动车组横向半主动悬挂模糊天棚控制研究*
2020-11-11许文天梁树林池茂儒孙帮成齐洪峰闫一凡于子良
许文天,梁树林,池茂儒,孙帮成,齐洪峰,闫一凡,于子良
(1 西南交通大学 牵引动力国家重点实验室,成都 610031;2 中车工业研究院有限公司,北京 100070)
由于动车组服役环境的复杂性以及车辆参数随着运营里程的时变特性等因素,使得车辆表现出来对环境适应能力有所不足,提升车辆悬挂参数适应能力的需求越来越迫切,另一方面由于列车轮轨关系、悬挂元件的强非线性特性,获得十分准确的车辆动力学模型是比较困难的,人们按照理想模型设计的各种理想控制方法无法在实际应用中得到良好的效果。对此,通过在半主动控制中引入模糊控制可以很好的解决此类问题。
天棚阻尼控制原理计算车体需要的期望阻尼力,即用与车体横向振动速度成比例的阻尼力来抑制车体的横向振动,控制策略上可以分为开关控制和连续控制两种。从控制方法上看,开关控制速度快,但是容易发生阻尼值的跳变,连续天棚控制效果好,但易受系统时滞影响,实际工程应用中实现难度较大[1-3]。针对以上问题,将模糊控制引入天棚阻尼半主动控制中,一方面比开关型控制又多分了几个档次,另一方面又不像连续性控制对系统时滞敏感,从而结合了两者的优点,实现对高速列车车体横向平稳性的半主动控制。
1 横向半主动悬挂模型建立
列车横向半主动悬挂系统考虑将车体与转向架之间的二系横向减振器替换为阻尼可调减振器,尽管影响车体横向振动的有横移、摇头和侧滚3个自由度,但考虑车辆半主动控制结构、成本、可靠性等因素,系统只在车体对应转向架中心位置和构架中心各安装一个速度传感器,对车体和构架横向振动进行测量。
为了实现各种半主动控制算法的仿真分析与性能评价,需要对控制系统的输入、输出等环节建立合理的数学模型。陈春俊等[4]分别对半主动悬挂系统按:被控对象(车辆动力学系统),输入通道(传感器、低通滤波器、积分器),输出通道(可调阻尼器、控制卡、驱动放大器)3部分分别建模。
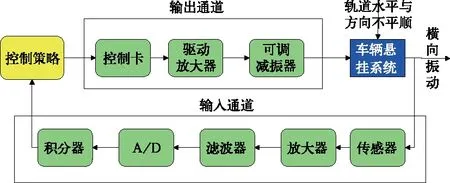
图1 半主动悬挂结构图
1.1 7自由度横向半车体模型
由于较“软”的二系悬挂系统,前后转向架之间的耦合作用较弱,所以可以采用横向半车体模型研究半主动悬挂控制形式,7自由度半车体模型只考虑轨道横向不平顺引起的前后轮对的横移与摇头、构架横移与摇头和车体横移运动,如图2所示。

图2 7自由度车辆横向半车体模型
考虑简化的7自由度横向半车体模型,只考虑轨道的方向不平顺引起前后轮对的横移与摇头、构架和车体横移运动,并建立考虑自旋蠕滑率的线性轮轨蠕滑力,其微分方程为式(1)~式(5):轮对微分方程(i=1,2)为:
2kpy[ywi-(yb-(-1)iψba)]-
2kny[(ywi+(-1)iψwin2)-(yb-(-1)iψbn1)]
(1)
2kpxb2(ψwi-ψb)+(-1)i-12knyn2·
[(ywi+(-1)iψwin2)-(yb-(-1)iψbn1)]
(2)
构架微分方程为:
mbb=-2kpy(yb-yw1)-2kpy(yb-yw2)-
(3)
2kpya(aψb-yw1)-2kpya(aψb+yw2)-
2knyn1[(yb+ψbn1)-(yw1-ψw1n2)]+
2knyn1[(yb-ψbn1)-(yw2+ψw2n2)]-
(4)
车体微分方程为:
(5)
可调阻尼减振器阻尼力为式(6):
(6)


