基于动态无线充电的草莓温室大棚自动输送车系统设计
2020-12-11迟明路任瑞华王元利钱晓艳
迟明路,任瑞华,王元利,钱晓艳
(1.河南工学院 智能工程学院,河南 新乡 453003;2.河南工学院 经济学院,河南 新乡 453003)
0 引言
目前,温室大棚内草莓采摘后在棚内仍采用人工运输的方式,这种方式劳动强度大、效率低,且草莓极易受损[1]。针对上述问题,国内外都有业者使用轨道车进行运输。这虽然改善了草莓的运输环境[2,3],但轨道的铺装价格较高,且受温室大棚行垄空间的限制,轨道安装较为困难。
本文设计了一种基于动态无线充电的草莓温室大棚自动输送车系统,采用MSP430F5529LP单片机作为主控核心,以灰度传感器对黑线进行循迹,利用超级电容作为储能元件为输送车进行动态充电[4]。超级电容具有充电迅速、寿命长、反复充放电能力强等优点,被认为是新一代的电池技术。动态无线充电技术的发展为草莓温室大棚自动化无人运输奠定了基础[5-13]。
1 模块整体设计和布局
本文采用TI公司生产的MSP430F5529LP单片机作为系统主控处理器,这是一款基于闪存的产品,工作电压为1.8—3.6 V时,性能可达25 MIPS,启动时为12 MIPS,内部有优化功耗电源管理模块和稳压模块,并具备较大的存储容量。利用MSP430F5529LP单片机自身的优点,配合灰度传感器,可实现循迹黑线轨道(以下简称轨道)行走,输送车沿轨道运行时不偏离循迹路线,并使用超级电容模块为主控系统进行实时供电。储能元件使用超级电容模块,参数为5.5 V/10 F,为提高其电压,采用了超级电容并联的方式,并使用TB6612FNG小型电机驱动板对驱动电机进行速度控制,TB6612FNG的性能优于常规使用的L298N芯片,可大大减少输送车的电能消耗。
动态无线充电系统由散热底板、嵌于路基中的亚克力板、无线能量发射装置、供电箱、延时继电器和轨道组成,在散热底板与亚克力板之间装有多个无线能量发射装置,无线能量发射装置由多匝能够与接收线圈耦合的发射线圈构成,供电箱与发射线圈连接,轨道安装于亚克力板内侧,供电箱与延时继电器连接,由延时继电器控制供电箱与发射线圈之间的电路通断。无线能量接收装置安装于车身底部,内部装有TB6612FNG驱动板,超级电容模块依次与整流模块、稳压模块、继电器控制模块连接。
本系统采用3个灰度传感器进行循迹行走,利用程序控制左右两轮的相对运动状态,使输送车能够在运输过程中保持速度稳定并进行匀速转弯,保证了草莓运输过程中的安全性与稳定性。输送车的车身采用亚克力板制成,两个前驱轮和一个全向万向轮构成底盘轮系。其中,两个主动轮均安装相同的电机作为驱动动力轮,万向轮作为从动轮安装在底盘后部。由于草莓输送车的主要任务是装载草莓,所以在综合考虑所需控制器件和运行线路后,选用尺寸为205mm×101mm×2.7mm的绝缘亚克力板作为车底盘,以保证承载重量和控制电路的可靠运行。草莓输送车整体结构如图1所示。
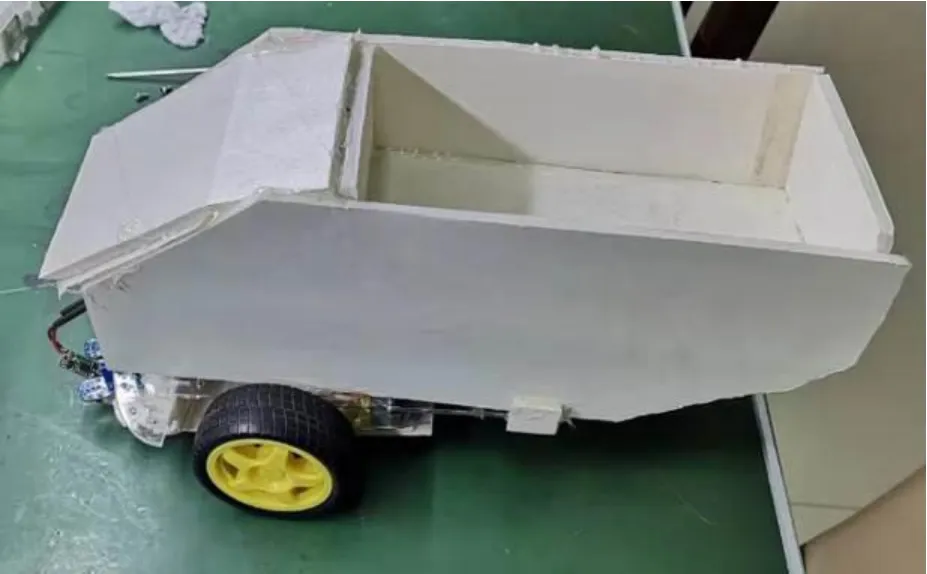
图1 输送车整体结构
本方案的整体设计实现了自动输送车的动态无线充电,满足输送车的运输要求。图2为基于动态无线充电的草莓温室大棚自动输送车的整体结构框图。

