基于支持向量机辅助的四轴陀螺两级故障诊断方法
2020-12-15胡晓强仲训昱张霄力彭侠夫
胡晓强, 仲训昱, 张霄力, 彭侠夫, 何 荧
(厦门大学 航空航天学院,福建 厦门 361005)
组合导航系统担负着载体导航定位与姿态确定的职责,关系到载体的运行安全.为了提高导航系统的精度与可靠性,需对其进行故障诊断与修复[1].在联邦滤波结构的组合导航系统中,惯性导航系统(INS)作为公共参考系统,与其他辅助导航系统组成滤波子系统.研究人员常常假设INS的工作可靠性具有绝对保证,进而重点分析INS对其他子系统故障检测与识别(FDI)的辅助方法.吴有龙等[2]研究全球卫星导航系统(GNSS)与INS组合导航系统的故障检测算法,并用相关性度量方法对基于标准化残差的FDI算法进行改进.陈帅等[3]为GNSS/INS深组合导航系统的每个通道设计子滤波器状态检测函数,有效地遏制了故障通道对组合导航系统的影响.Call 等[4]提出一种多解分离的INS/GNSS组合导航系统完好性监测方法,用于卫星导航系统的故障检测.张闯等[5]研究GNSS/INS深组合导航系统的故障跟踪现象,提出一种基于层次滤波器结构的故障检测与系统重构新方法.
惯性导航系统常采用余度技术为其容错设计提供硬件基础[6].在不显著增加系统成本的前提下,四轴陀螺冗余配置方案的可靠性是无冗余系统的1.75倍[7].因此,四陀螺冗余惯性测量组件(RIMU)在民用设备和常规武器上具有重要的研究价值.针对冗余陀螺系统的故障诊断,常采用基于等价空间原理的最优奇偶向量法(OPT)和广义似然比法(GLT).但是在仅存在一个余度的情况下,等价空间法只能检测出故障,而不能对故障仪表进行正确隔离.Cheng等[8]研究了五轴RIMU双故障并发的容错问题,采用线性估计的方法辅助GLT算法对陀螺器件进行故障分离,对于较大的突变故障能够获得良好的诊断效果.
支持向量机(SVM)法是建立在结构风险最小化原理和VC维(Vapnik-Chervonenkis Dimension)概念基础上的一种小样本统计学习理论,其克服了神经网络结构难以确定、易陷于局部极小点以及需要大量训练样本的不足之处.SVM法在工业过程的故障诊断领域获得了广泛应用,例如滚动轴承、机床、感应电动机、高压交流电机与油浸式变压器等[9-10],除此之外,在组合导航系统中也有不少研究.柳敏等[11]针对传统χ2检验法无法准确地识别INS/GNSS故障子系统的不足,提出一种基于支持向量回归的故障诊断方法.Zhong等[12]结合最小二乘支持向量机与自主完好性监测法,实现了GNSS/INS的软故障检测.Xiao 等[13]设计了一种优化目标核函数,通过SVM法实现了故障信号的分离.李勇[14]针对平稳输出过程提出一种基于增量式模糊支持向量机的陀螺仪故障诊断系统,并通过增量学习算法实现样本采集及算法学习的同步进行.
本文针对四轴陀螺组件中故障器件识别问题,提出一种基于支持向量机的两级故障诊断方法.该方法通过残差广义似然比法实现四陀螺RIMU的故障判定;在检测出故障的情况下,根据陀螺输出数据采用小波包变换提取信号特征;以支持向量机训练的故障分类器判定信号类型来诊断故障器件,从而使得在四陀螺RIMU发生故障的情况下,能够准确地识别故障器件,进行有效的器件隔离和输出重构,保障惯性导航系统陀螺组件的精度和可靠性.
1 支持向量机原理及算法
给定n个数据对(φi,μi),i=1,2,…,n,其中:φi为样本数据向量;μi为对应的样本类别标签.SVM法将数据分类问题转化为如下的二次优化问题:
(1)
式中:w∈Rm为分类面的法向量,m为φi的维数;b为分类面的偏置量;ξi为松弛变量;C为惩罚函数.
引入Lagrange乘子法,将优化问题转化为对偶形式
(2)
式中:L为对偶问题的函数值;α为Lagrange算子,其下标与φ相对应.
对于新输入样本φ,SVM的决策函数可表示为
(3)
式中:ns为支持向量个数.
2 基于SVM辅助的故障诊断方法
对于四陀螺RIMU而言,传统的等价空间法只能检测出陀螺组件发生故障,却无法对故障器件进行准确定位.因此,本文提出一种基于支持向量机辅助的残差χ2故障诊断(RAS)法,在广义似然比法的基础上,利用支持向量机分类算法辅助进行陀螺组件的故障判定,实现四陀螺RIMU故障的准确识别,从而保证四陀螺RIMU的可靠性.
2.1 基于SVM辅助的故障检测与识别


