便携式手外骨骼康复装置结构研究
2017-06-29
(东北大学,辽宁 沈阳 110819)
便携式手外骨骼康复装置结构研究
肖锴,周一方,张璞,雒佳,杨建宇
(东北大学,辽宁 沈阳 110819)
本文针对当下手外骨骼康复装置的研究现状及其装置体积重量过大、灵活性差、康复性差、实用性差、应用价值小等缺点,提出了一种全新设计的机械结构的手部外骨骼康复装置的食指部分的结构。先对手部外骨骼的研究背景、研究意义展开讨论,接着介绍此版手部外骨骼的机械结构,最后简要的介绍外骨骼的驱动电路的设计。
中风患者;手部外骨骼;康复装置
我国脑中风患者约有3/4的病人在不同程度上失去了劳动和生活自理能力。现今的康复办法为由康复医师对患者实施康复疗法,造成了康复成本昂贵,人力资源短缺等问题。所以开发一款手部外骨骼来协助患者的康复变得越来越重要。康复性手部外骨骼的出现将会为广大的中风患者提供巨大的帮助。
手部外骨骼的研究始于20世纪90年代,现已有多种手部外骨骼结构方案。Andreas Wege和他的同事开发了一款连杆机构的手部外骨骼,但是这种结构仍存在体积过大,运动笨拙精度不高等缺点。Xun Luo及他的同事开发了一套用增强现实来帮助康复的手部外骨骼,但其控制精度值得进一步论证且结构欠缺实用性。Satoshi Ito及他的同事开发了一款固定式手部外骨骼,虽然机械性能可靠,但是其便携性及实用性仍有差距。Vishalini Bundhoo及他的同事开发了一款以记忆弹簧为驱动器的线驱外骨骼,虽然大大减少了结构的尺寸,但是装置的输出功率及精度却仍有待提升。
本文针对上述问题提出了一种以电机齿轮驱动为主体配合优化的耦合方案为结构的新型手部外骨骼。本文先介绍了此种外骨骼的结构组成及结构原理。然后又对结构进行了运动学仿真分析并讨论了仿真分析的结论及实用性。下面具体的讨论这种新型的手部外骨骼康复装置的方案。
1 结构原理(图1)
本文设计的手部外骨骼装置的组成部分为食指第一指节,食指第二指节,食指第三指节,手背上固定的导轨及导轨上支撑的第三指节驱动滑块,分别固定在第三指节电机固定槽里的二级电机与固定在第三指节驱动滑块里的一级电机,主从耦合带轮之间的钢丝及松紧带。食指第三指节由电机固定槽,一级耦合驱动轮组成。食指第一指节上包含次级耦合驱动轮,食指第二指节上包含第二指节驱动齿轮。
第三指节的一级耦合驱动轮与第二指节之间由铆钉连接形成转动副,第二指节驱动齿轮与第三指节之间由铆钉连接形成转动副;第一指节上的次级耦合驱动轮与第二指节指节铆钉连接形成转动副,第一指节连接孔与第二指节连接孔由铆钉连接形成转动副;第三指节与推杆之间形成铆钉连接转动副,推杆与第三指节驱动滑块之间形成铆钉连接转动副,滑块与导轨之间形成滑动副,导轨通过固定装置固定在手背上。
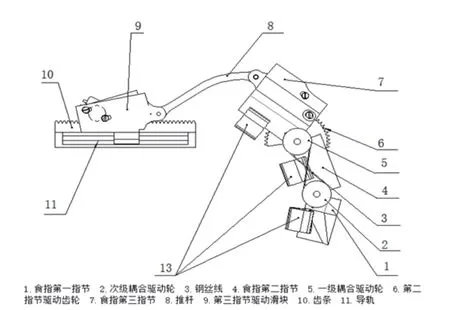
图1 结构原理图
固定在第三指节驱动滑块电机固定槽里的电机通过控制系统控制通电转动,电机输出轴上的圆柱形齿轮与齿条啮合并传递动力,驱动整个滑块前后运动。滑块的前后运动推动或拉动推杆的运动,推杆拉动或者推动食指第三指节。第三指节上的松紧带致力于使手指第三指节与外骨骼第三指节之间的缝隙变化不超过允许值,否则会影响机构的运动效果。
第三指节电机固定槽里的电机通过控制电路控制通电转动,输出轴上的圆柱齿轮与第二指节驱动齿轮相啮合,通过电机的转动带动驱动齿轮的转动。由于驱动齿轮与第二指节是固定的,所以驱动齿轮的转动直接驱动第二指节的转动。第二指节的转动通过耦合装置将动力传递到第一指节,导致第一指节随动,完成了对第一指节的驱动。