图2 系统整体方案结构框图
2 硬件电路设计
2.1 MSP430F5529LP单片机
MSP430F5529LP单片机采用高效16位RISC体系结构[14],所有指令操作包含7种源操作数的寻址模式和4种目的操作数的寻址模式。具有8个8位的I/O端口,包括P1—P8,其中,P8为3个I/O口线。系统使用的MSP430F5529LP单片机如图3所示。
图3 MSP430F5529LP单片机
2.2 无线能量发射模块与接收模块
设计无线发射模块和无线接收模块时,重点考虑线圈的充电效率[15]。相比于其他单片机,MSP430F5529LP单片机具有能耗低、充电效率高的特点。本系统中,无线线圈形状为圆形,线圈大小适中且体积轻薄,有利于输送车进行定时充电。采用12V的直流稳压电源为发射模块供电,经逆变电路转换成交流电,传输至发射线圈,电流在线圈内形成电磁场,最终通过电磁感应的方式为超级电容充电,完成充电储能过程。图4为系统充电方案示意图。
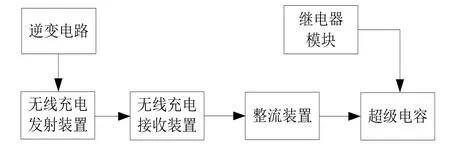
图4 充电方案示意图
为了提高输送车的行走时间,使用漆包线紧密缠绕制成无线接收线圈,经测试发现可以有效提高输送车的充电效率,保证输送车行走时间更长。图5所示为无线能量接收线圈的结构。

图5 无线能量接收线圈
无线能量传输的发射和接收模块电路如图6、图7所示。
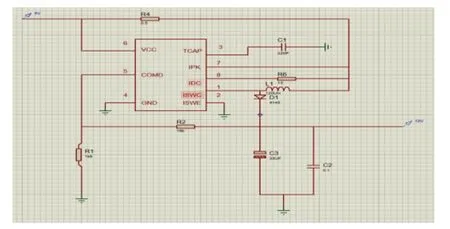
图6 无线发射模块电路图

图7 无线接收模块电路图
2.3 电机驱动模块
相比于常规使用的L298N芯片,TB6612FNG[16]具有集成化程度高、体积小、功能强和效率高的优点,如图8所示。TB6612FNG的主要引脚功能为:AINI/AIN2、BIN1/BIN2、PWMA/PWMB为控制信号输入端;AO1/AO2、BO1/BO2为2路电机控制输出端;STBY为正常工作/待机状态控制引脚;VM(3—13.5 V)和VCC(2.7—5.5 V)分别为电机驱动电压输入和逻辑电平输入端。TB6612FNG可同时驱动两个电机,分别控制两个电机的I/O口和STBY口与单片机的I/O口连接,通过AIN1、AIN2、BIN1和BIN2来控制电机正反转。

图8 TB6612FNG电机驱动模块
TB6612FNG模块用于控制输送车的前进、后退、转弯和停车等运动,主要原理是基于PWM波对转速的控制,调速控制过程如图9所示。

图9 电机驱动模块调速过程
具体调速方法是根据控制表中的电机运动状态为AINI/AIN2、BIN1/BIN2提供相应的高低电平,进而控制电机转动方向,表1为TB6612FNG驱动模块控制逻辑表。需要注意的是,在逻辑表中,当AINI/AIN2、BIN1/BIN2、PWMA/PWMB均为1时,电机的控制输出端发出的逻辑指令表示刹车状态。

