铁道车辆柔性转向架蛇行频率分析方法
2021-01-11干锋戴焕云罗光兵杨震寰
干锋,戴焕云,罗光兵,杨震寰
(西南交通大学 牵引动力国家重点实验室,四川 成都 610031)*
铁道车辆在轨道上运行,依靠一定形状的车轮踏面和轨道型面相互配合来完成直线行走和曲线通过等运动,如图1所示.自由轮对在轨道上运行,由于踏面是具有一定锥度的锥形,会产生一种特有的自激振动(轮对横向移动同时绕其中心垂向转动),这种运动称为轮对蛇行运动.
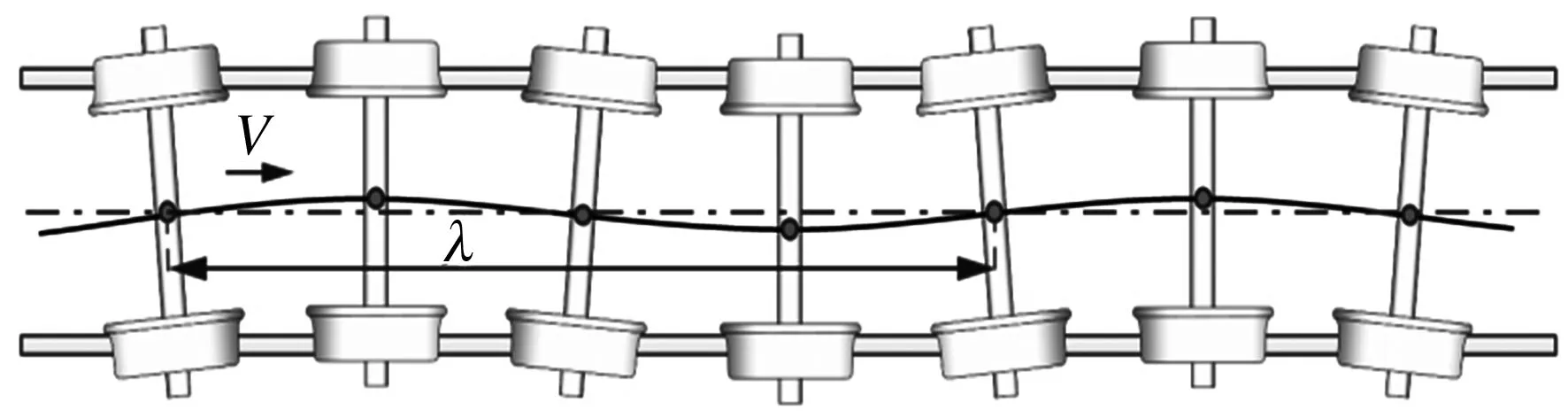
图1 轮对蛇行运动及波长
蛇行运动作为铁道车辆的特有现象,其运动稳定性直接关乎车辆运行品质,近年来,我国的高速铁路运营里程迅速增加,高速动车组运行过程中出现的蛇行失稳问题日益凸显.大量学者对高速动车组的蛇行失稳现象展开研究.Polach[1]指出等效锥度曲线的非线性会对车辆的临界速度和分叉类型产生影响,提出了一种用来评估轮轨关系的非线性参数.我国动车组在运营中出现的二次蛇行失稳现象与等效锥度的非线性密切相关,研究表明[2-5],当等效锥度偏大且出现负斜率非线性特性时,动车组容易出现频率一般为7~9Hz的二次蛇行失稳现象,该蛇行运动模态易与车体一阶菱形模态耦合,出现严重恶化车辆运行平稳性和舒适度的“抖车”现象.这种现象可通过车轮镟修、钢轨打磨和提升车体一阶菱形模态频率加以解决.何旭升等[6]通过动车组振动测试指出轮轨等效锥度偏小时,动车组容易出现主频为1.5Hz的一次蛇行运动.池茂儒等[7]指出我国高速铁路存在钢轨打磨偏差,轨肩欠打磨时容易导致等效锥度变大,造成车辆二次蛇行失稳;轨肩过打磨易导致等效锥度偏小,容易造成车辆一次蛇行失稳.
由以上研究成果可知,高速动车组的蛇行运动频率与波长等参数对动车组的运行品质有很大影响,为车辆系统动力学的研究重点.1885年,德国学者Klingel[8]推导了计算自由轮对蛇行运动频率和波长的Klingel公式,EN15302[9]和UIC519[10]标准计算等效锥度的过程中均使用了该公式.但实际运行的动车组转向架均为具有一系悬挂的柔性转向架,其蛇行运动频率与波长介于自由轮对和刚性转向架之间,需要通过理论推导或仿真计算来确定其蛇行运动波长与频率.日本学者ShiroKoyanagi[11-12]于1991年提出了柔性转向架蛇行运动波长的简化计算方法并通过实测数据得到了验证,但该蛇行运动方程将车轮简化为锥形踏面,未考虑实际车轮踏面的强非线性,不能反映不同轮对横移量下轮对蛇行频率的变化,因此该公式不能直接应用于实际轮对和构架蛇行波长计算过程中.而蛇行运动对铁道车辆稳定性和平稳性具有显著影响,故有必要提出新的柔性转向架蛇行运动公式,以研究车辆在实际车轮踏面锥度下及不同轮对横移量下的轮对蛇行运动规律.
本文推导了自由轮对纵向、横向和摇头运动的三个一阶微分方程,并将该方程作为蛇行运动的激励代入考虑一系悬挂的柔性转向架二阶微分方程中.该二阶微分方程考虑了转向架的纵向、横向和摇头运动,结合蛇行运动特征,计算不同轮对横移量下的构架蛇行频率.并将计算结果与国内某型时速350 km动车组的实测构架加速度频谱进行比较,从而验证该方程的准确性和有效性.
1 自由轮对蛇行运动
1.1 自由轮对蛇行运动方程推导
结合图1中的蛇行运动过程,以下从两方面进行分析:
(1)轮对有横移无摇头时
当轮对有横移无摇头,即y≠0,θ=0°时,左轮接触半径为Rl,右轮为Rr,左轮接触点距轮对中心距离为Ll,右轮为Lr(见图2(a)).此时车轮以w的角速度向前滚动时,左轮接触点的滚动速度为vl,右轮为vr.
