数据驱动下桥群水域船舶路径规划*
2020-12-17吴昌胜甘浪雄孙敬东范健宇周春辉
吴昌胜 甘浪雄 孙敬东 范健宇 周春辉 张 磊*
(武汉理工大学航运学院1) 武汉 430063) (内河航运技术湖北省重点实验室2) 武汉 430063) (江苏海事局后勤管理中心3) 南京 210009)
0 引 言
近年来,长江黄金水道建设日益深入,长江干线跨江桥梁工程数量稳步增长,桥梁建设的集群化形成了以近距离、多桥梁为特征的桥群水域[1],给水路交通运输安全带来了更多危机与挑战.随着无人艇、无人潜航器等自主航行技术飞速发展,路径规划研究方法日趋成熟.目前,桥群水域船舶航行仍采用传统人工操舵[2],人为操作造成的航迹误差较大,易引发船-桥碰撞事故,桥群水域路径规划的研究必要性日益凸显.
桥群水域通航环境复杂,为研究桥墩对航行船舶的干扰水动力,范平易等[3]建立了桥墩二维有限元水动力数学模型,分析计算了桥墩对通航的影响及影响宽度.Gan等[4]基于Fluent软件采用准定常与非定常两类方式,模拟了桥墩邻域船舶粘性绕流场,计算分析了桥墩附近水动力特性.为界定桥区水域范围,朱曼等[5]建立失控状况下的船舶运动模型,采用蒙特卡洛法对船-桥碰撞概率仿真计算,得到不同碰撞概率下的桥区水域范围.为优化船舶路径规划,需大量分析AIS数据,肖潇等[6]基于AIS轨迹聚类算法和大数据分析技术,完成AIS数据轨迹聚类,并从中获取典型船舶运动路径.针对桥群水域路径规划,徐言民等[7-8]运用模拟退火粒子算法(SAPSO)对不同维数航路规划模型求解,证明了其在桥群水域航路规划方面的适应性,又计算了桥墩紊流区边界及船桥之间对安全富余量.
综上分析,桥群水域船舶通航安全研究处于探索阶段,利用历史船舶AIS轨迹数据与优化算法相结合方式进行桥群水域船舶路径规划鲜有人提出.开展数据驱动下的桥群水域路径规划研究,对提高船舶航行安全及航行经济效益具有积极意义,使得规划路径更加符合实际,为复杂水域船舶路径规划提供了新思路.
