基于LabVIEW的种子分选控制系统设计
2021-01-12费正盼贾良权唐琦哲祁亨年
费正盼,贾良权,刘 杰,高 璐,唐琦哲,祁亨年
(湖州师范学院 信息工程学院 浙江省现代农业资源智慧管理与应用研究重点实验室,浙江 湖州 313000)
种子分选是为了剔除不良种子、异物等,以提高种子的精度级别和利用率,进而提高种子的纯度、发芽率和活力,在农业生产中具有重要意义[1].广泛应用的种子分选方法主要有风力分选、重力分选和光电分选等.目前国内种子分选装备仍以机械调节为主,计算机、传感、变频等先进技术应用较少,且自动化程度较低、能耗高、噪音大,产品的性能和精选质量与国外智能化装备相比差距较大[2].机电控制系统是种子分选设备的核心模块之一.可编程逻辑控制器(PLC)因其技术成熟规范、可靠性高、抗干扰能力强、组合灵活、编程简单、维修方便等优点[3-4],在种子分选设备中得到广泛应用.潘雪峰[5]基于光学无损检测的蔬菜种子分选系统,以PLC控制器为核心设计了基于VS2010和OpenCV的种子分选软件平台,分选成功率平均在91%以上;蔡卫国[6]以PLC为核心控制器,设计了一款种子精选分级机构,将种子按其质量级别信息通过吹嘴吹入相应容器中,完成种子质量分选,当传送带速度为0.2 m/s、气压为0.8 MPa时,种子分级合格率可达90%以上.上述种子分选设备的控制系统主要由PLC组成,通过驱动电磁阀、步进电机或机械臂等执行元件完成相应的分选动作,上位机软件采用C/C++、C#等高级语言编写.控制系统开发过程涉及较多的通信、软硬件协议,人机交互界面设计复杂,整个开发过程工作量较大、周期较长[7-9].
为使开发过程更简洁、更灵活,本文利用LabVIEW软件优秀的可视化能力和丰富的集成工具库,设计人机交互界面与种子分选控制系统,通过硬件电路和驱动程序驱动步进电机完成种子分选,以达到自动化、精准化的种子分选效果.
1 系统与硬件设计
1.1 系统设计
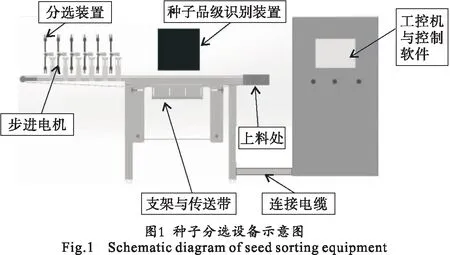
本文设计的种子分选系统的基本工作流程为:种子放入设备后,由种子品级识别装置(高光谱相机)采集种子光谱信息传输给工控机,工控机上位机软件基于采集的光谱信息利用种子品级识别算法计算并输出对应的种子品级信息,种子进入分选区后,控制系统根据其品级信息驱动对应步进电机转动90°,带动电机上4个互成90°角的分选挡板将种子推入相应的品级槽中.种子分选设备示意图如图1所示.
该种子分选系统由机械部分、硬件电路、软件部分组成.设备组成结构如图2所示.

系统的控制程序工作流程为:①由算法识别并输出种子的品级信息;②根据种子和分选电机的位置计算种子到达分选电机的时间,此时计算机向LabVIEW控制程序发出指令;③LabVIEW根据指令驱动对应电机的子VI,子VI通过DAQ模块向PCI板卡发出数字脉冲,驱动相应电机转动一定角度,将种子推入品级分选槽,之后循环扫描是否接收到分选算法发出的电机驱动信号;④重复上述步骤,直到种子分选完成.种子分选系统控制程序流程如图3所示.

1.2 硬件设计
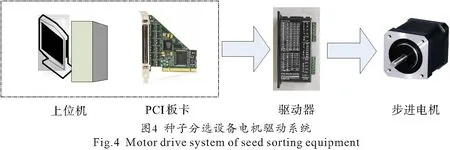
本文设计的基于LabVIEW的种子分选设备硬件部分主要由上位机、PCI板卡、步进电机驱动器、步进电机构成.上位机的LabVIEW程序通过其内部的DAQ模块驱动PCI板卡产生所需的数字脉冲,并将其输出到步进电机驱动器,驱动步进电机完成相应动作.种子分选设备电机驱动系统如图4所示.