(1)
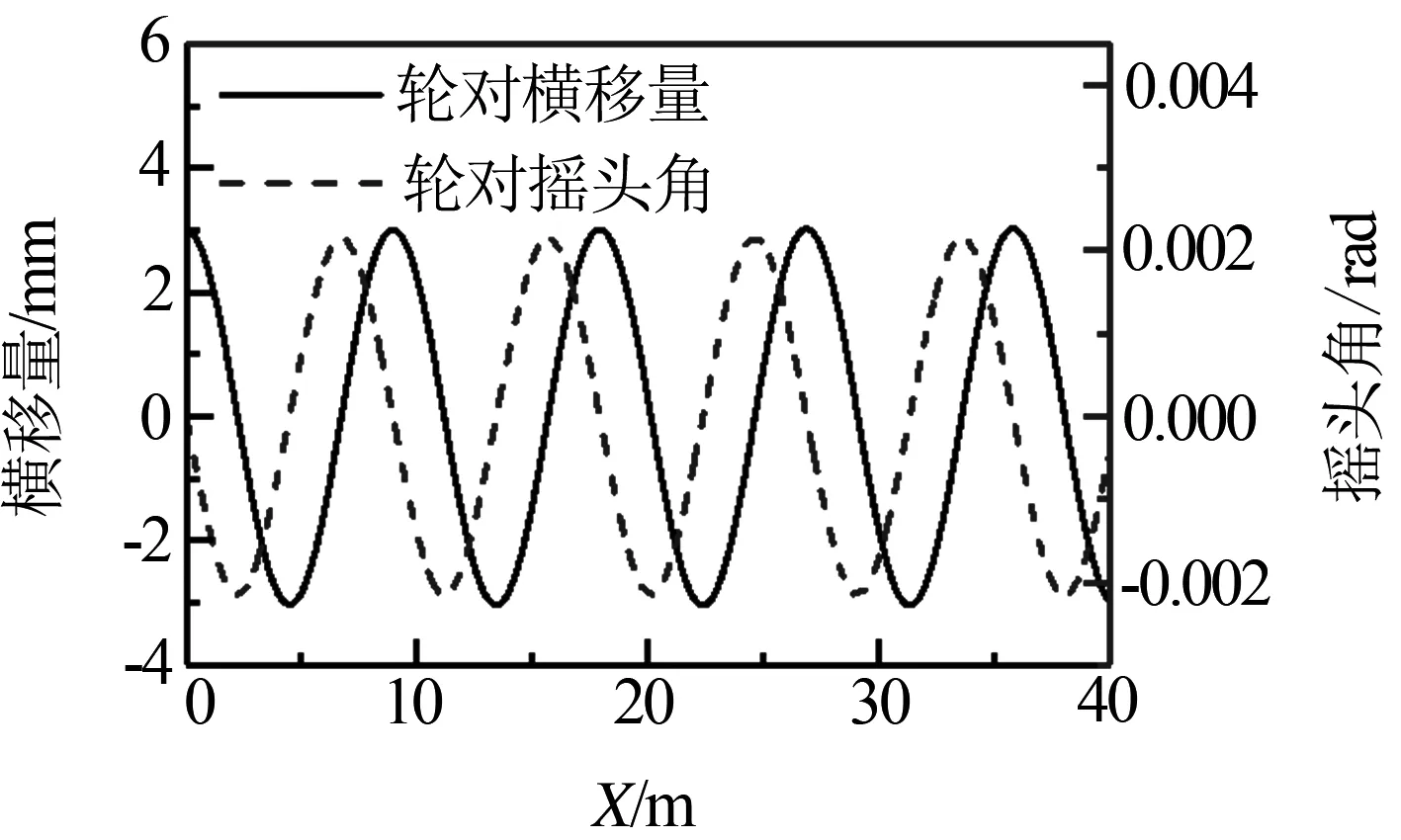
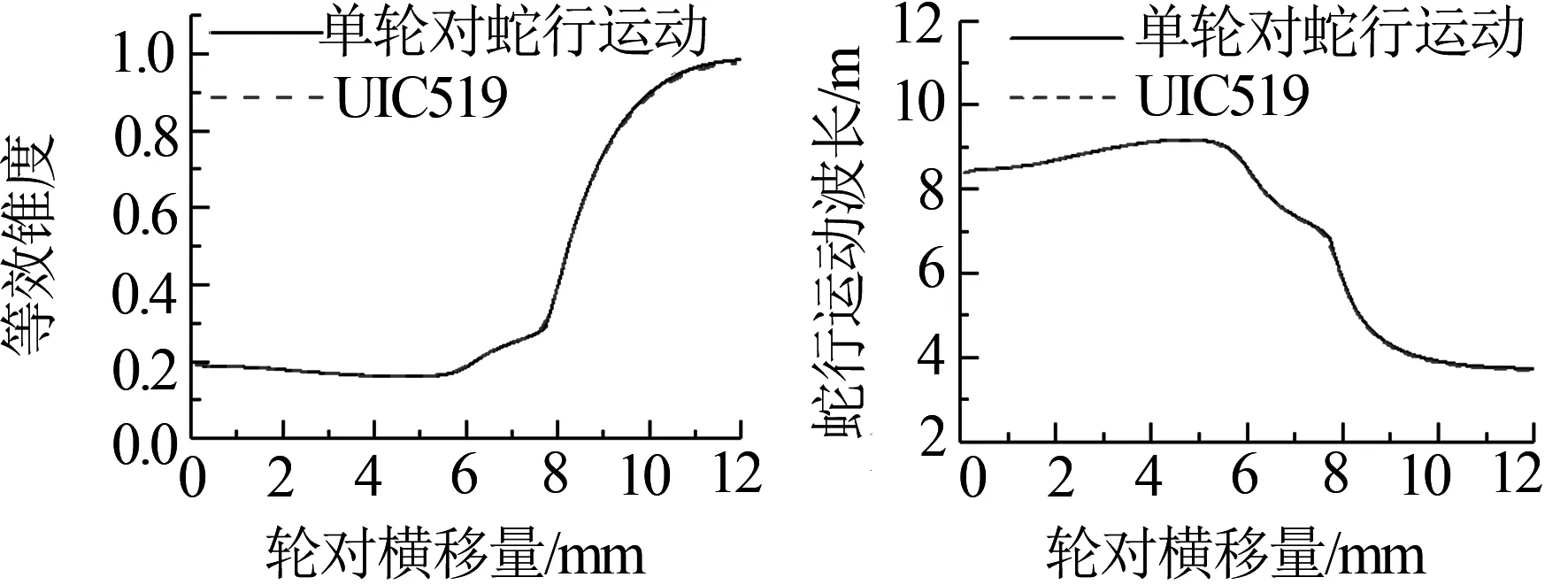
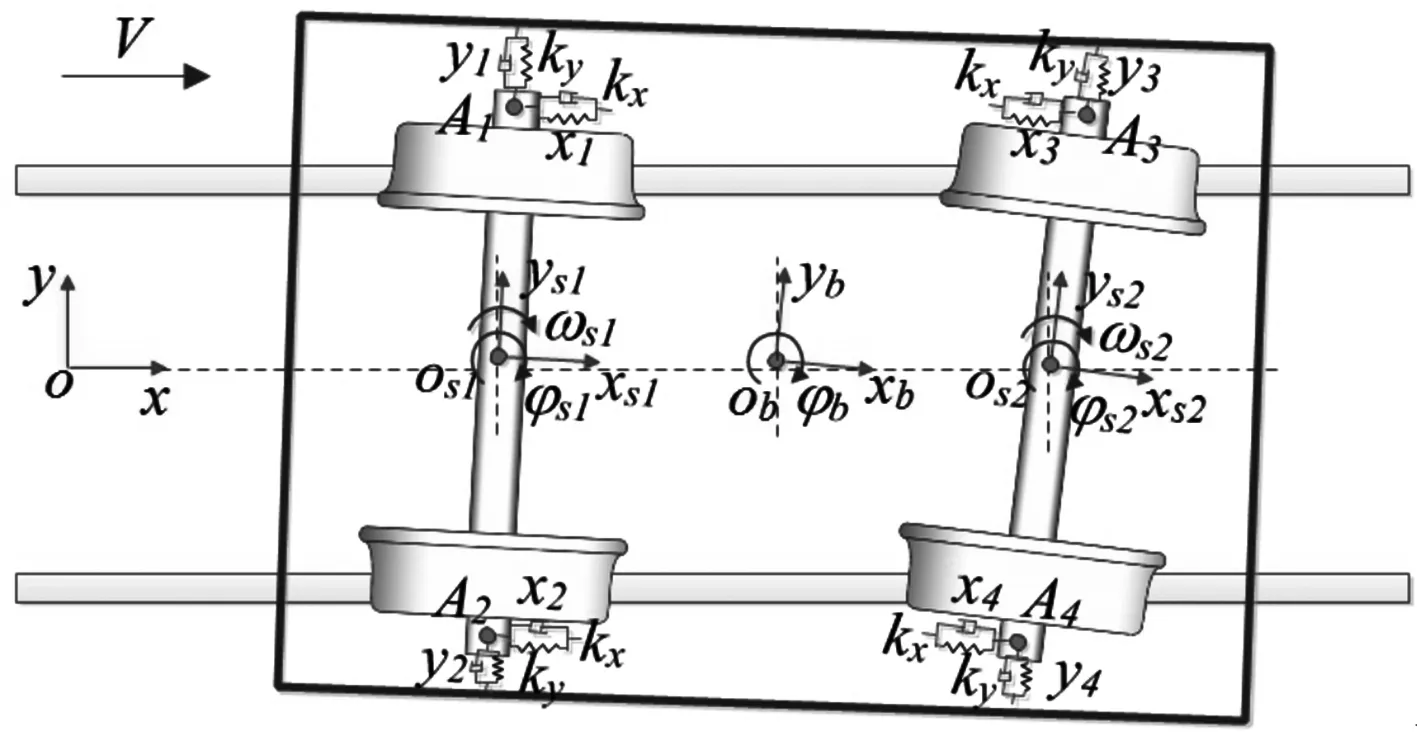
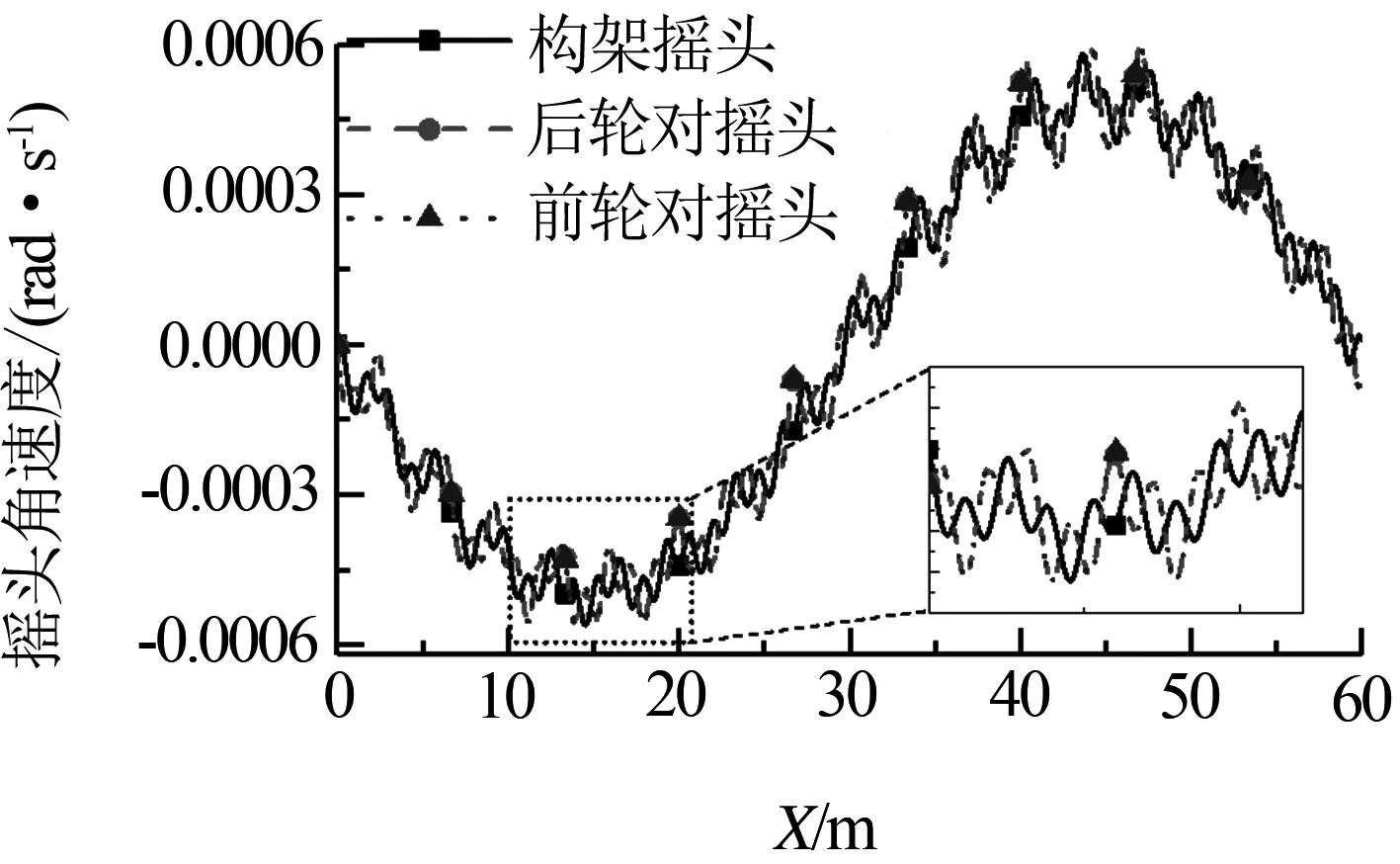
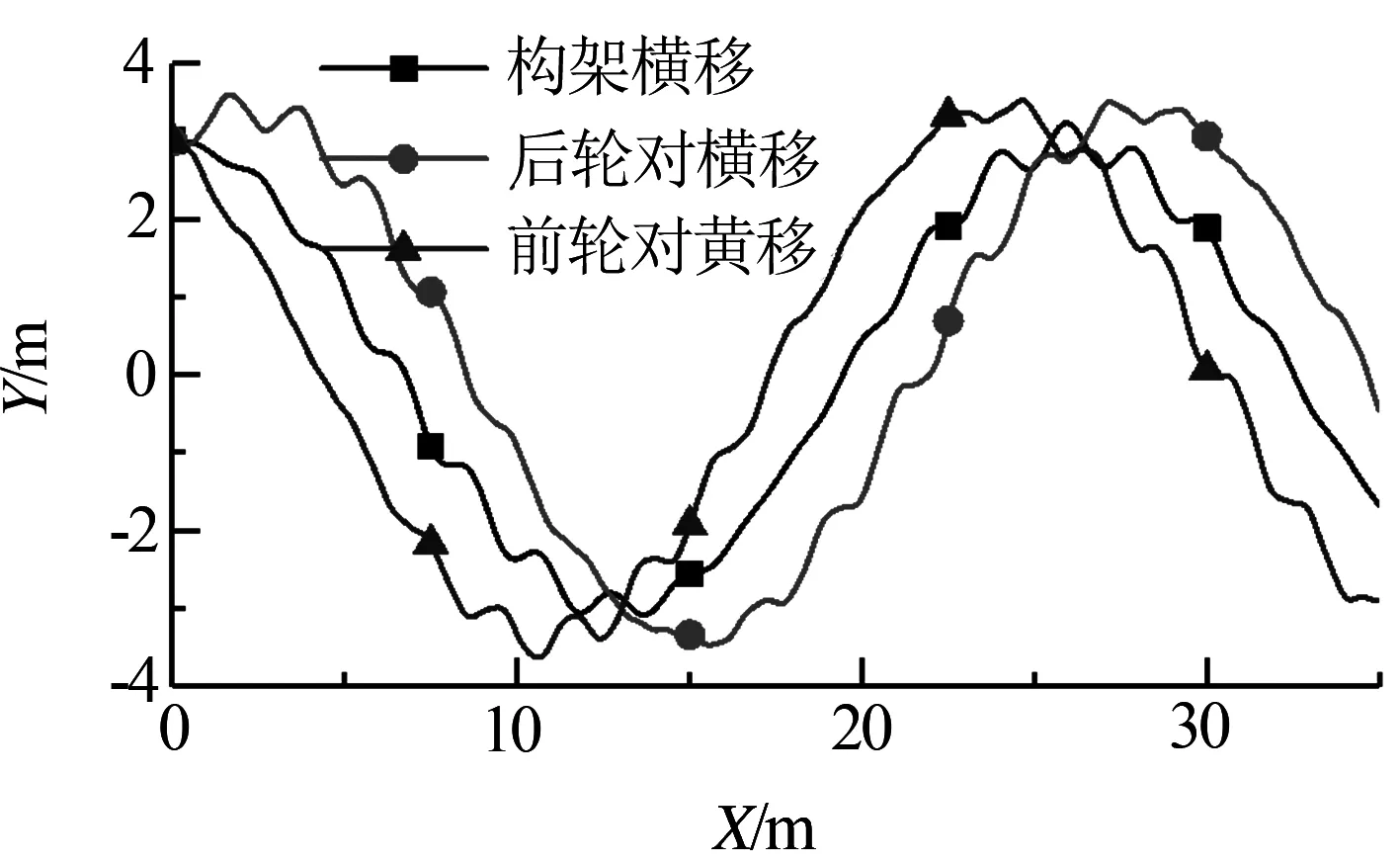
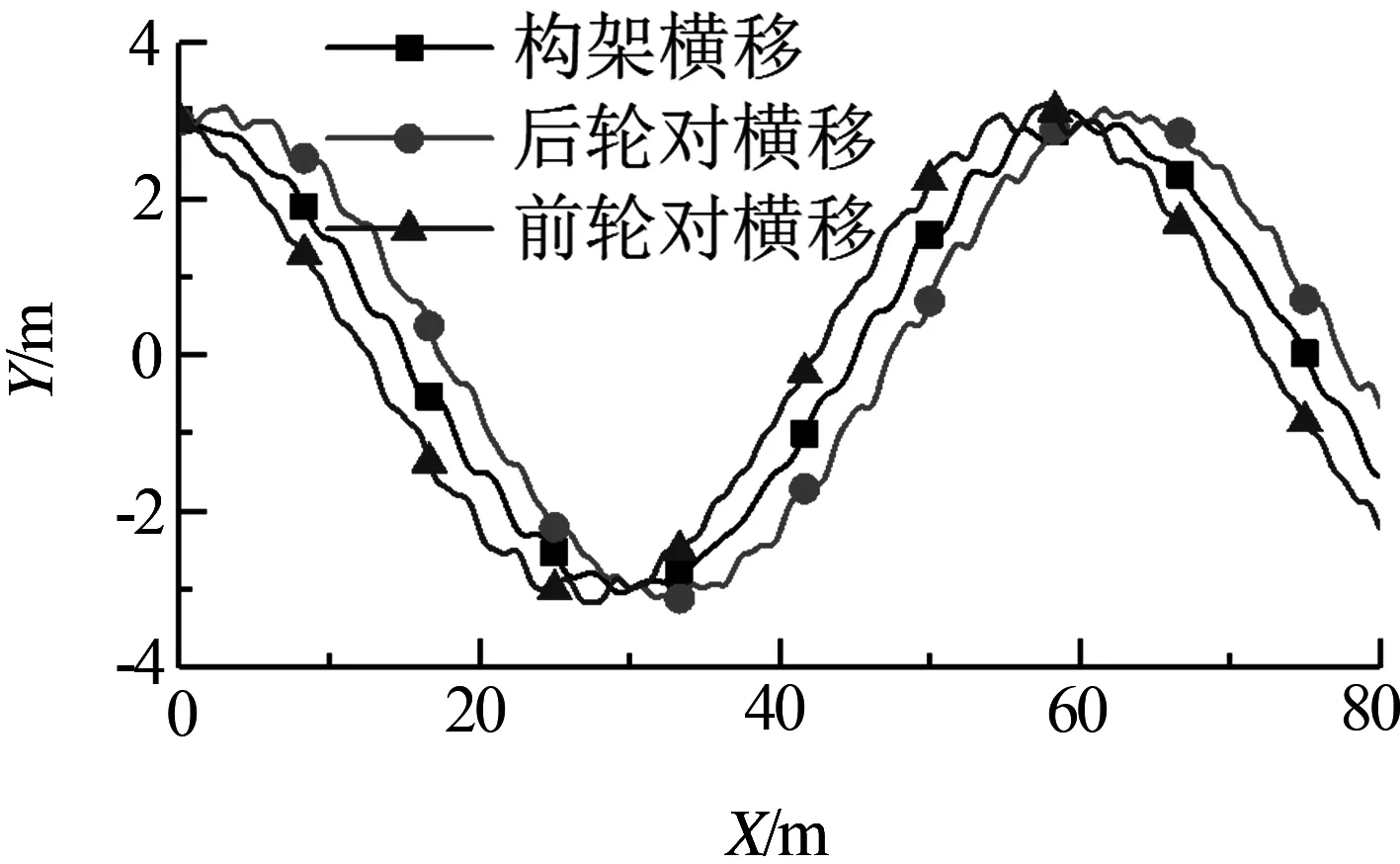
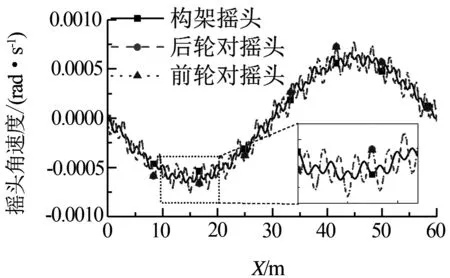
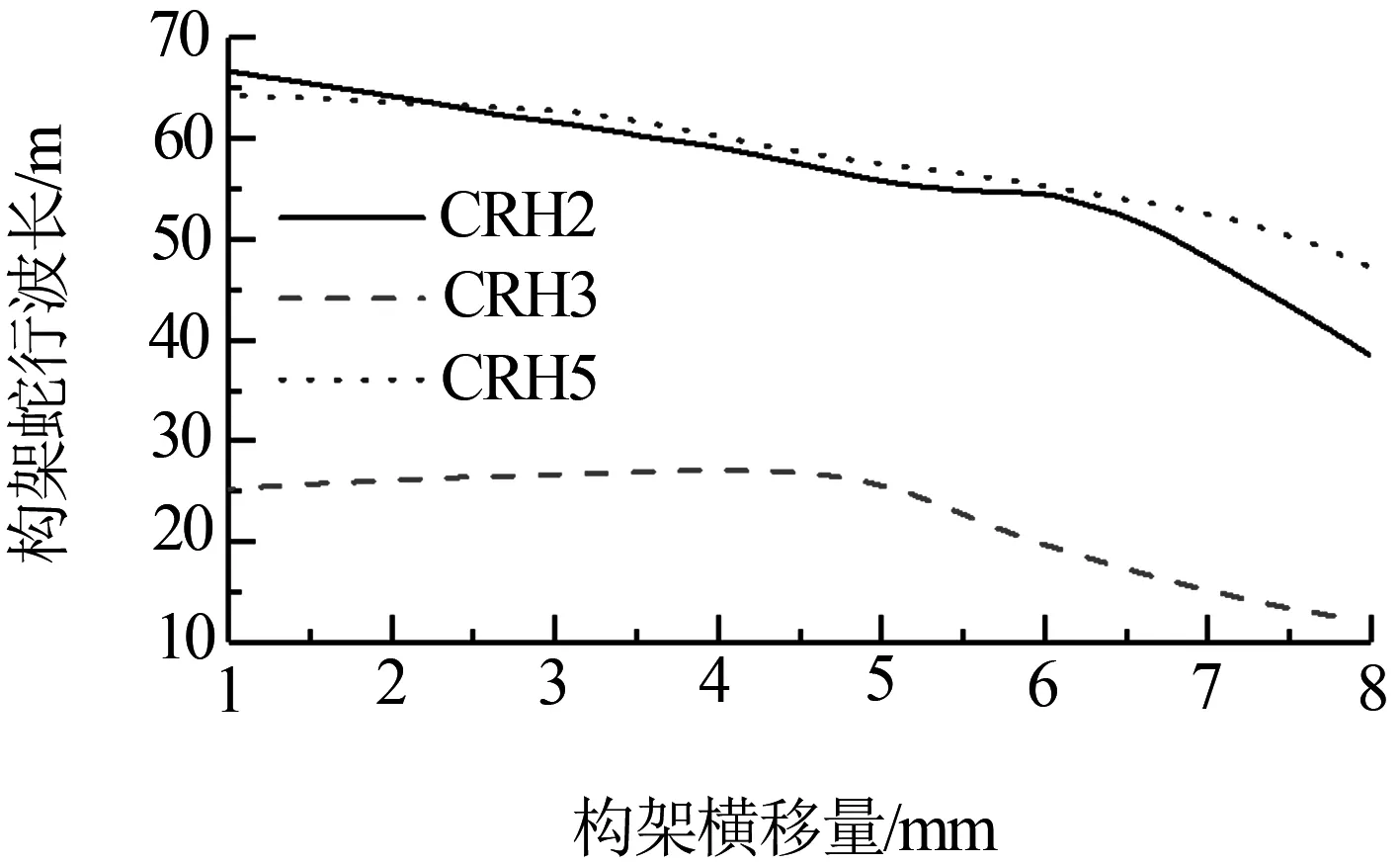
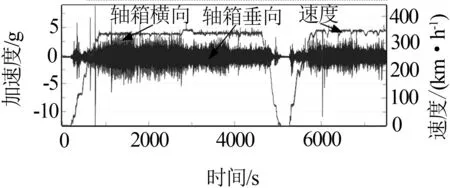
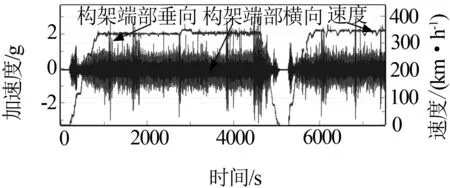
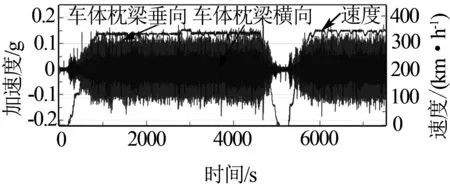
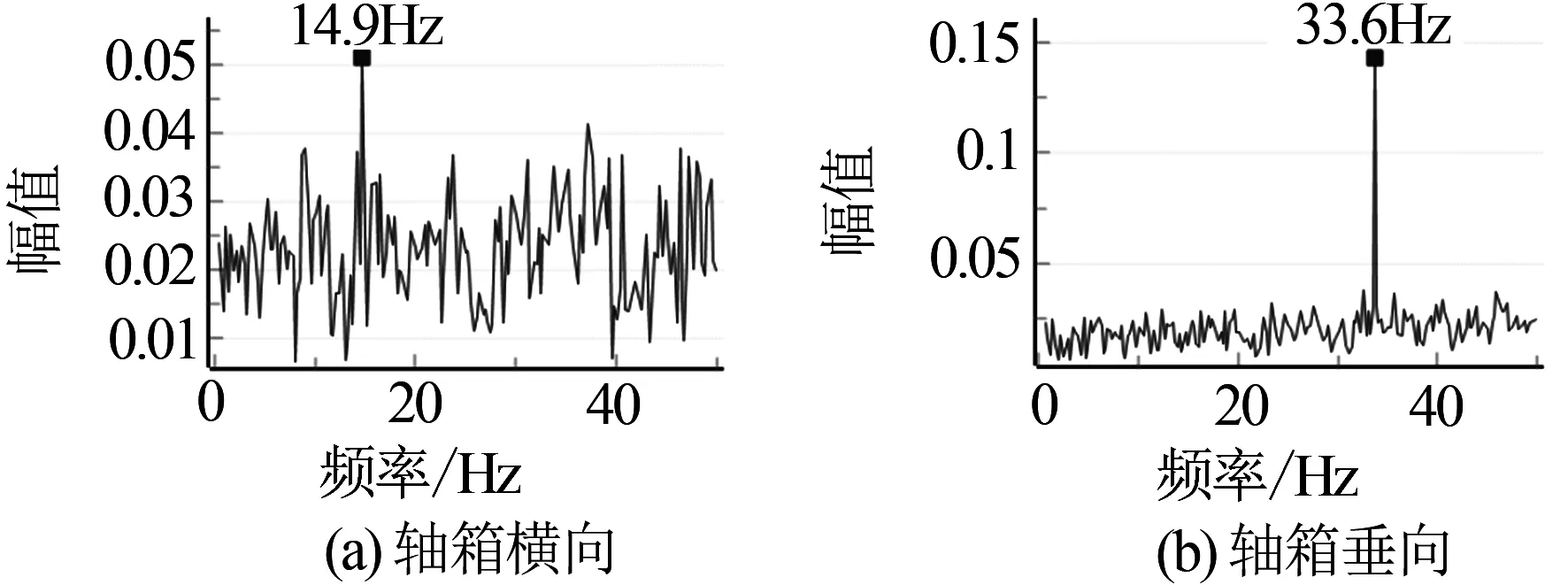
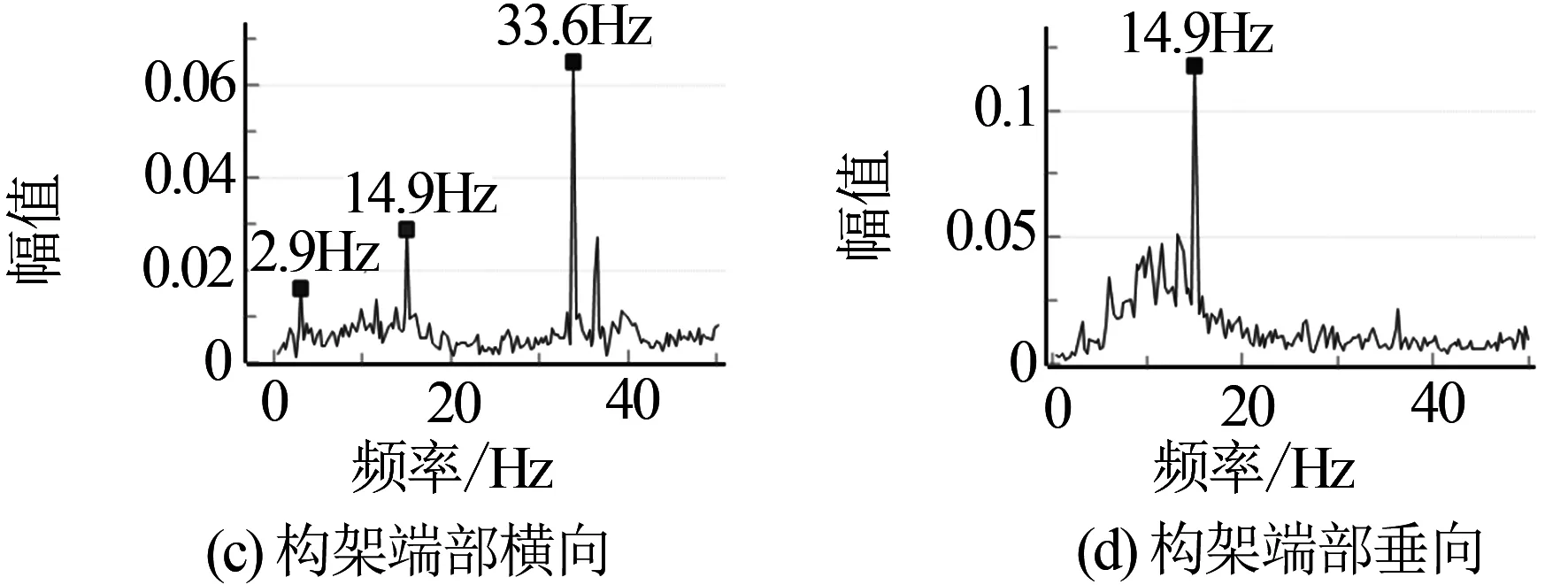
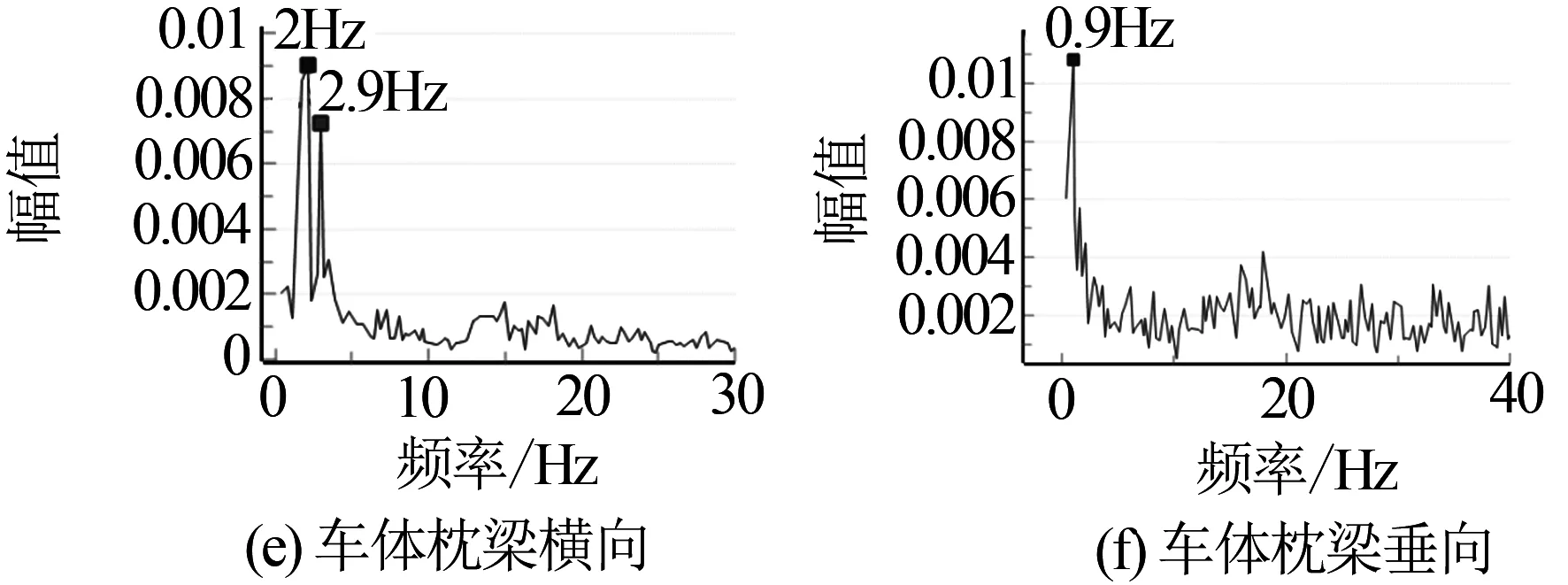
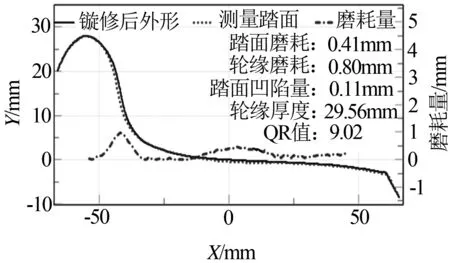
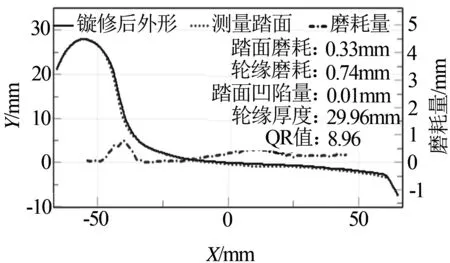
