基于Wi-Fi无线通信技术的工程车视频控制系统研究
2021-01-12叶永兴
叶永兴,代 盼
(湖州师范学院 信息工程学院,浙江 湖州 313000)
工程施工作业中,工程车基本上是由驾驶员坐在车辆驾驶室内对车辆进行操控作业的,虽然驾驶员对车辆有着良好的控制能力,但当车辆发生较大的安全事故时,如车辆跌落、山体滑坡、建筑物倒塌等,驾驶员基本无法逃生[1-2].随着移动通信、物联网、传感器、嵌入式系统和数字图像处理技术的快速发展,远程监控和远程作业成为可能[3-5],使用物联网无线传输技术就可以远程遥控工程设备进行施工作业[6-8],操作人员不必进入现场环境作业,可杜绝施工现场各种安全隐患的威胁.
本文设计一套基于Wi-Fi无线通信技术的工程车视频控制系统.该系统主要包括车辆端和电脑控制端两个部分,通过车载摄像头、温度传感器、速度传感器和GPS定位传感器,驾驶员可清楚地了解车辆当前所处环境的状态,使驾驶员即使不在车上也可以有身临其境的驾驶感觉[9-10].该系统能实现驾驶员与驾驶车辆的空间分离,能有效避免工程事故对驾驶员造成的伤害.该系统对工程车无线视频控制系统的发展有着重大的意义.
1 系统结构
为给驾驶员营造一个安全舒适的驾驶环境,本文设计一套人车分离的控制系统.该系统以Wi-Fi无线通信为基础,驾驶员仅需一台电脑和一个摇杆设备就能远程控制车辆.由于需要采集和传输大容量的视频信息,且对传输的实时性要求较高,本项目使用Wi-Fi无线通信技术将电脑控制端与车辆端连接,以传输视频信号和控制信号[11-12].该系统结构见图1.
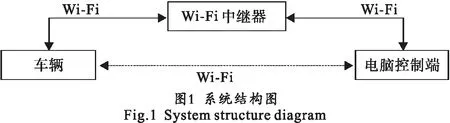
车辆通过Wi-Fi直接连接电脑,当传输距离较远时可通过Wi-Fi中继器增大信号传输距离.其工作流程为:通过Wi-Fi连接使车辆端和电脑控制端处于同一局域网下;使用UDP协议传输数据内容实现车辆端与电脑控制端的数据互通;由车辆控制端的主控单片机采集图像、温度等信息,并将信息传输至电脑;电脑控制端利用数据可视化显示各传感器信息,并将采集的摇杆设备信息传输至车辆控制端,实现远程控制车辆的需求[13].
2 硬件设计
由于车辆端主控芯片需要驱动的传感器数量较多,也需要较高的处理速度和采集、发送大容量的图像数据,因此本系统车辆端采用STM32 F407 ZGT6单片机作为主控芯片,以及集成人机交互模块、数据采集模块、动力输出控制模块和无线通信模块.STM32 F407 ZGT6单片机主控芯片具有144引脚、 192 KB SRAM、1024 KB FLASH、112个通用IO口,时钟频率高达168 MHz,还具有1个DCMI摄像头接口、1个FSMC接口、3个SPI接口、6个串口、3个ADC接口和14个定时器,且价格低廉,非常适合本项目的开展.本项目将车辆端硬件分为4个主要部分:数据显示、动力输出控制、数据采集、无线通信.硬件组成如图2所示,实物如图3所示.各部分功能描述如下:

2.1 数据显示
使用1块2.8英寸的TFT彩色显示屏,以显示车辆各传感器的数据,这样即使没有连接电脑控制端也能查看各传感器的运行状态.同时输入车辆Wi-Fi模块的配置信息,以方便车辆与电脑控制端的连接.
2.2 动力输出控制
本系统需要控制1个4自由度的机械臂、1个自由度的摄像头舵机、2台驱动小车移动的电动机.所需的控制信号由主控芯片产生7路PWM实现各个部分的控制.为将机械爪始终保持在摄像头的视野范围内,控制机械爪舵机的PWM参数要与摄像头舵机的PWM参数相同,这样才能使两者同步运动.
2.3 数据采集模块
数据采集包括如下5个模块:
(1) U-BLOXGPS定位.该模块可以自主采集GPS卫星信号,并通过串口输出到单片机.