图1 三正交一斜装配置
V=Hω+ε
(4)
(5)
式中:V∈R4为陀螺的量测数据;ω∈R3为待测的系统角速度;H为陀螺的安装矩阵;ε∈R4是均值为0、方差为σ2I4的Gaussian白噪声序列,σ为噪声标准差,I4∈R4×1表示元素数值为1的向量.
三正交一斜装陀螺组件的奇偶残差为
r=v1+v2+v3-v4/0.5774
(6)
式中:vi,i=1,2,3,4分别为3个正交陀螺与斜装陀螺的输出.对于时间窗口长度为k的残差序列Rk(t)=[r(t-k+1)…r(t-1)r(t)]T,构造如下故障检测函数:
(7)
式中:Pr为Rk的协方差阵;λk服从自由度为k的χ2分布,即λk~χ2(k).故障检测策略为,若λk>TD,则判定系统发生故障;若λk≤TD,则判定系统正常工作.其中,TD为预先测定的检测门限.
根据GLT法检测到故障后需要准确地识别故障器件,才能有效地进行故障器件的隔离和输出重构.采用基于小波包变换与支持向量机分类相结合的方法,辨识传感器输出信号的类型,辅助判别四陀螺RIMU的故障器件,以实现故障分离.
使用小波包变换提取信号vi的特征,具体步骤如下:
(1)确定信号窗口长度l;
(4)计算每个频段的小波包能量,作为信号vi的特征样本向量φ.
使用历史数据对SVM分类器进行训练,分别定义故障样本与正常样本的类别标签为1,-1,则可建立映射f:Rm→R,满足
μ=f(φ)
(8)
SVM分类器结构见图2,其中K(·)为核函数.

图2 SVM分类器结构
(9)
式中:TI为设定阈值,一般取一个近似为0的常数.
陀螺故障与载体的正常机动在信号成分上具有高度的相似性,使用SVM法难以区分正常机动和故障.因此,SVM故障诊断法需要结合GLT法的检测结果对四陀螺组件进行复合诊断.基于SVM的两级故障诊断流程包括奇偶残差计算、残差χ2故障检测、信号特征提取、支持向量故障分类、系统隔离与重构,其流程如图3所示.

图3 基于SVM辅助的故障诊断流程图
其中,SVM故障检测与重构策略为
(1)将故障计数器清零,即counter=0.
(2)选取未经检测陀螺器件的输出.
(3)用小波包提取输出信号的φ作为SVM的样本.
(4)用SVM计算φ对应的输出μ.
(5)根据μ判定信号类型,若μ>TI,那么counter+1.
(6)判断是否存在未检测的陀螺器件,若存在,转(2);若不存在,转(7).
(7)根据故障计数器选择操作,若counter=1,则对四轴RIMU的输出进行重构.
2.2 四陀螺RIMU故障隔离与重构方案设计
当四轴RIMU系统正常工作时,使用三正交轴陀螺数据作为整个陀螺组件的输出,保证ω具有最小的不确定度.在四轴RIMU检测出故障后,为保障导航系统的定位精度,需要根据故障辨识结果实现四轴RIMU的故障修复:若斜装轴陀螺发生故障,将其从RIMU组件中剔除,保持陀螺组件的输出不变;若某一正交轴陀螺发生故障,将其从RIMU组件中剔除,利用其余器件的输出重构故障陀螺数据,与正常的正交轴陀螺输出作为ω的测量值.
根据上述设计的故障隔离和重构方案进行诊断后的处理,在损失一定精度的条件下,可以确保四轴RIMU输出不受故障影响,实现陀螺组件一次故障正常工作的容错能力.
3 模拟分析
为了验证所提算法的有效性,建立惯性/卫星松组合导航系统数字模拟平台.模拟中,总飞行时间为436 s,固定翼飞行器的初始姿态为[0 0 0]T,初始位置为东经58.91°,北纬50.25°,高度380 m.根据全球定位系统(GPS)提供的位置信息,水平位置量测误差设定为2 m,高度量测误差设定为5 m;RIMU中的陀螺角度随机游走为0.5°/h1/2,加表的速度随机游走为100 μg/Hz1/2.载体飞行轨迹为动态轨迹,包括加速、爬升、协调转弯等机动动作.采样周期为0.01 s.GLT采用窗口长度l′=6的固定历元检验(FSS)算法,检测门限为TD=39.81;小波包变换数据窗口长度为l=100;选取线性SVM分类器作为辅助算法,检测门限为TI=0.1.
3.1 算法性能实验分析
选取s轴陀螺平稳过程的输出作为SVM分类器训练的数据,分别加入5σ,6σ偏置故障与3σ/s,4σ/s漂移故障.使用小波包变换提取信号特征,生成400个正常样本与288个故障样本.设置两类样本标签——正常、故障.重复进行分类器训练,每次训练随机选取80%的样本作为训练样本,其余作为测试样本,直至分类器对于测试样本的错分数为0.将检测结果与文献[8]中的线性估计辅助(LSG)算法进行对比.为了分析对比两种辅助算法的性能差异,LSG算法采用相同的FSS算法作为整个RIMU系统的故障检测算法.
场景1(平稳运行)选取四轴陀螺组件在仿真时间t=22~28 s内的平稳输出作为算法性能验证数据,从t=25 s开始分别在四轴上加入不同故障.
场景2(机动运行)选取四轴陀螺组件在t=28~34 s内的输出作为算法性能验证数据,其中t=28~30 s为平稳输出,t=30~34 s为4 s的爬升过程,从t=31 s开始分别在四轴上加入不同故障.