整个手部外骨骼装置在控制电路的统一协调下,完成近似正常手部运动的运动轨迹,对于佩戴此手部外骨骼的患手进行驱动,完成康复动作。
2 运动学仿真分析
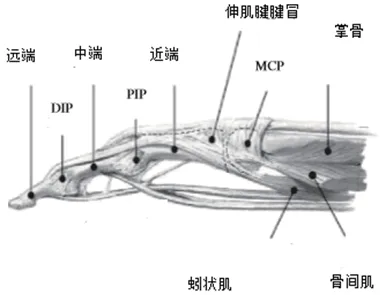
图2 人手生理结构图
人手生理结构图见图2。
根据Janyu Yang及其同事的工作,我们拥有了手指动作的函数。如式(1)与(2)所示。

其中在公式(1)中x代表MCP转动角度,y代表PIP转动角度。在公式(2)中u代表PIP转动角度,v代表DIP转动角度。上述公式是由上述团队把角度传感器装置佩戴到正常人的手上后进行了11次抓握并进行相关数学计算后得出的优化解。
表1中列出了所涉及的符号及其相关含义以及对应的数值,以下内容均以表1为基础展开。
如图3所示,考虑了零件形状,滑块推进时对指套产生的翻转力矩等因素后,该装置的预想效果是电机驱动滑块从C运动至E,使手指从水平位置移动到数值位置,即运动了90°。
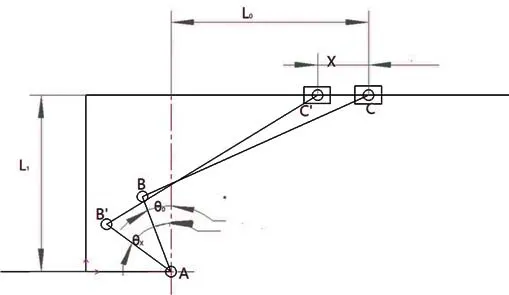
图3 第三指节运动简图

表1 相关符号及其物理意义及数值
根据机构的几何形状及其几何关系可以推导出第三指节的运动学方程如(3)所示。

由于第一指节与第二指节之间存在耦合驱动关系,且DIP第一指节关节与PIP第二指节关节之间的耦合驱动轮半径之比为1:1.4。由此可知第一指节转动角度与第二指节转动角度之间成线性关系。如图4所示,即为耦合装置的实物图。耦合装置由两个成一定比例的驱动线轮及钢丝组成。钢丝缠绕在驱动线轮上并保持一定的预紧力,以此达到耦合驱动的目的。
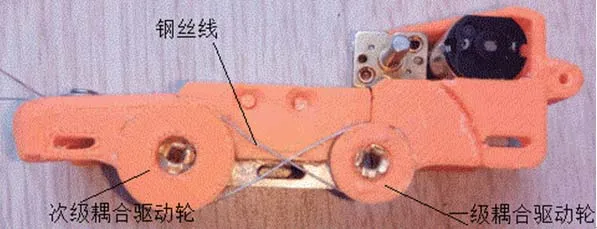
图4 第一指节与第二指节间耦合驱动结构图
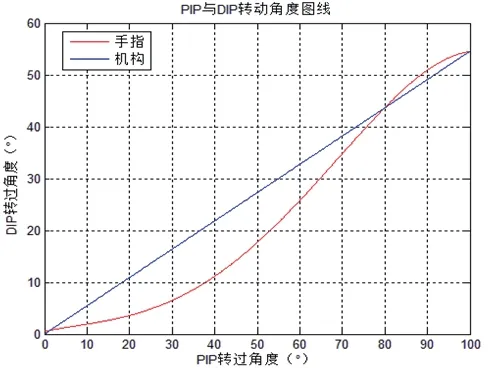
图5 PIP与DIP间的仿真曲线
真实的手部的运动经过安装角度传感器后进行抓握伸展等动作后,得出手指各个关节之间的角度关系,这个关系可以用一个函数进行表示。图5中的红色曲线代表真实手指的PIP关节与DIP关节之间的角度关系。为使装置实现手指的伸展与弯曲,手掌的抓握等功能,且赋予研究更加严谨的科学性,使用了MATLAB进行装置的运动学仿真。第三指节转动角度与滑块的运动距离间的仿真关系如图6,第一指节与第二指节之间的转动角度之间的仿真关系如图6。通过提取仿真曲线上的数据可获得完成一次手指弯曲时的各个关节及滑块的运动角度及运动距离数据。据图可以看出,机构的运动曲线趋近于真实手指的运动曲线,曲线间的误差处于可信区间之内。所以可以判定,本文讨论的手部外骨骼装置可以完成康复手部运动的功能。
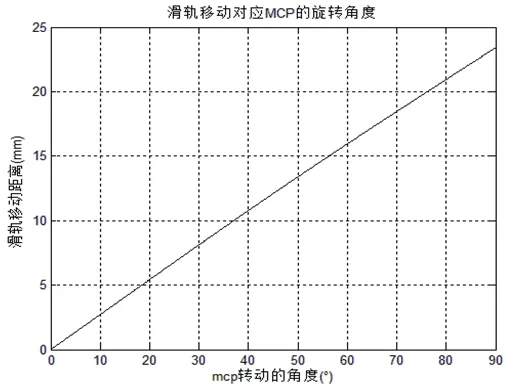
图6 MCP第三指节与滑块间的仿真曲线
3 结语
本文为了达到帮助中风患者治疗手部残疾的目的,研究开发了一款手部外骨骼装置,该装置可以通过松紧带等部件固定于手部佩戴以实现帮助患手实现反复抓握的动作。本文对该装置进行了机构分析,运动仿真等研究工作。分析与实验结果表明,该装置能有效实现预期目标。
[1]甘增康.手部功能康复机器人电气控制系统的设计与研究[J].哈尔滨工业大学,2011, 6.
