扑翼的变刚度设计及其对升力和推力的影响
2020-12-01李康康陈巍巍
李康康,陈巍巍
1. 南昌航空大学 航空制造工程学院, 南昌 330063 2. 哈尔滨工业大学 机电工程学院,哈尔滨 150001
鸟类和昆虫等采用扑翼飞行模式的生物通过自身肌肉驱动扑翼上下扑动和扭转以产生升力和推力[1-3]。同时扑翼在扑动方向和扭转方向都具有肌肉的柔性[4-5],通过调节肌肉柔性可改变扑翼的刚度,从而调节扑翼的固有频率[6-7]。扑翼气动特性的研究表明,扑翼的柔性变形能大大改善扑翼的气动性能[8-10],Khan等在扑翼飞行器的扑翼上采用弹性元件使扑翼在扑动方向和扭转方向都具有柔性,建立了扑翼升力理论模型,并通过实验验证扑翼升力随扑动频率变化的曲线[1]。Wang等通过运动学和动力学理论计算柔性扑翼升力随扑动频率的变化[11]。Khan和Wang等的研究结果都表明对于一定刚度的柔性扑翼,扑翼的升力先随扑动频率的增加而增加,当扑动频率为某一值时,柔性扑翼产生的升力最大,之后随着扑动频率的增加而减小[1, 11]。为研究柔性扑翼的推力,Roget等搭建了扑翼飞行器样机,通过样机实验得到扑翼飞行器的推力曲线,推力曲线表明通过调节扑翼的扑动频率产生共振使扑翼推力最大[10]。
以上研究结果表明,存在一个扑动频率匹配一定刚度的柔性扑翼,使扑翼的升力、推力最大。目前学者研制的扑翼飞行器的扑翼刚度不能调节,只能在一个扑动频率实现最大的升力和推力[12-15]。然而,生物鸟类根据需要通过改变扑动频率形成低频到高频对应的滑翔、转弯、悬停等动作[1-2],并且扑翼通过上下扑动和扭转以产生升力和推力。类似地,扑翼飞行器需要调节不同的扑动频率以适应不同工况,并且实现扑翼的扑动动作和扭转动作[16-17]。本文拟采用变刚度串联关节机构和平面转动冗余并联机构构造变刚度扑翼。变刚度关节通过改变弹性元件的预张力调节自身的转动刚度[18-21]。平面转动冗余并联机构通过调节对抗内力改变自身的转动刚度[22-25]。通过变刚度关节机构相互串联达到扑翼扑动方向上变刚度,同时通过平面转动冗余并联机构实现扑翼扭转方向上变刚度,以期借助调节扑翼刚度来匹配扑翼不同的扑动频率,提高扑翼的升力和推力。
1 扑翼的变刚度设计
1.1 扑翼的变刚度机构
以鸟类扑翼为仿生对象,如图1所示,其骨骼由四节组成,四节骨骼由羽毛覆盖。扑翼通过上下扑动和扭转以产生升力和推力[9]。通过调节扑翼的刚度改变翼面在扑动过程中的翼型,以提升扑翼的气动性能[26-27]。
采用4节变刚度关节相互串联组成变刚度串联关节机构模拟鸟类扑翼的骨骼。采用蒙皮模拟鸟类的羽毛覆盖变刚度串联关节机构,蒙皮的刚度固定不变。扑翼的刚度由串联关节机构的刚度和蒙皮的刚度组成,通过调节串联机构的各节关节的刚度可以改变扑翼的整体刚度,从而改变翼面在扑动过程中的翼型,提升扑翼的升力和推力。变刚度串联关节如图2所示,各节变刚度关节的杠杆臂OiAi绕旋转中心Oi转动。各节变刚度关节用同一根弹性元件施加预张力,弹性元件在各节变刚度关节的Bi点通过两根插销限位。各节变刚度关节的预张力相等,通过调节弹性元件预张力f0可设置不同的扑动关节的刚度。
