自动折叠喷洒臂的设计及运动学特性
2020-12-04吴哲汤跃余聪汤玲迪
吴哲,汤跃,余聪,汤玲迪
(江苏大学国家水泵及系统工程技术研究中心,江苏 镇江 212013)
卷盘喷灌机是一种适合中国耕地面积复杂、地貌类型多等特点的移动式机械灌溉机械,操作简单、维护方便,现已成为中国最具发展前景的灌溉机械之一[1-3].其喷灌时通过卷盘回卷PE管进而拉动喷灌车实现[4],故喷灌车的便利性、灵活性对其自动化程度有着较大的影响.由于国外的核心资料不对外公开,国内厂商将其购买并仿制,故国内仅有两大类型的机型,一种需要高入机水压的单喷头喷灌车,其不仅会对植物造成损伤,而且超出有效射程后,喷雾出现漂移,性能明显下降,使得灌溉的均匀性变得较差.另一种是对入机压力要求较低的桁架式喷灌车,其作业前需耗费较多的人力拼接桁架,作业效率低.
为了改善喷灌车的性能,国内外学者展开了较为丰富的研究工作.陈子财等[5]发明了一种由对称的左右翼桁架组成的折叠式双翼喷灌机桁架.汤跃等[6]通过虚拟样机软件ADAMS对喷洒车的爬坡能力和爬坡性能进行了仿真试验研究并做出优化,使喷洒车的爬坡角度提高了21.48%.YUKI等[7]研制了基于CAN总线的拖拉机喷洒装置,并对喷洒装置的性能试验进行了讨论.温浩军等[8]发明了一种用于高功率机车上的超宽幅喷杆式喷雾机,该喷雾机有效地减轻了大型喷雾机在运输和工作时对障碍物的碰撞.汤跃等[9]发明了一种高度自动化的伸展式喷灌车,该喷灌车通过蜗轮传动机构将喷管转动到竖直位置,使喷管在自身重力作用下实现回收.ENG等[10]通过ANSYS对喷杆式喷雾器集料板多角度进行模拟,从而找出最佳角度范围,使不同大小肥料和风机的风速更好地得到分配.余聪等[11-12]设计了一种三折叠喷洒臂桁架结构,并结合ADAMS动力学仿真技术对结构进行分析改进,使其桁架安装更具合理性.
综上所述,当前喷灌车上的喷灌装置主要适用于大型喷灌机,自动化水平较低且主要适用于较为平整的大面积土地的喷灌作业,然而中小型喷灌车需要配套较小跨幅的喷灌装置.故中小型喷灌车喷洒装置无法自动折叠的问题未很好地得到解决.文中在扑翼机构的改进基础上,设计一种适用于中小型卷盘喷灌机喷灌车的基于电动缸驱动的自动折叠喷洒臂机构,并通过矢量方程法建立喷洒臂的运动学模型,借助Simulink分析运动特征,以验证设计的合理性.
1 结构设计
1.1 折叠机构
图1为基于扑翼机构[13]改进后的类扑翼折叠机构简图,该机构由2组四连杆机构ABCD及EBFG耦合而成.机构的自由度F计算公式为
F=3(n-1)-2PL-PH+vP,
(1)
式中:n为总构件数;PL为低副个数;PH为高副个数;vP为由移动副构成的独立回路个数.
从图1可知,整个机构由6个构件、7个转动低副组成,结合式(1)可得该机构的自由度为1,故该机构只需驱动单构件即可驱动整个折叠机构.