1 桥群水域环境特征
1.1 桥群水域选取
文献[9]中界定桥群水域为:相邻两座及以上桥梁轴线间距较小,干扰各自流场并影响船舶航行视距或形成“巷道效应”时,桥区上、下游边界间的水域范围.桥群水域通航船舶需连续躲避多座桥梁桥墩,船-桥碰撞事故风险更大.
目前,长江武汉段已建桥梁9座,在建桥梁2座,根据武汉桥梁建设规划,至2019年底投入运营桥梁增加至11座.长江武汉段桥梁布设较为密集、平均间距小,船舶需在较短时间内连续穿越多座桥区,是典型的桥群水域.因此,选取长江武汉段桥群水域作为研究水域,见图1.
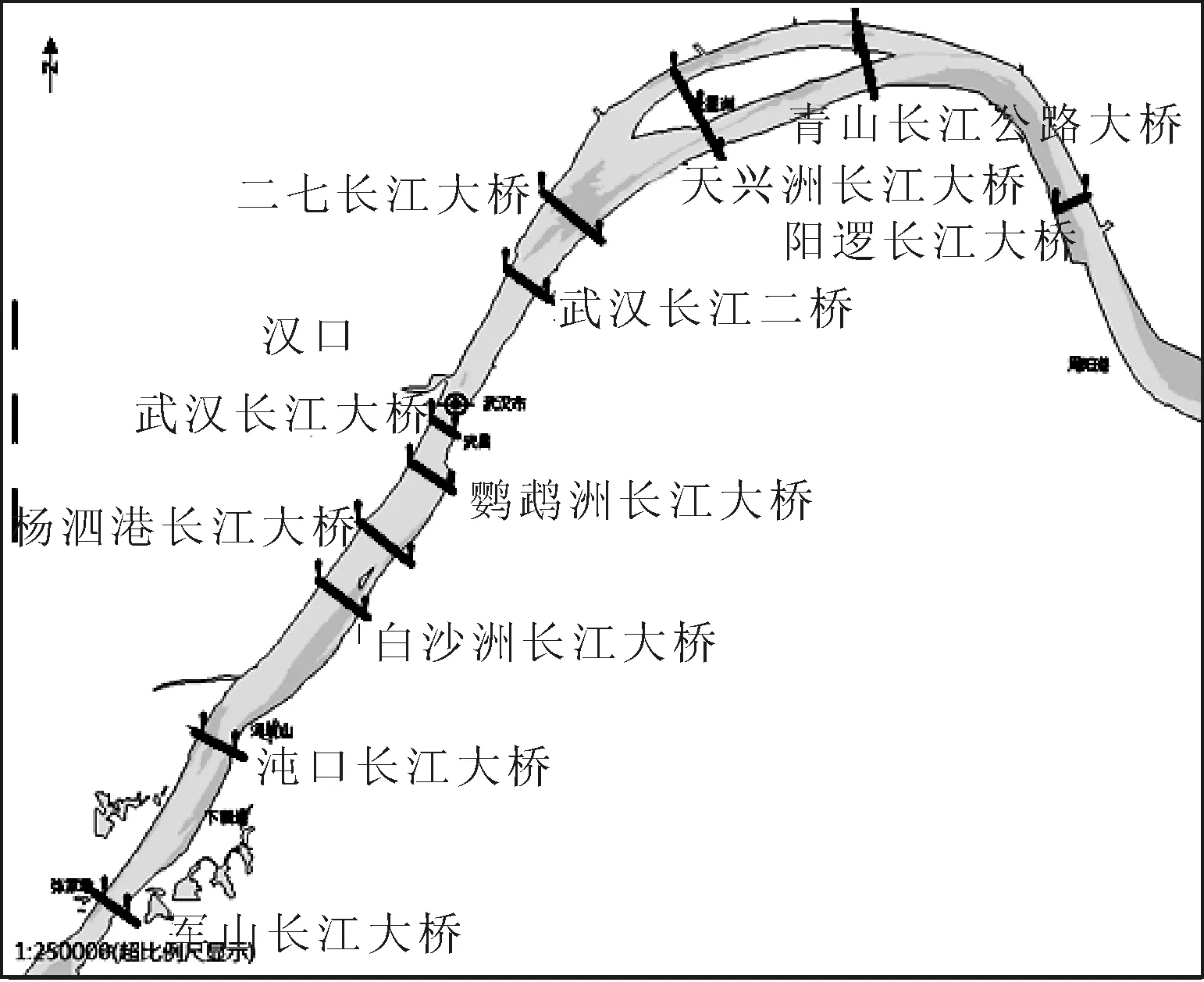
图1 长江武汉段桥梁布设示意图
1.2 桥群水域特征分析
由长江武汉段桥梁布设可知,从白沙洲长江大桥到武汉长江大桥约7.5 km的水域上存在4座桥梁,平均间隔仅为2.5 km.桥群水域船舶航行路线随不同水位期水位及流量变化而改变,各桥梁通航孔主跨尺度存在差异,航道轴线方向上桥墩分布不均、通航孔交替设置以及桥梁轴线不平行,桥梁间距小且水流变化显著.
2 桥群水域环境建模
2.1 流场分布建模
为建立桥区水域水动力模型并获取桥墩附近流场数据,利用Mike21软件对桥区水域进行流场分布建模.Mike21软件在平面二维自由表面流数值模拟方面功能强大,本文运用软件中的水动力模块,主要流程包括基础数据处理、模型构建以及数值解析.
2.2 水动力模型仿真
2.2.1桥区航道地形建模
文中采用实际尺度对武汉长江大桥附近水域进行水动力分析,见图2.首先提取桥区水域详细数据,通过高程转换及水位数据计算得到航道地形数据;其次确定航道边界点,将边界点连线得到航道轮廓线;最后对地形数据差值后得到具体地形数据.
