双发四旋翼无人机传动系统设计与分析
2020-12-11聂广华冯跃军
聂广华,徐 珂,冯跃军,袁 康
(1.河南工学院 智能工程学院,河南 新乡 453003;2.河南工学院 工程技术教育中心,河南 新乡 453003;3.河南风雷航空电子科技有限公司,河南 新乡 453000;4.河南工学院 机械工程学院,河南 新乡 453003)
大载重、长航时多旋翼无人机有着广泛的应用前景[1]。从使用情况看,多旋翼无人机还存在一些问题:电动方案由于受制于电池的能量密度,在挂载任务下续航时间短,持续飞行需准备多个备用电池,更换电池将增加繁琐危险起降的次数,也致使单次飞行工作效率低下[2];油电混合方案比较稳妥,但由于需携带油、电两套动力系统,致使其重量增加,整机性能的提升受到限制[3];油动方案目前多由一台发动机提供动力或每个旋翼使用一台发动机驱动,由于发动机相对于电动机其稳定性较差,如果发动机因故障停车,将会造成无人机坠毁。
本文设计的无人机是一款新型的双发四旋翼无人机,采用两台发动机作为动力源,四个直升机变距旋翼带动无人机完成垂直起降等各种飞行任务,具有载重大、航时长、安全系数高、使用范围广等特点。
1 传动方案设计
设计的双发四旋翼无人机传动方案如图1所示。航空发动机(1、20)通过同步带轮(2、21)、同步带(3、22)与同步带轮(4、23)带动变速箱的输入轴(6、24)转动,经直齿圆柱齿轮(7、12、26)一级减速后,由变速箱输出轴(13)通过联轴器(14、28)驱动传动轴(15、29)旋转,再通过两组1∶1锥齿轮副(10、16、18、31、33、35)与传动轴(11、17、32、34)带动四个变距旋翼转动,实现各旋翼的速度控制与姿态调整。两台发动机转速不相同时,由单向轴承(5、8、25、27)保证同步输入,旋翼螺距的改变由变距器实现。