按照优化的基本原理,密封端面出现的小锥度收敛间隙为机械密封的最佳情况。因为端面开口形状呈锥度,其大小不能为无限小,因此对锥度值要求很难满足。
为模拟鸟类的扑翼动作和翼面翼型调节机理,设计了变刚度扑翼的结构。起始位置时变刚度扑翼的结构如图3所示,扑翼的扑动机构为变刚度串联关节机构,扑翼分为4节,各节扑翼与各节变刚度关节相连,变刚度串联关节机构由蒙皮覆盖。扑翼的扑动刚度由串联关节机构的刚度和蒙皮的刚度组成,通过调节串联机构的各节关节的刚度可以改变扑翼的整体扑动刚度。扑翼在起始位置时,其扭转机构为对称的变刚度关节。扑动轴可绕扑动中心上下旋转使扑翼上下扑动以产生升力和推力,扭转机构的杠杆臂可绕扑动轴上的扭转中心转动,使扑翼扭转。通过调节扑翼的扑动刚度和扭转刚度以改变扑翼翼面的翼型,从而改变扑翼的升力和推力。
其一,履行判决。依据《行政诉讼法》第78条,行政机关不依法履行、未按照约定履行行政协议的,人民法院判决行政机关承担继续履行、采取补救措施或者赔偿损失等责任。依据《税收征管法》的规定,纳税人在提起行政诉讼之前存在着“纳税前置”。如法院认为预约裁定合法有效且纳税人的交易事项确乎符合裁定约定的,应判决税务机关履行预约裁定,税务机关应向纳税人返还多缴纳的税款并且向纳税人赔偿多缴纳的税款在此期间所产生的利息损失(建议按同期银行贷款利率计算)。另外,如果税务机关在预约裁定中对税法作出的行政解释与上位法相抵触,但纳税人属于善意不知情的情况下,基于信赖保护原则,法院仍应作出履行判决。
扑动过程中的扑翼如图4所示,扑翼通过扑动机构和扭转机构分别模拟了鸟类扑翼的扑动动作和扭转动作。当扑动轴绕扑动中心上下旋转时,扑翼上下扑动,使扑翼扭转机构两侧的杠杆臂上下移动,此时扑翼的扭转机构由对称的变刚度关节转化为平面转动冗余并联机构。当平面转动冗余并联机构的上平台两侧铰点中心距不等时,扑翼扭转机构两侧力臂不相等,弹性元件作用力产生的力矩不相等,从而使扑翼扑动q角度的同时产生一定扭转角度θ。通过调节平面转动冗余并联机构的刚度可改变扑翼的扭转刚度。
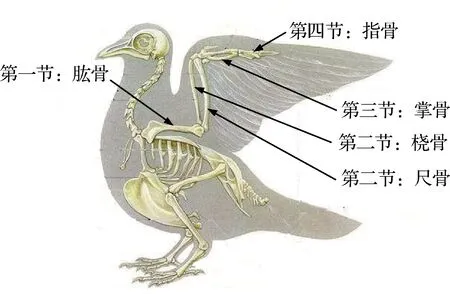
图1 扑翼的骨骼Fig.1 Skeleton of flapping wings
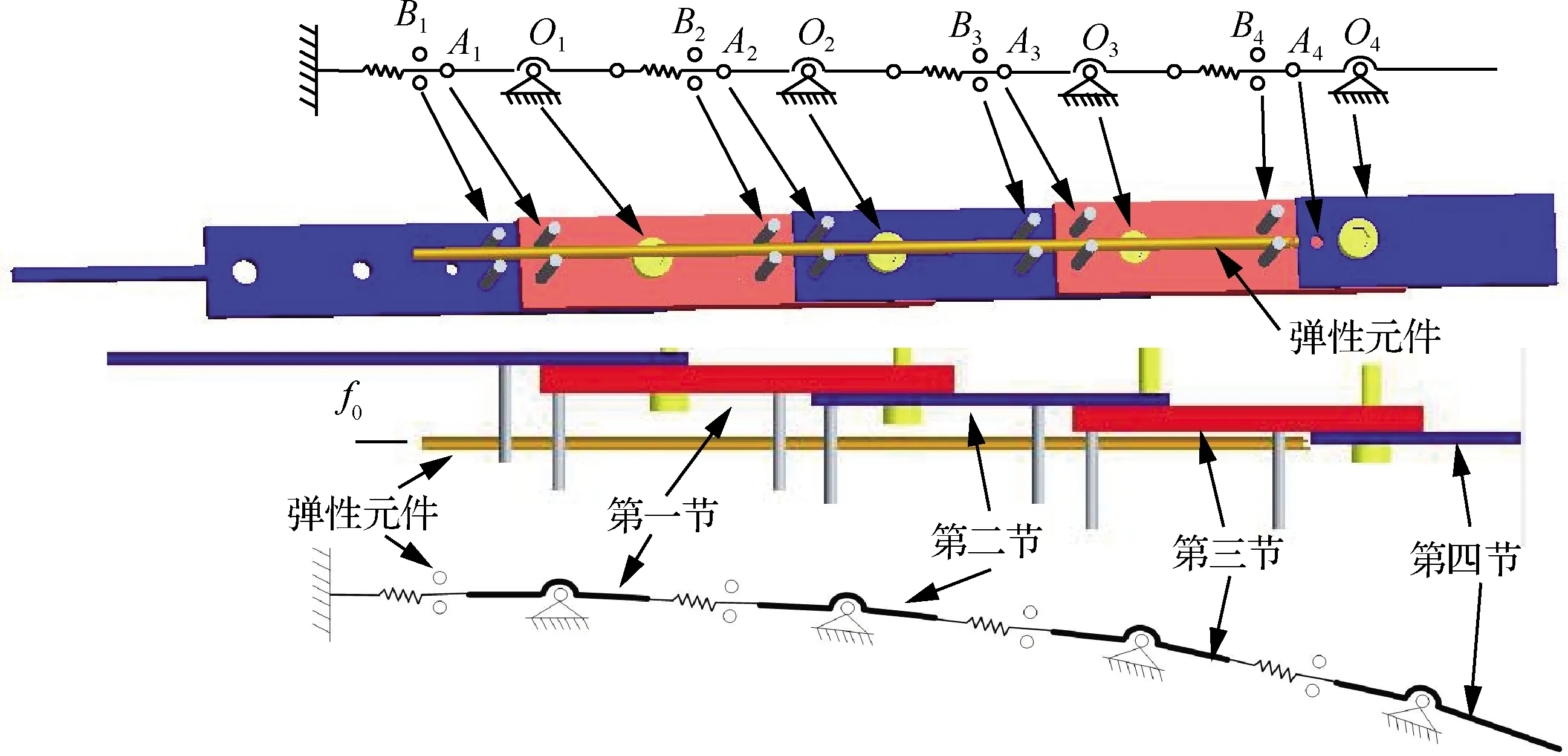
图2 变刚度串联关节Fig.2 Variable-stiffness serial joints
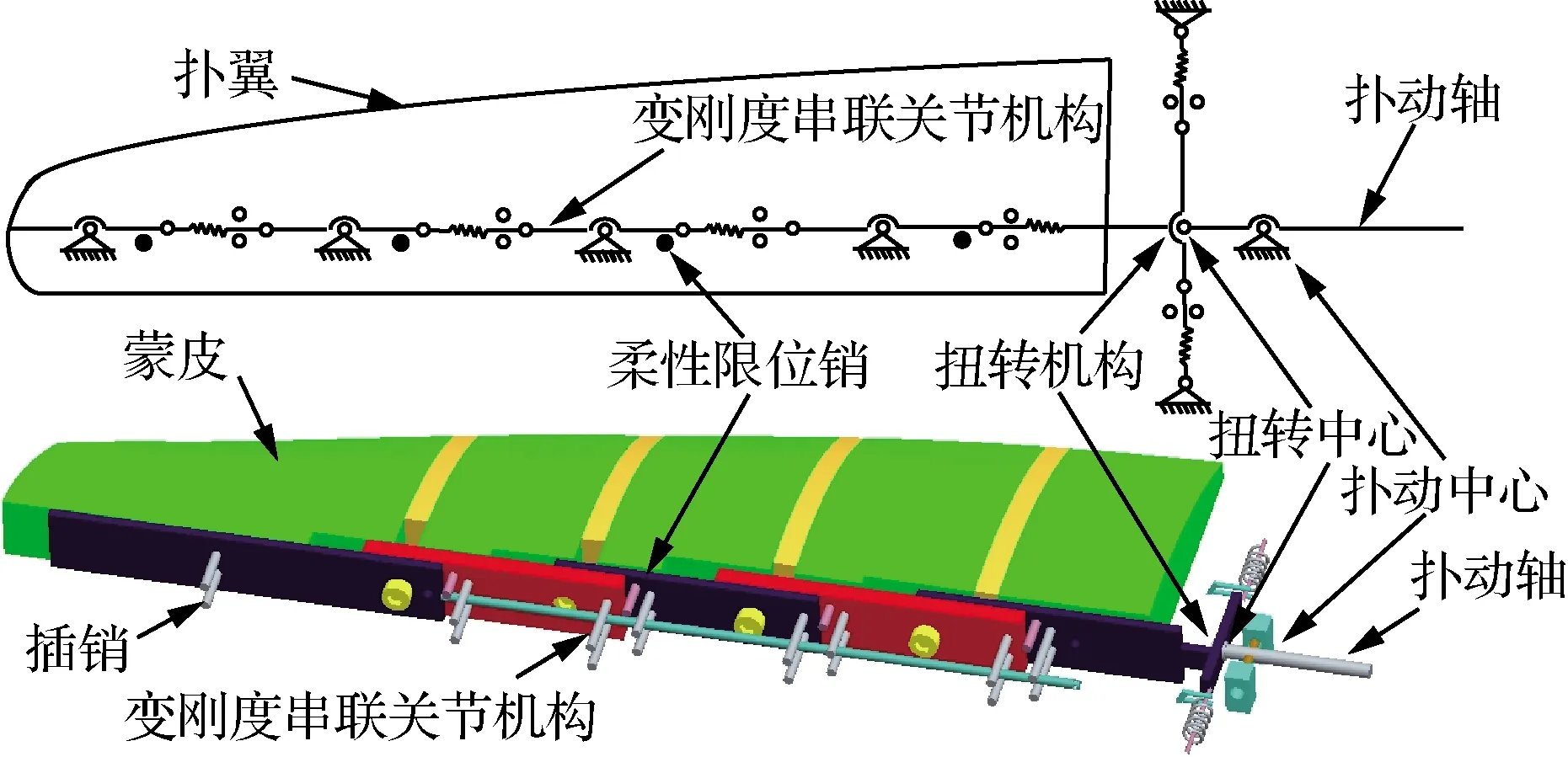
图3 起始位置变刚度扑翼Fig.3 Variable-stiffness wing at starting position
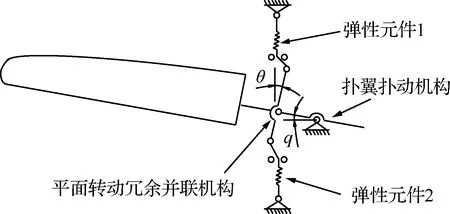
图4 扑动过程中的扑翼Fig.4 Flapping wing during flapping