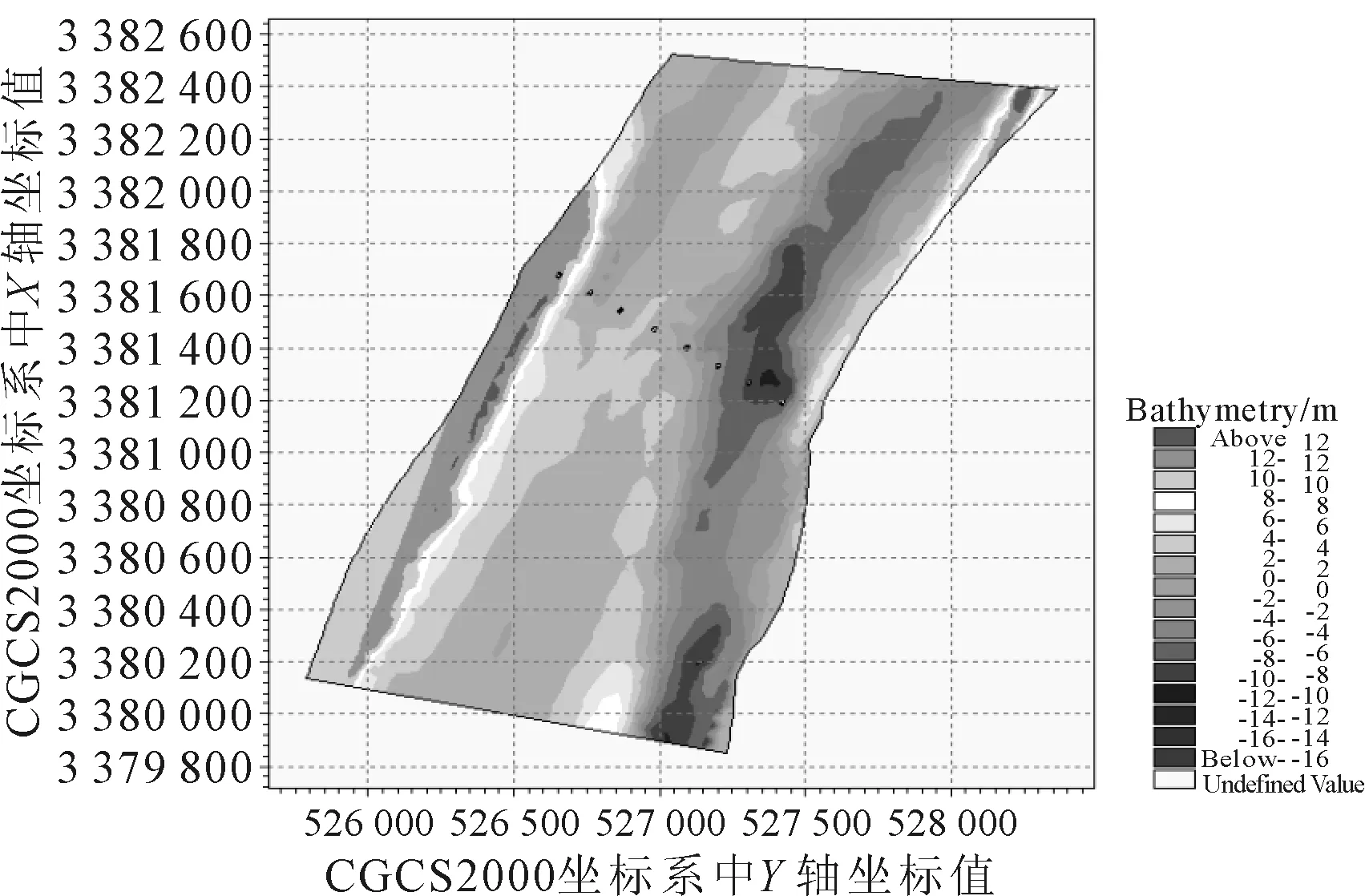
图2 桥区航道地形模型示意图
2.2.2网格化处理及参数设置
桥区航道地形建模后,为得到桥墩周围水动力的精确数据,对航道模型网格化处理,见图3.地形数据精度与网格密度相关,增加桥墩附近网格密度,可进一步优化航道模型.

图3 网格化示意图
航道地形模型网格化处理后保存为m21fm文件,并对航道水位和流量变化参数进行设置.为确保船舶航行安全,选取水位和流量的最高点分析航道水动力数据,其中水位为25 m,流量为50 000 m3/s.桥区水流边界见图4,图中两侧边界为闭合边界,定义为水流覆盖最大边界;上边界和下边界为开边界,分别定义为水流入口和出口.
