一种快门式水下武器隔水阀曲线槽设计
2020-11-16谭庆,李强,贺超
谭 庆,李 强,贺 超
(1.湖南国防工业职业技术学院,湖南 湘潭 411207;2.中北大学 机电工程学院,山西 太原 030051)
随着特种作战蛙人活动的增加,水下反蛙人武器的重要性日趋凸显[1-4]。依靠动能杀伤目标的身管武器是目前较为廉价的水下反蛙人武器。水的黏性阻力为空气的100倍,一方面,弹丸在水中运动时会受到极大的阻力,使弹丸的动能迅速衰减;另一方面,高速运动的弹丸在与水接触时,弹丸膛内运动姿态会受到干扰,严重时会引起身管炸膛。为避免身管武器在水下发射时身管内部进水,引起炸膛,需在身管口部增加可靠的阻水装置。对阻水装置有3个基本要求:
1)无发射任务时,即使在无动力输入状态下,也能可靠地将海水阻隔在身管外。
2)在发射中和发射间隔,阻水装置要使进入身管内部的海水尽可能少。
3)运动构件间摩擦力要尽可能小,减少磨损和卡滞。
解决该问题的一种方法是在身管口部加水密隔膜,弹丸运动到身管口部击穿隔膜再入水,这种方法密封可靠,但只能一次性使用。另一种方法是在身管前端加一个绕身管纵轴高速旋转的空化发生器,将进入空化发生器的海水迅速排出,在身管前端形成一个无水空腔,这种方法的优点是响应速度快,缺点是耗能高,且只有达到较高转速时排水效果才显著,但由于水的黏性阻力较大,很难做到较高的转速。
笔者在前人研究的基础上,设计了一种在身管前端增加一个由长时阻水阀和短时隔水阀构成的阻水装置,提出了一种在隔水阀开合过程中低摩擦阻力的驱动曲线槽设计方法。
1 工作原理
阻水装置结构示意图如图1所示。阻水装置由阻水筒、上盖板、输入齿轮1、步进电机1、过渡齿轮、球型阀、步进电机2、输入齿轮2、曲线导引板、百叶板、斜导引板、连接柱、水泵1和水泵2等构成。阻水筒为焊接件,内筒和外筒之间形成蓄水腔2,内筒、外筒、球形阀和隔水阀一起构成蓄水腔1,内筒与外筒通过侧向的小孔联通。阻水筒与身管通过断隔螺纹进行连接。
球形阀的功能为在无发射任务时,确保海水不会涌入膛内;隔水阀的功能为确保在发射间隙阻止海水涌入膛内。
隔水阀结构简图如图2所示,斜导引板通过螺钉和连接柱与阻水筒固定连接。曲线导引板通过轴承套接在阻水筒上。12块百叶板的矩形凸起与斜导引板矩形直线导槽相配合,曲线导引板的导引曲线槽与百叶板上的圆柱形凸起配合,当曲线导引板绕隔水阀轴心转动时,曲线槽带动百叶板沿斜导引板上的矩形直线导槽滑动,以控制隔水阀的开合。
2 曲线槽数学模型的建立
曲线槽是隔水阀的关键结构,对机构运动的平稳性和可靠性起着决定性作用[5-10]。为了分析百叶板、斜导引板和曲线导引板之间的受力关系,建立了图3所示的简化模型。
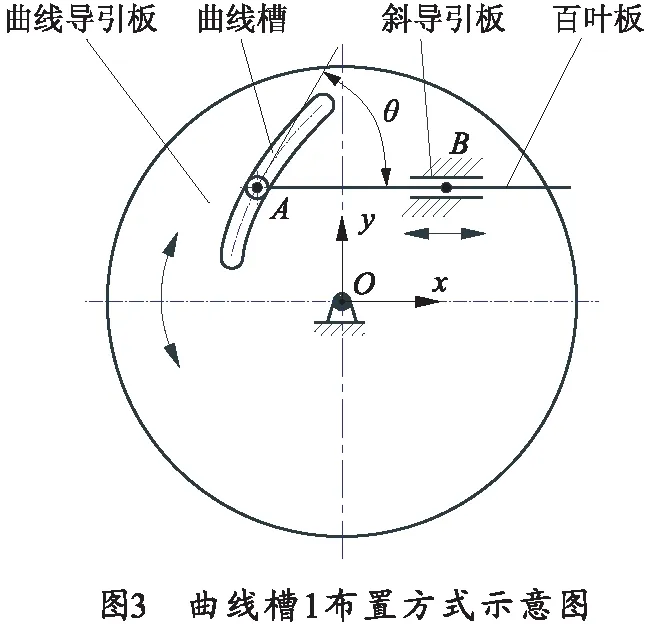
对百叶板进行受力分析,如图4所示,O1-xyz坐标系的坐标轴与矩形凸起的相应棱边相平行,O1点与矩形凸起棱边的中点重合;Fn1为曲线导引板施加给百叶板的推力;Fn2和Fn3为斜导引板施加给百叶板的法向力;f1为百叶板与曲线导引板件摩擦力;f2和f3为斜导引板施加给百叶板的摩擦力,θ为Fn1与xO1z平面的最小夹角。百叶板在沿x方向上的力:
Fx=Fn1cosθ+f1sinθ-f2-f3=
Fn1cosθ+μFn1sinθ-μFn2-μFn3.