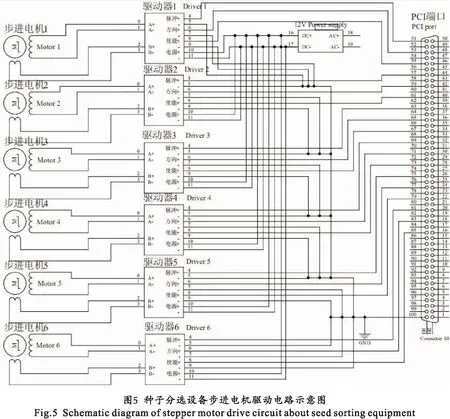
考虑到驱动程序的开发和调试过程要求设备与LabVIEW应具有较好的兼容性,本文选用型号为NI PCI-6509的96位高驱动数字输入/输出(DIO)设备作为数字脉冲的发生设备,上位机通过PCI接口与其进行数据通信.NI PCI-6509是美国国家仪器公司开发的一款数字输入输出设备,它具有96条TTL/CMOS兼容的数字I/O线、24mA高驱动输出、数字滤波等功能,其丰富的数字I/O输入输出端口满足了工程中同时控制多台步进电机运动的需求.同时其与LabVIEW软件具有较好的兼容性,利于驱动程序的开发和调试.根据步进电机和步进电机驱动器的型号设计相应的步进电机驱动电路,如图5所示.每个电机的两相绕组分别连接至对应驱动器的A+、A-和B+、B-端口.驱动器的其他4个端口分别为脉冲、方向、使能和电源端口,电源端口连接至12 V直流电压源,脉冲、方向、使能端口的正端与对应的PCI板卡输出端口相连接,负端统一连接至公共端口.
2 软件设计
2.1 前面板
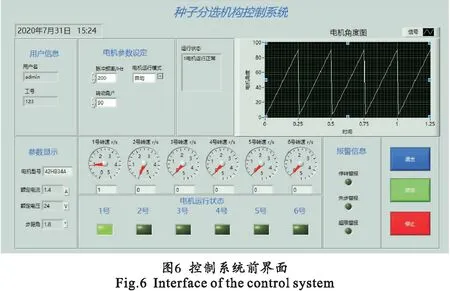
前面板是人机交互的关键部分,主要由参数显示、电机运行状态监控和电机参数设置3部分组成.其中,参数显示模块主要用于显示用户和电机的各项参数信息;电机运行状态监控模块主要用于电机监测电机组的运行状态和异常信息;电机参数设置模块主要用于设置脉冲频率、转动角度、电机运行模式等参数.参数设置模块中脉冲频率的可调范围为0~500 Hz,电机转动角度的可调范围为0°~360°,电机运行模式分为自动运行和单步运行两种模式.控制系统前界面如图6所示.
2.2 脉冲发生
采用LabVIEW软件对步进电机进行控制,脉冲的产生是其关键.本文利用LabVIEW内部的DAQ模块控制PCI板卡输出脉冲波形.DAQ是NI公司的一套与LabVIEW兼容的数据采集驱动,集成了丰富的应用程序编程接口(API)和VI函数等开发工具[10].脉冲产生的具体实现过程为:首先对DAQ模块进行相应的配置,该系统选用的NI板卡与LabVIEW有较好的兼容性,配置时选择数字信号输出,然后选择相应端口号即可.通过DAQ模块控制PCI板卡输出高低电平,在高低电平间来回切换就可以产生数字脉冲.利用for循环和延时可以精确地控制脉冲数和脉冲频率.一般来说,脉冲频率可由下式给出:
(1)
式中:f为脉冲频率;T为脉冲周期.在LabVIEW程序中调整脉冲周期即可控制输出脉冲的频率.步进电机旋转一周所需的脉冲数可由下式给出:
(2)
式中:x为电机旋转一周所需的脉冲数;α为步进电机的步距角.本文选用的步进电机其步距角α为1.8°,将其带入求得x为200个脉冲每转.进而电机的转速可由下式给出:
(3)
式中:n为步进电机的转速;f为脉冲频率;x为电机旋转一周所需的脉冲数.电机正常运行时,点亮对应的电机运行指示灯,当脉冲发生循环结束时,电机停止运转并熄灭指示灯.
