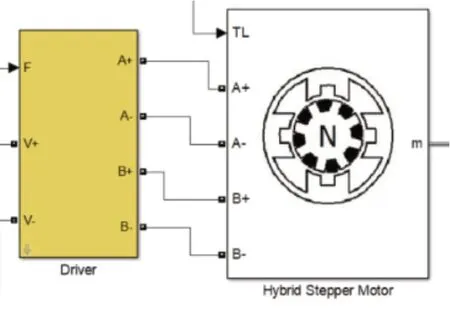
图10 二项混合电机和驱动模块
3.2 仿真结果分析
选用的KK6005C-200A1-F0滚珠丝杠模组通过查询手册,精度等级为P5,任意300mm行程内变动量为0.023mm。将其作为最大静态误差进行代入。为验证静态误差模型的补偿效果,有无静态误差模型各仿真一次,进行比较。
Simulink搭建如图11所示,输入步进电机的各项参数,设仿真时间为0.5秒,电机最终位置为30,所得到的位移和误差变化曲线如图12所示。仿真结果如图11所示。
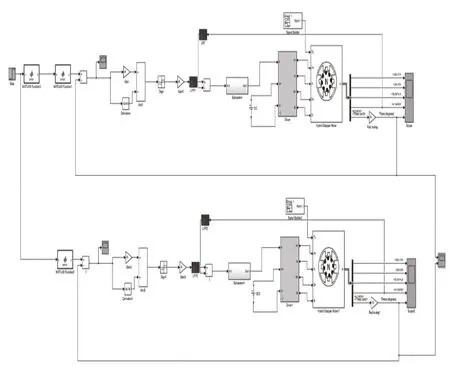
图11 仿真结构图
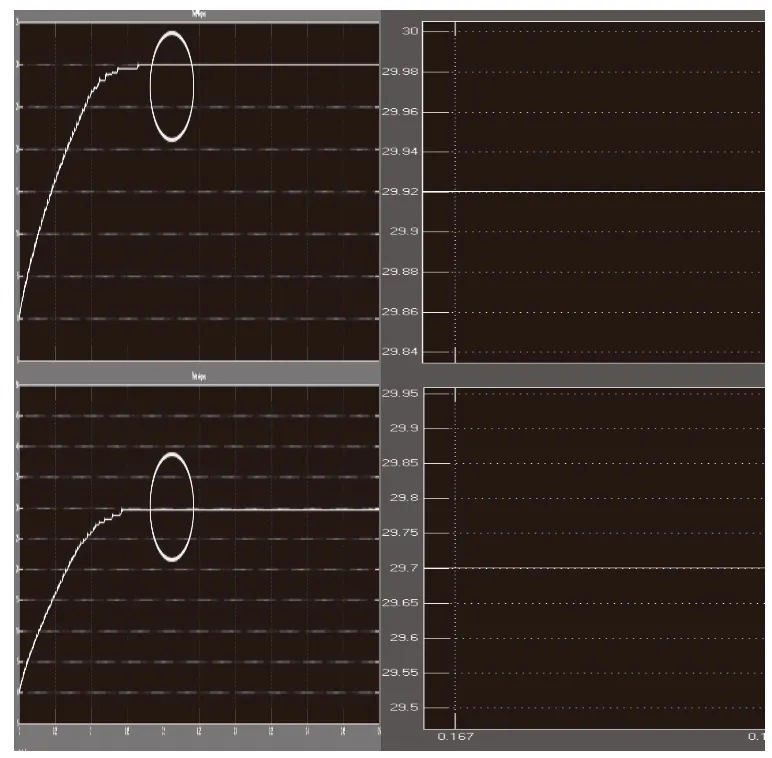
图12 位移变化曲线
从图12可以看出,在添加静态误差补偿之后,上方的曲线明显比下方无静态误差补偿的曲线更贴近最终位置,达到了提高定位精度的目的,同时也验证了该方法的可行性。
4 结语
本文通过对自主搭建的点激光位移传感器的电机丝杠运动结构产生静态误差的可能进行分析,经过有限次的测量进行静态误差的数学建模,在输入端进行补偿,已达到消除静态误差的目的,利用滑膜的特性去抵抗动态误差;用MATLAB搭建数学模型和利用Simulink的封装功能进行封装,将两者结合进行二项混合步进电机的仿真,同时对仿真的结果进行分析,去验证方法的正确性,和理论的可行性,对后人进行激光测量平台的搭建中二项混合步进电机的控制或静态误差补偿的研究具有一定的借鉴意义。