(1)
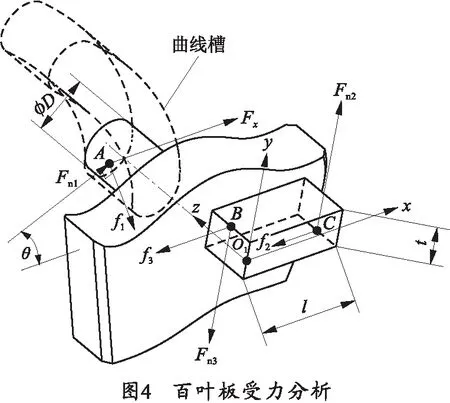
当Fn1的方向与X轴平行且在xO1z平面上时,Fn1在y方向上的分力为0,Fn2和Fn3的值最小,亦即百叶板受到的沿滑动方向的阻力f2和f3最小。因此,曲线槽应优化为一条在与百叶板圆柱凸起接触的推点处曲线法线与x轴平行且在xO1z平面。
曲线求取原理如图5所示。将曲线等分成长度ΔC的微小线段。以圆点O为起点,在y轴上作线段OA0,长度记为R0;以A0为起点,在y轴上作微线段A0B0,长度记为ΔC,记OB0长度为R1.以R1为半径作圆1,记过A0点,且与x轴平行的直线与圆1的交点记为A1,以A1为起点,平行于y轴作长度为ΔC的微线段A1B1,记OB1长度为R2.以R2为半径作圆2,记过A0点,且与x轴平行的直线与圆2的交点记为A2,以A2为起点,平行于y轴作长度为ΔC的微线段A2B2,记OB2长度为R3,以此类推,得到一系列的点簇A0,A1,…,An.
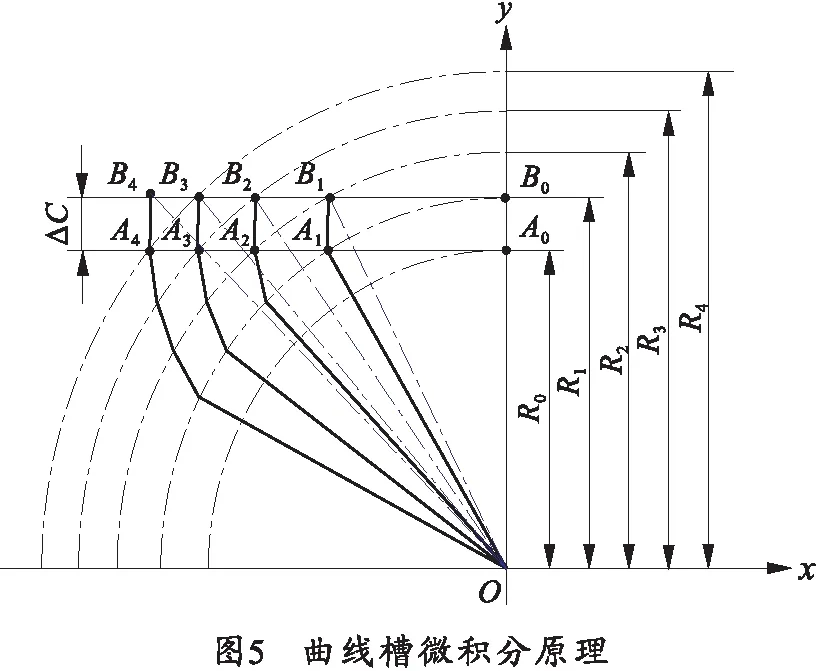
