褐菇无损采摘柔性手爪设计与试验
2020-11-24DENGYiming
卢 伟 王 鹏 王 玲 DENG Yiming
(1.南京农业大学工学院, 南京 210031; 2.江苏省现代设施农业技术与装备工程实验室, 南京 210031;3.密歇根州立大学工学院, 东兰辛 MI 48824)
0 引言
2016—2017年我国双孢蘑菇产量335万t,约占世界总产量的65%,并将持续增长[1]。褐菇是双孢蘑菇的一大变种,富含蛋白质、氨基酸和钾钙磷镁等微量元素,深受人们喜爱[2]。目前,褐菇主要通过工厂化生产,除采摘外均可实现自动化,在采摘环节仍采用人工选择性分级采摘方式,其劳动强度大、人力成本高,且容易导致风湿等职业病,严重影响了褐菇产业的发展,因此对褐菇采摘机器人的需求十分迫切[3]。褐菇采摘执行器直接决定了褐菇采摘的质量和市场售价,是褐菇采摘机器人设计中的关键环节[4]。
目前,果蔬采摘机器人末端执行器主要面向硬度较大、呈椭球形或圆柱形的果蔬[5-6],如番茄采摘机械手[7]、黄瓜抓持切割采摘机械手[8]、柑橘采摘夹持器[9]和芒果采摘柔性机械手[10]等。针对伞盖状蘑菇采摘的末端执行器研究较少,美国的CATHA[11]和VAN等[12]研制了通过刀片实现蘑菇收获的蘑菇收割机,但是刚性刀片采摘的蘑菇易受损伤和变色;REED等[13]研制的蘑菇采摘机器人利用波纹管硅胶吸盘的真空吸力吸附住菇盖并扭转,使根土分离,实现采摘,但由于褐菇柔软易损,且表面覆有黏液,在实际采摘时易造成打滑、菇盖破损及菇盖菇柄脱离[14]。柔性手爪因其柔软的材料而不易对果蔬造成机械损伤,为褐菇无损采摘提供了一种有效途径[15-16]。
本文首先分析褐菇生物学与力学特性,针对褐菇采摘过程建立褐菇无损采摘抓持力的约束条件,设计柔性手爪,建立抓取模型,进行柔性手爪的仿真和结构优化,最后对柔性手爪进行抓取试验验证。
1 褐菇生物学和力学特性分析
1.1 褐菇生物学特性
褐菇主体有菇盖和菇柄两部分,成熟后外表呈暗褐色,菇盖宽大呈半球形,直径可达10 cm,菇柄也十分粗壮,高度可达5 cm,菇盖内侧沿径向还有黑色菌丝,菇肉疏松肥厚,香味浓,口味鲜美[17]。
褐菇适宜采收时间一般在菇盖直径为8~10 cm时,此时菇盖与菇柄刚脱落并内卷,人工采摘使用手指紧贴菇盖外侧,轻旋使褐菇脱离土壤,再轻轻提起,用小刀平切菇柄,保持菇体洁净,轻放入采摘筐[18]。
1.2 褐菇力学特性