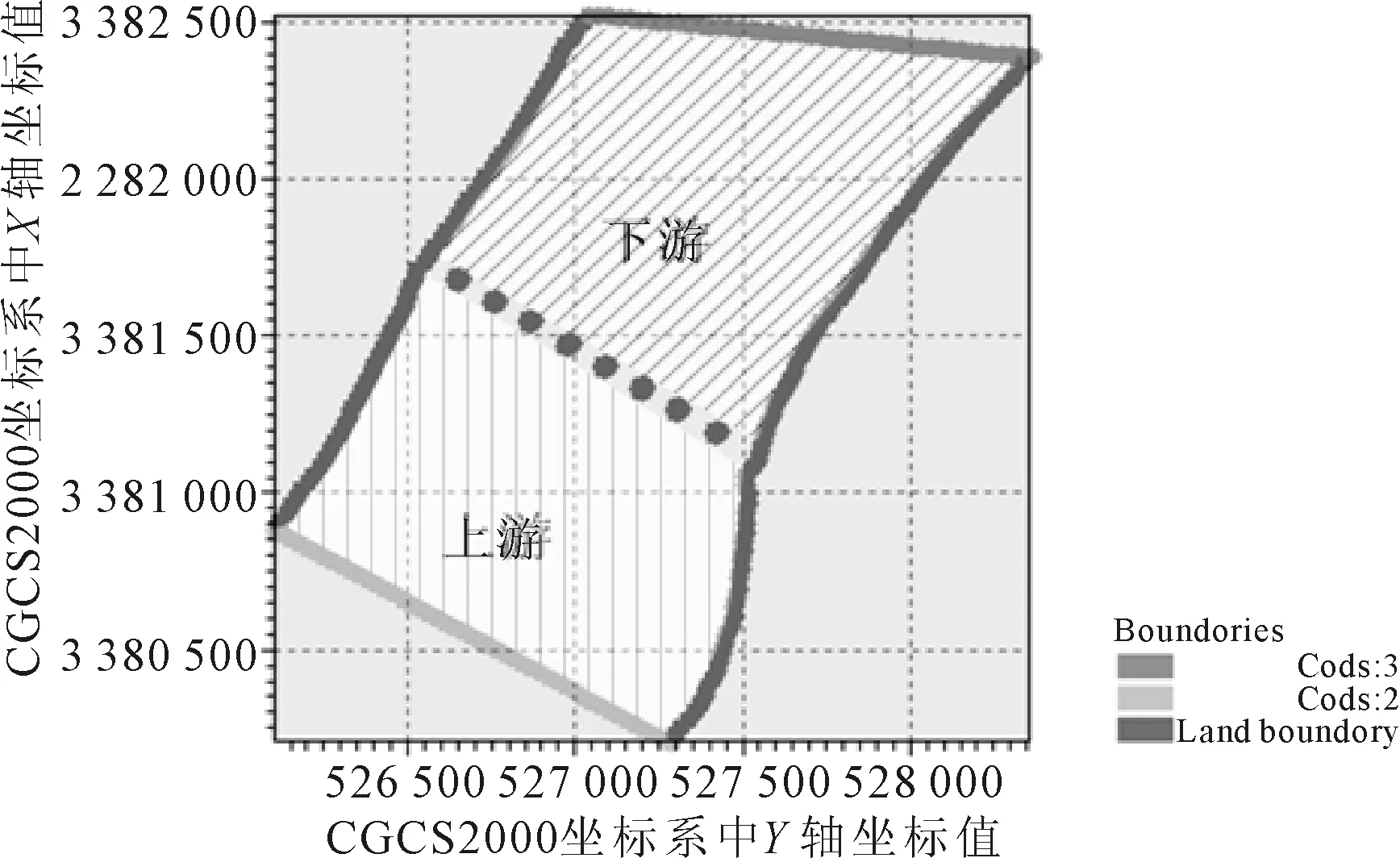
图4 桥区水流边界示意图
2.2.3桥区水域仿真结果
结合航道模型采用Mike21软件对流向流速分布进行仿真,设置360 min运行步长仿真,结果见图5.

图5 仿真结果示意图
2.3 桥墩安全区范围计算
2.3.1桥墩紊流区建模
桥墩附近水域紊流区会对过桥船舶产生影响,严重时会导致船-桥碰撞事故.为此,船舶在桥群水域航行时要避开紊流区,明确桥墩与船舶间的通航安全距离.在桥墩紊流区宽度研究方面,庄元等[10]通过水槽模拟实验总结了圆头桥墩紊流区宽度计算公式为
E=0.88Ks×v0.75b0.56h0.44
(1)
b=(L-B)×sinγ+B
(2)
式中:E为紊流区宽度;b为墩形计算宽度;Ks为墩形相关系数,取0.8;L,B分别为墩长和墩宽;γ为桥轴线法线与水流流向的夹角;v为桥墩附近水流流速;h为桥墩附近水深.
通过水动力模型仿真得到了桥墩附近水域参数数据,利用Mike21软件得出桥墩附近水域流场模型分布情况,见图6.