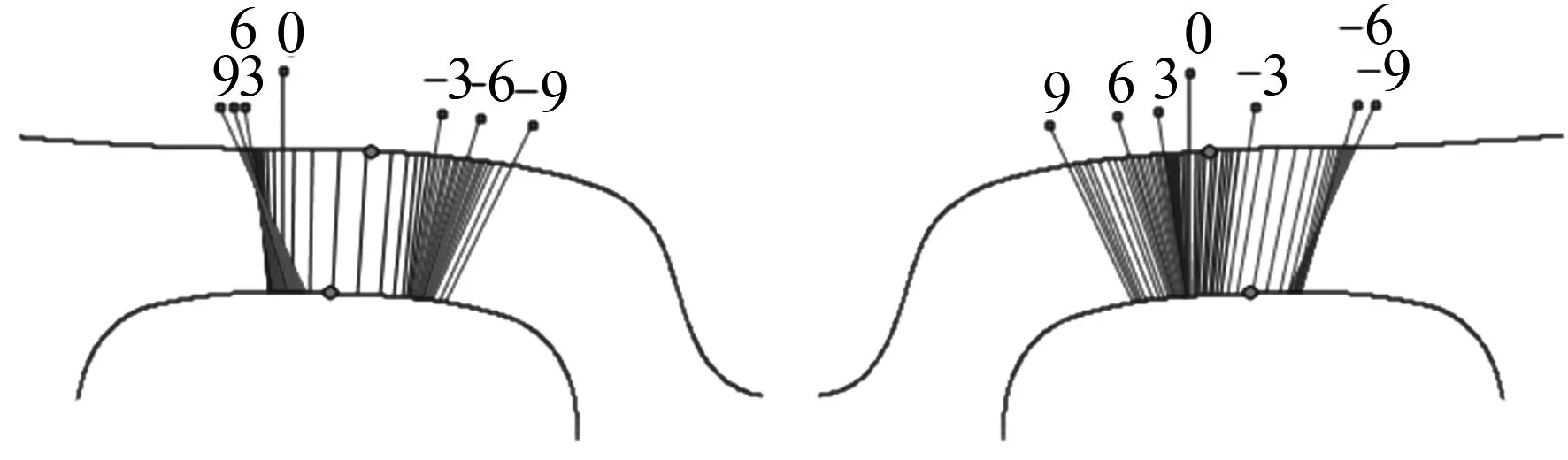
当vl>vr时,轮对的瞬时摇头中心o′在轨面右侧,反之vl 此时摇头角速度φ可由下式得出: (2) 由此摇头中心o′距右侧接触点的距离Rφ和摇头角速度φ分别为: (3) 轮对前进速度和左右侧纵向蠕滑率公式如下: (4) 此时轮对前进速度v0与车轮沿轨道运行速度v一致,即v=v0. (2)轮对有横移有摇头时 当轮对有横移有摇头时,轮对前进速度与车轮 沿轨道运行速度具有一定的摇头角θ,此时车轮沿轨道运行速度v=v0cosθ,轮对横移速度vy=v0sinθ(见图2(b)). 由此得到以下微分方程: (5) 其中,Rl,Rr,Ll,Lr均为y和θ的函数. 图2 轮对蛇行运动分析 以S1002CN踏面和CHN60轨面为例(见图3),采用矢量法[3]实时计算轮轨接触点并求解微分方程(5),计算轮对初始横移3 mm下的蛇行运动,如图4所示. (a) 踏面 (b) 轨面 图4 轮对横移量为3 mm时横移和摇头蛇行运动 图4中可以看出,当给定初始轮对横移量为3 mm时,轮对将做±3 mm的蛇行运动,同时轮对的横移和摇头相位角相差90°. 由此得到横移或摇头波长,可根据Klingel公式得到此时轮对横移量下的等效锥度值. 计算0~12 mm轮对横移量下蛇行运动波长和等效锥度,并与UIC519标准结果进行对比如图5所示. (a) 等效锥度 (b)蛇行运动波长 图5可以看出由自由轮对蛇行运动公式得到的等效锥度和蛇行运动波长变化与UIC519标准得到的结果一致,从而验证了公式(5)的正确性. 