[2]Andreas Wege, Konstantin Kondak, and GUnter Hommel :Mechanical Design and Motion Control of a Hand Exoskeleton for Rehabilitation,Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls,Canada.July 2005 .
[3]Xun Luo, Tiffany Kline, Heidi C. Fischer, Kathy A. Stubblefield, Robert V. Kenyon, Derek G. Kampe:Integration of Augmented Reality and Assistive Devices for Post-Stroke Hand Opening Rehabilitation,Proceedings of the 2005 IEEE Engineering in Medicine and Biology 27th Annual Conference Shanghai, China, September 1-4, 2005.
[4]Satoshi Ito, Yasuhiko Ishigure, Satoshi Ueki, Jun Mizumoto,Yutaka Nishimoto, Motoyuki Abe, Haruhisa Kawasaki:A hand rehabilitation support system with improvements based on clinical practices,Preprints of the 9th International Symposium on Robot Control (SYROCO’09) The International Federation of Automatic Control Nagaragawa Convention Center, Gifu, Japan, September 9-12, 2009.
[5]Vishalini Bundhoo, Edmund Haslam, Benjamin Birch and Edward J. Park :A shape memory alloy-based tendon-driven actuation system for biomimetic artifcial fngers, part I: design and evaluation ,Robotica (2009) volume 27, pp. 131–146.
[6]Vishalini Bundhoo, Edmund Haslam, Benjamin Birch, Edward J. Park, A shape memory alloy-based tendon-driven actuation system for biomimetic artifcialfngers,partI:designandevaluation,R obotica27(01)(2009)131–146.
[7]JianyuYang,HualongXie,JiashunShi :A novel motion-coupling design for a jointless tendon-driven finger exoskeleton for rehabilitation .

R469
:A
:1671-0711(2017)06(上)-0080-03
本文研究工作得到自然基金(N51505072)的资助。