变刚度扑翼示意图如图5所示,舵机往复转动一个角度,通过驱动四连杆机构使扑翼上下往复扑动。同时在扑翼上下扑动过程中,扑翼往复扭转。同时调节舵机驱动频率使扑翼以不同扑动频率扑动。此外,变刚度串联关节机构和平面转动冗余并联机构的弹性元件与牵引线相连,通过离线手动拉伸牵引线调节弹性元件预张力,以改变扑翼的扑动刚度和扭转刚度。预张力通过与牵引线相连的力传感器精确测得,从而根据测得的预张力计算扑翼的刚度变化。
从上文分析可以看到,现在适用权利用尽理论的主要经济体,除了美国已经否定了该规则的区别适用理论之外,德国、日本及我国都还多多少少保留着区别适用的情况。
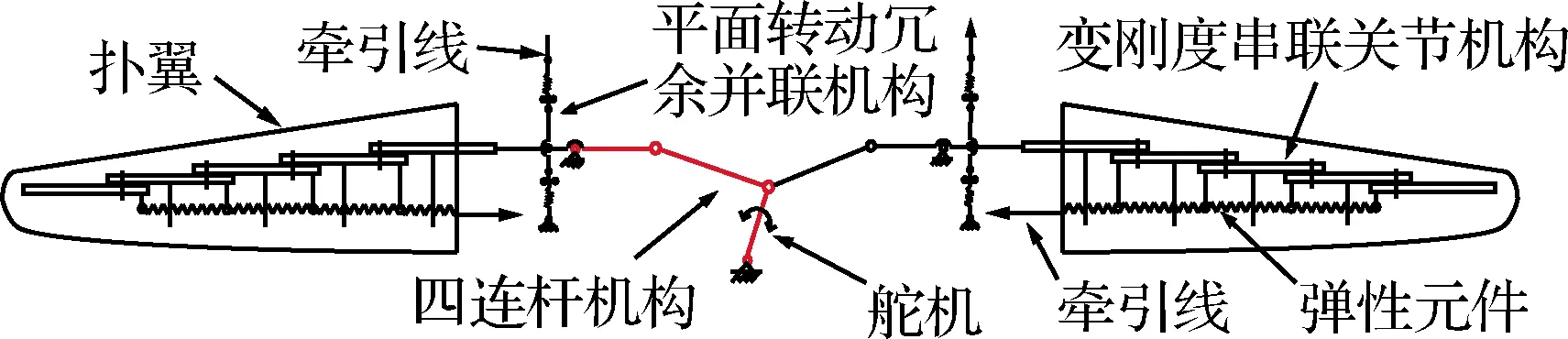
图5 变刚度扑翼示意图Fig.5 Schematic of variable-stiffness flapping wings
1.2 扑翼的扑动刚度变化
扑翼的整体扑动刚度通过变刚度串联关节机构调节,变刚度串联关节机构由4节变刚度关节相互串联组成。变刚度关节如图6所示,此机构的杠杆臂OA通过牵引线AD与弹性元件C相连。杠杆臂OA绕旋转中心O转动,牵引线通过B点处的两根插销限位。杠杆臂转角q=0时,牵引线限位点B与杠杆臂OA在一条线上。当杠杆臂从平衡位置转动时,弹性元件拉伸对抗杠杆臂转动。通过改变弹性元件C产生的预张力f0可连续调节变刚度关节的转动刚度。XOY是基准坐标系,x0Oy0是旋转坐标系,它的y0轴固定在OA上,ra为杠杆臂OA长度,rb为旋转中心O与牵引线限位点B之间的距离。
转动刚度K为施加的转矩Q对转角q的偏导,转动刚度的表达式为[28-30]
将式(7)代入式(8)得牵引线AB矢量为
Q=rTEf
(1)
如图6所示,施加在杠杆臂OA上的转矩为
圆通和其他的民营快递企业一样使用是加盟制,在加盟制下以管代罚,快递员社会地位较低,公众尊重缺失,从工作环境看环境差,完全是户外工作,强度又高,员工的风险得不到保障,因此有许多的快递派送员都转行去了外卖平台,这是直接导致圆通快递人员流失严重的重要原因之一。
(2)
弹性元件输出力f分解为x、y方向分力fx、fy,弹性元件输出力的表达式为
式中:f0i为左侧牵引线C1D1的内力f01和右侧牵引线C2D2的内力f02,li为左侧牵引线C1D1长度l1和右侧牵引线C2D2长度l2,Rdi是下铰点D1的中心距Rd1和下铰点D2的中心距Rd2,Rci是上铰点C1的中心距Rc1和上铰点C2的中心距Rc2。
(3)
式中:|f|为弹性元件输出力大小;Ln为牵引线AB单位矢量,Ln=L/|L|,L为牵引线AB矢量,|L|为牵引线AB的长度。
将式(2)代入式(1),得变刚度关节的转动刚度为
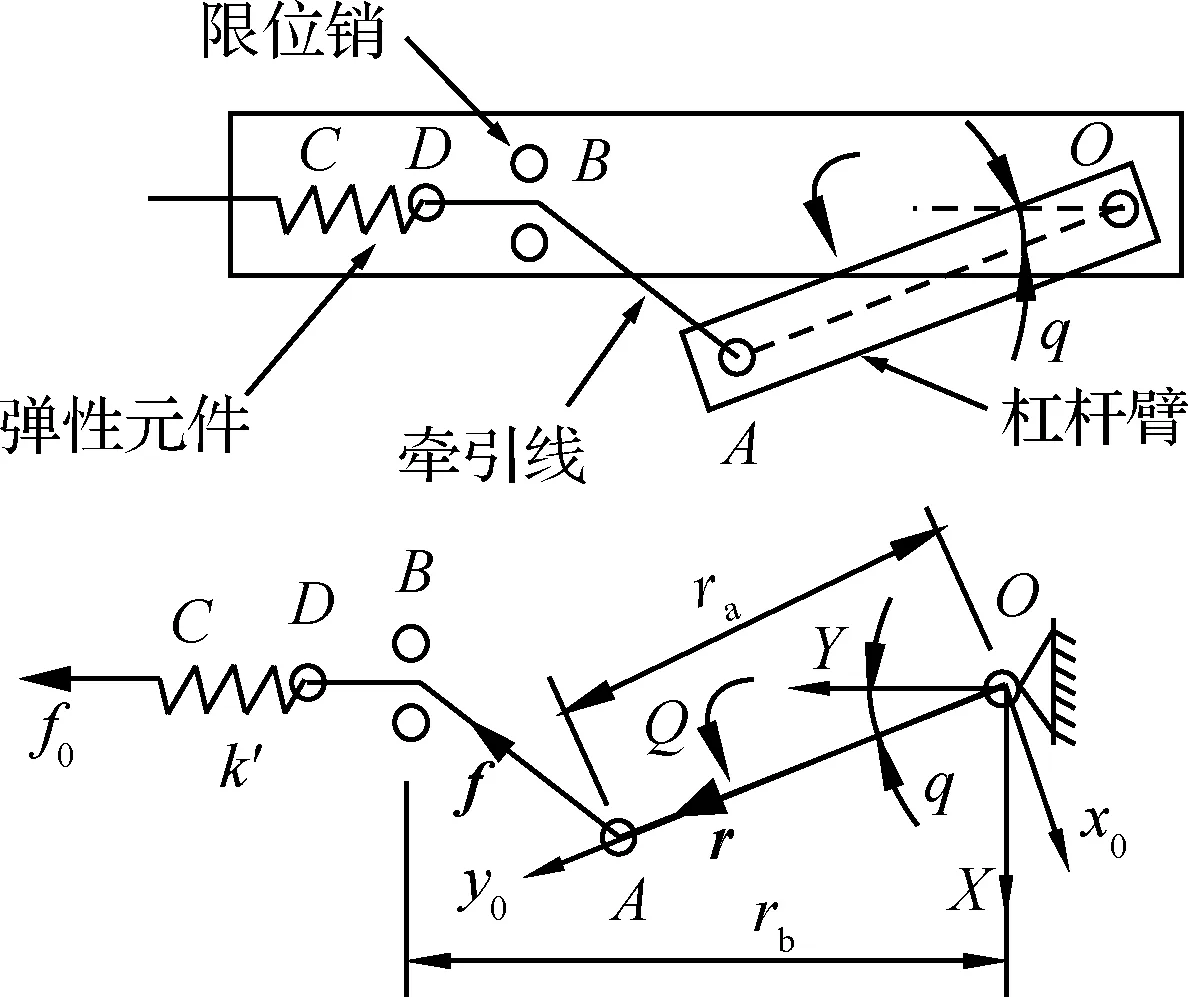
图6 变刚度关节示意图Fig.6 Schematic of variable-stiffness joint

(4)

(5)