相对于现有多旋翼无人机,该传动系统方案能实现以下性能:
(1)载重大幅度提高。与电动多旋翼无人机相比,由于采用了内燃机和更大可变距螺旋桨,其载重大幅度提高。
(2)机动性能明显改善。工作时旋翼转速固定,通过改变螺旋桨螺距的方式能实现升力的快速改变,而且可以实现传统多旋翼飞行器无法完成的倒飞任务。
(3)航时大幅提升。满载6L油时可飞行2—3个小时,与电动多旋翼无人机相比,续航时间大幅提升。
(4)可靠性提高。避免单台发动机驱动时因发动机故障造成的坠机事故。
(5)稳定性增强。电动多旋翼无人机下落时,旋翼转速过低,升力改变不够迅速,容易坠机。变距旋翼方式可以快速实现升力变化,稳定性明显增强。
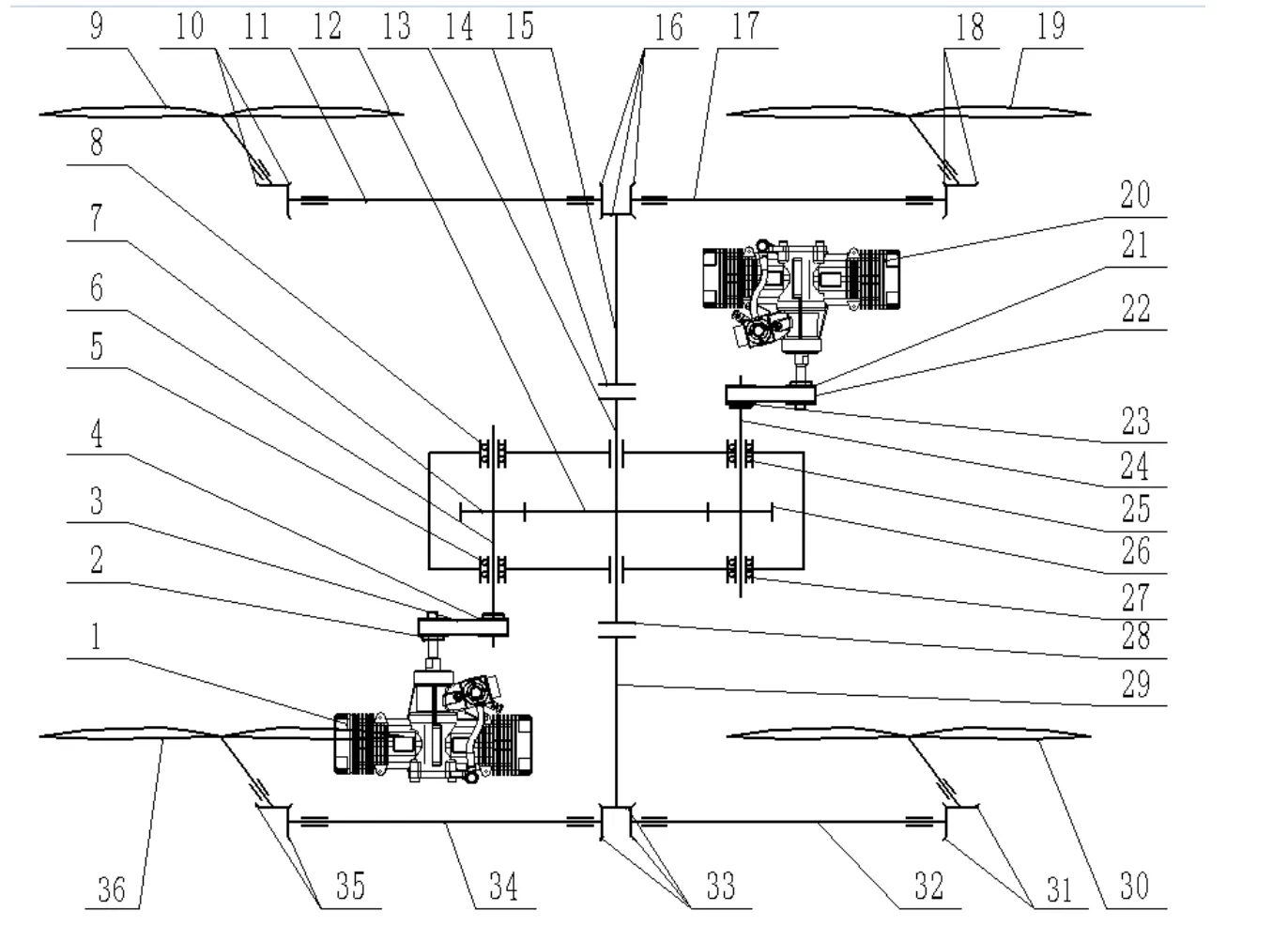
图1 双发四旋翼无人机传动方案
2 传动系统及主要参数确定
传动系统设计主要包括:发动机与旋翼的选型,主要零部件选型或结构的确定,通过动力学计算确定动力参数。
2.1 主要动力部件选型
变距旋翼结构中发动机参数与旋翼参数的选择及匹配情况,很大程度上影响着无人机动力性能。
2.1.1 发动机选型
根据预设的120kg起飞重量,经过对单轴直升机与油动多旋翼无人机所使用发动机的情况进行对比,选定功率高、稳定可靠、综合性能好的3W-157XiB2 CS型号航空发动机,其主要技术参数如表1所示。