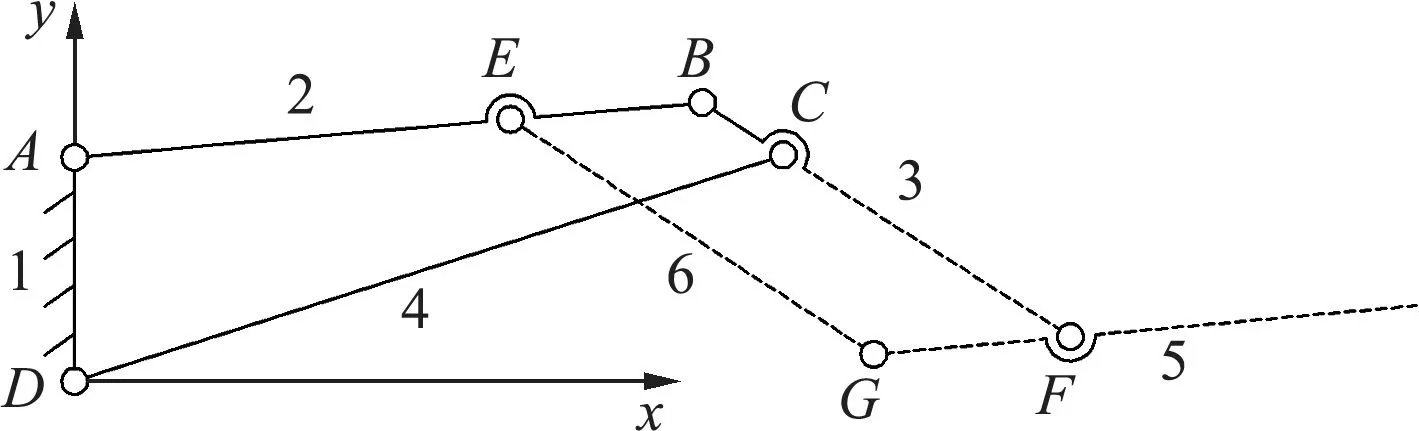
图1 类扑翼折叠机构
1.2 驱动机构
参考随车液压提升装置中平台升降机构[14],通过一组四连杆机构配合曲柄滑块机构进行驱动.由于液压装置的四连杆尺寸过大,如果将液压推杆铰接于四连杆的短连架杆上,液压推杆的运动行程将变得很大.
根据类扑翼折叠机构的特点,若将液压推杆作为驱动装置,则需重新设计液压控制系统,这使得原有结构变得更为复杂,制造成本提高,而且体积较小的喷洒臂也不适合装配该类型驱动,故采用体积相对较小的电动缸作为驱动装置,并通过铅蓄电池进行供能,同时电动缸可以通过成本较小的单片机控制,进而实现远程自动化控制的目的.图2为自动折叠喷洒臂的结构简图.

图2 结构简图
1.3 喷管连接方式
喷洒臂关节连接处的常用连接方式有软管铰链和轴承式旋转接头连接.软管铰链旋转结构虽起到固定的作用,但当喷灌直径较大时,会使得关节处水的质量变得很大,若结构材料刚度不够,运动到位后定形随机性较大.而轴承式旋转接头结构虽然刚度较强,转动性能较好,但由于成本较高,不适合运用在农业机械上.
基于上述2种连接方式的利弊,设计了一种通过铰链配合端面密封的端面密封铰链结构,其三维结构如图3所示.该结构的一侧铰链焊接在装有密封圈沟槽的法兰上,另一侧铰链焊接在装有密封圈的法兰上.当该结构闭合时,结构上的密封圈沟槽刚好与密封圈相紧贴,并借助电动缸的推力挤压,从而实现喷管连接处密封.