选择微分曲线而不是微分转动角度的原因是,距离圆心不同距离,相同转角对应的弧长会有较大差异,在离圆心较远处,求解出的曲线误差较大[6]。
通过几何分析可知:
OA0=R0,
(2)
R1=OB0=OA0+ΔC=R0+ΔC,
(3)
(4)
(5)
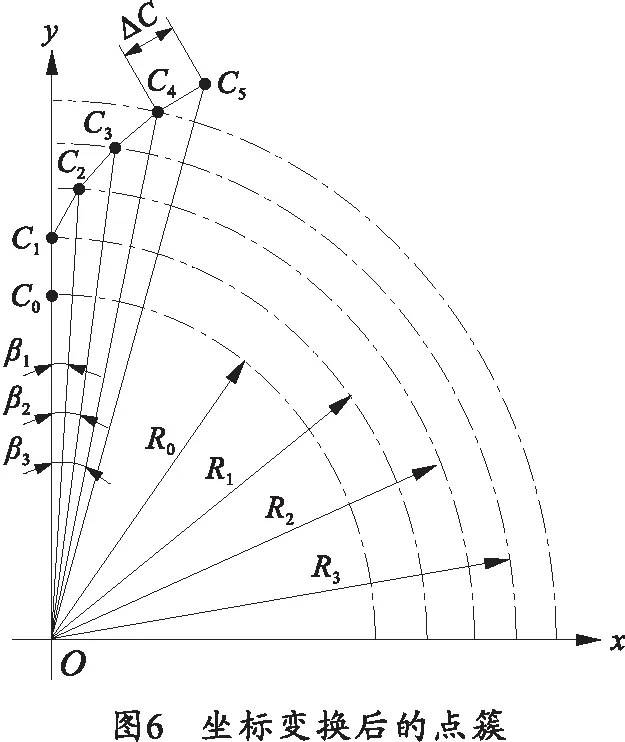
将构造得到的点簇进行坐标变换,以圆心O为中心,使圆心O与曲线起始点所连直线转动角度θ与y轴对齐,得到图6所示的点簇,当ΔC足够小时,点簇所拟合得到的曲线即为所求。记∠C1OC2=β1,∠C1OC3=β2,∠C1OC4=β3,…,∠C1OCn+1=βn.
归纳后,可得到迭代式:
(6)
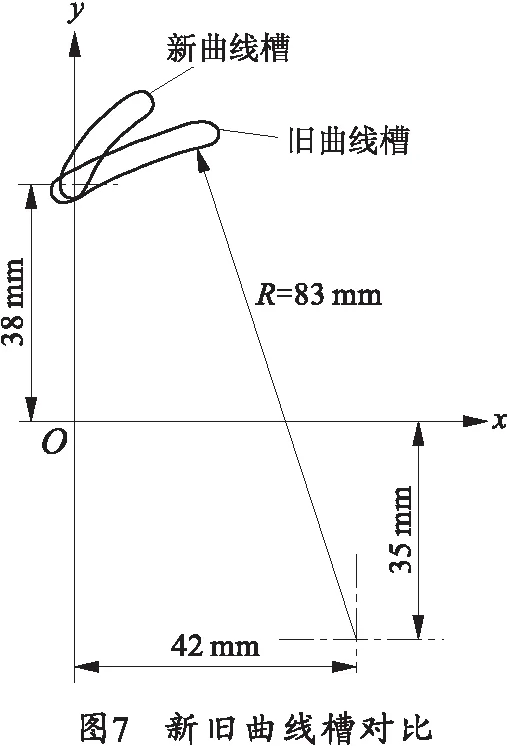
对迭代式赋初值,受空间布局、尺寸和结构强度限制取R0=38 mm,得到拟合公式,根据结构布局,建立了图7所示的曲线槽。
y=-0.002 4x4+0.058 4x3-0.539 3x2+
3.265 6x+38.49,x∈(0,10).
