肠道机器人三维接收线圈的设计与优化
2020-12-15温桠妮颜国正王志武姜萍萍薛蓉蓉王艺芸
温桠妮, 颜国正, 王志武, 姜萍萍, 薛蓉蓉, 王艺芸
(上海交通大学 电子信息与电气工程学院,上海 200240)
胃肠道疾病严重危害人类身体健康,2017年,我国城市居民恶性肿瘤的死亡率为160.72/10万,其中胃肠道恶性肿瘤的死亡率为30.74/10万,占恶性肿瘤死亡人数的19.13%[1].目前,医疗上常采用传统内窥镜进行胃肠道疾病的诊查,这种诊查方式不仅给病人造成极大的痛苦,而且存在漏检、肠道损伤甚至穿孔、引起并发症等问题.近年来,胶囊胃肠道机器人引起越来越多科研工作者的关注,逐渐成为国际机械电气及精密医疗仪器领域的研究热点[2].胶囊机器人克服了传统内窥镜的缺陷,是下一代肠道诊查辅助产品的发展方向.由于胶囊机器人具有在肠道内自主运动、驻足停留、采集图像等功能,其功耗在500 mW以上[3].然而,现有电池的能量密度无法满足其功率需求.因此,胶囊机器人的供能问题已经成为制约其向主动式多功能方向发展的“瓶颈”.
胶囊机器人供能目前通常采用基于磁耦合原理的无线能量传输(WPT)技术.李达伟等[3]研究了三维发射线圈和单维接收线圈驱动的肠道机器人,但机器人的姿态稳定性较差,且发射线圈容易受环境影响.Carta等[4]设计了一种基于圆柱体磁芯的三维接收线圈,然而其叠加绕线方式导致三维线圈相互影响,线圈散热效果差,实际能量传输效率较低.Jingyang Gao等[5]设计了一种分布式空心圆柱状三维接收线圈,其圆线圈和平面线圈组的最大接收功率差距大,在机器人姿态变化的情况下,该结构不利于机器人内部供能的稳定性.
基于以上分析,为确保在任意姿态下接收线圈能感应到交变磁场,本文选择了单维发射-三维接收的无线供能技术,探究了一种新型三维接收线圈绕制模式.从磁芯直径、线圈匝数与线径3个方面,通过一系列对比实验,分析结构参数对传输效率和传输功率的影响,从而确定该接收线圈的最优尺寸.基于优化的接收线圈结构,探究了接收线圈在不同姿态角下能否满足肠道机器人功率要求.
1 无线供能系统概述
1.1 一维发射装置
发射线圈由1对完全相同的螺线管构成,2个半径为rp的螺线管同轴放置,中心距为rp,如图1所示.该发射线圈结构结合了Helmholtz线圈和长螺线管线圈的特点,其中Helmholtz线圈内部磁场均匀性最好,长螺线管在相同驱动电流下内部磁场磁通密度大.基于以上特点,螺线管对内部均匀磁场能满足传输功率稳定性的要求,故本文采用螺线管对作为系统的无线能量发射线圈[6-8],且工作频率为218 kHz.

图1 发射线圈模型
1.2 三维接收装置
接收线圈随着机器人在肠道内运动,线圈姿态具有不可预知性.为了解决机器人在人体内姿态随机变化而导致的姿态稳定性问题,本文设计了1种特殊的三维接收线圈,如图2所示.3组线圈绕制在1个具有特殊结构的3D打印模型上面,模型内部是磁芯,由于3组线圈相互垂直,线圈间的互感可以忽略.除此之外,3组线圈绕制均匀、相互分离,不存在叠加绕制的问题,因此相互间的电磁干扰极小.锰锌铁氧体磁芯可以大大提升线圈间的耦合系数,从而显著提高无线供能系统的传输效率.由于无线供能系统的工作频率是218 kHz,根据高导型锰锌铁氧体材料的初始磁导率与频率的关系曲线,本文选择R10K锰锌铁氧体作为磁芯材料.