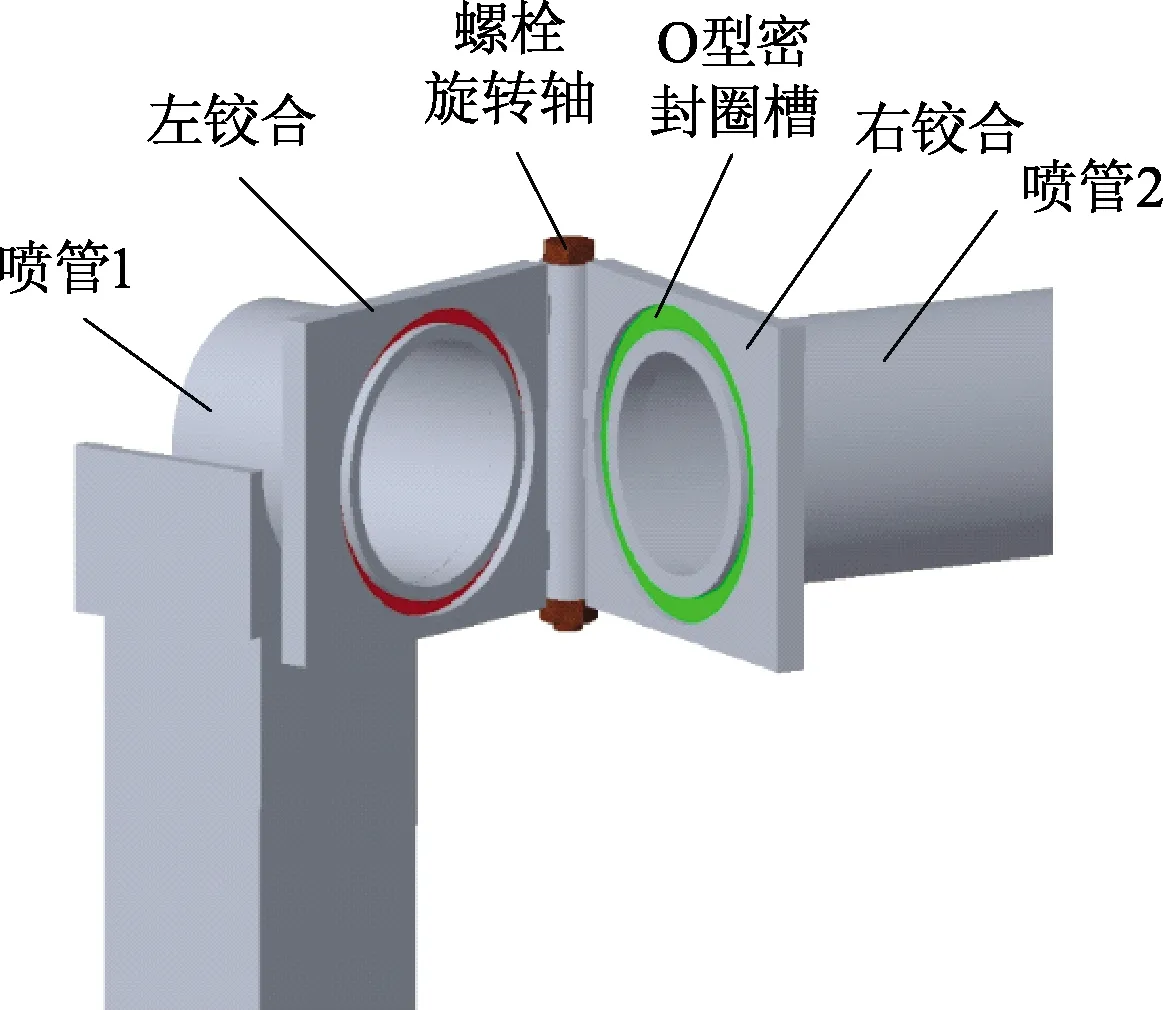
图3 端面密封铰链结构
图4为喷灌车两侧的自动折叠喷洒臂的三维结构,由3根长度为1 400 mm、直径为50 mm的喷管通过端面密封铰链连接,并通过电动缸驱动.

图4 自动折叠喷洒臂的三维结构
由图4可知,当喷洒臂完全展直时,3个端面密封铰链能够紧贴并借助电动缸的推力挤压实现密封而不漏水的功能;当喷洒臂折叠时,所有喷管逐渐紧贴并完全收拢于机架两旁.为了避免构件之间在折叠、展开时发生运动干涉,2个连杆在安装时需与喷管保持一定高度,这也为后面喷管上安装喷头预留足够的空间.喷管3需与连杆2焊接固定,而连杆1和2则通过普通铰接安装.
由于自动折叠喷洒臂跨度较大,故采用密度小、强度适中的铝合金材料加工焊接.
2 参数设计
2.1 折叠机构参数
由于喷洒臂的关节处采用端面密封铰链连接,而只有当左右2个铰合运动到接合位置时,该端面密封铰链才能实现较好地密封,故在设计时需把铰链的左右铰合宽度d考虑在内.同时需考虑各铰链关节的转动方向,以保证各个关节最终能有效地闭锁.
图5为折叠机构状态图.其中A,B,F为端面密封铰链连接;E,G,C为普通铰链连接.AD1,AA1,BB1,BC1,FF1,FG1分别为端面密封铰链A,B,C的左右铰合.