将式(5)代入式(4),得转动刚度为
(6)
式中:k′为弹性元件刚度。
在相同质量流率的情况下,随着微通道分支数n的增大,热沉最大热应力σ逐渐降低。当质量流率=1.5g/s时,微通道分支数为n =8,与n=3、4、6时的最大热应力相比较,分别降低0.106、0.061、0.025GPa,降低幅度分别为26.9%、17.5%、8.0%。
如图6所示,杠杆臂OA的矢量为

(7)
牵引线AB矢量为

(8)
由式(3)得
2017年,林芝市粮食播种面积1.691万hm2,其中青稞播种面积为0.500万hm2。2017年,林芝市种植的青稞品种有藏青320、藏青2000、喜拉22号、冬青18、果洛和山青9号等。2017年,从山南、日喀则、拉萨等地引进新品种种子共142 t,品种有藏青2000、喜拉22号、冬青18号、山青9号。
L=[-rasinq,rb-racosq]T
(9)
牵引线AB矢量长度为
(10)
由式(4)得扑翼的关节刚度和转角q之间的解析式为
(11)
由牵引线C1D1对上平台转动刚度K1求解方法与求解变刚度关节刚度的求解方法类似,根据式(6)可得到平面转动冗余并联机构初始位置时总的刚度为
(12)
由式(12)可知,变刚度关节的刚度与预张力成正比,随预张力的增加而增加。通过调节变刚度串联关节机构的刚度改变扑翼的整体扑动刚度。变刚度串联关节示意图如图7所示,4节变刚度关节相互串联组成变刚度串联关节机构。各节变刚度关节用同一根弹性元件施加预张力,各节变刚度关节的预张力相等。
由式(12)可知,初始位置时各节变刚度关节刚度为
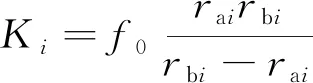
(13)
式中:rai为各节变刚度关节的杠杆臂OiAi长度,rbi为各节变刚度关节的牵引线限位点Bi中心距。由此可知,扑翼刚度与弹性元件预张力成正比,通过连续调节预张力可改变扑翼的扑动刚度。
由式(13)可知,4节变刚度关节之间的刚度之比为
K1∶K2∶K3∶K4=
(14)
由式(14)可知,通过设计各节变刚度关节牵引线限位点中心距rbi和杠杆臂长度rai可实现扑翼的刚度分布保持恒定。

图7 变刚度串联关节示意图Fig.7 Schematic of variable-stiffness serial joints
1.3 扑翼的扭转刚度变化
在扑翼扑动过程中,对称的变刚度关节的杠杆臂C1C2向上移动,C1、C2与牵引线限位点D1、D2不在一条直线上。此时扑翼扭转机构由图8(a) 的对称的变刚度关节转化为图8(b)的平面转动冗余并联机构,扑翼扭转刚度通过调节平面转动冗余并联机构的刚度改变。通过调节机构两侧牵引线内力f01、f02改变机构转动刚度。如图8(b)所示,当平面转动冗余并联机构的上平台铰点C1、C2中心距Rc1≠Rc2时,牵引线C1D1、C2D2的作用力对上平台C1C2产生的转矩不相等,使上平台绕旋转中心O偏转一定角度q后重新达到平衡位置,从而使扑翼扑动一定角度的同时产生一定扭转角度。XOY是基准坐标系,x0Oy0是旋转坐标系,它的x0轴固定在OC2上。