图2 接收线圈模型
1.3 三维接收线圈串并联选择
三维接收线圈具有串联和并联两种连接方式.串联输出可以等效为具有一定内阻的电源串联,3组线圈的产生的感应电动势叠加、等效串联电阻叠加;并联输出可以等效为3个电源并联,只有感应电动势最大的线圈输出,阻值为3组线圈的绕阻并联[9].
根据法拉第电磁感应定律,接收线圈感应电动势为
(1)
式中:n为线圈匝数;Δφ为磁通量变化量;t为所用时间.进而得:
E=nBSωsinωt
(2)
式中:B为磁场强度;S为横截面积;ω为角频率.
因为3组线圈均匀绕制且绕制匝数是相同的,所以3组线圈具有相同的绕阻R.感应电动势取峰值,根据上式以及姿态函数可得串联输出电压为
(3)
并联输出电压为
(4)
式中:RL为负载电阻;Sa、Sb、Sc为各个线圈在磁场方向的投影面积.为了判断串联输出和并联输出的临界条件,定义负载电阻和单维线圈绕阻之比为
J=RL/R
(5)
在0~360°范围内对输出电压Vs进行积分运算:
dαdβ
(6)
|gc(α,β)|}dαdβ
(7)
式中:α为绕x轴转动角;β为绕y轴转动角;g为线圈姿态函数.
因此,串联输出优于并联输出的临界条件为[10]
J>4.15
(8)
2 三维接收线圈性能及优化
2.1 机器人系统正常工作能量需求
在肠道机器人系统中,功耗较高的模块包括图像传感器、LED照明和自动对焦系统在内的视频模块、控制通讯模块及主动运动模块,如表1所示.为了保证机器人在体内能够正常工作,无线供能模块最低需提供500 mW 的能量.实际情况下,机器人在无线充电过程中,患者将平躺在实验台上,因此无线供能的传输距离基本不变.

表1 肠道机器人各模块功率需求
2.2 无线供能系统传输效率
无线供能系统的等效串联式谐振电路模型如图3所示,其中:M为线圈之间的互感;C1和C2分别为发射端和接收端的调谐电容;L1和L2分别为发射线圈和接收线圈的电感;Vt为发射线圈电压;Rt和Rr分别为发射线圈和接收线圈的绕阻.

图3 电磁感应电路原理
考虑能量发射端和接收端都谐振的情况,上述闭合回路可由下式表述[11]:
(9)

由于该无线供能系统中接收线圈和发射线圈之间为弱耦合,且It相对Ir极大,所以接收线圈对发射线圈的影响可以忽略不计.因此,上式变为
(10)
接收线圈中的电流为
(11)
发射线圈中的电流为
办事中心为用户提供启动事项办理流程、接受办理任务、审批任务、查询事项进展的统一入口,为了更直观、全面地展示事项进展,按事项的生命周期将平台功能分为可办事宜、待办事宜、进行中事宜、已结束事宜等模块。按用户角色分为教职工和学生两种。各模块功能如下:
(12)
由上述两个式子可以推导出传输效率为
(13)

负载的接收功率为
(14)

2.3 三维接收线圈姿态稳定性分析
接收线圈随着机器人在人体内运动,其姿态随机不可控.螺线管对发射装置激发的交变磁场沿线圈中心轴线方向分布,具有单向性.本文所采用的接收装置可以确保任意姿态的接收线圈在单向的交变磁场中感应能量.引入姿态函数[12]g(α,β)来定量描述三维接收线圈的姿态,如图4所示,图中B为磁场方向.因此,线圈a、b、c的姿态函数可以分别表示为

图4 三维接收线圈原理图
(15)
各个线圈在磁场方向的投影面积可表示为
(16)
式中:S0为线圈投影面积,S0=πr2,r为三维线圈凸出圆管的半径.
3 实验与分析
发射线圈以ABS材料为骨架,采用AWG38分束多股漆包线绕制,直径为400 mm,螺线管对间宽度为200 mm[13].LC串联谐振回路由可调电感、真空电容器和发射线圈组成,通过调节真空电容值大小,可以保证LC回路始终出于谐振状态.单片机产生218 kHz的方波驱动信号,由4个MOSFET器件构成的全桥逆变器驱动LC 回路.