表1 z轴陀螺的故障检测结果

图4 RAS法对x轴故障的故障检测时间
3.2 INS/GPS容错导航模拟验证
在不同时刻分别在四轴RIMU中注入不同故障,故障参数设置如表2所示.
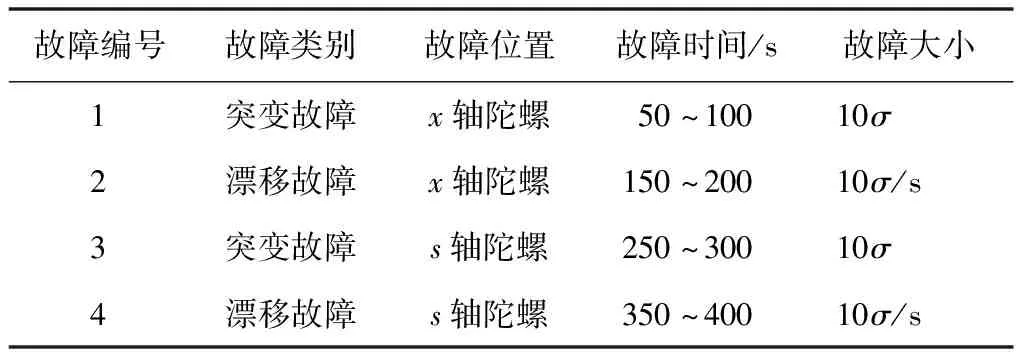
表2 注入的故障信息
模拟试验分为3组:无故障情况、故障无容错情况与RAS故障容错情况.将3种情况分别与载体的真实位置进行对比,实验结果如图5和6所示.其中:e为位置误差;eN为北向位置误差;eE为东向位置误差;eH为高度位置误差;|e| 为位置误差向量的模.

图5 3种情况下INS/GPS组合的导航位置误差

图6 故障容错情况与无故障情况导航误差对比
由图5和6可知,若不能对四轴RIMU故障进行准确地识别与处理,将会引入故障信息,影响当前甚至后续的导航结果.所提出的RAS算法,无论面对突变故障还是漂移故障,均能对故障器件进行准确定位,并实现有效的隔离与处理,保证在任何一个陀螺发生故障的情况下组合导航系统的正常运行,从而验证了RAS算法的可行性和有效性.
4 结语
本文提出一种基于支持向量机辅助的四轴RIMU两级故障诊断方法,该方法针对传统奇偶检验法无法识别故障器件的问题,建立SVM故障分类模型,对陀螺运行状态进行评估.结合广义似然比法,在四轴RIMU发生故障时,利用状态评估辅助对陀螺组件的故障进行判别,实现故障器件的定位和有效的隔离与处理,并进行了仿真验证.仿真结果表明,RAS法能够快速准确地识别故障器件,从而保证了惯性导航系统陀螺组件在最小冗余配置条件下的精度和可靠性.