表1 TB6612FNG驱动模块控制逻辑表
2.4 继电器控制模块
继电器控制模块选用5 V常开模式,触发可靠,稳定性高。在输送车底部加装无线能量接收线圈,为继电器独立供电。无线接收线圈通过电磁感应产生电流,为继电器模块提供标准工作电压。图10所示为继电器供电线圈。
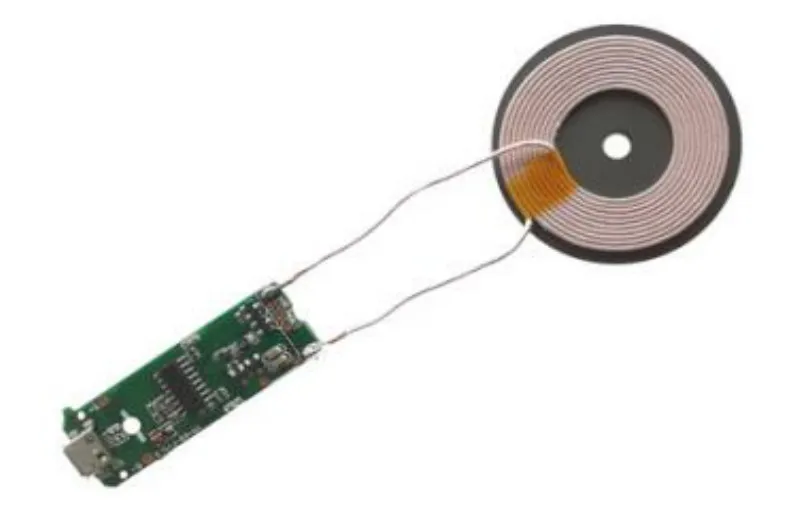
图10 继电器供电线圈
为了使输送车能够自启动,将继电器的常开端串联到超级电容与电机的支路,继电器工作时,处于常开状态,车轮驱动电机不通电,此时系统为超级电容充电;继电器断电时,恢复常闭状态,此时超级电容模块放电,输送车开始启动,图11和图12分别为继电器模块的控制线路图与实际图。

图11 继电器模块控制图

图12 继电器模块
2.5 循迹模块
循迹模块选用3个灰度传感器,输出类型为数字高低电平式,优点是响应速度快、稳定性高。采用高亮白色聚光LED,接收时对不同反射光的强弱进行对比处理,仅需对比白光反射的强弱即可,差值越大,分辨度越好,比普通红外传感器抗干扰能力强。选用3个灰度传感器,可以精准判断出所循迹黑线轨道的位置并能减少外界红外线的干扰,图13所示为循迹模块。

图13 循迹模块
灰度传感器识别出黑色轨迹后,返回给MSP430F5529LP单片机1和0两个电平信号,单片机处理之后经驱动电路控制输送车行走,如图14所示。

图14 循迹模块功能框图
2.6 超级电容模块
输送车使用的超级电容模块由多个超级电容组合而成,超级电容储能模块的储能为物理过程,其功率性要优于锂电池,可以使用大电流快速充放电,充放电次数能达到50万次以上,具有使用寿命长的优点。图15所示为超级电容模块。

图15 超级电容模块
3 软件设计
系统软件主要完成对系统的初始化和对硬件的启动、检测等功能,其中运动控制程序的主要任务是完成更为精准的运动控制,使运动随着工作过程和任务的不同而进行改变。整个系统程序可分为四部分,分别为:主程序、初始化程序、延时子程序和循迹检测程序。图16为系统程序设计流程图。

图16 程序设计流程图
4 测试及分析
为了验证上述分析,在2 min的时间内测量了输送车的行走距离,并测量了动态无线充电电压。
4.1 输送车运动距离测试及分析
由表2可以看出,随着充电时间的增加,输送车运动距离也逐渐增加。