图6 桥墩附近流场和流向分布图
由桥墩附近水域流场数据可知,最大流速为4.3 m/s,水流与桥墩夹角为5°.通过对鹦鹉洲大桥和武汉长江大桥形成的桥群水域建模计算,桥墩紊流区宽度见表1.

表1 紊流区宽度计算表
2.3.2桥墩安全富裕量
船舶过桥航行中受风流影响会产生风、流漂移,为此桥墩安全区建模中,除桥墩紊流区安全范围外还应增加桥墩安全富裕量,防止船舶因风、流漂移进入紊流区而发生碰撞的风险.Tian[11]对船舶与航道底边间的富裕宽度进行了分析,得出散货船航速大于6 kn的条件下富裕宽度应为1倍船宽.基于此将安全紊流区宽度与安全富裕量数值相加,可得最终桥墩安全区范围.
3 AIS数据转向点聚类
3.1 聚类数据选取
1) 转向角选取 选取长江武汉段单船AIS数据,数据预处理前计算最大转向角约为3.15°,单船轨迹数据预处理后可得最大转向角超过5°.根据实际情况,选取5°作为单船航线转向点阈值筛选转向点,得到每条轨迹转向点数据,运用聚类算法将相近转向点聚类成簇.
2) 转向点筛选 单条航线航迹转向点筛选后,将代表船型在桥群水域航行的航迹从数据库中提取,通过转向点识别获取多船航行转向点数据.以武汉长江大桥与鹦鹉洲大桥形成的桥群水域上行3 000 t级货船AIS数据为例,图7为筛选后生成的转向点数据热力图.

图7 转向点数据热力图
由图7可知,船舶航经桥区水域时转向操作的次数较多,且桥区水域附近的转向点密度更大.两桥间水域也存在船舶转向操作,但相对较少.
3.2 AIS数据聚类效果展示
为更好体现桥群水域船舶航行特征,增加聚类转向点数据后进行分析,以各类数据核心点为圆心画圆,用不同颜色表示聚类数据.转向点聚类整体可视化效果见图8.
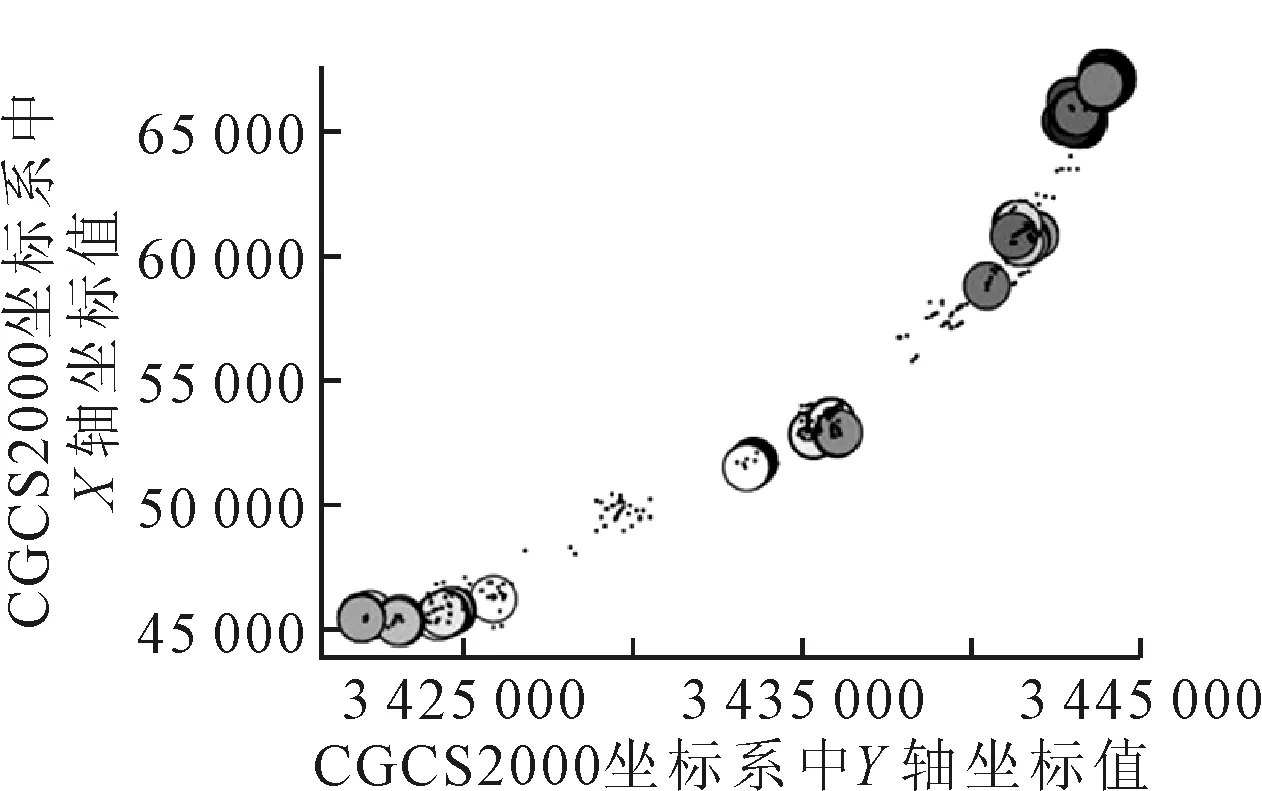
图8 武汉桥群河段整体聚类效果图
为提高聚类结果精度和准确性,将两桥间水域聚类半径范围设置为50 m,桥区水域聚类半径范围设置成20 m,利用matlab对生成节点可视化.桥区水域聚类效果见图9,图中不同轨迹转向点集合,聚类得到的航路转向点范围存在一定的重合.

