基于TRF6900A的远程无线传感器系统设计
2020-11-25段宝峰周冬梅
吴 卫,段宝峰,周冬梅
(1. 兰州交通大学 实验管理中心,兰州 730070;2. 兰州交通大学 电子与信息工程学院,兰州 730070)
随着科学技术的发展,日常生活中离不开无线网络和无线通讯技术.市场上现有很多新兴的无线传输技术,如“nRF(nordic radio frequency,nRF)技术”和“蓝牙科技”,均以穿透性强,无方向性传输的特性,很快拥有了压倒性的优势[1].而nRF技术将基带处理和射频(radio frequency,RF)进行集成,自身拥有软件开发简易、功耗低、成本低、协议简单等特点,实现了真正的单片化,传输距离也达到了数百米.从开发成本的角度看,nRF技术也大大低于蓝牙科技[2-6].无线传感器的发展取决于无线传输技术的发展,但总体而言,其基本思路大致相同,采集信号大部分都是用微处理器来实现,再由无线模块进行传输.
本文系统主要采用TRF6900A射频芯片,频段为2.4 GHz,无线数据通信传输的控制采用CC2430单片机.该单片机接口设备具有很多优点,如设计简单、数据传输可靠、功耗低、成本低等[7].
1 无线传感器网络系统的特点
无线传感器系统有多种形式,且不同系统差异较大.但是,对于无线数据采集系统来说,如果想要让其具有良好的性能和齐全的配置,那么需要具有无线收发模块、传感器等[8].图1为无线数据采集系统.
如图1所示,该采集系统主要由两个部分组成,一是前端数据采集装置,二是主机.主机的主要作用是控制各前端装置(分机)进行数据采集,并针对采集到的数据进行显示和实时处理.当有数据需要在分机和主机之间进行传输时,需要使用nRF技术,即射频无线.该技术的工作方式是半双工方式,其通讯协议为ModBus.对GFSK(gauss frequency shift keying,GFSK)频率进行研究可知,其所在的频段为ISM(industrial scientific and medical,ISM)频段,无需申请即可在该频段工作.在工作时可以连接多个主机,不同的分机可以采集的数据路数为4路,在分机工作时,主机可以对其进行实时监控.该系统可以通过软件编程的方式对缓存容量及采集速度进行设定.此外,该系统还可以通过相关接口进行更新,以便实现系统升级.
2 系统总体方案的设计和论证
目前短距离无线传输技术和相关技术发展很快,诞生了很多新的技术,比如nRF技术、蓝牙、红外线传输IrDAdegn ,其中nRF并不是协议,但是其芯片应用较多,因此把其等同于是一种协议[9].但是nRF无法快速传输,没有较强的抗干扰能力,传输距离不长,因此本文在进行研究时剔除了该方案,仅分析和对比nRF和蓝牙,分析结果详见表1.
对表1进行研究和分析可知,无论是硬件设计还是接口方式等,蓝牙方案均要劣于nRF方案,因此,本文选择TRF6900A作为收发模块的核心芯片.
在表1中,传输距离的对比信息是芯片公司的研究结果[10].本文是根据芯片公司的研究结果对TRF6900A的通信距离进行的计算.

表1 蓝牙与nRF方案比较Tab.1 Comparison of bluetooth and nRF solutions
当空间中有电波在传输的时候,它的能量既不存在散射,也不存在反射,更不存在被障碍物吸收的情况[11].所以可以明确,数据在空间自由传输的距离受到工作频率、接收灵敏度和发射功率等的影响,因此可以对其进行定义,则有
Lfs=32.440+20lgd+20lgf.
(1)
式中:Lfs表示信号在空间中自由传播时产生的能量损耗,dB;d为传输距离,km;f为工作频率,MHz.
通过公式(1)可知,当信号在空间中自由传播时,会随着距离的增加而发生变化,如果传输距离增加一倍,或者工作频率增加一倍,那么就会导致能量损耗增加6 dB.