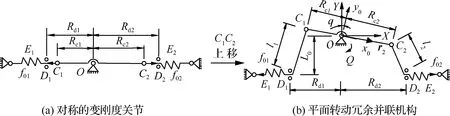
图8 变刚度关节到平面转动冗余并联机构的转化Fig.8 Transformation from variable-stiffness serial joint to RPRPM
如图8(b)所示,并联机构上平台的转矩Q由左侧牵引线C1D1对上平台转矩Q1和右侧牵引线C2D2对上平台转矩Q2组成,即Q=Q1+Q2。因此平面转动冗余并联机构的刚度由牵引线C1D1对上平台产生的刚度K1和牵引线C2D2对上平台产生的刚度K2组成,机构整体转动刚度为
K=K1+K2
现代技术给体育带来了巨大变革,不仅改变了体育锻炼的形式,而且大力地推动了体育产业的发展。现代体育的社会背景是浮华的资本社会,人类因对荣誉与财富的追求,丢失了内心本性的追求与伦理道德的标杆。竞技体育追求的是“更高、更快、更强”,最初目的是让运动员不断突破个人的极限,挖掘人类最自然的力量,将人类恢复到最“强蛮”的状态,以抵御其他人和自然、天气的伤害。保障幸福与安然生存的前提条件是,公平公正地进行每一次肉体间的较量,公正和平、顽强拼搏的体育精神既是对人类思想道德的规约,也是对人类自我欲望的约束。
(15)
因此为求解平面转动冗余并联机构的转动刚度,需要先分别求解牵引线C1D1和牵引线C2D2的刚度。
嫁接地点位于赛里木镇5村与8村。该镇位于拜城县县城以东,直线距离28公里。地处天山南麓,地势北高南低,北部为山区,南部为平原,平均海拔高度1201-1396 m。可耕地面积为51661亩,土质绝大部分为砂壤土。属中温带大陆性干旱气候。年平均降水量为88 mm,年平均蒸发量为1638.2 mm。年平均气温为8.5℃,1月份平均气温为-15.6℃,7月份平均气温为23.8℃,全年无霜期150-160天左右,有较丰富的地下水资源。
围岩蚀变类型主要为钠长石化、云英岩化、绢云母化、电气石化、绿泥石化、叶蜡石化等。其中钠长石化、云英岩化、绢云母化与矿化关系密切,为近矿围岩蚀变。
如图8(b)所示,旋转中心O和牵引线与上平台连接点C2之间的矢量为
(16)
式中:Rc2为上平台铰点C2中心距。
牵引线C2D2矢量为
虽然当前乡镇中心幼儿园教师队伍的管理工作仍面临诸多问题,但要不惧困难迎难而上,积极面对压力与挑战,采取多种有效方法全面打造教师队伍。从上级部门到乡镇幼儿园本身等多层面、多角度落实与开展教师队伍管理工作,及时发现问题与解决问题,为乡镇中心幼儿园教师队伍的良好建设与管理做不断的努力与尝试。
(17)

由式(17)得牵引线C2D2矢量为
L2=[Rd2-Rc2cosq,-L0+Rc2sinq]T
(18)
牵引线C2D2单位矢量Ln2为
要着力解决面临的特殊困难。贫困地区义务教育学校大多地处边远,地广人稀、交通不便、情况各异,存在许多特殊困难,应有针对性地采取措施,加以解决。
Ln2=L2/l2
(19)