图9 桥区水域聚类效果图
3.3 转向点连通性辨识
由于不同轨迹转向点集合聚类得到的航路转向点范围存在一定重合,若将各聚类中心点连线,显然与实际船舶航线不符,因此需对航路转向点间的连通性进行判断.为此,提取各聚类结果中的数据,并对转向点连通性进行辨识,将同一MMSI下的点进行连线,见图10.由图10可知,各航路转向点间的关联性存在重叠,各点集连通性关系见表2.
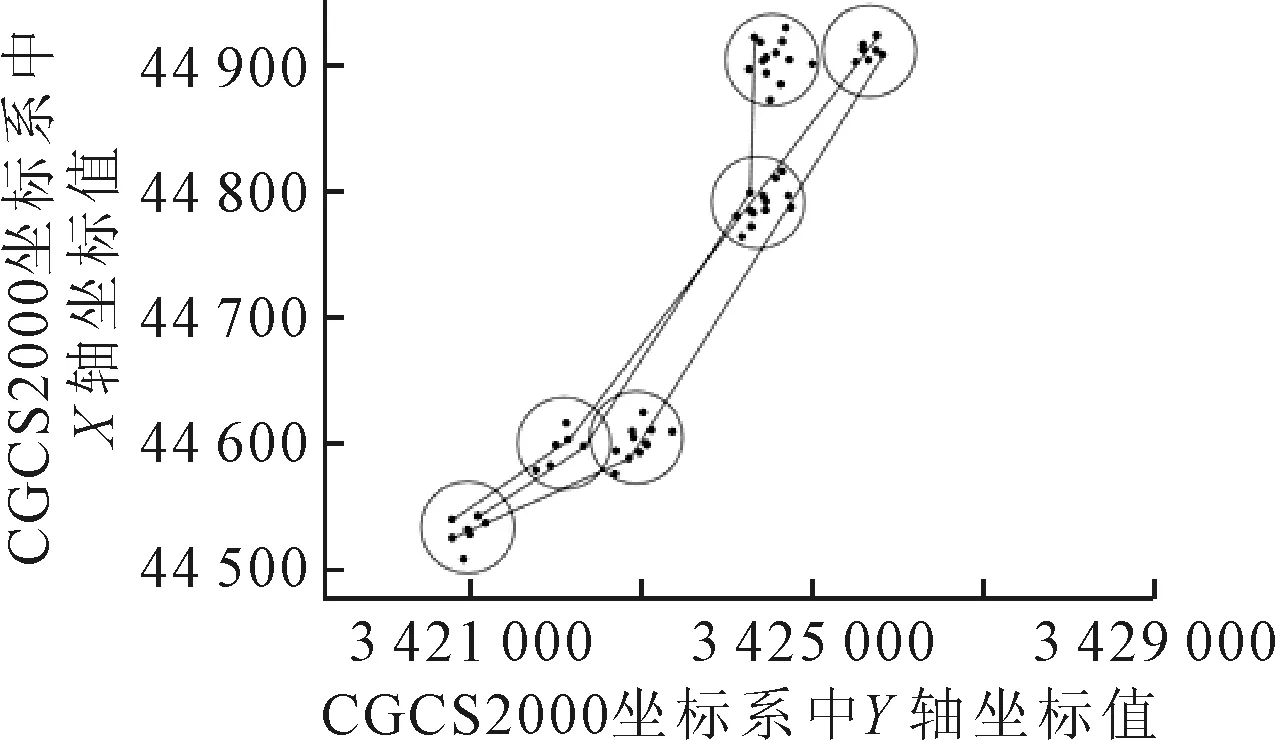
图10 连通性辨识示意图
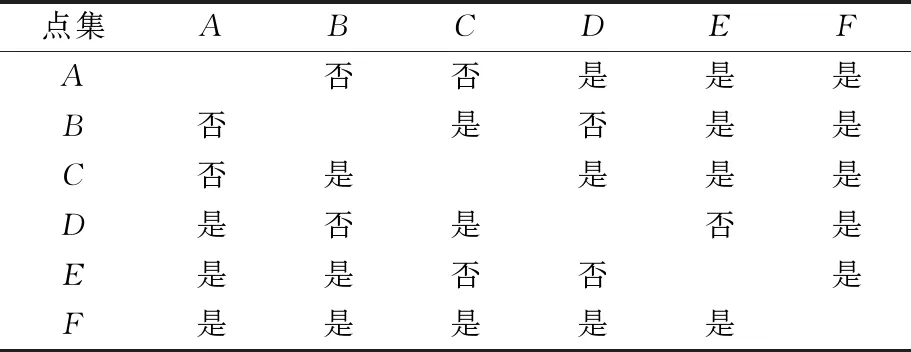
表2 点集连通性是否关系表
将图10中存在三点及以上互有连通性的航路转向点归为一类,各点集可分为三类:S1=[B,C,E,F],S2=[A,D,F],S3=[A,E,F].通过将航路转向点分类可知,该水域船舶航行路线大致可分为三种情况,进行路径规划时需对各类航路转向点点集进行计算.
4 桥群水域路径规划
通过结合桥群水域特征建立桥群水域环境模型,分析桥墩安全区范围,用于规划桥群水域船舶航行路径的边界.将数据分析得到的航迹转向点作为约束条件,采用合适的路径规划算法,以实现数据驱动下的路径规划,见图11.
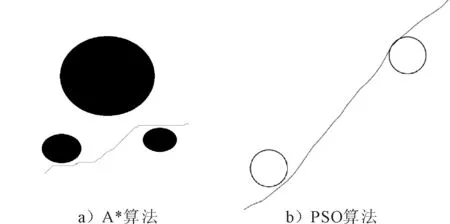
图11 路径规划对比图