1.2 输入输出通道
半主动控制系统输入通道由传感器、电压放大器、低通滤波器组成,可调开度减振器系统输出通道由运动控制卡模型、驱动放大模型、步进电机模型和可调减振器模型组成,具体模型推导及最终的减振器总的数学模型见参考文献[4]。
1.3 轨道不平顺信号模拟
列车行驶过程中,轨道空间域随机不平顺信号将被转化为时域不平顺信号。分别选择武广高铁客运专线(设计350 km/h)与秦沈线(设计250 km/h)实测轨道不平顺作为仿真的激励输入。所模拟的列车以速度250 km/h通过线路。通过对轨道谱的方向不平顺激励进行插值以输入轮轨激扰。

图3 武广高铁与秦沈线轨道方向不平顺
2 模糊天棚阻尼控制

2.1 模糊天棚阻尼控制原理

(7)
式中,PA、PB、PC、PD、PE和PF表示将阻尼值分成的由小到大的7模糊子集。csky表示天棚阻尼系数;cmin为阻尼最小值;cmax为阻尼最大值。
2.2 模糊语言变量的确定
2.3 模糊天棚阻尼隶属函数的设置
各模糊状态的隶属函数一般选择对称三角形、对称梯形、正态形隶属函数。因为三角形隶属函数运算较简单,所占内存空间也较小,比较适合于运算量较大、比较复杂的模型[5]。在此选择各变量的隶属函数为三角形隶属函数。各变量的隶属函数如图4所示:
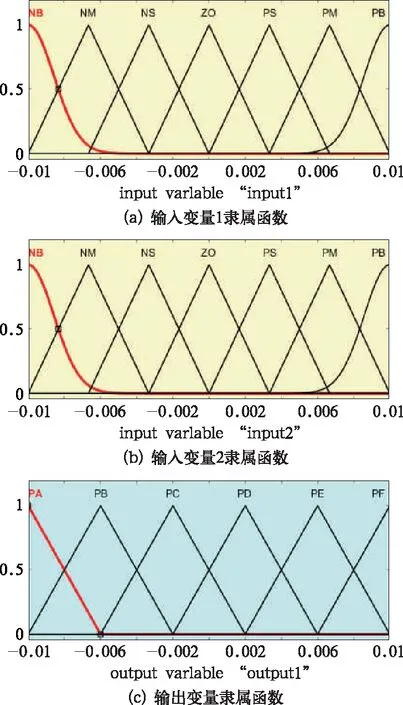
图4 输入输出变量隶属函数
2.4 模糊规则的设置
模糊规则的优劣决定模糊控制器的控制效果,通常可以根据专家经验和车辆动力学的特性制定模糊控制规则。文中制定的模糊规则主要遵循以下几点原则:车体绝对速度与车体对转向架相对速度方向相反时,减振器阻尼孔开度最大,车体绝对速度与车体对转向架相对速度方向相同时,减振器阻尼孔分级调控,制定模糊规则时采用“IF A AND B THEN C”的形式。模糊规则如表1所示,输出曲面如图5所示。