褐菇需测量的基本力学参数包括弹性模量、泊松比和褐菇与柔性材料的滑动摩擦因数等参数[19],用于褐菇的抓持建模和仿真分析。
在褐菇的弹性限度内,承受正向应力σ时产生正向应变ε,褐菇弹性模量E计算公式为
(1)
式中F——施加的外力
L——试样初始长度
S——试样初始横截面积
ΔL——在外力作用下的变形量
褐菇载荷垂直方向上的应变与载荷方向上的应变之比的负值定义为褐菇泊松比ν,可根据布森聂理论计算,计算公式为
(2)
式中r——压模半径
ΔD——物料变形量
滑动摩擦因数μ是衡量褐菇和柔性手爪间是否发生相对滑动的重要参数,只与接触面的粗糙度有关,计算公式为
(3)
式中T——摩擦力矩
Q——试样施加力
R——圆环柱体外半径
选取褐菇菇盖制作试样,使用TMS-PRO型质构仪(美国)和压模半径r=2 cm圆柱模进行压模试验,测量力-位移曲线。沿褐菇菇盖外侧径向裁剪试样,制作柔性材料的圆环柱体试样,外半径R=2 cm,采用M-2000型磨损试验机进行磨损试验。经多次试验测量取均值,计算得褐菇力学参数如表1所示。

表1 褐菇力学参数Tab.1 Mechanical parameters of brown mushroom
1.3 抓持力约束方程
本文设计的采摘柔性手爪为n指圆周均布排列,因此仅需分析单个柔性手指,建模分析褐菇抓持和旋转受力过程如图1所示,图中f′和f分别为单个手指与褐菇在水平方向和竖直方向的静摩擦力,fn和fz分别为菇柄和土壤之间扭转的作用力和反作用力,N为单指抓持力,fx为单指和褐菇间在水平方向的扭转力。

图1 褐菇采摘受力分析图Fig.1 Picking force analysis of brown mushroom
根据实际采摘经验,针对褐菇的生物学特性,褐菇采摘实现菇柄与土壤脱离主要有两种方案:拔断式和扭断式,拔断式在成功抓持褐菇后向上提起拔断褐菇,扭断式在成功抓持褐菇后水平旋转扭断褐菇。
拔断式抓持时为实现拔断采摘并且不损伤褐菇结构,约束式为
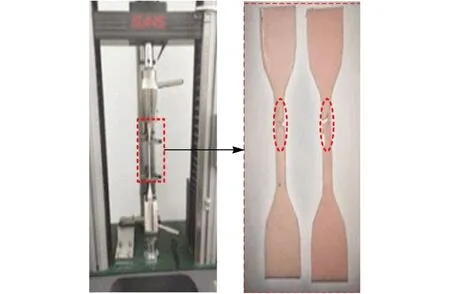
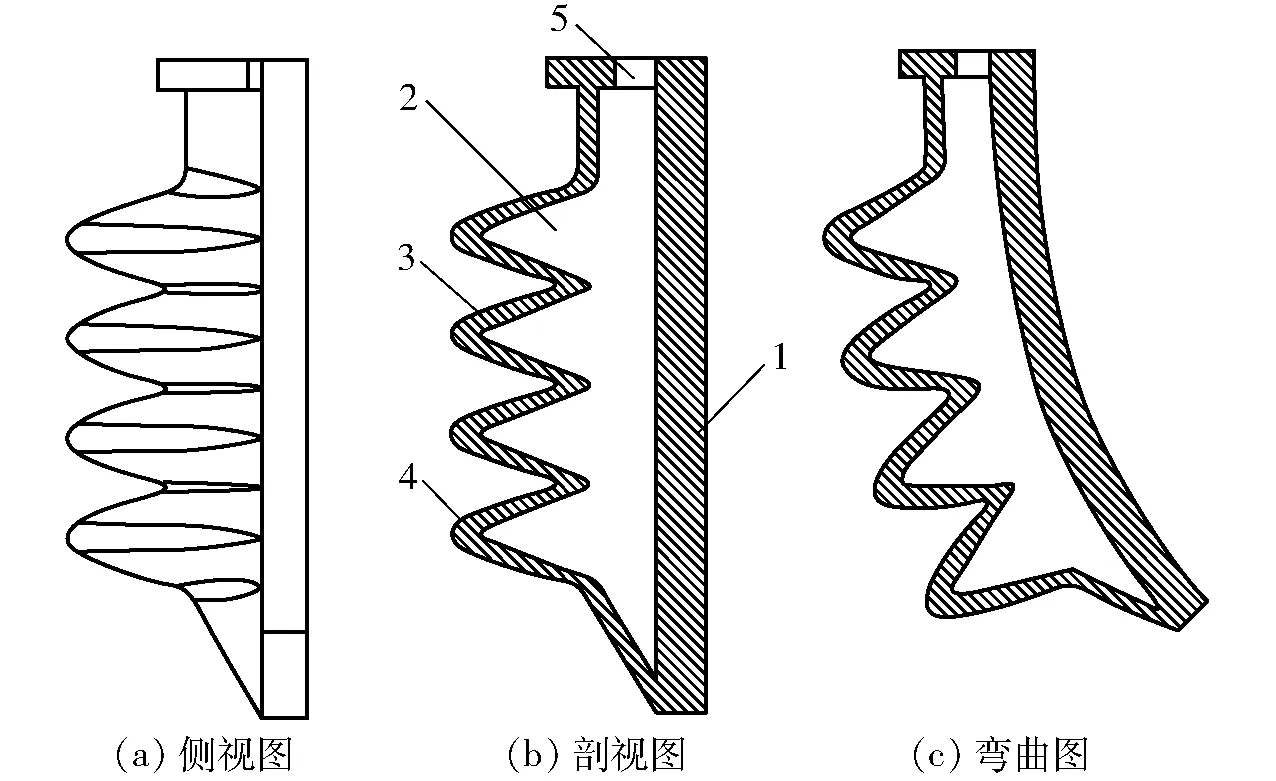
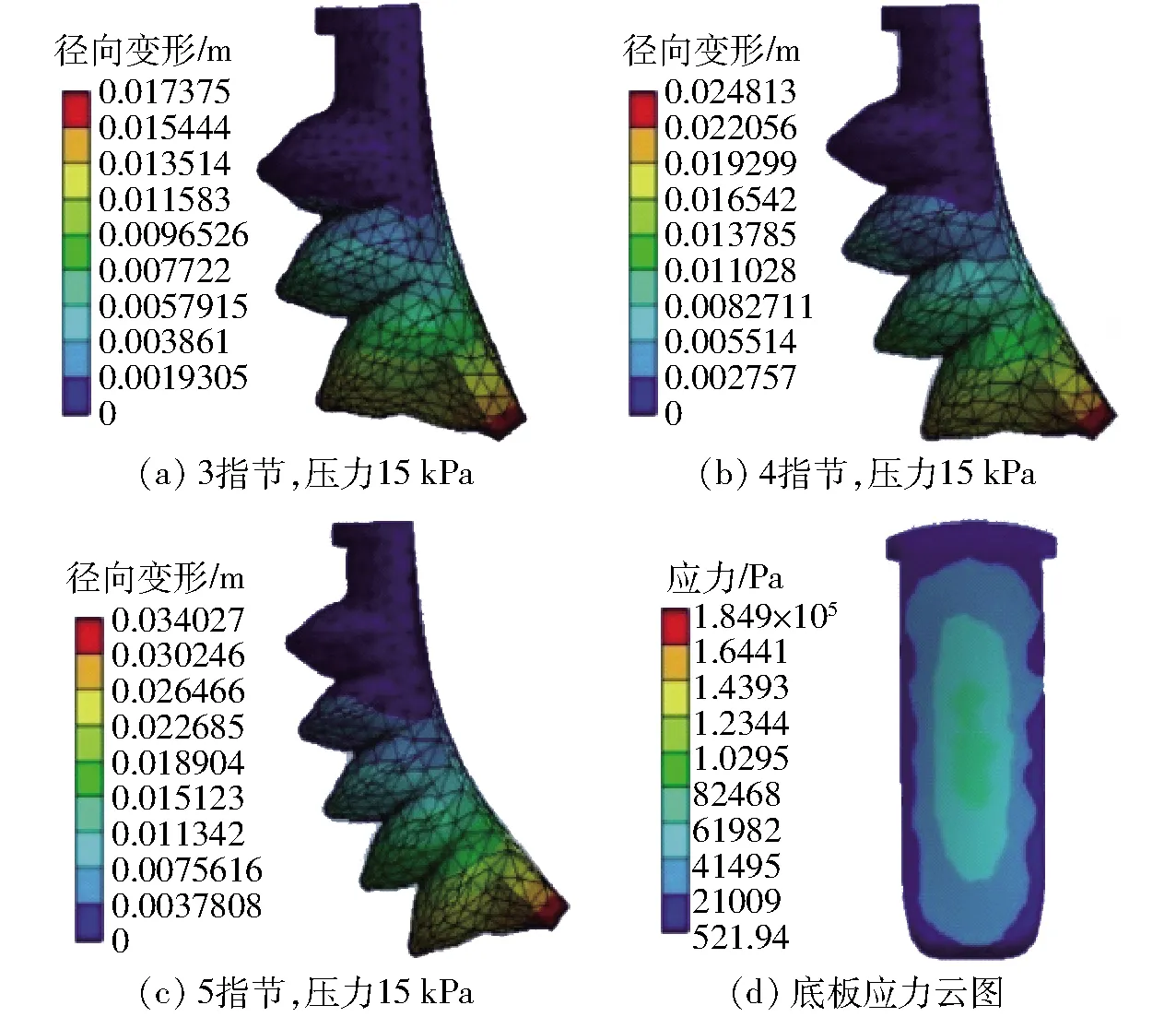
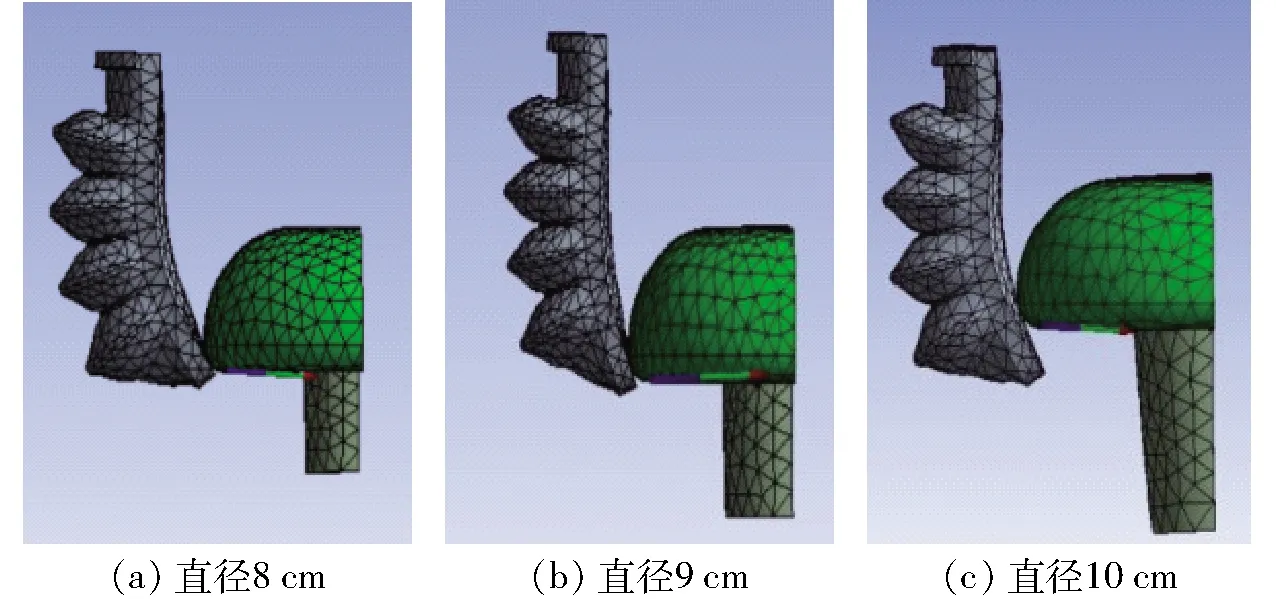
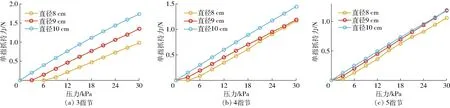