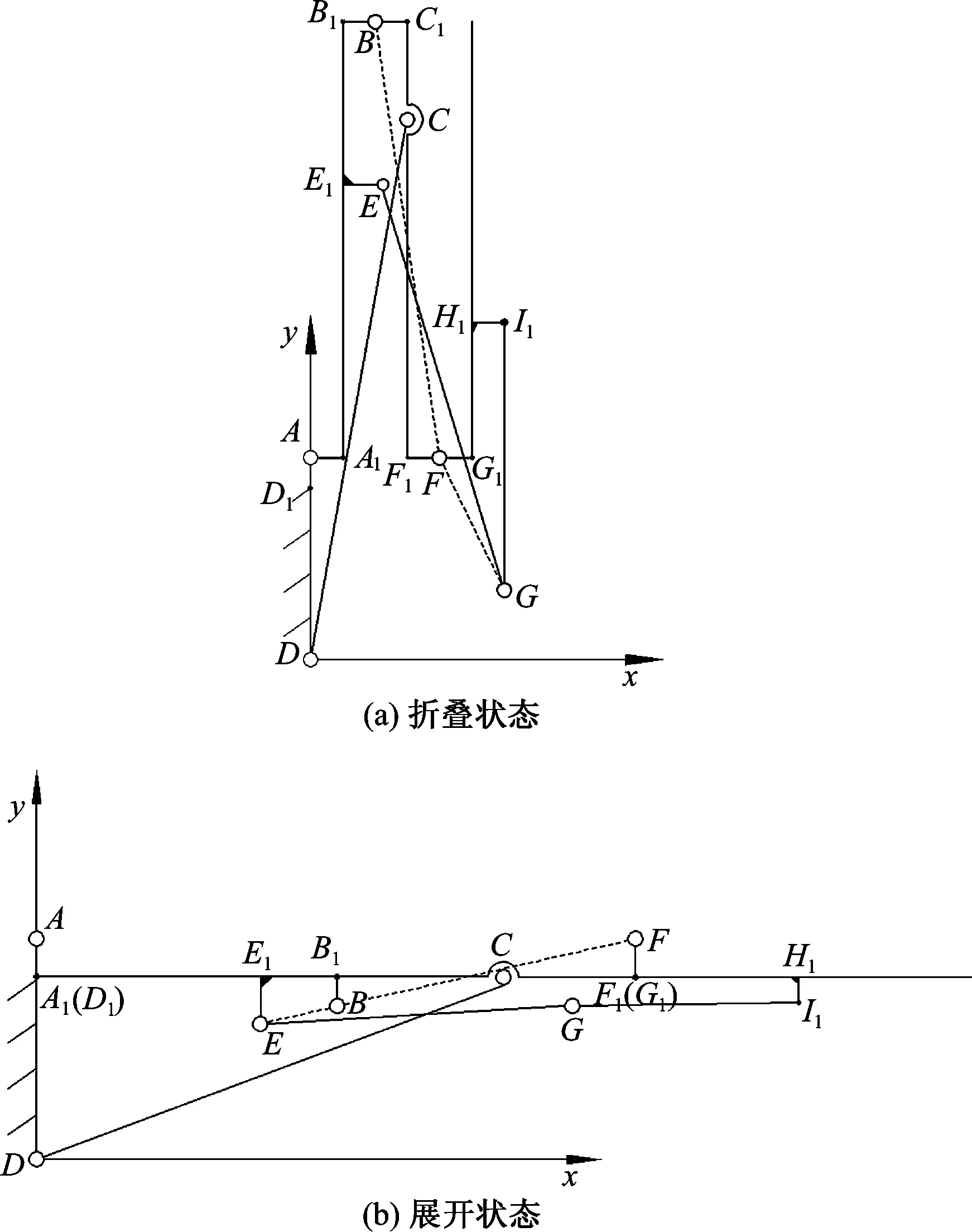
图5 折叠机构状态图
为了保证折展机构组在运动时不发生干涉,将铰链E进行偏心安装设计,同时添加短杆H1I1把杆GH1与杆G1H1进行相连.
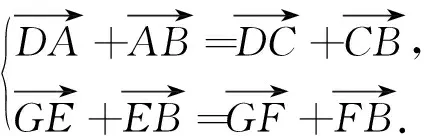
当折展机构组完全折叠时,AD1与AA1呈90°夹角,BB1与BC1呈180°夹角,FF1与FG1呈180°夹角;完全展开时,端面密封铰链A,B,F的左右铰合相合拢.以铰链D为坐标原点,建立直角坐标系,根据机构几何关系,得到折叠和伸展状态时的各杆件函数关系式:
(2)
(3)
各端面密封铰链的左右铰合宽度d均相等,且与喷管直径有关,同时为了避免干涉,各杆件需满足以下约束:
(4)
以喷管自身参数为基准,根据各杆件几何关系及约束,可得各杆件长度L,见表1.