表2 运动距离测试
4.2 灰度传感器安装距离测试及分析
对3个灰度传感器的灵敏度进行测试,以寻找合适的安装高度和距离,采用多次试验综合取值分析的方法,每组试验进行20次,测量数据如表3所示。最终得到灰度传感器安装距离为:传感器距离地面10 mm,3个传感器相互距离为20 mm。
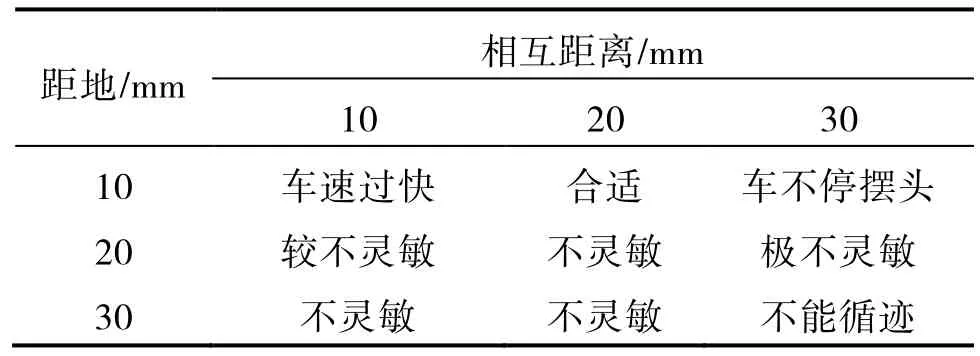
表3 灰度传感器灵敏度测试
4.3 充电电压测试及分析
选用12 V直流电源为动态无线充电系统充电,首先,对输送车连续充电1 min;然后,每测一次时间增加30 s,使用秒表进行计时;最后,统计数据并绘制电容充电电压曲线如图17所示。可以看到,随着充电时间的增加,电容充电电压也逐渐变大。
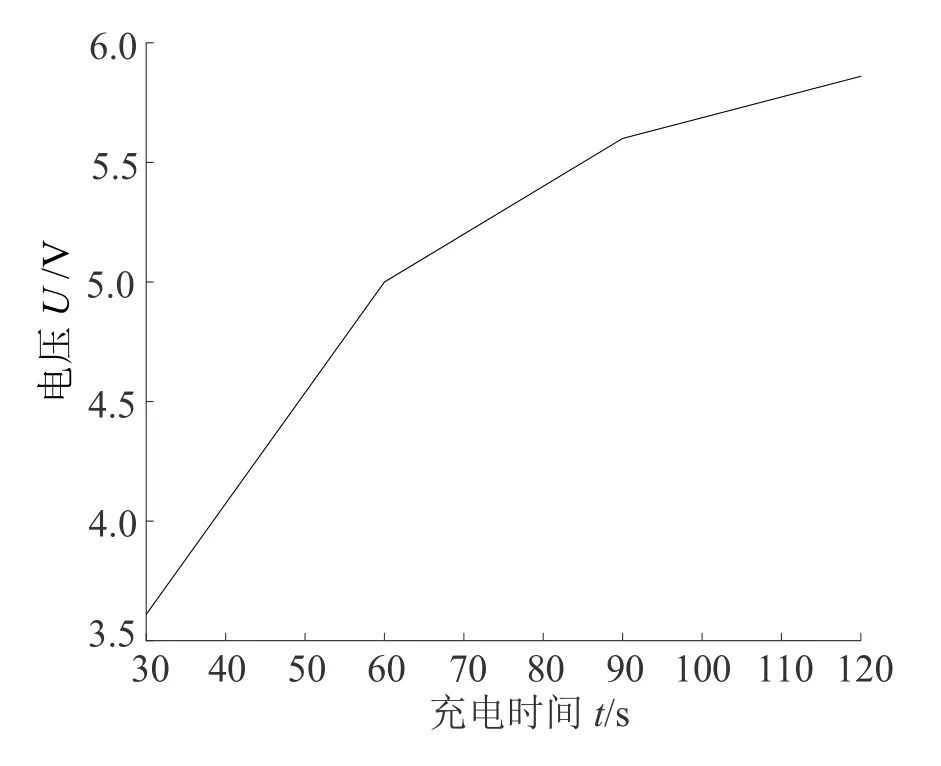
图17 电容充电电压曲线
5 结论
本文以MSP430F5529LP单片机为主控核心,设计了基于动态无线充电的草莓温室大棚自动输送车系统,主要由无线能量发射模块与接收模块、电机驱动模块、继电器控制模块、循迹模块与超级电容模块构成。通过超级电容模块为输送车快速充电,极大地提高了充电效率,降低了充电时间。使用TB6612FNG电机控制模块控制输送车的转弯、前进等运动,轻便灵活。在草莓运输过程中可进行不间断动态充电,无需停车,提高了转运效率,降低了采摘人员的劳动强度,进一步改善了我国温室大棚内草莓运力不足的现状,并为温室大棚内其他作物果实的多样化运输奠定了研究基础。