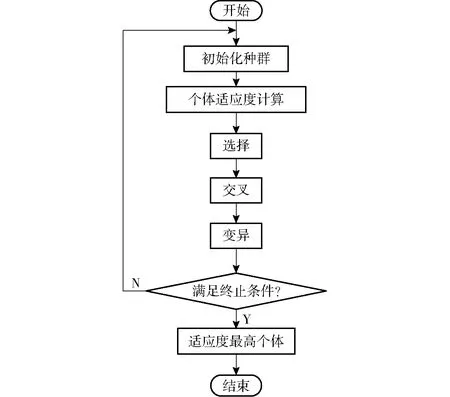
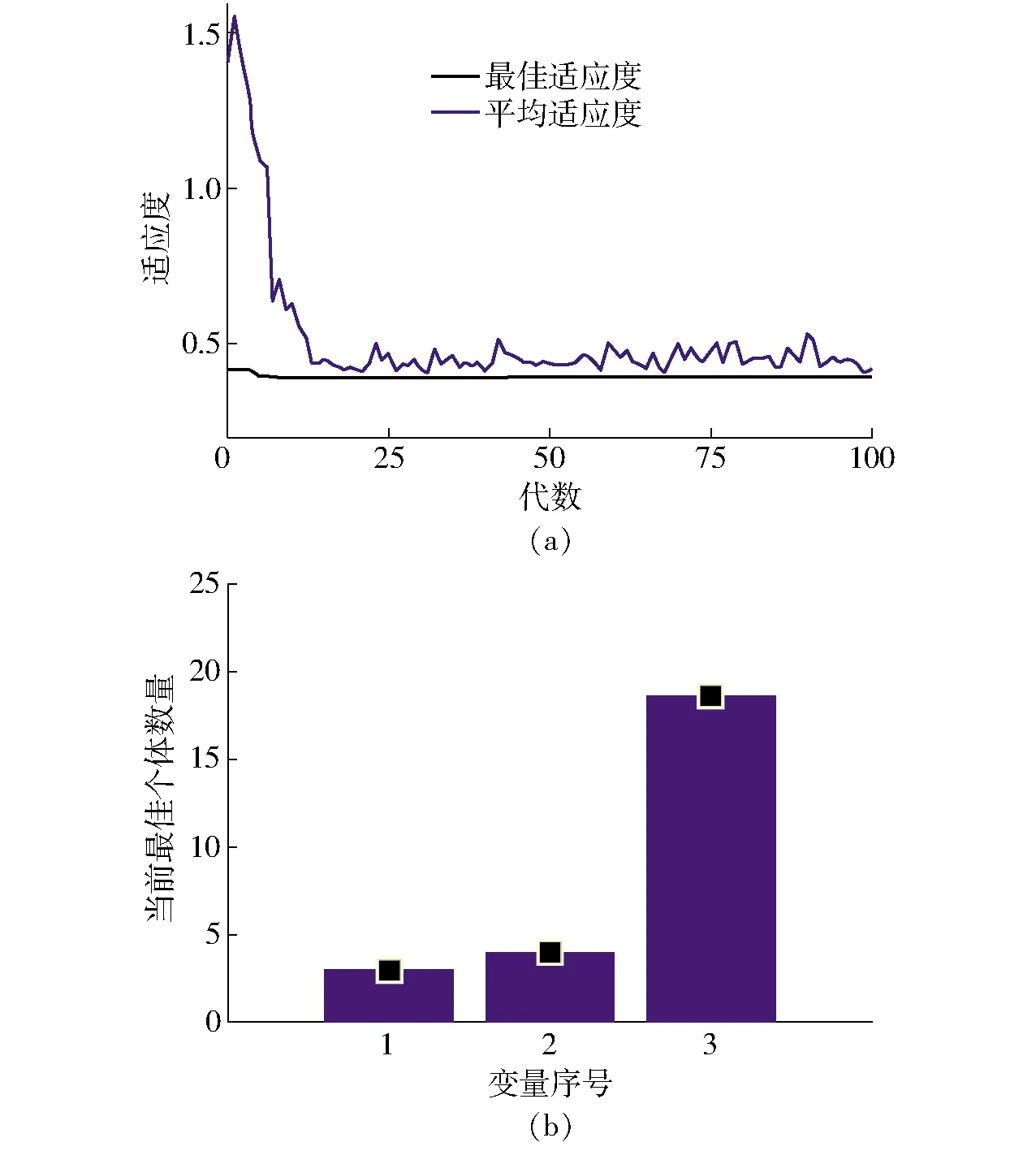
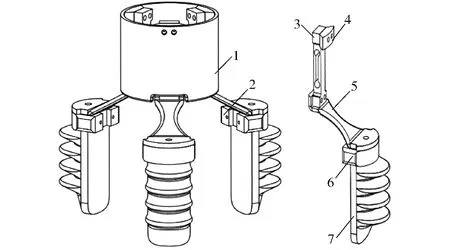
fg (4) 式中fb——拔断式拉力 即拔断式抓持力Nm1的约束式为 (5) 扭断式抓持时为实现采摘并且避免菇盖破裂,扭断式抓持力Nm2约束式为 (6) 扭断式旋转时,采摘手爪旋转褐菇产生的扭矩需达到土壤菇柄分离扭矩才能实现采摘,同时扭矩需小于菇盖菇柄分离扭矩以防蘑菇损伤,因此扭断式抓持力Nm2约束式为 (7) 式中d——褐菇直径 参照表1,由式(5)~(7)可得拔断式抓持力Nm1为1.9~5 N,扭断式抓持力Nm2为1~6 N,拔断式抓持力相对于扭断式约大0.9 N,且抓持褐菇时更易造成破坏,因此选用扭断式进行褐菇采摘。 假设抓持力考虑一定可靠性,抓持力Nm约束式为 (8) 代入得 2 N (9) 对于等圆周排列的指数为n的采摘手爪,单指抓持力N约束方程为 (10) 柔性手爪采摘褐菇的基础是产生定向的大变形,柔性材料须拥有良好的弹性性能,本文参考国内外柔性手爪制作材料[20-22],选用Smooth On公司硅胶制作柔性手爪,首先对柔性材料进行参数建模,利用有限元分析优化柔性手爪结构。 在使用有限元方法进行力学分析时,硅橡胶材料在受力过程中具有非线性特性及各向同性、不可压缩的超弹性特征,因此需要建立材料的本构模型[23],在实际工程应用中,橡胶材料发生大变形情况下多采用Yeoh两参数模型进行求解[24-26],应变能计算公式为 W=C10(I1-3)+C20(I2-3)2 (11) 式中W——应变能 I1、I2——应变不变量 C10、C20——材料常数 式(11)中仅需求C10和C20,可结合单轴拉伸试验获取拉伸应力σ和拉伸比λ的曲线,通过曲线斜率和截距计算C10和C20,σ、λ、C10和C20的关系式为 (12) 柔性材料建模过程如图2所示,根据国标GB/T 528—92制作硅胶的哑铃型试样,使用CMT6104型万能试验机进行拉伸试验,断裂时裂口在窄段中间,说明本次试验有效。利用直线拟合两者关系,结合式(12),计算得C10=0.154,C20=0.013 3。 