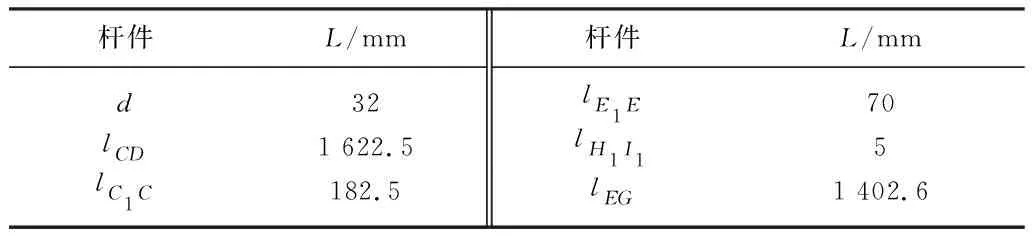
表1 各杆件长度
2.2 驱动机构参数


图6 电动缸状态图
根据图6几何关系可知,电动缸推杆的行程S满足如下公式:
(5)
由式(5)可得到电动缸行程S与电动缸距离铰接E的安装距离lHI关系图,如图7所示.当安装距离lHI增大到300 mm后,S始终保持在300 mm左右.当电动缸开始收缩时,电动缸的缸体到铰链J的距离不断减小,故避免了缸体与铰链J在折叠时发生运动干涉.缸体的安装距离lHI需满足使用要求,故初选缸体安装距离lHI=600 mm,电动缸推杆行程S=305 mm.
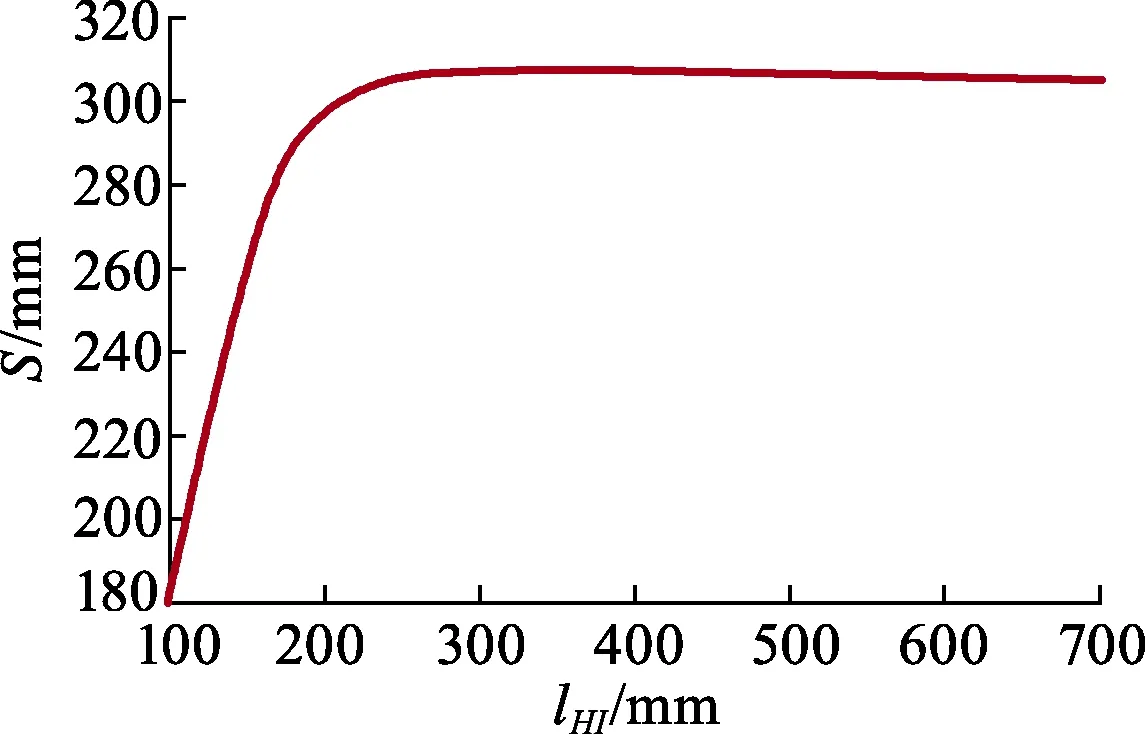
图7 推杆行程与安装距离的关系
3 运动学分析
运动学分析中,矢量解析法计算方便,分析流程清晰,因此采用矢量方程法对喷洒臂进行运动学分析.