根据相关研究资料[12]可知,当工作频率为433.2 MHz,接受灵敏度为-100 dbm,发射功率为10 dBm时,利用公式(1)可得TRF6900A的理论通信距离为17.5 km.
需要明确的是,这种计算方式是以理想状态为基础进行的,在实际应用时,由于还存在很多其他因素,比如障碍物、大气等,均会对信号在空间中的传播距离造成影响,所以,可以在计算实际值时引入损耗计算公式,从而获得与实际情况比较接近的结果.
通过以上论述可以明确,使用TRF6900A不仅具有简便的接口、较长的传输距离,还具有较高的传输速率,因此符合本文所述设计系统的要求.
3 系统组成及工作原理
3.1 系统组成
本文的系统设计如图2所示.由主机和分机两个部分组成.图3所示为分机结构[13],主要包括射频功率放大器、无线收发模块、前级处理电路、传感器等.图4所示为主机结构,主要包括射频功率放大器、无线收发模块等.
3.2 工作原理
对于无线网络传感器,它的主机是在基于一个微控制器的框架下进行设计的,该微控制器是支持实时跟踪和仿真的32位ARM7TDMI-STMCPU平台,流水线技术使存储和处理系统的各个部分均能联系工作[14].CC2430时刻扫描按键状态,系统可以利用中断或者查询工作方式处理按键的状态,并对相应的功能进行执行,并用液晶将这个功能显示出来.当点击“选择采样分机”这一选项时,然后再点击“分机一”或“分机二”就可以给分机发送相应的控制命令,即ModBus(RTU),这时TRF6900A无线模块就会自动上电,同时控制命令数据包ModBus(RTU)会自动加上CRC校验码和前导码,然后被发送出去.对于分机中的无线收发模块(TRF6900A),则会不断的对空中信息进行监测,当TRF6900A的发射和接收频率相同时置高载波检测(CD),当TRF6900A接收到的地址被判定为有效地址时置高地址匹配(AM),当对TRF6900A接收到的数据包进行CRC校验的结果为正确,并且判定结果为有效时,CRC位和前导码地址会被TRF6900A去掉,当数据都准备就绪后,DR就会被置高,DR和AM两管脚通过查询均为高后,TRF6900A就会被MCU(CC2430)设置为standby模式,有效数据通过SPI接口以适当的速率被读出.一条ModBus(RTU)命令被完整的接收完之后,MCU(CC2430)会对这条命令进行处理,相应的功能然后被执行.
4 软件总体设计
4.1 发送部分
本文发送部分的流程如图5所示.这部分的循环总体思路为:先对DS18B20进行初始化,通过DS18B20读出对应的温度,并将温度值进行反码处理,再将反码转化成十进制码,将温度数组的高两位对应写入发送数据数组,然后对TRF6900A进行初始化处理,最后发送温度数值.
4.2 接收部分
图6为本文所述接收部分流程.对软件发射部分进行设计时,对nRF24L01进行初始化,然后对状态寄存器进行判断,查看其是否有接收中断.如果存在接收中断,则可以使用FIFO_buffer进行读取数据,并对其进行二进制处理,再对该数据进行十进制处理,然后在数码管上进行显示.
5 系统调试
对硬件进行调试的内容有:对各个器件是否正常工作进行调整,分析线路中是否存在短路、断路的情况并及时处置.处置的过程为:首先检查系统的所有元器件是否正常;然后对线路进行检查,查看其是否正确连接,同时还需要对是否存在短路等问题进行检查;最后使用万用表对其电源电压进行检测,查看其是否处于正常状态.
系统调试的内容有:首先,对无线收发模块TRF6900A进行检查,查看其是否处于正常工作状态,此时需要配置TRF6900A的寄存器,在TRF6900A中写入配置字,用其读取,然后对写进值和读出值进行对比,从而明确其是否处于配置成功状态;其次,对分机、主机的无线收发模块RF寄存器配置情况进行检查;接下来,给分机发送0~255码字,然后让主机进行接收,码字被主机接收后,再被发送给串口;最终数据的观察可以利用串口调试助手完成.但是如果数据无法被接收到,就需要对软件和硬件进行检查,然后再重复以上步骤,直到找出问题所在.如果可以接收数据,并且其数值符合范围,那么就可以认为分机和主机成功通讯.在进行编程操作时,需要对TRF6900A的模式切换时序给予重视,在编写时应该以数据手册中的时序为基础,否则可能会影响通讯.