3.1 接收线圈磁芯尺寸和绕制匝数优化
在给定的空间内选择合适的磁芯,从而提高无线供能系统的传输效率.为具体研究磁芯尺寸和绕制匝数对η和PL的影响,如图5所示,分别磨制直径D=4、6、8 mm的磁芯,设定漆包线径为0.1 mm,在3种负载电阻下进行能量传输实验.搭建如图6所示的实验测试平台,该实验测试平台是依据电磁感应原理与三维接收线圈优化需求搭建,并不涉及优化参数(磁芯尺寸、线圈绕制匝数和线径)的改变,所有优化参数的改变来自于接收线圈本身.当发射线圈电压为8 V时,其传输效率η如图7所示.
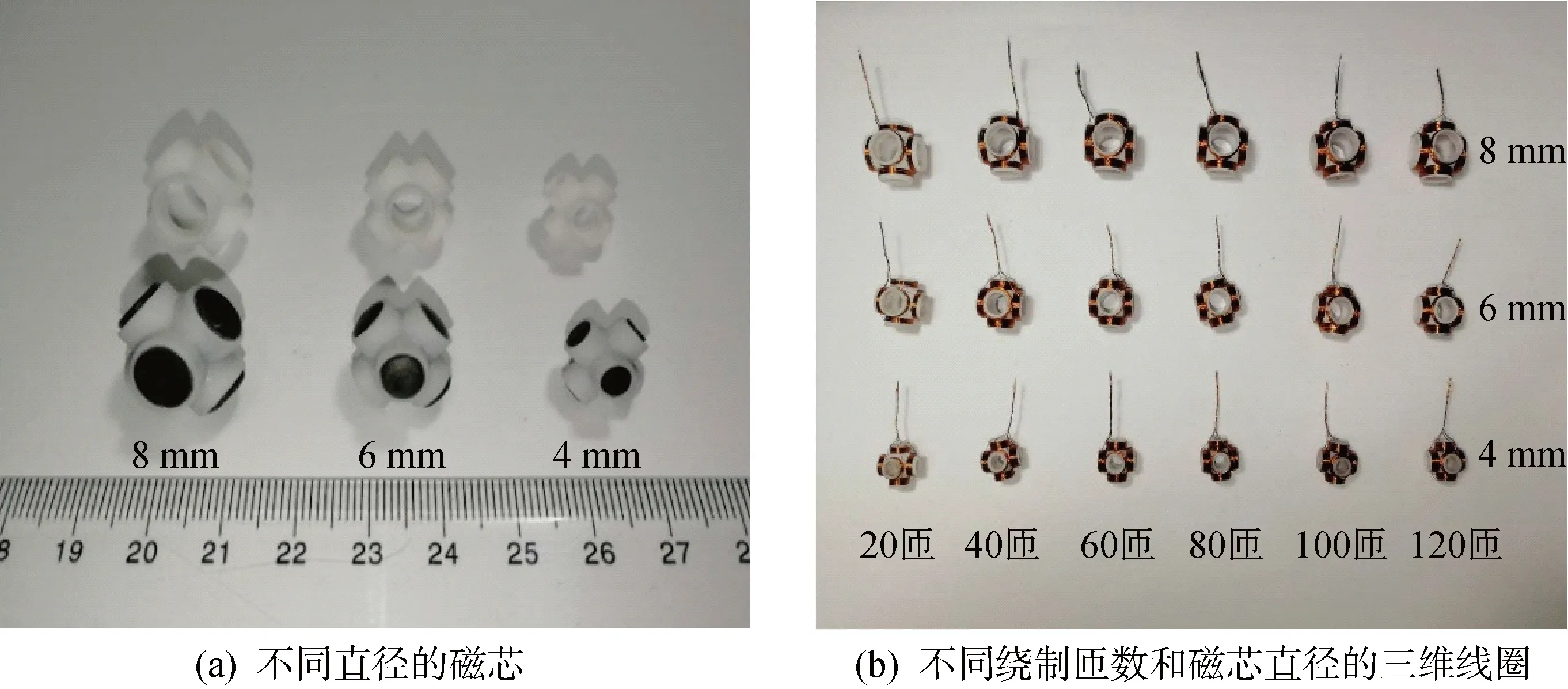
图5 线圈结构实物图
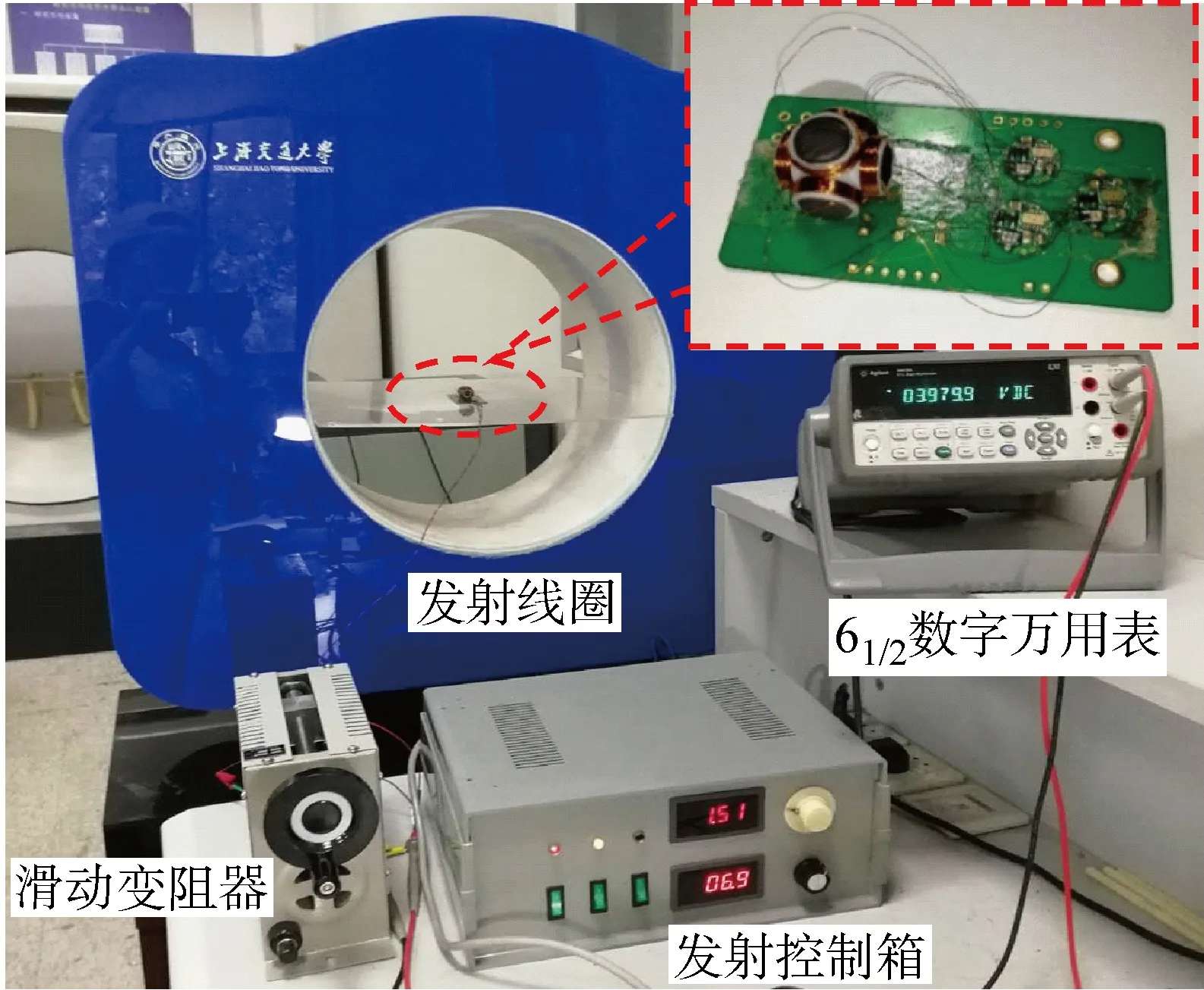
图6 测量接收线圈传输效率和传输功率的实验装置
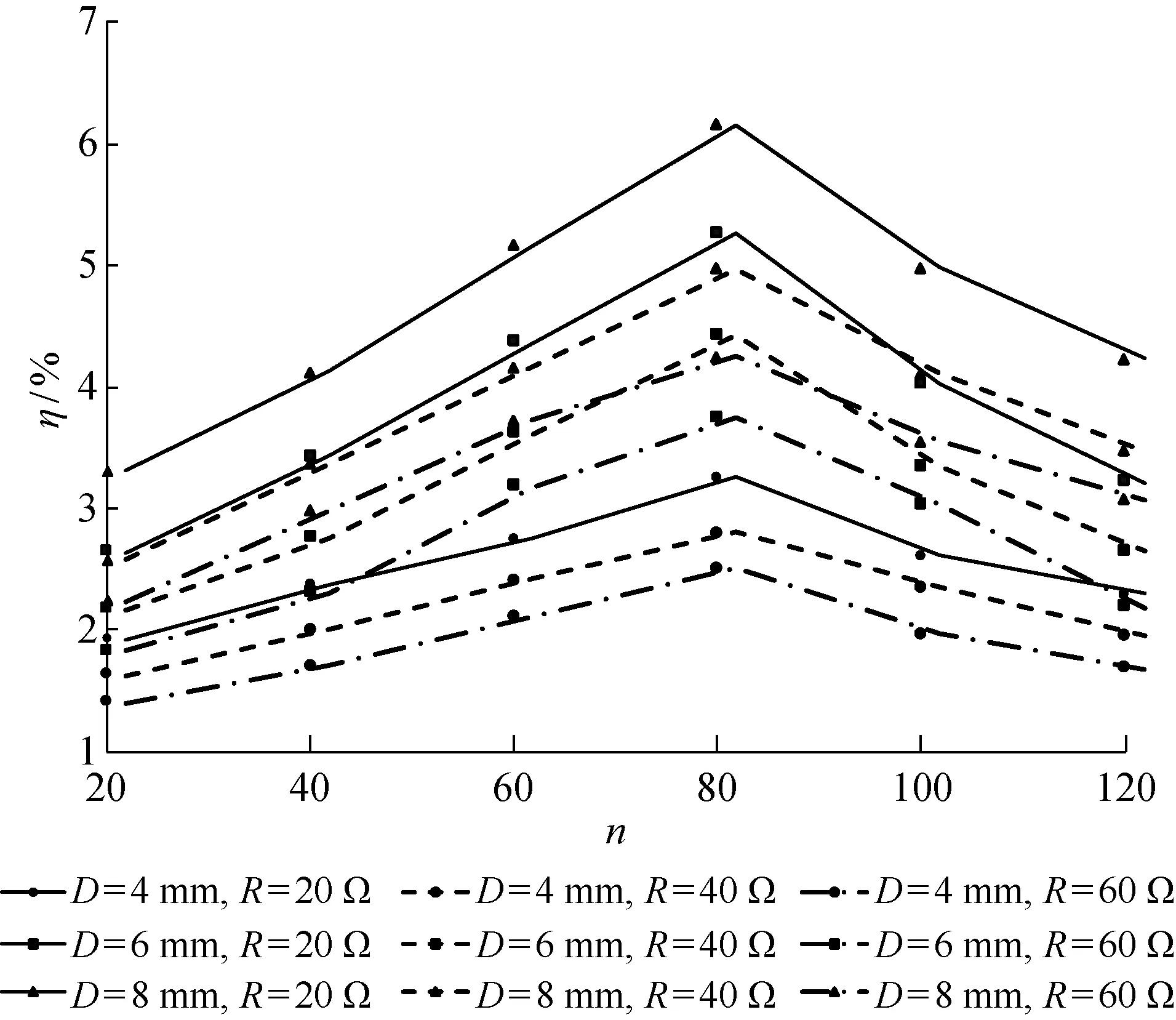
图7 不同接收线圈磁芯尺寸和负载电阻下的传输效率
由图7可知,在相同磁芯尺寸和负载电阻下,随着n的增加,传输效率先增大后减小,n为80时达到最大值.这是因为绕制匝数增加时,Rr成倍数增加,而M增加相对缓慢.根据式(13),当接收线圈绕阻较小时,随着绕阻增大,传输效率逐渐增大,反之.在相同绕制匝数和磁芯尺寸下,随着负载电阻的增加,传输效率逐渐减小,这是因为负载越大功率损耗越大.绕制匝数和负载电阻相同时,磁芯尺寸越大,传输效率越大,这是因为互感M增大.