表1 3W-157XiB2 CS航空发动机主要技术参数
2.1.2 旋翼选择
双发四旋翼无人机为变螺距旋翼结构,工作时转速一定,通过改变旋翼螺距实现与发动机功率的匹配,获得合适的拉力,带动无人机垂直起降与前后运动。设定传动系统传动比为1∶3,对旋翼进行设计,发动机正常工作转速为最高转速的80%,即6000r/min左右,得到旋翼转速N=2000r/min。
计算旋翼直径时,翼载荷σ与旋翼径长R、负载M有关,速度V则与转速N、旋翼径长R有关[4]。

因a=340m/s,本文设计σ=10kg/m2,M=30kg,取旋翼径长R=1m,由式(1)—(3)得V=209.3m/s,马赫数Ma为0.616,小于0.7,属于亚音速范围。展弦比的大小对飞机飞行性能有明显的影响,一般变螺距旋翼取较大值,取展弦比为10,得弦长为0.1 m。选取径长1m、弦长0.1m的旋翼。
2.2 传动系统结构确定与动力参数计算
2.2.1 传动系统结构确定
设计的传动系统主要由变速箱、传动轴、锥齿轮副与变距旋翼组成。为保证工作时旋翼转速稳定可靠,要求传动系统具有较高的精度、实时响应及良好的稳定性。同时为保证预设的传动系统动力性能,要求在保证传动系统刚度和强度下,其结构重量和转动惯量应尽量减小。作为一种全新的双发四旋翼无人机,为减少发动机振动对传动系统的影响,在发动机与减速器间用同步带传动;变距旋翼无人机工作时为定速飞行,设定变速箱输入和输出转速分别为6000r/min和2000r/min,变速箱的传动比为1∶3,根据传递的扭矩,确定齿轮模数与结构;变速箱输出轴通过传动轴与两组1∶1锥齿轮副,经两次变向,带动旋翼旋转。双发四旋翼无人机传动系统结构如图2所示。

图2 双发四旋翼无人机传动系统结构
2.2.2 动力参数计算
对双发四旋翼无人机传动系统进行动力参数计算,传动系统主要包括变速箱输入输出轴及齿轮传动、联轴器和锥齿轮副。
(1)变速箱输入轴许用弯曲应力为70MPa,输入扭矩为22.30N∙m。
(2)变速箱齿轮传动齿面接触许用应力为570MPa。
(3)变速箱输出轴许用弯曲应力为60MPa,输入扭矩为178.03N∙m。
(4)联轴器选择可拆装型梅花联轴器MJC-65。其轴套材质为铝合金,额定扭矩160N∙m,最大扭矩320N∙m。
(5)锥齿轮副齿面接触许用应力为572MPa。
3 结构模型的构建
传动系统结构确定后,无人机三维结构模型设计主要包括主机身与主要支撑件的确定。其结构需保证足够的强度、刚度和稳定性,同时为提高无人机载重、增加续航时间,应尽可能地减轻其结构重量。
(1)主机身。机体整体布局采用具有良好飞行稳定性和机动性的X构型。主机身设计在双发四旋翼无人机机体中央,由矩形截面管构造龙骨,两块“十字”支撑板形成双层框架结构。为了降低结构重量,主机身全部采用轻质铝合金,在非主受力部位开有减重孔,既减轻重量,又可提高可靠性。
(2)发动机布局与连接。两台发动机采用全对称排布,通过减震垫用螺栓与主机身连接,并在安装部位与发动机间增加缓冲材料。缓冲材料在减震的同时,还能起到一定的消音作用。
(3)旋翼支撑臂。由于发动机力矩较大,为保证旋翼支撑稳定可靠,旋翼支撑臂采用轻质铝合金。旋翼支撑臂与主机身连接处增设法兰与加固装置,并在旋翼臂与主机身间增加斜支撑,提高支撑强度与刚性。
双发四旋翼无人机传动系统三维结构模型如图3所示。