(2) 红外轮盘测速.使用2个红外对管和测速轮盘测量2个车轮的行进速度,轮盘安装在车辆两侧的轮子上,当车辆行进时带动轮盘旋转,轮盘上的格子会阻挡或通过红外对管的信号,且每次阻挡或通过红外对管的信号都会产生一个电平翻转信号,主控芯片通过计算1 s内电平翻转次数就可计算出车轮的转动速度.
(3) DS18B20温度检测.芯片使用单总线与单片机通信,对小车的驱动电路和环境进行温度检测,以提示驾驶者车辆所处环境的温度,避免高温损坏车辆.
(4) 电量检测模块.车辆端由1块8.4 V锂电池为车辆提供电源,电量检测模块利用锂电池电压与剩余电量存在的关系(表1)进行电量检测.电压检测模块采用一个精密电阻对电源电压分压,主控芯片采用ADC 检测和计算锂电池当前的电压,并判断该电压所在的区间,就可得知电池的剩余电量.

表1 电压与电量对照表Tab.1 Voltage and electricity comparison table
(5) OV2640摄像头.该模块体积小,驱动电压低,可以直接输出JPEG图像.该格式的图像容量相对较小,有利于本项目的开展.
无线通信.使用ESP8266EX芯片,该芯片集成了TCP/IP协议栈和Wi-Fi协议栈,使用时只需配置该芯片需要连接的Wi-Fi热点、通信协议(本项目使用UDP协议)、IP地址和端口即可.当收到主控单片机发来的数据时,该芯片会自动将数据通过配置好的通信协议组装成数据发送到指定的IP地址和端口.主控芯片使用SPI与其通信,其最高速率可达 1 Mbps以上,适合图像和控制信号的高速传输需求.
3 软件设计
3.1 车辆端软件
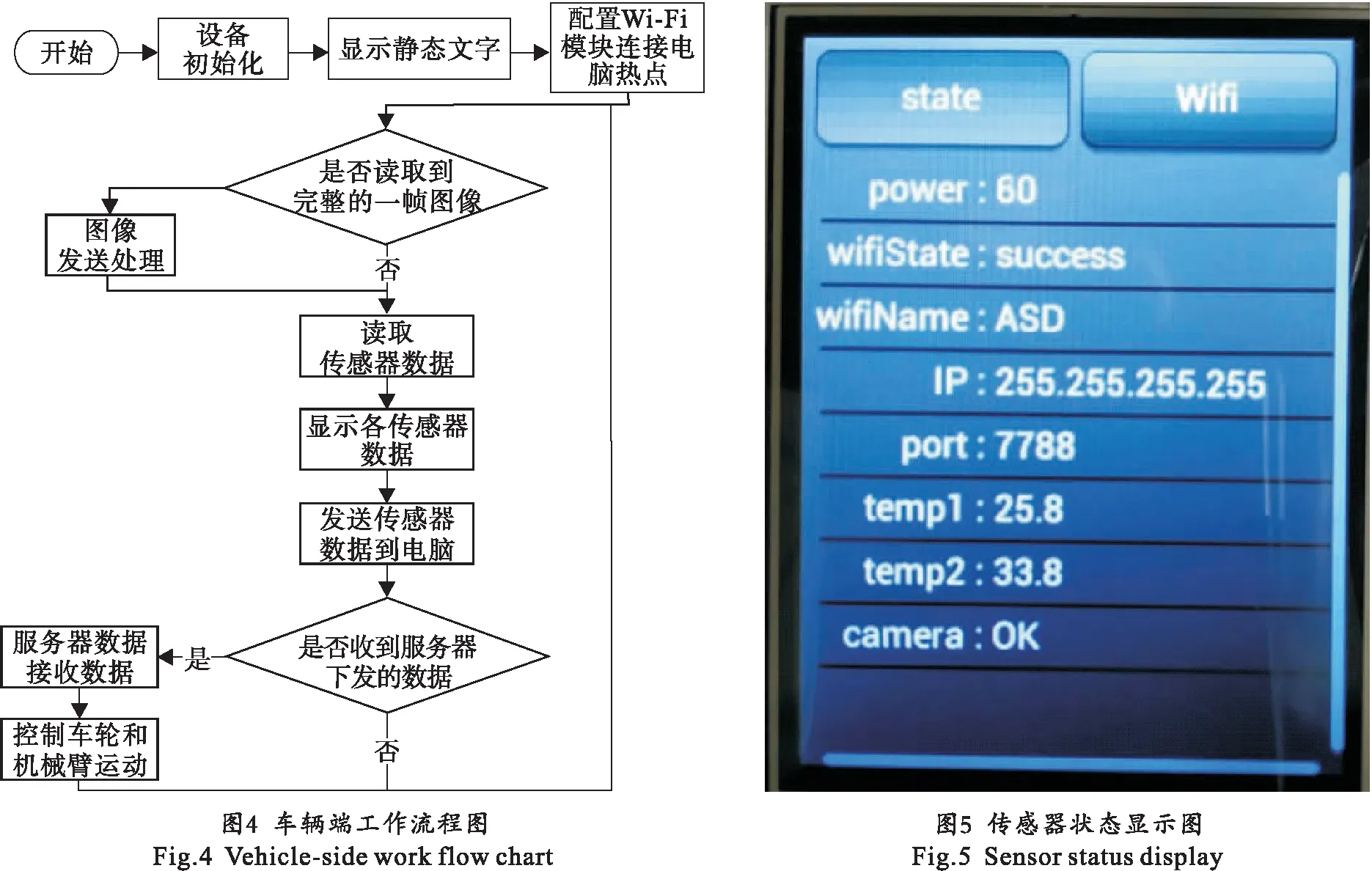
车辆端工作流程如图4所示.系统上电后进行设备初始化,其中包括驱动外部传感器所需要的串口中断、外部中断、定时器中断、IO口初始化,以及启动各个传感器使其正常工作.随后配置显示屏显示各传感器名称的静态文字(图5),以及配置Wi-Fi模块连接电脑热点.接着循环读取摄像头和各传感器数据,并显示到屏幕上和发送到电脑端,其中当读取到摄像头数据后进行数据开始标志和数据结束标志的添加,以方便电脑端解析.其他的传感器数据用“,”符间隔,并单独组装成一个数据块发送到电脑端,然后读取电脑端下发的数据,以控制车轮和机械臂的移动.为保证机械臂的机械爪始终在摄像头的视野范围内,控制机械爪的舵机要与摄像头舵机的PWM控制信号参数相同,这样才能保证其同步运动.