图5 模糊规则输出曲面
在模糊天棚阻尼控制器中,输入变量经过模糊处理可以得到输出变量的隶属度,然后经过解模糊处理得到精确的数字控制量。常用的解模糊方法有中位数法、加权平均值法、重心法等,文中采用重心法对输出变量的隶属度进行解模糊处理。
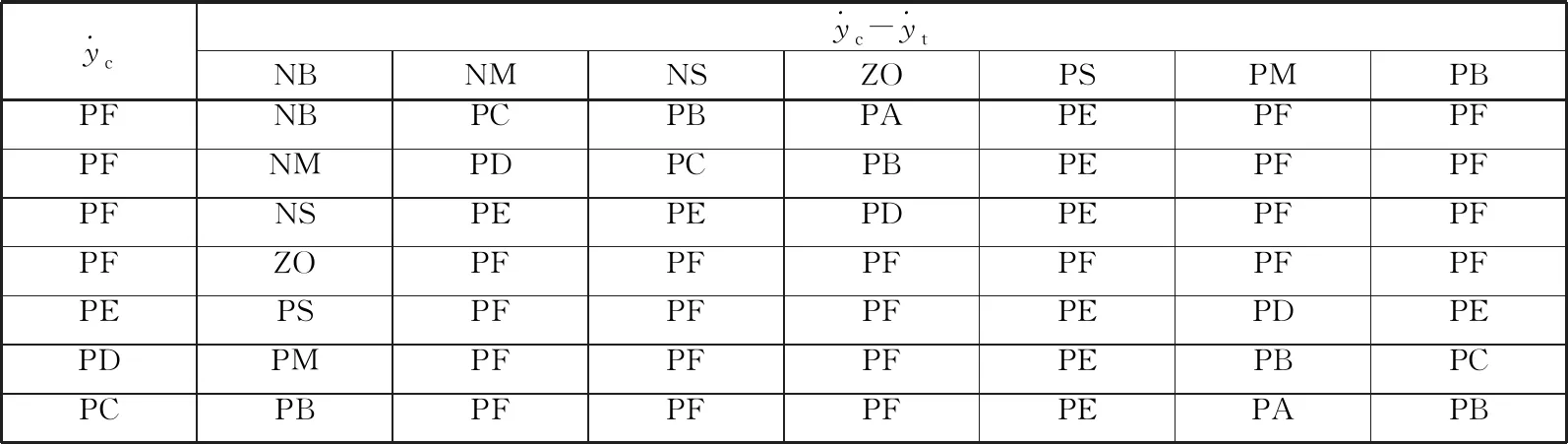
表1 天棚阻尼模糊控制规则
2.5 模糊天棚阻尼控制仿真模型
采用Matlab 的模糊控制工具箱设计模糊控制器,然后利用 Simulink的模糊控制模块搭建模糊天棚阻尼控制模型,导入所设计好的模糊化控制器,搭建出一个完整的模糊控制系统,如图7所示。
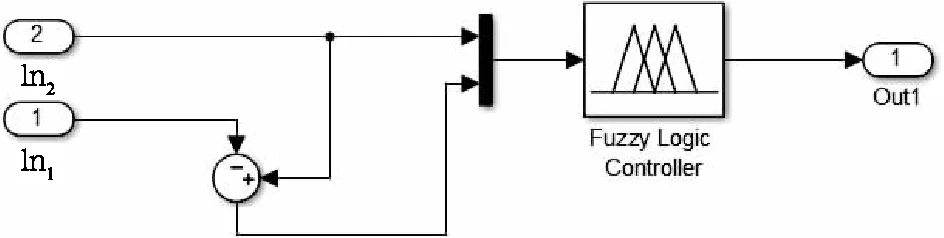
图6 模糊天棚控制模型
在模糊天棚阻尼控制系统中,用模糊控制模块对模型进行模糊控制,调节液压减振器的节流孔开度,从而实现可调阻尼的控制。
根据前面所建立的7自由度横向半车体动力学Simulink模型,以轨道不平顺信号以及车速作为输入,车体横向振动加速度为模型输出,利用模糊天棚阻尼控制系统对二系悬挂阻尼值进行实时调节,实现调节二系悬挂阻尼以减小列车横向振动。加入模糊控制的仿真模型如图7所示。
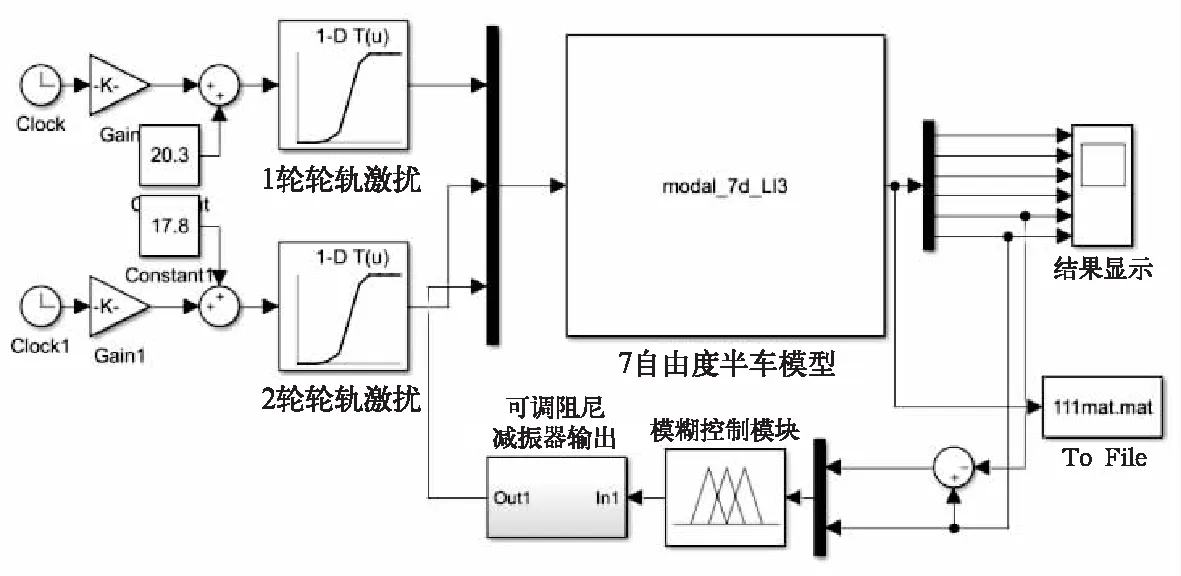
图7 模糊天棚控制模型控制结构
3 仿真验证
3.1 模糊天棚阻尼悬挂仿真分析
设置被动控制时的固定阻尼值csy=58.8 kNs/m,并与模糊天棚阻尼模型进行仿真对比,从列车横向加速度时域结果可看出:由于武广高铁线路质量优于秦沈线路,车辆通过武广高铁专线时的车辆横向振动加速度水平明显低于通过秦沈线时。在采用模糊天棚控制策略后,对于两种线路条件下车体横向加速度时域峰值均明显减小。