船舶路径规划常用算法有:A*算法、粒子群优化算法(PSO)、蚁群算法(ACO),以及遗传算法(GA)等,其中PSO算法是全局寻优的优化算法.通过将A*算法和PSO算法对比,以圆形为障碍物进行路径规划,采用PSO算法得到的结果更符合船舶实际航线,因此PSO算法更加适用于桥群水域的路径规划.
4.1 无数据驱动的路径规划
选定起点为武汉长江大桥桥墩模型下游,终点为鹦鹉洲大桥上游.设定船舶起点与终点坐标,AIS轨迹数据没有加入的情况下,以最小航行距离为路径规划目标,见图12.正常航迹中,船舶从左岸往右岸需穿过第三个通航孔.未加入航路转向点时获取最短路径,背离了桥群水域通航规则,结果与历史实际航线数据不符.

图12 无数据驱动下路径规划效果图
4.2 数据驱动下的路径规划
充分考虑桥群水域环境特征对路径规划的影响,将轨迹分析与数据处理技术应用于数据驱动,通过大数据平台对轨迹和环境数据处理,再设置路径起止点自动进行路径规划.利用数据挖掘、聚类分析等方法得到桥群水域船舶转向点,将其作为约束条件与环境信息建模结合,通过历史船舶AIS轨迹数据驱动,实现桥群水域船舶路径规划.
以AIS数据聚类分析得到的航路转向点作为约束条件,将转向点数据分为两组.进行最短路径规划的同时航迹需穿过设定转向点,航路转向点的加入使得路线中拐点增加,通过对历史经验数据分析得到具有转向特征的点位,改变了路径规划路线,见图13.