式中:l2为牵引线C2D2的长度。
平面转动冗余并联机构的刚度求解过程与变刚度关节类似,即转动刚度为施加的转矩对转角的偏导。所以将式(16)、式(19)代入式(6)得牵引线C2D2对上平台转动刚度为
(20)
式中:f02为牵引线内力,k′为弹性元件E1、E2刚度,L0是旋转中心O与下平台D1D2之间距离。
转角q=0的初始位置时,由式(10)和式(11)得到的变刚度关节刚度为
(21)

扑翼的扭转刚度通过调节平面转动冗余并联机构的刚度改变,由式(21)可知,扑翼的扭转刚度可通过调节机构内力改变。
2 扑翼刚度对升力和推力影响实验
为研究扑翼的变刚度串联关节机构刚度随预张力的变化,搭建了变刚度串联关节机构刚度测试实验台。如图9(a)所示,串联关节机构的各节变刚度关节用同一根弹性元件施加预张力,弹性元件与力传感器相连,通过调节弹性元件预张力f0可设置不同的扑动刚度,弹性元件的预张力通过力传感器测得。4节变刚度关节的杠杆臂长度分别为ra1=25 mm,ra2=23 mm,ra3=19 mm,ra4=14 mm,牵引线限位点中心距分别为rb1=30 mm,rb2=28 mm,rb3=25 mm,rb4=22 mm。变刚度串联关节机构实验台信号采集系统如图9(b) 所示,在变刚度串联关节机构自身重力负载作用下,机构转过一定角度。激光笔安装在变刚度串联机构的各节关节上,激光笔激光投影在坐标纸上,以测得变刚度串联关节机构的各节关节转角。变刚度串联关节机构的各节实验刚度由负载转矩和测得的转角之比得到。
扑翼的变刚度串联关节机构刚度是扑翼整体扑动刚度的组成部分,通过调节关节刚度可以改变扑翼的扑动刚度。理论计算和实验得到扑翼各关节刚度随弹性元件预张力的变化如图10所示。根据式(3)可计算得到扑翼的关节刚度。实验结果与理论结果接近,同时由于实验台的摩擦力,实验得到的刚度大于理论计算的刚度。刚度曲线表明扑翼的关节刚度与预张力成正比,通过调节预张力可实现扑翼的关节刚度变化10倍,同时4节变刚度关节的刚度比值保持恒定,扑翼的刚度分布保持恒定。
在勃兰兑斯看来,华兹华斯是一个纯粹的英格兰人,他就像一株老橡树深深地扎根在帝国的文明沃土之上,他厌恶一切异族,如同厌恶法国一样[28]62-63。勃兰兑斯的论述略显偏颇,至少华兹华斯在对苏格兰的战争暴力的态度上表现了矛盾之情。诗人对于英苏战争的态度表征了其作为以言说世间真理、书写人间悲苦的浪漫主义诗人的个人情感与掺杂了政治因素的民族情感的冲突。
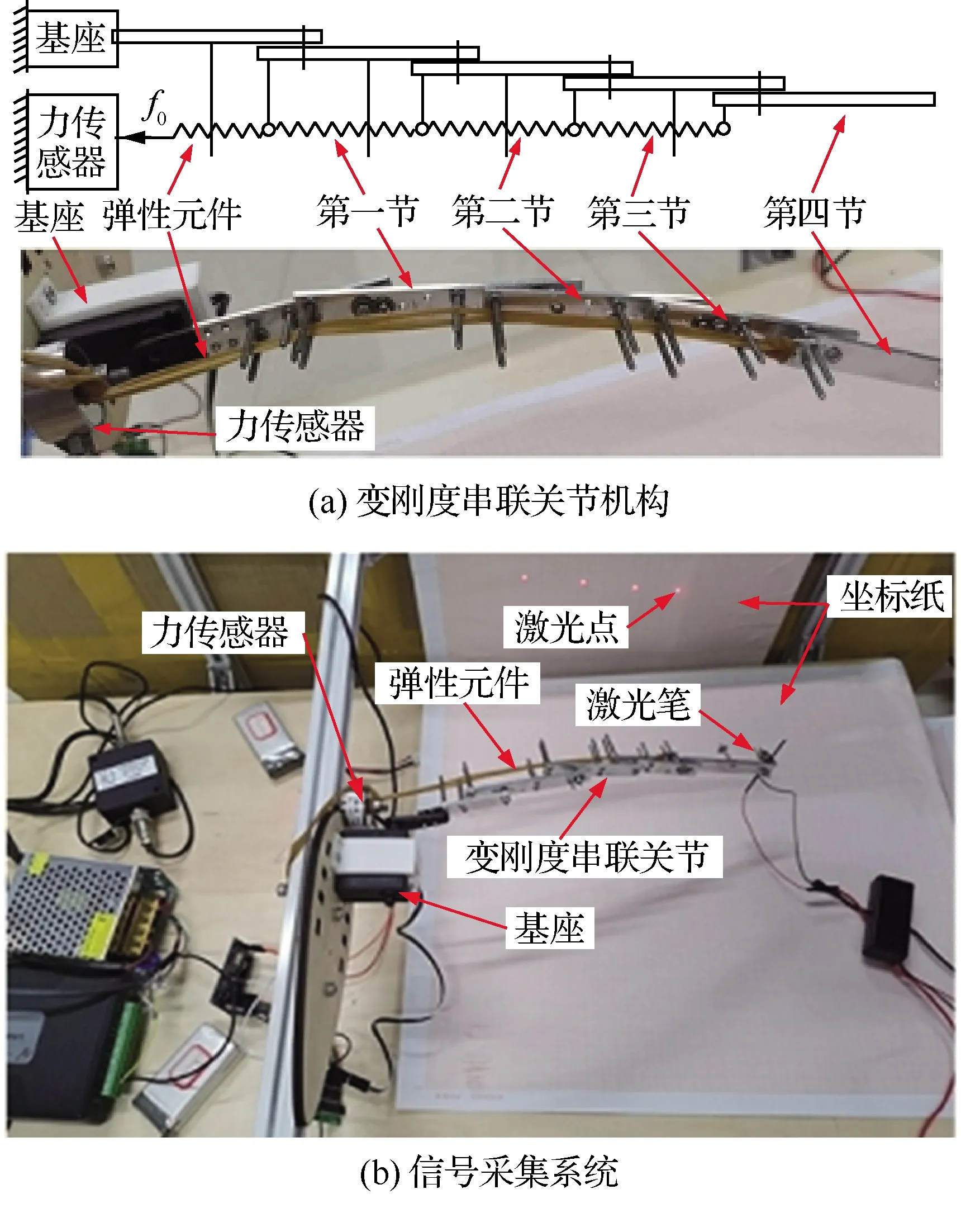
图9 变刚度串联关节实验台Fig.9 Experiment setup of variable-stiffness serial joints
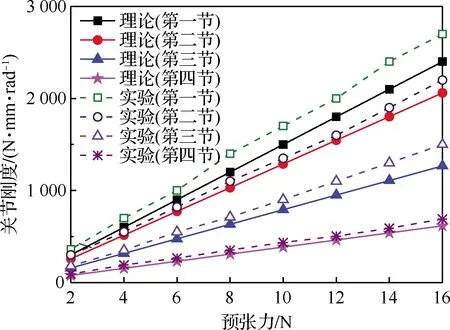
图10 扑翼的关节刚度随预张力变化Fig.10 Joint stiffness variation of flapping wing with pretension