我国高速动车组转向架均由一个构架和两条轮对组成,中间采用一系悬挂进行连接,通过安装在构架上的电机驱动安装在车轴上的齿轮箱,带动轮对向前滚动,实现列车的牵引和制动.由于车轮型面近似锥形,左右车轮通过车轴连接后转速相同,当轮对横向偏移后会产生类似于蛇行的自激振动.因此柔性转向架蛇行运动方程必须体现轮对蛇行运动的特性和一系悬挂对前后轮对运动的约束. 令转向架轴距之半为Lb,同一轮对一系簧横向间距之半为Ls,左右轮接触点横向间距之半为Ls1,r为车轮半径,γ为等效锥度,则自由轮对蛇行运动波长λw为: (6) 刚性构架蛇行波长λbg为: (7) 柔性构架蛇行波长λbf为: (8) f为纵向和横向蠕滑系数的平均值. 建立如图6所示的柔性转向架计算模型.令A1,A2,A3,A4分别为一系簧和前后轮对的四个连接点,其坐标分别为A1(-Lb,Ls),A2(-Lb,-Ls),A3(Lb,Ls),A4(Lb,-Ls),kx,ky分别为一系簧的纵向和横向刚度,yb,φb分别为构架的横移和摇头角,xs1,ys1,φs1分别为后轮对的纵向、横向位移和摇头角,xs2,ys2,φs2分别为前轮对的纵向、横向位移和摇头角,xb,yb分别为 (a) 构架和轮对无摇头运动 (b) 构架和轮对有摇头运动 构架的纵向和横向位移,x1,y1分别为后轮对左侧一系簧的纵向和横向位移,x2,y2分别为后轮对右侧一系簧的纵向和横向位移,x3,y3分别为前轮对左侧一系簧的纵向和横向位移,x4,y4分别为前轮对右侧一系簧的纵向和横向位移. 