图3 双发四旋翼无人机三维结构模型
4 基于Unigraphics NX的主要零部件有限元分析
4.1 基于Unigraphics NX 进行有限元分析的主要步骤
(1)建立模型。利用软件三维建模模块,构建零部件的三维结构模型。
(2)网格划分。根据UG高级仿真求解器的离散化求解原理,对构建的三维模型进行网格划分。
(3)指派材料。对零件指派材料,并设定材料属性。对于系统材料库里没有的材料需新建材料并输入材料属性参数。
(4)施加约束及载荷。根据零件的受力条件,建立力学模型,在相应部位施加载荷或者约束。对于齿轮接触特性的分析,需要设置齿轮啮合相互接触面、接触类型及边界条件[5]。
(5)仿真求解。完成网格划分、设定材料与施加约束及载荷后,系统开始进行有限元分析计算。
(6)后处理。有限元分析后得到应力云图、位移云图等结果。
4.2 主要传动零部件有限元分析
根据图4、图5所示的变速器与锥齿轮副变向机构三维模型,对主要零部件进行有限元分析,将分析结果与动力参数进行对比,进一步确定其结构的安全性,并为结构的优化提供必要的数据支撑。

图4 变速器三维模型

图5 锥齿轮副变向机构三维模型
(1)变速箱输入轴。变速箱输入轴应力云图和位移云图如图6、图7所示,其所受最大应力为53.26MPa,最大位移为0.0221mm,满足设计要求。
(2)变速箱齿轮传动。对变速箱齿轮啮合进行有限元分析得到应力云图和位移云图如图8、图9所示,其所受最大应力为188.36MPa,最大位移为0.0121mm,满足设计要求。
(3)变速箱输出轴。变速箱输出轴应力云图和位移云图如图10、图11所示,其所受最大应力为50.90MPa,最大位移0.0102mm,满足设计要求。
(4)联轴器。梅花联轴器受力相对简单,在理论状态下只受扭矩作用。当一个半联轴器受力时,键齿面沿扭矩方向给前面的垫块齿面压力,而对后面的垫块齿面没有压力[6]。