由于机器人的正常工作功率为500 mW左右,因此本文用500 mW作为参数优化取舍基准,如图8所示.接收功率和传输效率的变化趋势基本相同,图中红色虚线为500 mW分界线,此线上方的数据点对应功率均大于500 mW.显然,磁芯直径为4 mm的接收线圈不能满足机器人的功率需求,而磁芯直径为6 mm和8 mm的接收线圈在绕制匝数为60~100以内基本能满足功率需求.

图8 以500 mW为基准不同接收线圈磁芯尺寸和负载电阻下的传输功率
综合图7与8可得,在接收线圈绕制匝数为80、负载电阻为20 Ω的情况下,磁芯直径为6 mm和8 mm的接收线圈分别对应最大的传输效率,即5.36%和6.16%,其最大传输功率分别为823 mW和936 mW.
3.2 接收线圈线径优化
考虑到机器人尺寸的问题,本文选择磁芯直径为6 mm的接收线圈,在线圈绕制匝数为80、负载电阻为20 Ω的情况下探究接收线圈线径d和发射线圈电压Vt对传输效率η和接收功率PL的影响.图9(a)为P和U的实验结果.由图可知,当发射线圈驱动电压一定时,随着线圈线径增大,P先增大后减小,这是互感M和接收线圈绕阻Rr共同作用的结果.在线径d=0.12 mm取得最大值,此时Rr与RL接近.当线径一定时,发射线圈电压越大,P越大,符合式(15)的变化规律.由于U只与Rr和RL有关,与发射线圈电压无关,因此U随着线径d的增大先增大后减小.
如图9(b)所示,PL的变化趋势与接收回路阻抗匹配时P的变化趋势基本相同,即随着线径的增加,传输功率先增大后减小.综合图9(a)和图9(b)可得,传输功率的实验值略小于其推算值,这是因为实验值会受到环境的干扰以及人为测量误差的影响.当线径为0.12 mm,发射线圈驱动电压8 V和10 V时,分别对应最大传输功率 1 020 mW和 1 216 mW,此时无线供能系统的传输效率为6.64%.因此,本文选择磁芯直径为6 mm、线圈线径为0.12 mm的线圈作为无线供能系统的接收线圈.
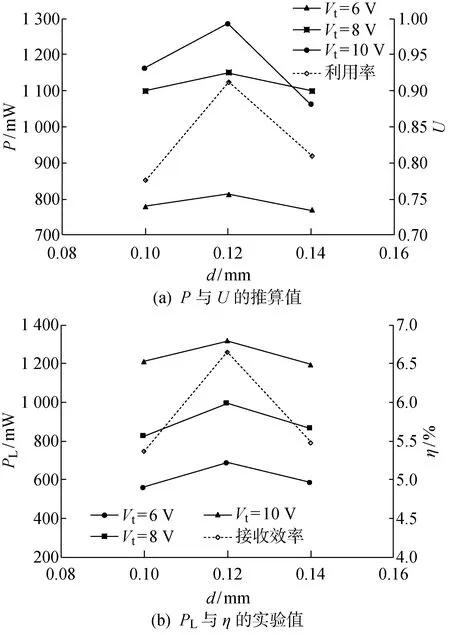
图9 P、U、PL及η与d的关系
3.3 接收线圈姿态稳定性
对磁芯直径为6 mm、线圈线径为0.12 mm的接收线圈进行姿态稳定性分析.用阻抗分析仪对线圈的交流阻抗进行测量,测试频率为线圈谐振频率218 kHz,如表2所示.各维线圈具有类似的绕阻,使得任意一维线圈作为输出时的感应电压变化平稳.由于负载电阻为20 Ω,且各维线圈的绕阻为12.30 Ω左右,负载电阻和单维线圈绕阻之比不满足J>4.15,因此三维接收线圈采取并联输出的方式.3个维度线圈产生感应电动势,其中感应电动势最大的线圈输出电压经整流、稳压电路后为负载供能.