则根据二维旋转矩阵可得一系钢簧位移表达式为: (9) 令轮对质量为ms,摇头转动惯量为Isz,构架质量为mb,摇头转动惯量为Ibz,则构架动力学方程可表示为: (10) 结合轮对蛇行运动方程,前后轮对的纵向、横向和摇头速度可表示为: (11) 式中,前后轮对的纵向、横向和摇头速度方程由自由轮对蛇行运动方程和加速度积分方程两部分组成.自由轮对蛇行运动方程作为轮对自激振动的激励作用于构架,而构架通过一系悬挂的约束来限制轮对的运动. 以CRH2、CRH3和CRH5型车为例,采用上述建模方法分别计算在轮对横移量为3 mm时前轮对、后轮对和构架的蛇行运动,计算参数如表1所示,计算结果如图7所示. 在300 km/h运行速度下,令构架和前后轮对初始横移量均为3 mm,摇头角为0 mm,即ys1=ys2=yb=3,φs1=φs2=φb=0,计算构架和前后轮对的运动方程如图7~图9. 表1 不同车型计算参数表 (a) 横移量 (b)摇头角 (a) 横移量 (b)摇头角 (a) 横移量 (b)摇头角 由图7~图9知,各车型的轮对与构架蛇行波长较为接近.前后轮对同相运动,摇头角幅值相近,略大于构架摇头角幅值.三种车型中,CRH3型车蛇行频率最高,可达3.13 Hz,CRH2型车蛇行频率为1.38 Hz , CRH5型车蛇行频率为1.36 Hz. 