2.3 多电机并行控制
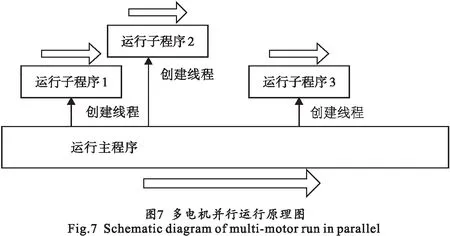
种子分选设备需要使用多个步进电机,对多个步进电机同时进行控制能使系统更高效.不同电机的驱动程序重复度较高,而采用子VI的设计可以较好地降低程序的重复度,只要在需要驱动电机时,调用相应的电机驱动子VI即可.在LabVIEW中,子VI一般只能串行运行,效率相对较低.为使在运行某个电机驱动子VI时其他电机驱动子VI也能同时响应,利用LabVIEW软件的子VI并行运行功能,将电机驱动子VI的wait until done控制端口选项设置为false,即可同时调用多个步进电机驱动程序.多电机并行运行原理如图7所示.
2.4 旋转角度控制
在LabVIEW程序中,利用for循环可以精确地控制产生的数字脉冲数.本文选用的步进电机其步距角α为1.8°,旋转角度θ与旋转该角度所需的数字脉冲数x的关系可由下式给出:
(4)
在前面板中输入旋转角度,通过式(4)即可计算出旋转任意角度所需的数字脉冲数,将求得的x连接到for循环的循环次数控制端口,即可实现控制步进电机旋转指定角度.
3 实验与分析
根据工程实际情况,该控制系统对步进电机的转矩需求小于0.8 N·m,因此通常选用基座号为28、42等型号的小型步进电机.同时步距角为1.8°的2相步进电机已经能满足系统控制精度要求.为测试该系统在不同电机保持转矩条件下的运行情况,从符合参数要求的步进电机中选用两款常用的2相4线制步进电机,其型号分别为DQ-28HB30A,保持转矩为0.07 N·m,以及型号为DQ-42HB34A,保持转矩为0.31 N·m,驱动器型号为DM420.在该程序下 NI PCI-6509最高能够产生频率为500 Hz的数字脉冲信号.通过改变脉冲频率、驱动器细分数(细分数表示步进电机旋转一周所需要的脉冲数)、旋转角,让电机在不同参数下分别进行50次试验,观察并记录电机的运行状态.
调整脉冲频率在100~500 Hz范围内变化,并对电机进行测试,发现DQ-42HB34A型号电机在各频率下都能稳定运行.DQ-28HB30A型号电机在频率为100 Hz时会出现偶尔的失步现象;增加驱动脉冲频率至200 Hz时,电机会出现严重的失步;至400 Hz时电机无法正常运行.实验结果表明,脉冲频率和电机保持转矩对电机能否稳定运行有重要影响.随着脉冲频率升高电机转速增加,输出转矩相应降低,电机稳定性下降.实验结果如表1所示.

表1 脉冲频率变化与驱动效果Tab.1 Influence of pulse frequency variation on driving effect
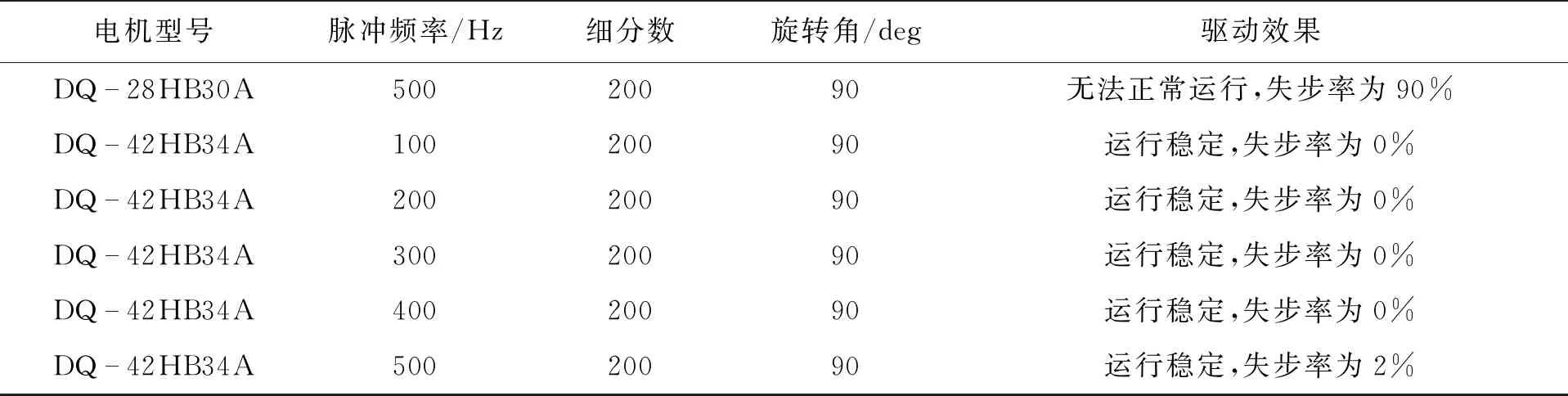
表1(续)
调整细分数在200~1 600范围内变化,并对电机进行测试,发现细分数较低时,DQ-28HB30A型步进电机偶有失步现象,DQ-42HB34A型步进电机运转正常;细分数增大时,DQ-28HB30A型步进电机运行稳定性有轻微波动,DQ-42HB34A型步进电机运行稳定性无明显变化.由表2可知,在不同驱动器细分数条件下,DQ-42HB34A型步进电机运行的稳定性表现更优.