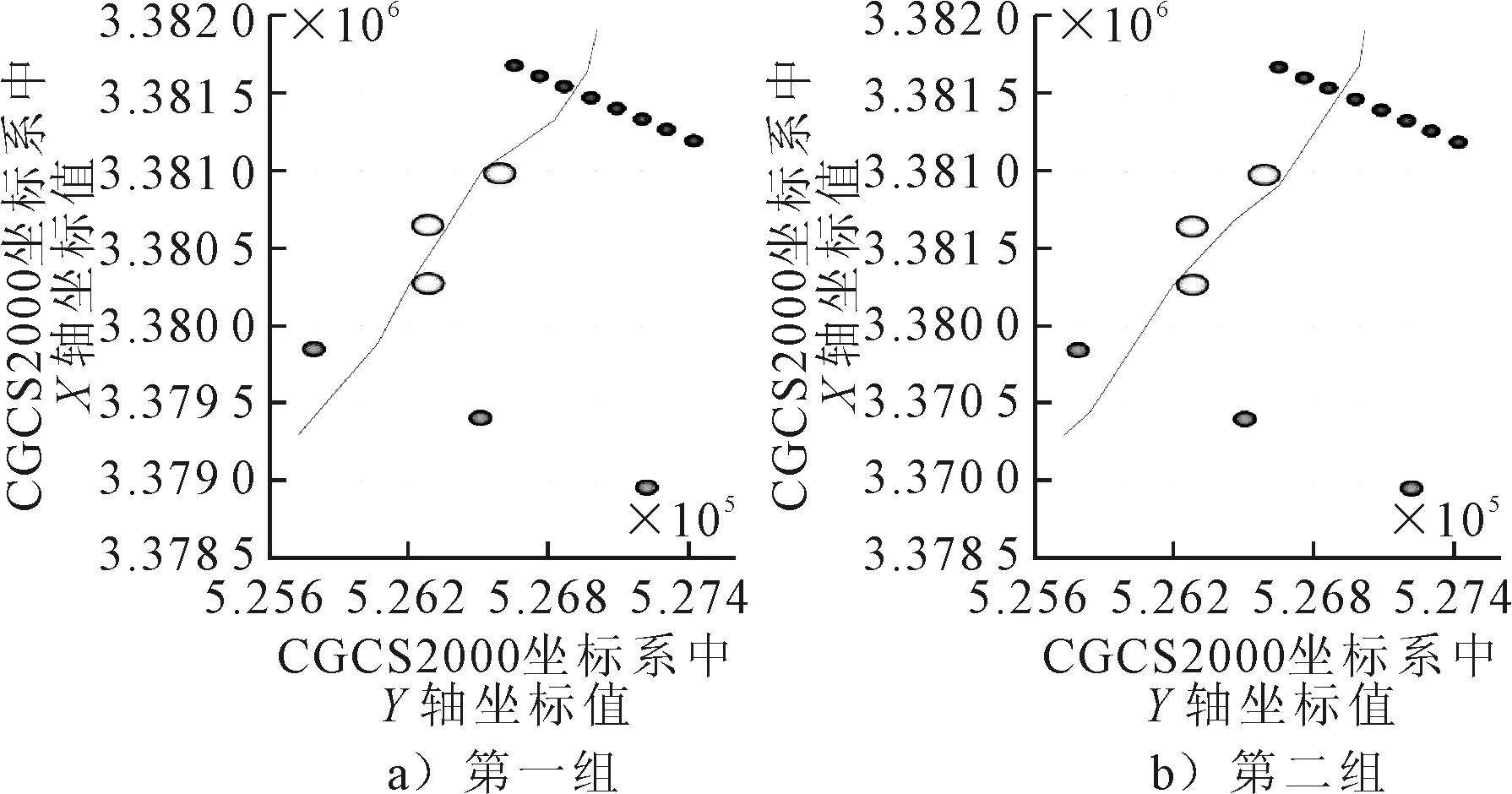
图13 数据驱动下路径规划效果对比图
由图13可知,基于数据驱动的船舶规划路线,遵循了历史实际AIS轨迹特征的第三通航孔,更符合船舶实际通航特征.为选取最优规划路径,通过筛选轨迹数据并计算路径长度,可得第二组数据的规划路径长度更短,规划路径精度更高.
5 结 束 语
为优化桥群水域船舶路径规划,基于武汉段长江实际地形数据构建水动力模型,计算桥墩紊流安全区范围.结合桥群水域船舶通航特征,对AIS轨迹数据聚类并辨识航路转向点连通性,采用PSO算法进行实例路径规划对比.实例验证表明,所建立的路径规划环境模型更真实可靠,AIS轨迹数据的融入使得路径规划更符合船舶实际航行线路,规划路径精度更高,进一步验证数据驱动对桥群水域的路径规划具有实际意义.然而,本文只考虑了静态路径规划,后期可结合周围动态环境进行动态路径规划研究.