从功率谱密度PSD图可看出,在采用模糊天棚阻尼控制后,1~15 Hz频率范围的车体横向加速度明显减小,但20~100 Hz频率范围内的车体横向加速度稍有增加,考虑到影响车辆横向平稳性权重较大的频率范围为1~15 Hz,20 Hz以上高频部分权重相对较小,因此在采用模糊天棚控制后能够有效减小敏感频率范围的车体横向振动加速度,从而提高旅客的乘坐舒适度,而且由于线路条件本身的差异,在采用模糊控制后,对秦沈客专线路条件下的车体横向振动改善效果比对武广高铁线路下的改善效果更加明显,可见模糊天棚阻尼控制是具有一定优势的,尤其是对于跨线运营车辆更具有意义。
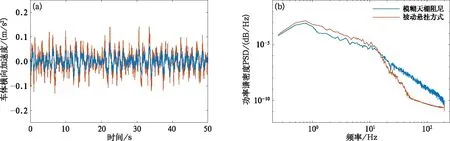
图8 武广高铁客运专线轨道不平顺下两种悬挂方式车体横向加速度对比
3.2 列车横向平稳性指标
平稳性是车辆动力学系统中评定列车振动非常重要的一个指标,它体现列车运行品质,国内外通常用加速度均方根值(RMS值)、Sperling平稳性指标等对列车平稳性进行评价。选择Sperling平稳性指标对列车的平稳性进行评价,计算方法如式(8)[6]:
参考国标GB 5599-1985《铁道车辆动力学性能评定和试验鉴定规范》,对车体振动加速度信号进行分析,以2 s 为滑动平移窗,求出车辆Sperling平稳性指标的随时间变化结果。
(8)
式中:W为平稳性指标;a为车体加速度;f为振动频率;F(f)为频率修正系数。

图9 3种悬挂方案车体平稳性指标对比
从图9可看出被动控制下的横向平稳性指标基本位于2级“良好”范围内,采用模糊天棚阻尼控制后平稳性指标明显变好,基本能够达到1级“优”范围内。
4 结 论
为了提升动车组对服役环境的适应能力、提升动车组的乘坐品质,本文提出一种结合模糊天棚阻尼控制方法,建立了高速列车横向半主动悬挂模糊天棚阻尼控制结构。该控制结构采用模糊控制策略实时调节减振器节流孔开度,达到输出最优横向阻尼值以减小车体横向振动加速度的目的。通过将该控制结构用于列车7自由度横向振动车体模型的横向减振器阻尼控制,从仿真结果可以看出采用模糊天棚阻尼能够有效衰减对横向平稳性影响较大的1~15 Hz车体横向振动加速度水平,且采用半主动控制后车辆横向平稳性指标明显变好,可见模糊天棚阻尼控制能够有效提升车辆乘坐舒适度。