图2 柔性材料弹性参数测试Fig.2 Flexible parameters testing of soft material 现有的柔性手指主要为圆柱形、指形,大多是采用多气道或者不同材料才能实现定向变形,手指的设计和控制难度较大[27-29]。本文面向褐菇采摘设计时考虑了3方面:①柔性手指可实现某方向的定向大变形。②单材料单气道可实现手指正反向变形的效果。③柔性手指结构参数易调整。 图3 柔性手指结构图Fig.3 Flexible finger structure diagram1.底板 2.气道 3.指面 4.V形指节 5.通气孔 本文设计的多指节柔性手指如图3所示,柔性手指包括指面和底板,两者之间形成气道,指侧由多个V形指节串接而成,指跟的端面设置有通气孔,通气孔与手指进气气管固装连通。 柔性手指底板宽26 mm,壁厚6 mm,底板壁厚为指面壁厚两倍,气泵通过气管伸进气道提供指定压力。类似气动人工肌肉驱动原理[30],当气道内压力变化时,首先发生形变的是壁厚最薄的指面部分,进而带动底板的弯曲形变。当压力增大,指面膨胀,挤压底板向远离指面弯曲,此时产生径向位移,手指可贴合抓取褐菇菇盖。 将手指SoildWorks模型导入Workbench静力学模块,定义柔性材料时使用Yeoh两参数模型,设定C10=0.154,C20=0.013 3,密度为1.08 g/cm3,施加15 kPa压力,打开大变形开关,后处理沿径向方向选取Directional Deformation模块,对3指节、4指节、5指节手指进行静力学仿真,如图4所示手指有良好的正向弯曲性能,可产生径向大变形。 改变施加的正向压力值,得到3指节、4指节、5指节手指的压力-径向位移曲线如图5所示。可以发现径向位移与压力呈较好的线性关系,3指节、4指节、5指节手指分别于4.87、7.55、13.52 kPa时达到2 cm的径向位移,可适用于采摘8~10 cm的褐菇。 图4 压力15 kPa时不同指节数柔性手指静力学仿真结果Fig.4 Simulation of flexible gripper with different numbers of knuckle at pressure 15 kPa 图5 不同指节数柔性手指压力-径向位移曲线Fig.5 Pressure-radial offset curves of flexible gripper with different numbers of knuckles 由图4可见,正压弯曲时手爪底板边缘应力较小,从边缘到中间应力逐渐变大,因此使用底板边缘上侧接触褐菇可以产生较大的抓持力。