在300 km/h运行速度下,计算CRH2、CRH3和CRH5型车构架在不同构架横移量下构架蛇行波长和频率如图10所示. (a) 构架蛇行波长 (b) 构架蛇行频率 由图10知,构架横移量在1~8 mm时,CRH3型车的蛇行频率最高,CRH2型车和CRH5型车的蛇行频率较为接近.CRH3型车在构架横移1~5 mm时,蛇行频率会小幅降低,大于5 mm后蛇行频率会较快增长;CRH2型和CRH5型车的蛇行频率会随构架横移量的增加而逐渐增长. 实测国内以350 km/h高速运行的某型动车组车轮踏面镟修后运行13万公里时轴箱、构架端部和车体枕梁振动加速度如图11所示.由于构架蛇行运动频率较低,因此对振动加速度信号进行了低通50 Hz滤波处理. (a) 轴箱横向和垂向振动加速度 (b) 构架端部横向和垂向振动加速度 (c) 车体枕梁横向和垂向振动加速度 在图11数据基础上截取匀速350k m/h运行时轴箱、构架和车体枕梁振动加速度信号如图12所示. (a) 轴箱横向和垂向振动加速度 (b) 构架端部横向和垂向振动加速度 (c) 车体枕梁横向和垂向振动加速度 从图12中可以看出,经50 Hz低通滤波后,轴箱垂向和横向加速度振动幅值接近,而构架端部和车体枕梁垂向振动加速度均比横向大,且出现明显的低频振动. 分析图12中轴箱、构架和车体枕梁振动加速度频谱和加速区段短时FFT频谱,分别如图13所示. 从图13中可以看出构架端部出现明显的2.9、14.9和33.6 Hz振动频率,其中33.6 Hz在轴箱垂向、构架端部横向与垂向振动加速度频谱中有体现;14.9 Hz在枕梁垂向、构架端部横向和垂向振动加速度频谱中有体现;2.9 Hz在构架端部横向和垂向、车体枕梁横向振动加速度频谱中有体现.