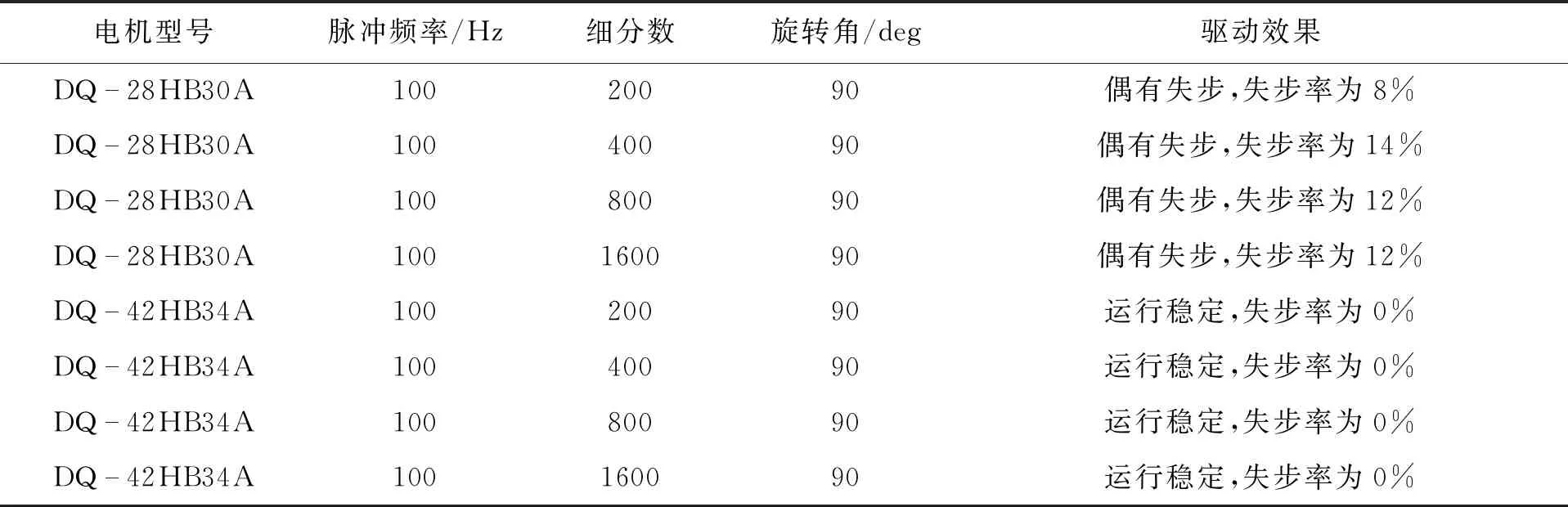
表2 细分数变化与驱动效果Tab.2 Influence of subdivision variation on driving effect
调整旋转角度在45°~180°范围内变化,并对电机进行测试,发现在不同旋转角度下,DQ-28HB30A型步进电机运行偶有失步现象,电机失步率随旋转角度变化有轻微波动;DQ-42HB34A型电机在不同旋转角度下运转正常.由表3可知,在不同旋转角度下,DQ-42HB34A型步进电机运行的稳定性表现更优.