在柔性手爪抓取褐菇的过程中,褐菇直径、柔性手爪指数、指节数和压力均可作为变量,影响抓持力,柔性手爪要求在某压力范围内实现直径8~10 cm褐菇的通用采摘。 在Workbench中仿真时褐菇弹性模量和泊松比等参数参照表1设置,褐菇和柔性手爪间设置球形接触,后处理将褐菇和柔性手指的接触面设置Force Reaction观测两者间作用力的大小和方向,采用静力学模块进行仿真。调整手指和褐菇的相对位置,使得仿真后手指抓持褐菇的受力方向为近似水平方向,观测Force Reaction选项返回的作用力大小,4指节柔性手指以15 kPa压力抓持3种尺寸的褐菇的单指仿真结果如图6所示,测得抓持力分别为0.482、0.584、0.747 N。 图6 抓持多尺寸褐菇仿真结果Fig.6 Grasp simulation of multi-size brown mushroom 针对3指节、4指节、5指节柔性手指对应直径8、9、10 cm褐菇的9个过程进行仿真试验,气压在0~30 kPa之间,间隔3 kPa取值,测试抓持力,每个过程完成10次仿真,对应10个抓持力数据,共完成了90次仿真,对应90个抓持力,数据由后处理模块的Force Reaction选项提供,整理数据得到关系曲线如图7所示。 结果表明,当柔性手指指数和褐菇直径确定后,单指抓持力与气压呈线性关系,对数据进行拟合,抓持力Nm计算式为 图7 多指节柔性手指采摘多尺寸褐菇单指抓持力-压力曲线Fig.7 Single finger clamping pressure-pressure curve of brown mushroom with different sizes (13) 式中m——指节数 通过柔性手爪采摘褐菇的仿真拟合数据,对柔性手爪进行结构优化[31-32],手爪优化目标为:①柔性手爪可以实现在某压力下对3种尺寸的褐菇实现通用采摘,抓持力均在约束范围内。②基于轻量化和减少成本的考虑,在满足功能前提下材料花费尽量少。③基于节约能源、减少成本和提高手指动态特性的考虑,在满足功能的前提下,柔性手爪的控制压力尽量小。 对柔性手爪的结构优化过程进行建模,优化变量为柔性手爪的手指数n、柔性手指的指节数m和柔性手爪控制压力p,变量约束条件为 (14) 式中Nmnpd——n指m指节柔性手爪施加压力p采摘直径d褐菇时的抓持力 对柔性手爪的结构优化考虑材料成本C和控制压力p,在SoildWorks中对n指m指节柔性手爪测量,质量为n(3m+17)。 