由于扑翼扭转机构尺寸很小,难以采用实验验证扑翼扭转机构的刚度。Matlab SimMechanics可对机械系统的运动学和动力学进行物理建模仿真,所以采用Matlab SimMechanics仿真验证。扑翼扭转机构的SimMechanic仿真模型如图11(a)所示,扑翼扭转机构为平面转动冗余并联机构,平面转动冗余并联机构由上平台、左侧牵引线、右侧牵引线和中间旋转中心组成。如图11(b) 所示,在扑翼上下扑动过程中,当扑翼扭转机构的上平台C1C2向上移动时,使上平台与牵引线限位点D1、D2不在一条直线上。此时扑翼的扭转机构由对称的变刚度关节转化为平面转动冗余并联机构。同时由于平面转动冗余并联机构两侧力臂不相等,使左侧牵引线和右侧牵引线的作用力对上平台产生的转矩不相等,上平台绕旋转中心O偏转一定角度后重新达到平衡位置。从而使扑翼产生一定的扭转角度。通过调节机构两侧牵引线内力改变机构转动刚度。通过施加转矩在上平台以产生转角,仿真的刚度是转矩对转角的比值。
通过理论计算和仿真得到扑翼扭转机构的刚度随弹性元件预张力的变化如图12所示。平面转动冗余并联机构的弹性元件的刚度为k′=1 N/mm,上铰点中心距分别为Rc1=5 mm,Rc2=10 mm。下铰点中心距分别为Rd1=10 mm,Rd2=15 mm。根据式(21)可计算得到扑翼扭转机构的理论扭转刚度随预张力的变化,刚度曲线表明仿真结果接近于理论结果。这表明通过调节平面转动冗余并联机构弹性元件的预张力可改变扑翼的扭转机构的刚度,从而改变扑翼的扭转刚度。
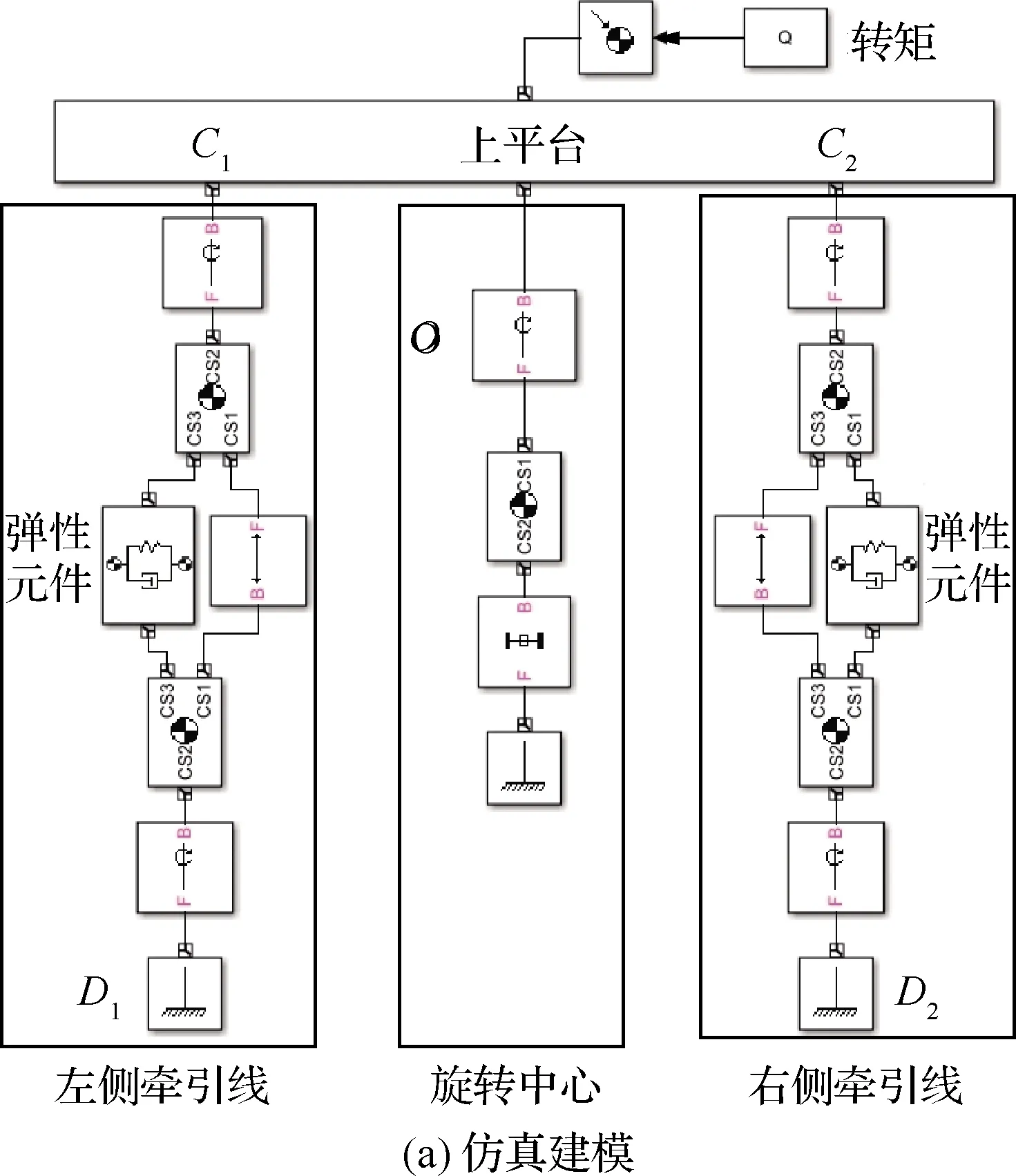
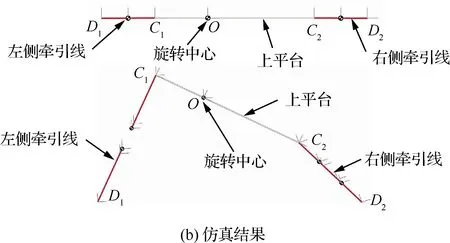
图11 扑翼扭转机构仿真模型Fig.11 Simulation model of rotating mechanism of flapping wing
变刚度扑翼的整体样机如图13所示,通过调节变刚度串联关节机构弹性元件的预张力可调节机构刚度,从而改变扑翼的整体扑动刚度。通过调节平面转动冗余并联机构弹性元件的预张力可改变机构的刚度,从而改变扑翼的扭转刚度。

图12 扑翼的扭转机构刚度随预张力变化Fig.12 Stiffness variation of rotating mechanism of flapping wing with pretension
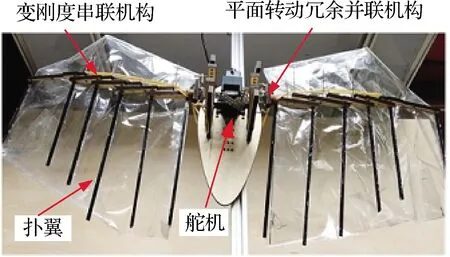
图13 变刚度扑翼样机Fig.13 Prototype of variable-stiffness flapping wing
变刚度扑翼的运动捕捉系统如图14所示,调节舵机驱动频率可使扑翼以不同频率扑动。在各个频率下,通过高速摄像头记录扑翼在一个周期内的扑动图像。捕捉得到扑翼一个周期的扑动序列图如图15所示,通过图像分析得到扑翼的实际扑动频率。