并且这些主频在车辆加速区段形成明显的振动能量集中带,且随着速度的变化而变化. 图13 实测车辆350 km/h时轴箱、构架和车体枕梁振动频谱 对上述频率进行分析:车辆运行在该区段时线路使用的轨道板类型为CRTSⅡ型轨道板,其单块长度为6 450 mm,相邻轨道板板缝约为50 mm,相邻轨道板间总长LT≈6 500 mm,则车辆匀速349 km/h的轨道板通过频率为14.9 Hz;车轮半径为0.46 m,则车轮转频为33.5 Hz,与图13中实测频率基本一致.因此确定14.9 Hz频率来源为车辆通过CRTSⅡ型轨道板时频率,33.6 Hz频率来源为车轮转动频率. 实测高速动车组车轮镟修后运行13万公里左右时车轮踏面廓形如图14所示,与标准CHN60轨面匹配时轮轨接触关系如图15所示. (a) 左轮踏面 (b) 右轮踏面 实测车轮踏面与标准CHN60轨面匹配的轮径差、等效锥度和轮轨接触几何关系如图15所示. (c) 轮轨接触几何关系 从图14和图15可以看出,左右车轮踏面在名义滚动圆附近出现凹型磨耗,左右车轮踏面磨耗外形不对称,左右踏面上接触点分布和轮径差曲线也不对称.轮对横移3 mm时UIC519等效锥度为0.14. 高速动车组转向架动力学参数如下:轮对质量为 1901.8 kg;轮对惯量Z为684.65 kg·m2;构架质量为2 280kg;构架惯量Z为2280 kg·m2;轴距之半为1.25 m;一系横向距离为1 m;一系纵向刚度为14.7 MN/m;一系横向刚度为6.5 MN/m. 