对材料成本和压力做归一化处理,表达式为 (15) (16) 取两者平方和作为需要优化为最小的目标评价函数,表达式为 (17) 评价函数为混合整数非线性规划(Mixed integer nonlinear programming,MINLP),可采用遗传算法求最优解,遗传算法是计算数学中用于解决最佳化的搜索算法,借鉴了进化生物学中的一些现象而发展起来的,包括遗传、突变、自然选择以及杂交等现象[33-34],其主要步骤如图8所示。采用Matlab的optimization tool工具箱进行求解,选用遗传算法genetic algorithm 模型,因为默认为求最小值所以设置适应度函数为式(13),设置3个变量(m,n,p),边界条件为Lower[3;3;0]和Upper[5;5;30],结合式(13)、(16)输入非线性约束条件,并设置n、m为整数,options模块中设置种族大小为100,设置精英数目和后代交叉比例为10和0.75,设置相应的停止条件,最大进化代数为100,求解结果如图9所示。 图8 遗传算法流程图Fig.8 Flow chart of genetic algorithm 图9 遗传算法优化结果Fig.9 Optimization result of genetic algorithm 当遗传代数增加至25代后,平均适应度逐渐减小并趋向于最优适应度,即群体中通过交叉、变异、自然选择后最优个体数目越来越多,对应于最优适应度的最优个体的变量属性为[3,4,18.65],因此遗传算法优化的结果为n=3,m=4,p=18.65 kPa,对应研制3指4指节的柔性手爪,以18.65 kPa的控制气压抓持不同尺寸的褐菇为综合最优结果。 参考现有的果蔬采摘柔性手爪的结构[35-39],在结构优化结果的基础上设计了一款等圆周3指排列的4指节柔性手爪,其硬件结构如图10所示。柔性手爪采用自顶向下的扭断采摘方式,工作时可产生大形变,自适应接触贴合褐菇表面形成一定的包络面,以较小的抓持力产生较大的摩擦力来可靠抓取褐菇,且不易对褐菇造成损伤。 图10 柔性手爪硬件结构图Fig.10 Hardware structure diagram of flexible gripper1.手掌 2.柔性手指模块 3.力传感器 4.垫块 5.