搭建如图10所示的姿态稳定性实验测试平台,根据式(16),该平台可以改变接收线圈的姿态角,从而改变各个线圈在磁场方向的投影面积.双轴转台测试了实心三维接收线圈在不同姿态角下的输出功率,两个步进电机控制线圈旋转运动,使得线圈绕x、y轴旋转运动,步进角度为15°,发射线圈驱动电压为10 V,负载电阻为20 Ω.
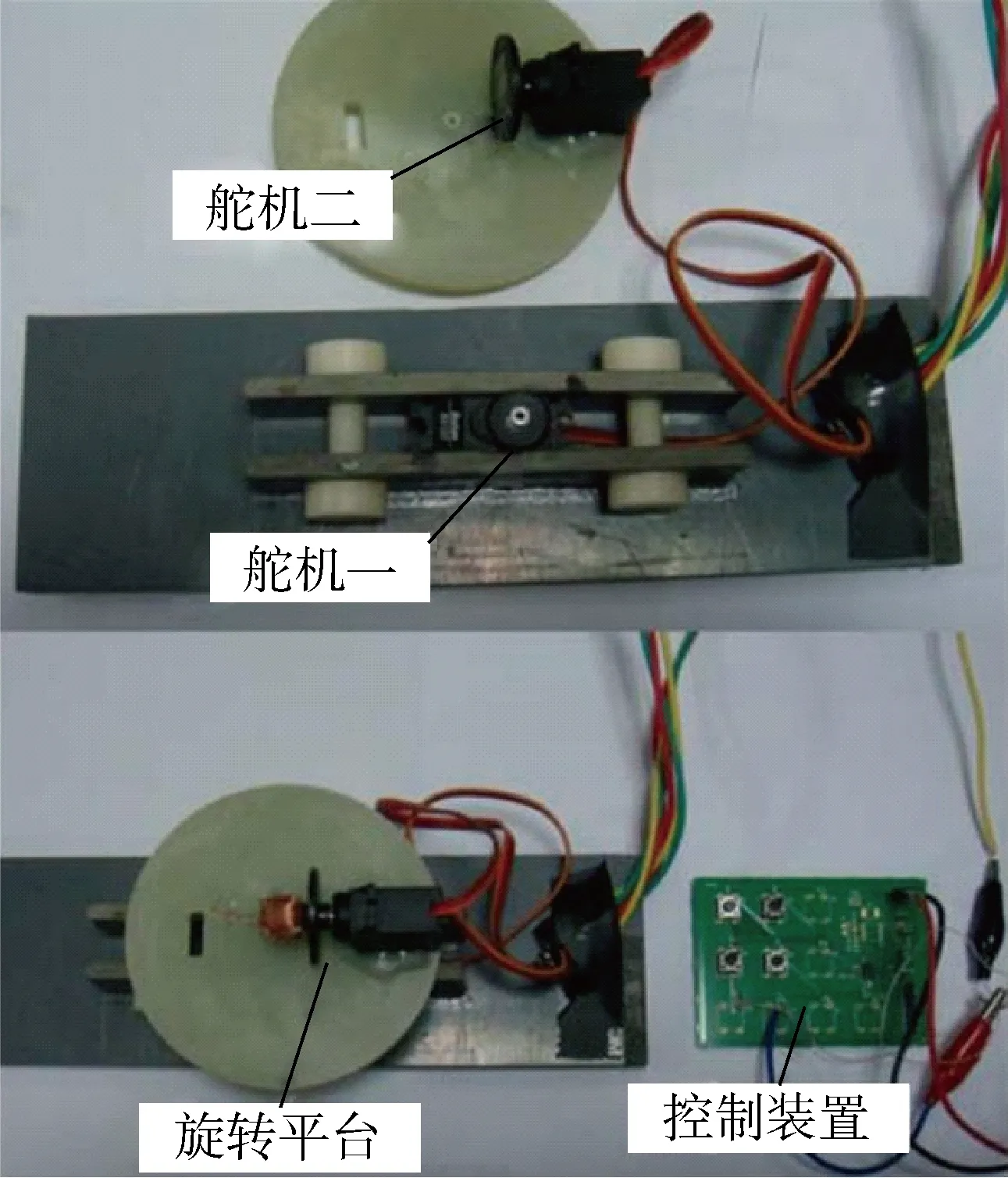
图10 用于三维接收线圈姿态调整的双轴转台
图11所示为测量结果.当α=90°,β=0°时,线圈a输出最大功率,为 1 245 mW;当α=β=0°时,线圈b输出最大功率,为 1 243 mW;当α=0°,β=90°时,线圈c输出最大功率,为1 248 mW.显然,3个维度线圈输出的最大功率几乎相同,这是由于设计的三维接收线圈各个维度绕制方式相同.如表2所示,线圈a、b、c的等效串联电阻几乎相同,则带载能力相同,输出的最大功率相同.当α=45°、β=45° 时,三维线圈输出最小功率,约为527 mW,该最小功率可使机器人基本维持正常工作.