变刚度扑翼的气动力实验如图16所示,实验在风洞实验室中进行,变刚度扑翼样机安装在风洞平台上,风洞为扑翼样机提供气流均匀的相对空气流,以模拟飞行时的气流,实验风速为2.0 m/s。扑翼以不同的刚度和不同的频率扑动。扑翼在不同刚度和不同频率下的升力和推力通过风洞配套的六分力天平测得。
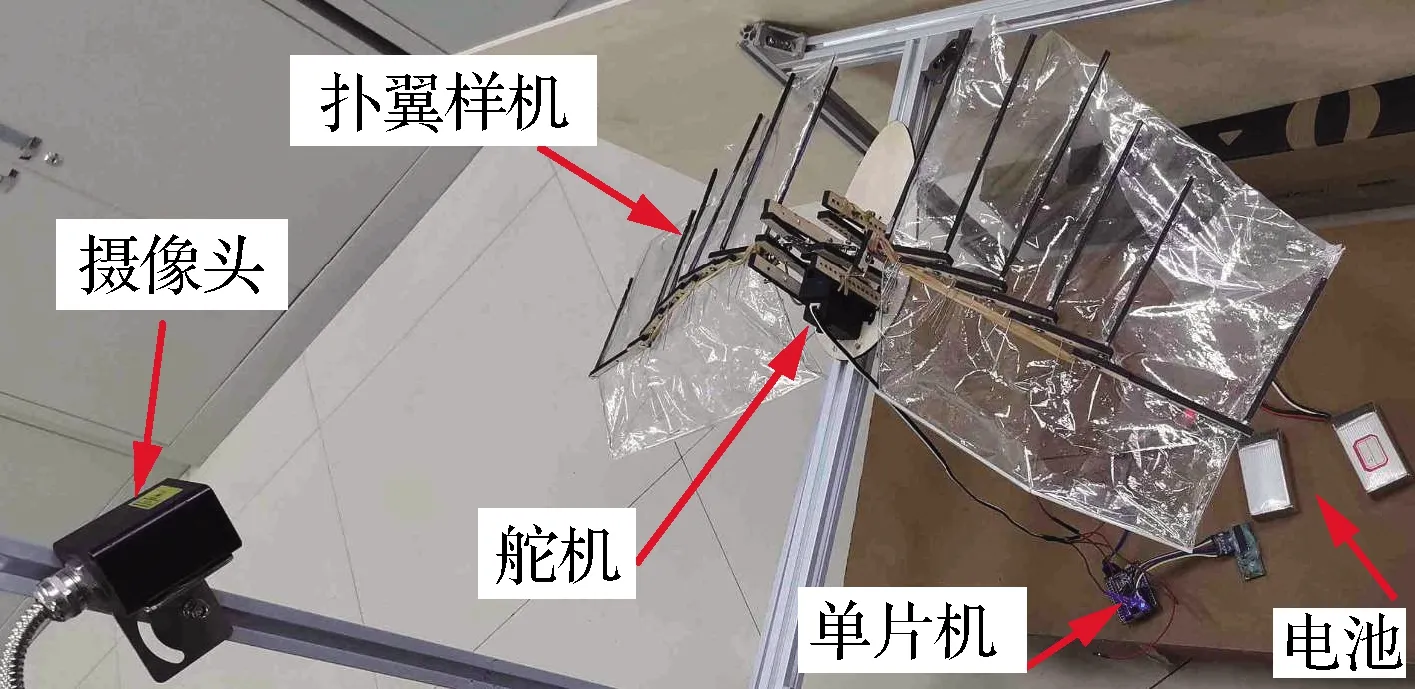
图14 运动捕捉系统Fig.14 Motion capture system
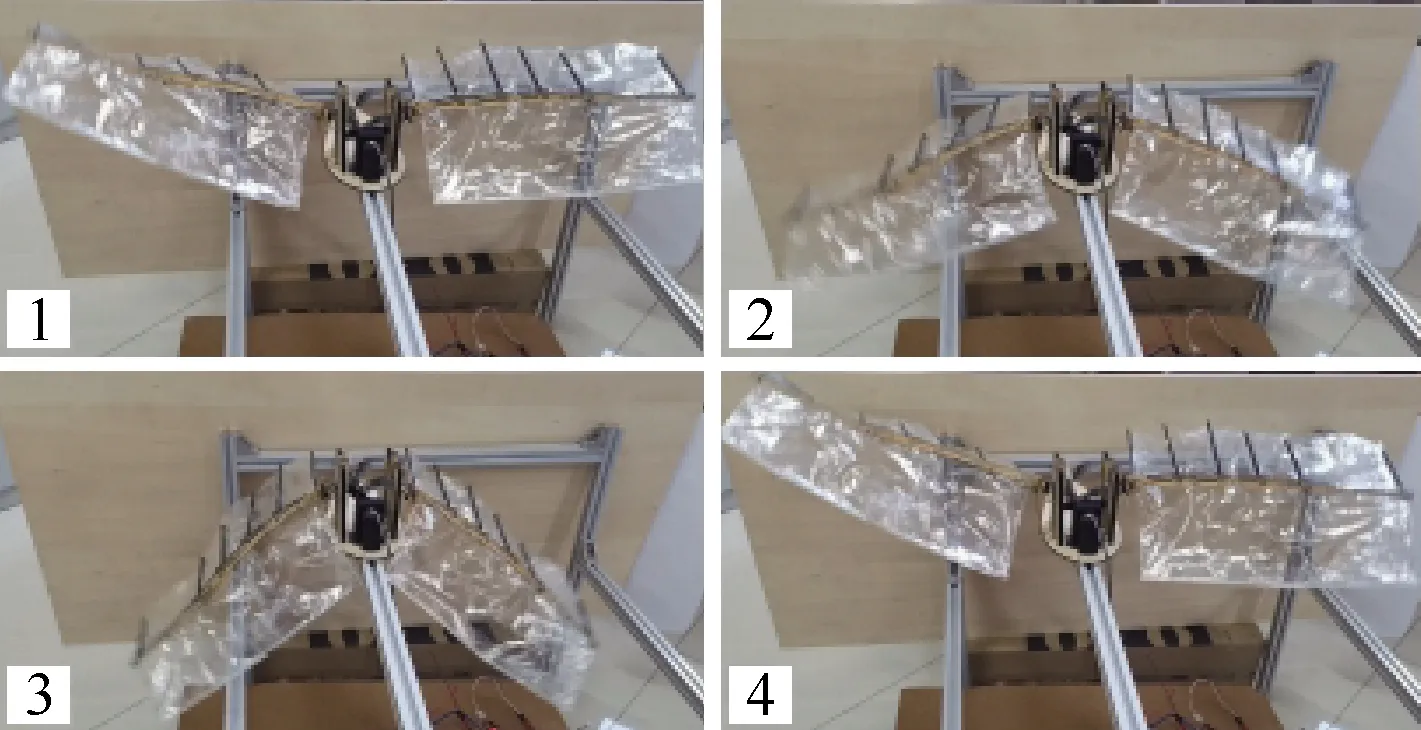
图15 扑翼一个周期的扑动序列图Fig.15 Wing flapping sequences during one cycle
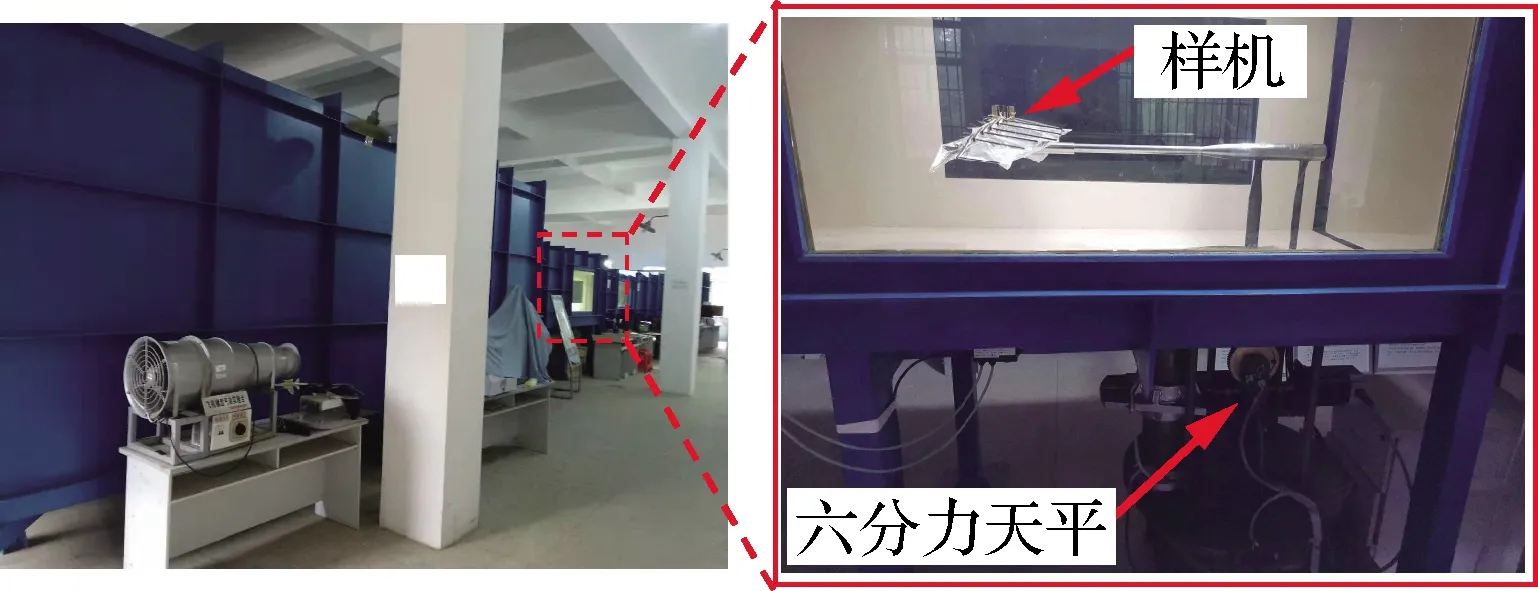
图16 变刚度扑翼气动力实验Fig.16 Aerodynamic experiment of variable-stiffness flapping wing
在扑动频率f为1.07 Hz、1.67 Hz、2.14 Hz、2.73 Hz和3.33 Hz时,扑翼最大升力随变刚度串联关节机构预张力的变化如图17所示,扑翼关节刚度随变刚度串联关节机构预张力的变化如图10所示。扑翼最大推力随平面转动冗余并联机构预张力的变化如图18所示,扑翼扭转机构的刚度随平面转动冗余并联机构预张力的变化如图12所示。通过调节预张力以改变扑翼扑动刚度,从而匹配驱动频率使升力达到峰值。通过调节平面转动冗余并联机构的预张力以改变扑翼扭转刚度,从而匹配驱动频率使扑翼推力达到峰值。由此可知,当扑翼的扑动刚度和扭转刚度分别匹配驱动频率时,升力和推力最大。
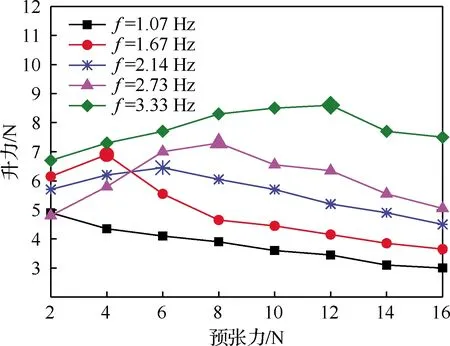
图17 升力随预张力变化Fig.17 Lift variation with pretension
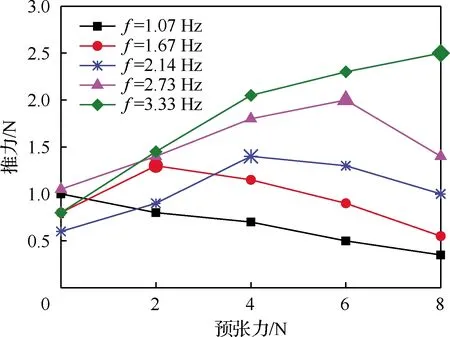
图18 推力随预张力变化Fig.18 Thrust variation with pretension
3 结 论
1) 扑翼的变刚度串联关节机构由4节变刚度关节相互串联组成,通过调节变刚度关节的转动刚度可改变扑翼的整体扑动刚度,通过调节平面转动冗余并联机构的转动刚度可调节扑翼的扭转刚度。
2) 得到了扑翼的扑动关节刚度和扭转机构刚度随预张力变化的模型,由此可知扑翼的关节刚度与预张力成正比,通过设计变刚度串联关节机构的几何参数可实现扑翼的刚度分布。
学生的习作若始终保持着幼年的童真童趣,那便是最好的习作。我们期待在习作中,学生能展现自己独特的个性和风格,在童言中抒真情,吐真意,擦亮习作的星空。
3) 搭建了扑翼的变刚度串联关节机构样机,由实验得到扑翼关节刚度随预张力的变化。搭建了扑翼的平面转动冗余并联机构的仿真模型,由仿真得到扑翼扭转机构的刚度随预张力的变化。同时通过实验得到了扑翼升力和推力随预张力的变化。实验表明,通过调节扑翼的刚度匹配扑翼的扑动频率,提高了扑翼的升力和推力。