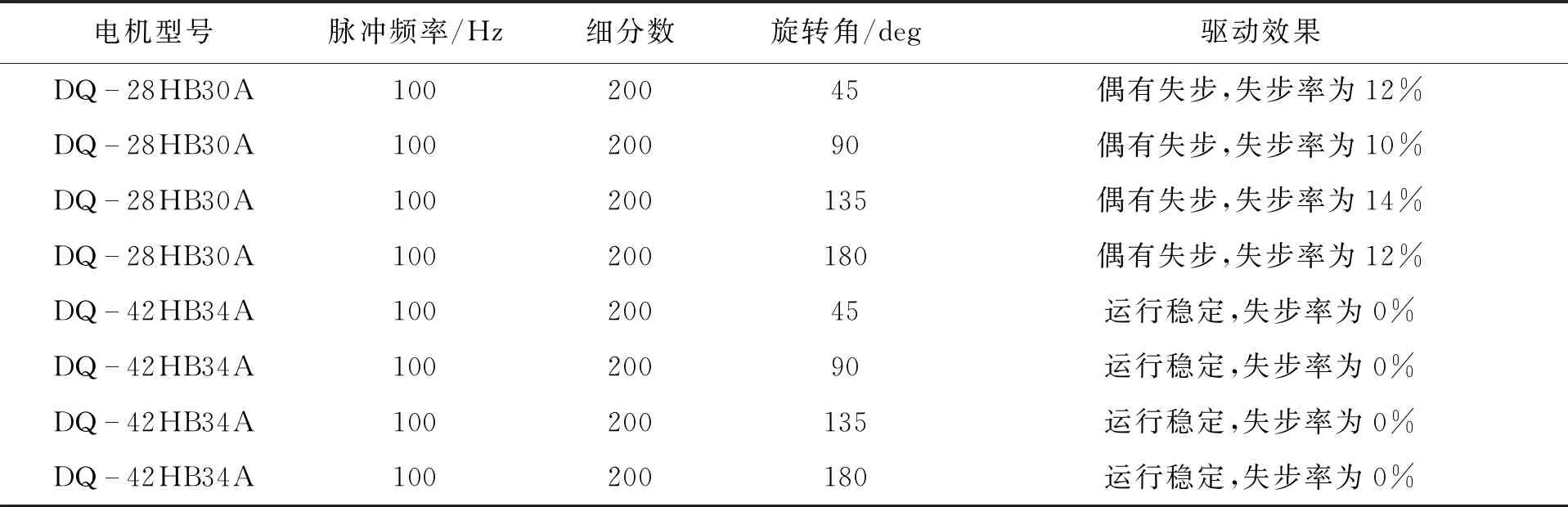
表3 旋转角变化与驱动效果Tab.3 Influence of rotation angle variation on driving effect
综上实验结果表明,脉冲频率、驱动器细分数和旋转角度对电机运行均有一定影响.在该控制系统下,型号为DQ-42HB34A的步进电机在不同频率、不同驱动器细分数、不同旋转角度参数下均能取得不错的驱动效果.型号为DQ-28HB30A的步进电机在不同频率、不同驱动器细分数、不同旋转角度参数下驱动效果均不及DQ-42HB34A型步进电机.因此,型号为DQ-42HB34A的步进电机更适用于本种子分选控制系统.在脉冲频率为500 Hz、细分数为200、旋转角度为90°时,采用DQ-42HB34A型步进电机的控制系统其失步率为2%.在设备其他部分运行效率理想的情况下,该参数下理论上单个电机每秒最高可分选10粒种子,本控制系统由6台电机组成,计算可知该控制系统种子分选效率理论最高值为3 600粒/分,漏选约72粒.分选受限于种子品级识别速度及其他因素,实际分选效率将有所变化.经过多次调试,该控制系统功能正常,理论上能够达到种子分选设备对控制系统的要求.
4 结 论
本文基于图形化编程语言LabVIEW,利用PCI控制板卡和步进电机设计了一款种子分选控制系统.该系统采用成熟的商用软件和硬件,设计和调试高效便捷,交互界面简洁清晰,易于用户二次开发,能有效减少开发工作量,缩短开发时间.实验结果表明,随着脉冲频率升高,DQ-28HB30A型和DQ-42HB34A型电机运行稳定性均有所下降;随着驱动器细分数升高,DQ-28HB30A型电机运行稳定性有轻微波动,DQ-42HB34A型电机运行稳定性无明显变化;随旋转角度增大,DQ-28HB30A型电机运行稳定性有轻微波动,DQ-42HB34A型电机运行稳定性无明显变化.理想工况下,在控制脉冲频率为500 Hz、细分数为200、旋转角度为90°时,使用DQ-42HB34A型步进电机,其系统失步率在2%以下,理论分选效率最高为3 600粒/分,分选漏选约72粒,验证了采用LabVIEW在种子分选设备中应用的可行性,为进一步深入研究提供了参考.