3.1 整体建模
喷洒臂折叠与展开是通过电动缸推杆的伸缩实现的,故需定义电动缸推杆全局坐标下的转角及运动参数来分析喷洒臂的运动特征[15].
由上文可知,图2中各杆件尺寸li为已知量,定义杆li与x轴正向的夹角,取逆时针为正,故电动缸推杆运动过程转角为θ8.定义电动缸推杆向外运动的位移、速度、加速度分别为S,v,a.
喷洒臂封闭回路ABCD和EBGF的位置矢量环方程为
(6)
以复数表示位置矢量环方程,进行欧拉变换后得
(7)
式中:θ2,θ3,…,θ6分别为杆AB,BC,CD,FG,EG的角位移;θ′2,θ′3分别为杆EB,BF的角位移.
将位置矢量环方程对时间一次求导,可得到各杆件的角速度关系,对时间二次求导,可得到各杆件的角加速度关系.
3.2 Simulink运动仿真及分析
图8为喷洒臂运动仿真框图,根据各杆件的角加速度关系编写Function主函数[16-17].各杆件运动的角速度由角加速度一次积分后所得,其不仅作为反馈信号传递到Function主函数的输入端,又再次积分成为各杆件的角位移信号进行输出.整个仿真过程的输入量是电动缸推杆的参数:角位移θ8、位移S、速度v、加速度a,输出结果为喷洒臂各杆件角位移θ、角速度ω以及角加速度α.

图8 喷洒臂运动仿真框图
结合实际工况,电动缸推杆在启动时为正向加速运动,临近结束时为正向减速运动,所以电动缸推杆的运动参数可以通过如图9所示的正弦信号进行替代仿真,不仅简便,而且还能较好地还原电动缸推杆的真实运动情况.

图9 推杆运动模拟曲线
仿真得到各杆件的角位移、角速度以及角加速度变化情况,如图10所示.
由图10可知,喷洒臂在实际展开过程,喷管1开始运动时与水平方向垂直,呈90°夹角,当完全展开时与水平方向一致;喷管2和3完全展开后与喷管1在同一水平直线方向上;3个喷管在展开过程中总体运动较为平稳,当推杆运动结束后,3个喷管也相应地顺时针转动了90°.与此同时,喷管之间的端面密封铰链也旋转到位而密封,关节处的密封圈因电动缸的推力挤压而不发生漏水现象.
由于电动缸在启动和临近结束时的瞬间加速度过大,使得各杆件在1.5~2.0 s和8.5~9.0 s时间段的运动存在较大的波动,这对杆件的稳定性有着不利的影响.故在实际工况下,为了减少驱动结构中各杆件在运动时的受力大小,需降低启动和临近结束时的电动缸推杆加速度.

图10 各杆件运动情况
4 结 论
1) 以类扑翼折叠机构为基础,设计了一种基于电动缸驱动的自动折叠喷洒臂,并基于传统连接方式的利弊做出改进,创新设计了一种通过铰链配合端面密封的端面密封铰链结构;同时根据喷洒臂在完全折叠、完全展开时的几何关系建立了各杆件的参数约束方程,确定了各杆件的长度.
2) 通过Simulink仿真平台,建立起喷洒臂结构运动仿真模型.结果表明,喷洒臂从完全折叠到完全展开的过程中,各杆件运动总体较为平稳,喷灌之间的端面密封铰链转角能从0°运动到90°,说明喷洒臂的运行性能符合要求,端面密封铰链在运动到位后可以实现自密封;由于电动缸推杆在启动和临近结束时加速度过大,使得各杆件产生运动冲击,故应降低启动和临近结束的电动缸推杆的加速度,以提高杆件运动的稳定性.