(7)
3 多刚体动力学仿真分析
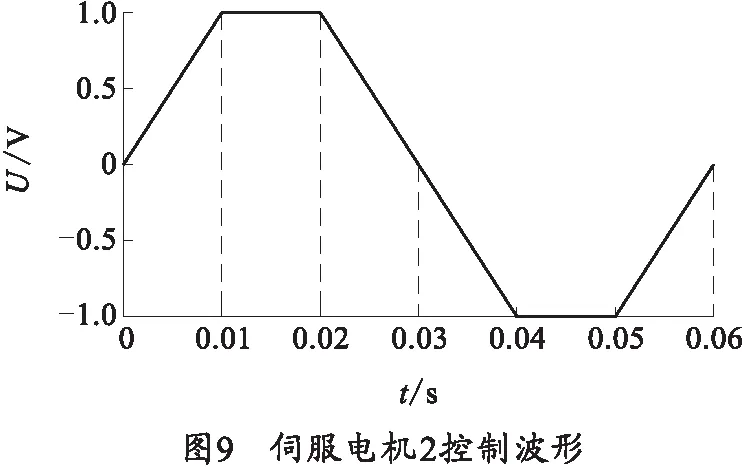
建立如图8所示的仿真模型,对机构进行动力学仿真分析。对两两接触的零件施加接触约束,静摩擦系数设置为0.1,动摩擦系数设置为0.05.对步进电机2施加如图9所示的控制波形,伺服电机到达额定转速时,曲线导引板转速为30 r/min.

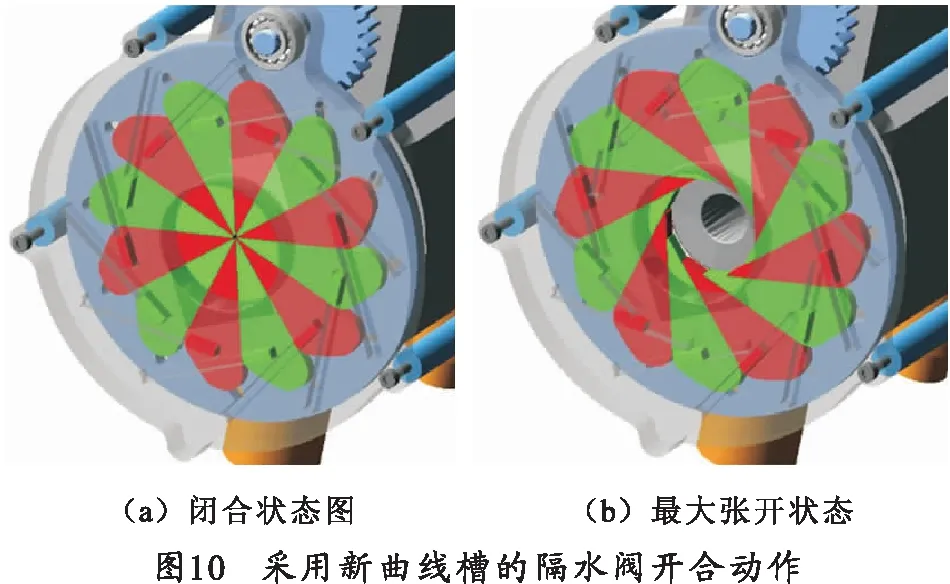
采用新曲线槽的隔水阀开合动作如图10所示。仿真结果表明,新旧结构运动动作均流畅可靠。
如图11、12所示,采用了新的导引曲线槽后,百叶板与斜导引板接触力最大峰值为11 N,仅为原有结构的9%;百叶板间接触力最大峰值为7 N,与原有结构相当。结果表明,新设计的曲线槽,有效地减小了百叶板与斜导引板之间的摩擦力,减少了机构间磨损,有利于提高机构运动的可靠性和安全性。


4 结束语
笔者在前人研究的基础上,提出了一种水下身管武器阻水装置的设计方案,并对隔水阀开合曲线槽进行了详细设计。应用动力学仿真软件进行仿真,证明该曲线槽在原理上是可行的,使用了新曲线槽的机构,机构间接触力较小,有利于增强机构运动的可靠性和安全性。