根据式(10)和高速动车组转向架动力学参数,以及实测车轮踏面轮轨接触关系,仿真计算得到转向架在不同运行速度下轮对横移量和蛇行频率的关系,如图16所示.由图知,轮对横移3 mm,运行速度为350 km/h时的构架蛇行频率为3.0 Hz,与图13中实测频率基本一致,因此确定频率3来源为构架蛇行频率,从而也验证了式(11)的正确性. 图16 不同运行速度下轮对横移量和蛇行频率关系 (1)本文推导的与轮对横移和摇头相关的三个一阶蛇行运动微分方程与基于轮对横移的蛇行运动二阶微分方程计算结果一致,可得到与 Klingel公式计算结果一致的等效锥度曲线; (2)CRH2和CRH5型车的蛇行频率较为接近且低于CRH3型车的蛇行频率.CRH3型车在构架横移1~5 mm时,蛇行频率会小幅降低,大于5mm后蛇行频率会较快增长;CRH2型和CRH5型车的蛇行频率会随构架横移量的增加而逐渐增长; (3)通过求解本文推导的柔性转向架的二阶微分方程得到与实测时速350km动车组的构架蛇行频率基本一致的结果,验证了该二阶微分方程的正确性和有效性.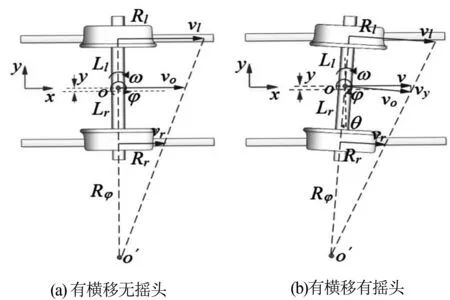
1.2 轮对蛇行运动对比分析
2 柔性转向架蛇行运动方程
2.1 柔性转向架蛇行运动简化计算方法
2.2 柔性转向架蛇行运动精确计算方法

3 不同车型柔性转向架蛇行频率分析




4 柔性构架蛇行运动分析验证
4.1 试验数据分析



4.2 振动频谱分析
4.3 构架蛇行频率分析


5 结论