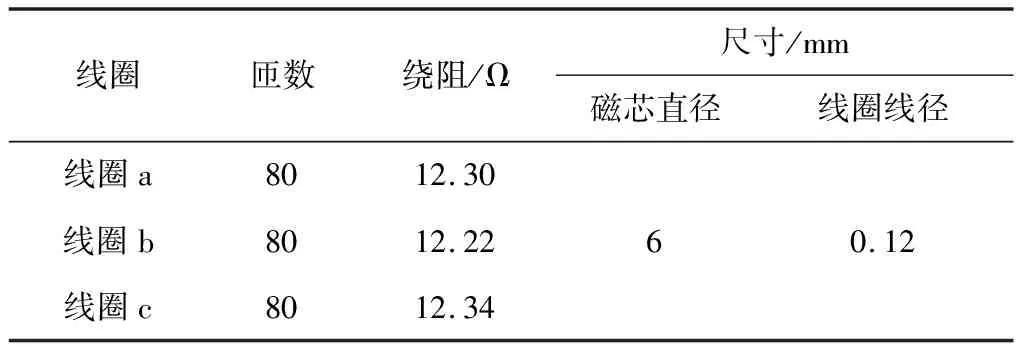
表2 三维接收线圈特性参数
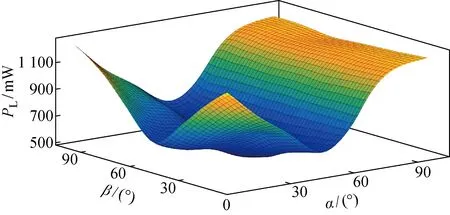
图11 三维接收线圈在不同姿态角下的接收功率
4 结语
针对肠道机器人供能问题设计了1种新型接收线圈结构,通过一系列对比实验,分析了接收线圈结构参数对传输功率和传输效率的影响,从而优化了磁芯直径、线圈匝数以及线圈线径.在发射线圈驱动电压和负载电阻一定的情况下,无线供能系统的传输功率和传输功率达到最大值.优化的接收线圈结构在任何姿态下均能满足肠道机器人的供能要求,最小输出功率约为527 mW,对应的传输效率为6.64%.
由于实验样本选择的结构参数有限,无法定量描述尺寸的最优解.针对现有成果,未来的研究将关注线圈占有体积与磁芯占有比率等参数,并考虑将实心磁芯替换成空心磁环以进一步优化接收线圈的结构.