力传感器连接件 6.C形连接件 7.4指节柔性手指 柔性手爪包括手掌和3个柔性手指模块。手掌为圆柱薄壳,一面开口另一面封闭,封闭面设置有同心均布的安装孔。柔性手指模块包括垫块、力传感器、力传感器连接件、C形连接件、4指节柔性手指,柔性手指模块穿过安装孔并通过垫块固装于手掌的内壁,3个柔性手指同心圆直径为10 cm,力传感器可对4指节柔性手指的水平受力进行测量。 柔性手爪的气压控制系统包括气路和电路两部分,如图11所示,气路的功能是提供稳定的正向气压,电路的功能为控制气路的通断,控制正向压力并与上位机通信。 图11 柔性手爪的气压控制系统结构框图Fig.11 Pneumatic control system of flexible gripper 气路包括气泵、电气比例阀、缓冲气瓶、通断控制电磁阀和四通快速接头,相互连通并通过气管连接柔性手爪通气孔,其中气泵用来产生正向气压使柔性手指发生径向位移,比例阀用来调节气压,电磁阀控制气路通断,气路断开则手爪恢复初态,缓冲气瓶可缓解气压的瞬间冲击以稳定气压,四通快速接头和气管则作为气压控制的气道。 电路包括气压控制电路微处理器、继电器、D/A转换模块、无线通信模块、气压传感器,继电器控制电磁阀通断,D/A转换模块控制比例阀开度,气压传感器的气压输入口与四通快速接头连通用于实时测量气压,三者接入气压控制电路微处理器,通信模块连接气压控制电路微处理器和上位机,由上位机设置和控制气压。 3D打印手指模具、10 cm直径手掌及连接键等,使用浇筑模具法制作四指节手指,结合力传感器、气管等组装成3指柔性手爪,连接气泵、电气比例阀、缓冲气瓶、控制通断电磁阀、继电器、气压控制电路微处理器等,完成柔性手爪的气压控制系统,整体实物图如图12所示。 图12 3指4指节柔性手爪及气压控制系统Fig.12 Flexible gripper with three fingers and four knuckles and air pressure control equipment1.气泵 2.电气比例阀 3.缓冲气瓶 4.气管 5.四通快速接头 6.气压控制电路微处理器 7.继电器 8.通断控制电磁阀 9.3指4指节柔性手爪 以扬州奥吉特生物科技有限公司生产的褐菇作为抓取试样进行试验,施加气压18.65 kPa控制3指4指节柔性手爪,对比刚性3指手爪对褐菇进行采摘试验的损伤情况,如图13所示,对褐菇菇盖抓取处表面沿径向取样,厚度为5 mm,将柔性手爪和刚性手爪采摘的试样放置在显微镜下观察,可以发现柔性手爪采摘试样表面有规则纹理排列,而刚性手爪采摘试样表面破损产生暗痕且表面纹理丧失。