在对主机和分机之间的通信进行调试时,当关闭主机再打开之后,出现分机无法和主机通讯的现象.对其进行检查之后发现,当关闭主机再打开之后,主机会随机发送一个数据,因此当主机再次给分机发送数据时就会导致命令出现移位,从而使主机无法与分机进行通讯.如果想要让该问题得到改善,就需要在分机中加一个定时中断.当分机接收到主机数据之后,立刻中断,可以把中断时间设定为1 s,在1 s之内,分机可以接收完主机发送的数据.如果在1 s时间内分机没有接收完主机数据,或者接收的是错误的主机数据,那么定时时间到后,就会对数据进行清零,从而使其能够接收下一次的数据.这样就可以解决这一现象.
6 无线电信号强度指示(RSSI)定位测试
本系统的定位实验是基于实验室的室内环境,参考节点的4个编号被指定为1,2,3和4,令其位置对应室内4个角落,取其形成的四边形坐标为:(10 m,11 m),(17 m,20 m),(10 m,20 m),(17.5 m,10 m).CC2431节点(即待定位节点)被放置在选定的4个节点中间的某个位置,考察定位的可靠性.文中只对待定位节点出现在(11 m,18 m)这个位置时的定位评估坐标进行了罗列,见表2.
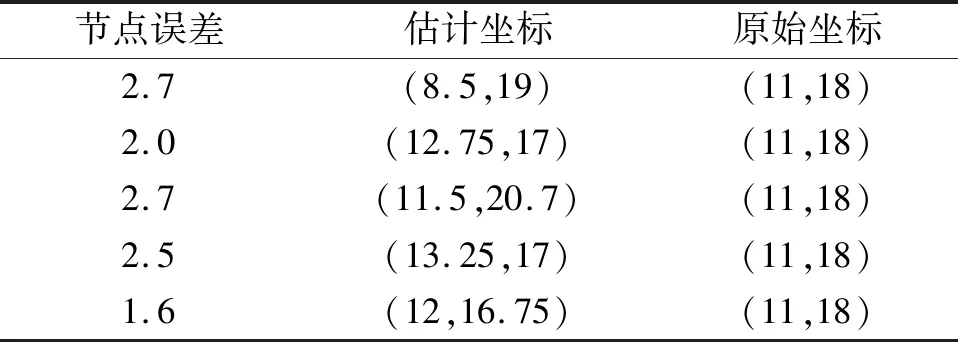
表2 定位结果一览表Tab.2 List of positioning results m
针对表2,通过估算待定位节点,可以让待测节点在网络中的位置得以体现,但是该方法的误差也是存在的,大约2.3 m.通过分析节点定位坐标,得知待定位节点的坐标有较大的跳动.通过综合分析可知,产生误差主要原因为:非视距传播影响RSSI测距,多路径效应影响RSSI测距.此外,室内环境情况也会对其产生影响,比如人员移动等,从而出现估算误差,有时产生的误差可能会超过房间范围.通常在理想状态下,各节点不存在硬件差异的问题,但由于存在各节点供电能量的不同和节点的硬件差别,导致了与待测节点距离相等时不同节点会接收到不同的RSSI值,从而导致估算位置出现的误差较大.
7 结论
本文设计了无线传感器网络的网络软件,主要是在软件层面设计了无线数据采集电路、无线发射电路、无线接收电路等.使用ARM/C语言完成了整个系统的软件设计及调试.根据研究方案,对总流程图进行设计,并设计相应程序,在完成集成之后对系统进行调试,从而对其结果进行验证.经过试验和数据的分析,详细优化了系统的一些不规范的地方.