3.2 电脑端软件
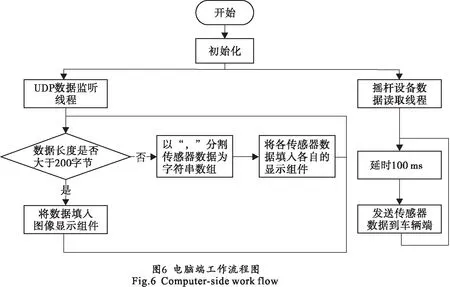
电脑端的上位机软件采用Electron框架编写,该框架集成了Chromium 和 Node.js,工作流程如图6所示.软件启动后进行初始化,其中包括用于数据可视化显示的各显示组件和UDP通信的配置.分别建立UDP数据监听线程和摇杆设备数据读取线程.在UDP数据监听线程中循环读取由车辆端上传的数据,以数据字节长度区分是图像数据还是其他传感器数据.若数据长度大于200字节可判断为图像数据,并将其填入图像显示组件,通过不断刷新图像组件的显示内容来达到显示视频的目的.若数据小于200字节可判断为其他传感器数据,采用“,”符拆分出各个传感器数据,并填入各自对应的数据可视化组件中,完成电脑端显示各传感器的需求.摇杆设备数据读取线程每间隔100 ms读取一次,并将其发送至车辆端,以控制车轮和车载机械臂的运动.
电脑端各显示组件如图7所示,摇杆手柄实物如图8所示.电脑端UI界面设计能直观地展示小车传感器和摄像头的各项数据,利用数据可视化技术将各项参数以图表的形式显示在屏幕上.UI界面效果包括如下几项:
(1) 2个温度传感器数据,在同一个折线图中分别显示两条温度曲线.
(2) 电池电压数据,方便查看电压走向,保障小车供电正常.
(3) 当前时间.
(4) 摄像头传输过来的实时画面.
(5) 3个仪表盘:电动机的转速;当前小车的行进速度;当前电池的剩余电量.
(6) 地图模块,将小车的实时位置标注在地图上,利用鼠标移动和缩放调整最佳显示模式.
(7) 测速盘信息可以观察速度的变化趋势.

4 结 论
利用Wi-Fi无线视频传输技术,设计一款工程车无线视频控制系统.区别于传统的工程车控制系统,该系统不仅可实现操作人员远距离控制车辆,可获得与传统控制系统几乎相同的操作体验,且操作人员不必再进入危险的施工现场,最大限度地保障了施工人员的生命安全.