柔性手爪采摘后褐菇表面无损伤,微观结构未被破坏,采摘效果符合要求。对比试验采用5组直径分别为8、8.5、9、9.5、10 cm的褐菇,每组褐菇数量为20个,10个用于柔性抓持,10个用于对比试验的刚性抓持,共10组试验,样本数量共100个。 图13 刚柔手爪褐菇采摘对比试验Fig.13 Contrast experiments of brown mushroom picking using rigid and soft claws 每组试验记录这组试验使用的褐菇直径,记录采摘手爪的10个抓持力的数据,剔除个别异常数据,计算试验抓持力的最大值、最小值和平均值。 基于试验数据绘制柔性和刚性手爪采摘褐菇时抓持力-褐菇直径的区间图,如图13所示,柔性手爪抓取褐菇力为(2.4±0.3)N,抓持力在无损抓持力范围内,而刚性手爪成功抓取力为(5.6±0.7)N,这是由于刚性手爪和褐菇的滑动摩擦因数较小,约为柔性手爪和褐菇的滑动摩擦因数的1/2,因此需要更大的抓持力才能成功抓持,但过大的抓取力造成了褐菇的损伤,而设计的柔性手爪仅用较小的抓持力即可实现褐菇的无损采摘。 (1)针对直径8~10 cm褐菇自动化无损采摘问题,首先分析了褐菇的生物学特性和力学特性,根据抓持力约束方程优选出扭断式采摘方法;通过对设计的柔性手指进行有限元仿真分析,给出指数、指节数、褐菇直径、气压与抓持力之间的函数关系,建立评价函数,并通过遗传算法优选出3指4指节的柔性手爪结构,以及18.65 kPa的最优抓持控制气压。 (2)设计了3指4指节柔性手爪结构以及气压控制系统,并进行褐菇采摘试验。结果表明,与刚性手爪相比,柔性手爪抓持力减小,为(2.4±0.3)N;设计的3指4指节柔性手爪可实现褐菇的自动化无损采摘,而刚性手爪采摘蘑菇的抓握处切面5 mm深度内均有损伤,且表面抓痕明显。说明所设计的3指4指节柔性手爪适于褐菇的自动化无损采摘。
2 柔性手爪静力学仿真及结构优化
2.1 柔性材料建模
2.2 多指节柔性手指设计及仿真

2.3 柔性手爪采摘褐菇仿真

2.4 基于遗传算法的柔性手爪结构优化
3 柔性手爪设计
3.1 柔性手爪结构设计
3.2 柔性手爪气压控制系统设计

4 试验
4.1 柔性手爪制作

4.2 柔性手爪和刚性手爪褐菇抓取对比试验

5 结论