图6 变速箱输入轴应力云图
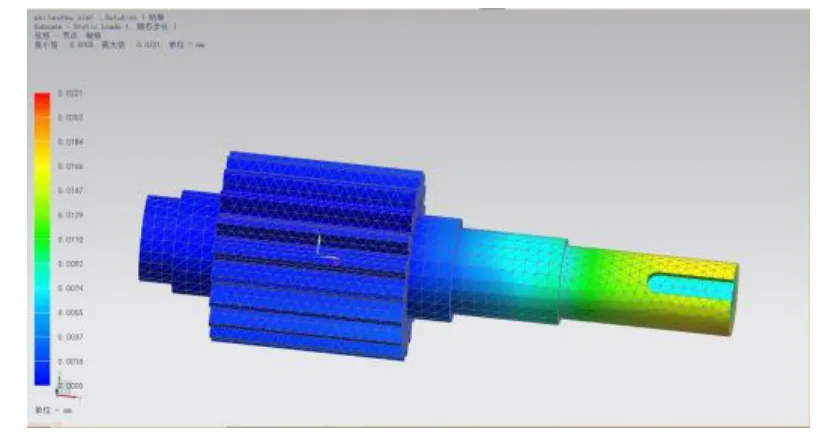
图7 变速箱输入轴位移云图

图8 变速箱齿轮传动应力云图
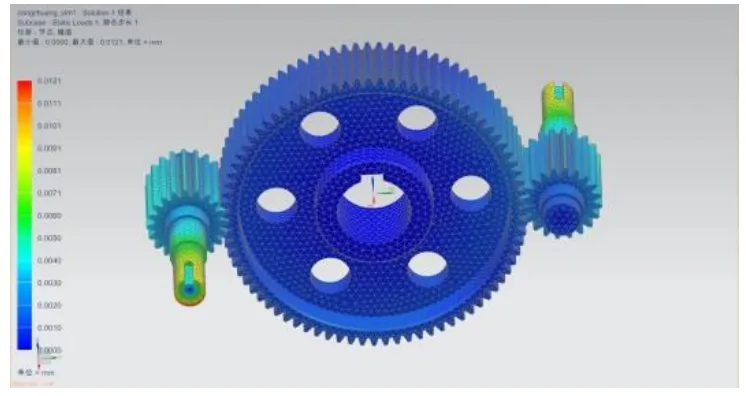
图9 变速箱齿轮传动位移云图

图10 变速箱输出轴应力云图

图11 变速箱输出轴位移云图
对一个半联轴器进行有限元分析,结果如图12、图13所示,其最大应力为50.60MPa,最大位移为0.00686mm,满足设计要求。

图12 联轴器轴套应力云图

图13 联轴器轴套位移云图
对联轴器垫块进行有限元分析时,将传递的扭矩转化为受力齿齿面所受的力,再进行求解,结果如图14、图15所示。其最大应力为8.790Mpa,最大位移为0.0722mm,满足设计要求。
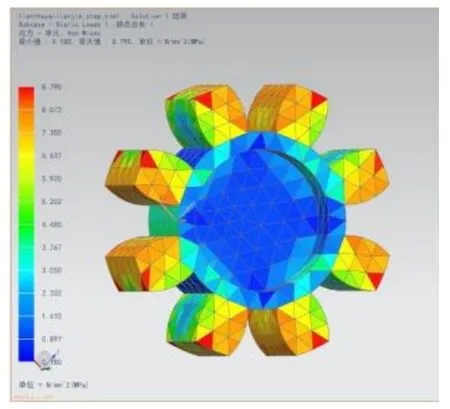
图14 联轴器垫块应力云图
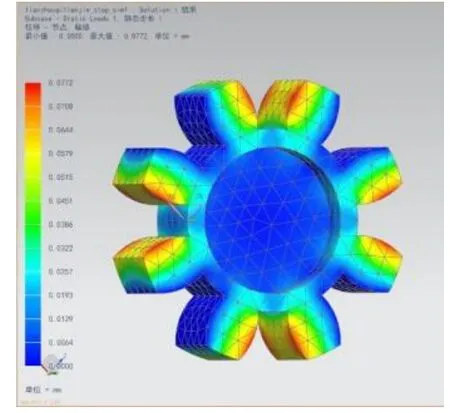
图15 联轴器垫块位移云图
(5)锥齿轮副。锥齿轮副应力云图和位移云图如图16、图17所示,其最大应力为95.7MPa,最大位移为0.0147mm,满足设计要求。
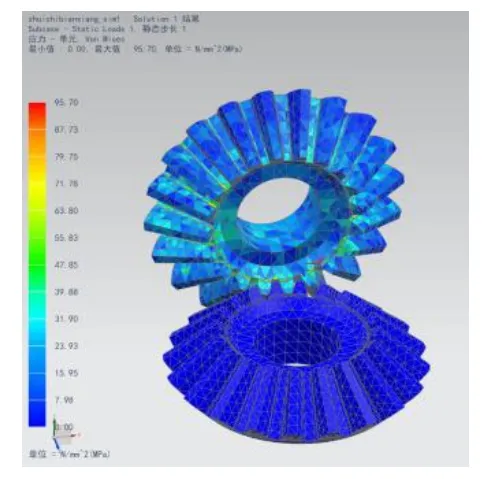
图16 锥齿轮副应力云图

图17 锥齿轮副位移云图
5 结论
(1)设计完成的双发四旋翼无人机传动方案通过双发动机集中同步驱动,较好弥补了当前油动多旋翼无人机的缺点,提升了油动多旋翼无人机的整体性能。
(2)对传动系统发动机、旋翼等主要零部件进行选型、参数计算与结构设计,完成传动系统三维结构建模,通过对主要零件的有限元分析,保证了设计的传动系统安全可靠。
(3)主要对双发四旋翼无人机传动系统进行了设计与分析,后续工作中将考虑利用无人机动力学模型对整机进行运动及动力学分析,对其结构进一步优化。
