一种基于相电感的无位置传感器改进控制方法
2020-10-26王志伟杨建飞窦一平王日茗樊温新
王志伟,邱 鑫,2,杨建飞,2,窦一平,王日茗,樊温新
(1.南京师范大学 南瑞电气与自动化学院,南京 210046;2.南京智能高端装备产业研究院有限公司,南京 210042)
0 引 言
内置式永磁同步电机(以下简称IPMSM)由于具有效率高、结构简单、动态响应快等优点,在电气传动中得到广泛应用[1]。一般来说,为实现电机高性能矢量控制,精确的位置信号是必不可少的,而位置信号可由位置传感器提供。使用位置传感器会带来系统成本升高、可靠性下降等问题,因此无位置传感器控制成为近年来的热点[2]。
无位置传感器控制一般分为两种:基于反电动势的观测器法[3-4]和基于电机凸极效应的高频信号注入法[5-6]。反电动势法依靠反电动势的提取估算转子位置,该方法易于实现,通用性好,但在电机低速或零速运行时,反电动势幅值过小,难以获取,这样无法实现转子位置的检测[7]。高频注入法不需要电机的反电动势和其他参数,在低速或零速范围内能够较好地提取位置信息[8],但高频注入法需要使用以滤波器为主体的位置追踪观测器,其设计繁琐并增加了计算复杂性。
相电感同样含有转子位置信息。文献[9]使用d轴高频电压注入法获得电感比例系数,然后利用旋转高频电压注入法辨识d,q轴电感,根据辨识出的电感获取位置信息。该方法需要两次高频电压注入,稍显复杂。文献[10]通过事先测量电机的自感和互感,利用磁场相等原理得到响应矢量控制所需电感数值,并用于无位置控制。但对于位置信息的提取并没有明确说明。文献[11]提出一种基于相电感的无位置传感器控制方法。利用高频旋转电压注入法得到实时相电感,根据相电感得到转子位置信息。然而该方法使用低通滤波器提取高频电流幅值,需要补偿低通滤波器对电流幅值和相位带来的不利影响;同时,利用arctan函数计算转子位置,使得估算的转子位置不平滑并带有抖动。为了解决这些问题,本文提出一种改进方法。在文献[11]方法(下面称传统方法)的基础上,利用正弦函数特性提取高频电流幅值,使用锁相环估算位置信息。最后,通过仿真验证了无位置传感器控制方法的有效性。
1 基于相电感检测位置的基本原理
1.1 相电感随转子位置变化规律
在不影响控制性能的前提下,为简化分析,不考虑电机铁磁材料饱和现象与绕组谐波影响,假定A相绕组轴线为初始位置,则电机的自感和互感可以分别表示[11]:
(1)
(2)
式中:θ为电机转子位置电角度;Laa0为由空间基波气隙磁场引起的自感分量;La1为电枢漏磁引起的附加分量;Lg2为由转子位置改变引起的自感分量。
以A相为例,其相绕组磁链表示:
(3)
根据电感公式,A相相电感的表达式:
(4)
同理,B,C相相电感可表示:
(5)
为消除直流分量的影响,将相电感两两作差,得到相电感之差Lab,Lbc,Lca,即:
(6)
由式(6)可知,相电感中由空间基波气隙磁场引起的自感分量和电枢漏磁引起的附加分量被消除,所得相电感为三相对称的正弦波,只含有由位置改变引起的自感分量,可以用空间矢量表示[12]。利用3/2变换,将相电感之差变换至α,β坐标系中:
(7)
将Lab,Lbc,Lca和Lα,Lβ绘入图1,根据式(8)可以计算转子位置。
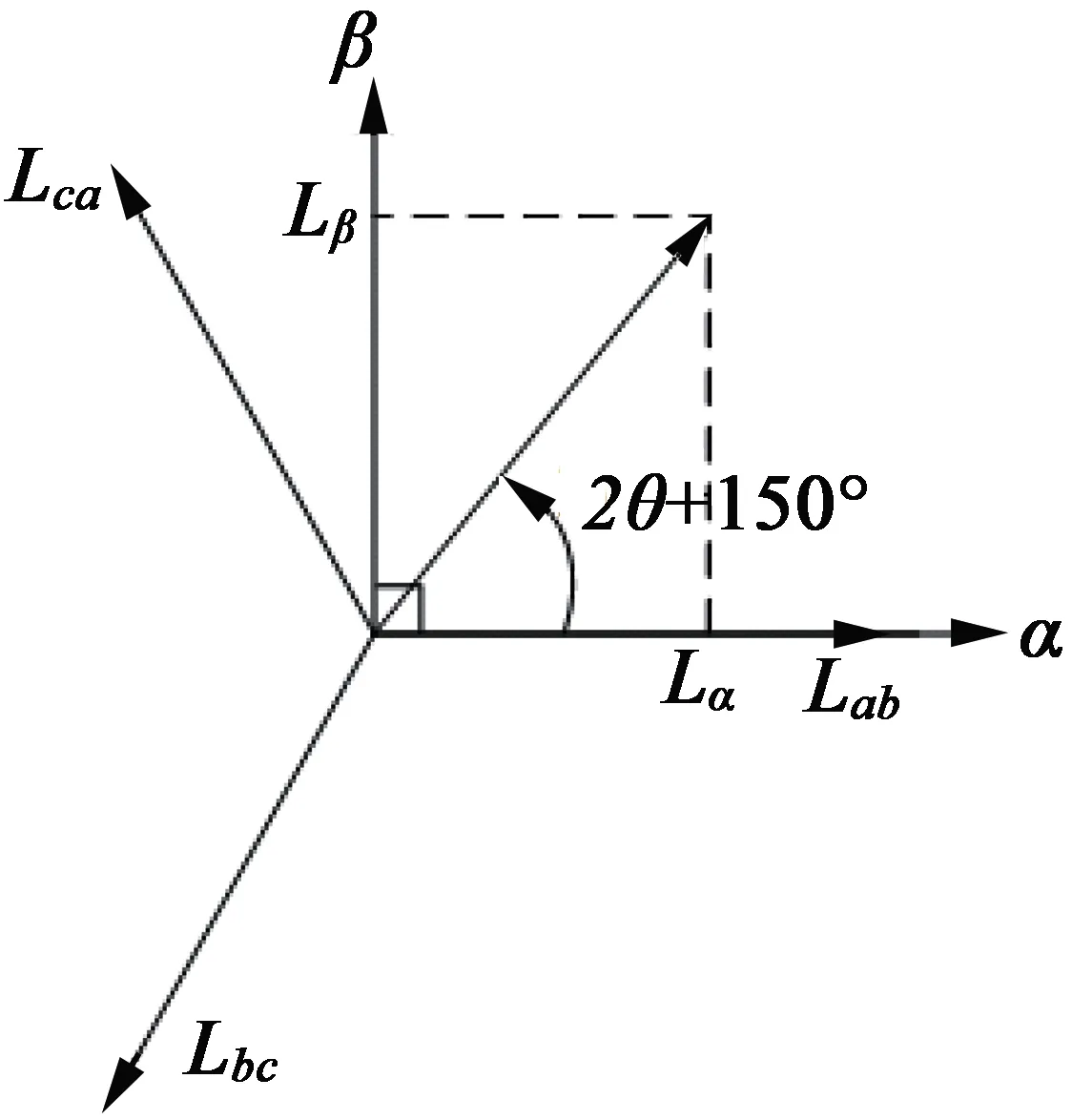
图1 静止坐标下电感与转子位置关系
(8)
1.2 正交锁相环转子位置提取
直接利用arctan函数计算转子位置容易受Lα,Lβ幅值大小影响,另外Lα,Lβ含有谐波,导致估算出来的位置角度不平滑并伴有抖动。为提高转子位置的估算精度,这里采用正交锁相环从Lα,Lβ估算转子位置信息[13-14]。Lα,Lβ归一化后的锁相环控制框图如图2所示,正交锁相环包括鉴相器(PD),环路滤波器(LF)和压控振荡器(VCO)。其基本原理为锁相环将VCO输出信号的频率及相位锁定为参考信号的频率及相位。
2) 平衡密封环有2个反向的U型金属膨胀环(弹簧),如图1所示,开口方向1个向上、1个向下,该设计能确保介质无论从阀前还是阀后进入,平衡密封环都能起到很好的密封作用。密封原理: 当高压介质进入U型环内时撑开U型环密封,确保2个U型环中有1个能起到密封作用。
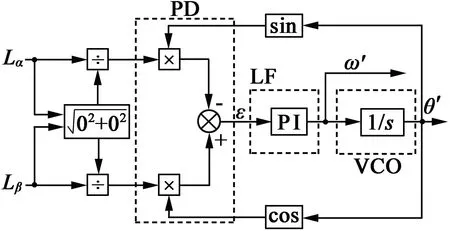
图2 锁相环控制框图
将含有谐波成分的Lα,Lβ定义:
(9)
式中:Ls为Lα,Lβ的幅值,Lαh和Lβh为谐波项。则有:

(10)
式(10)表明,PD的输出有3个分量,分别为1个包含位置信息的差频相和2个可以被LF滤除的谐波项。当估算的转子位置与输入的转子位置相近时,有如下式子:
sin(θ-θ′)≈θ-θ′
(11)
当θ-θ′时,相位被锁住,估算的位置为实际位置。
图3为结构简化的锁相环控制框图。其闭环传递函数:
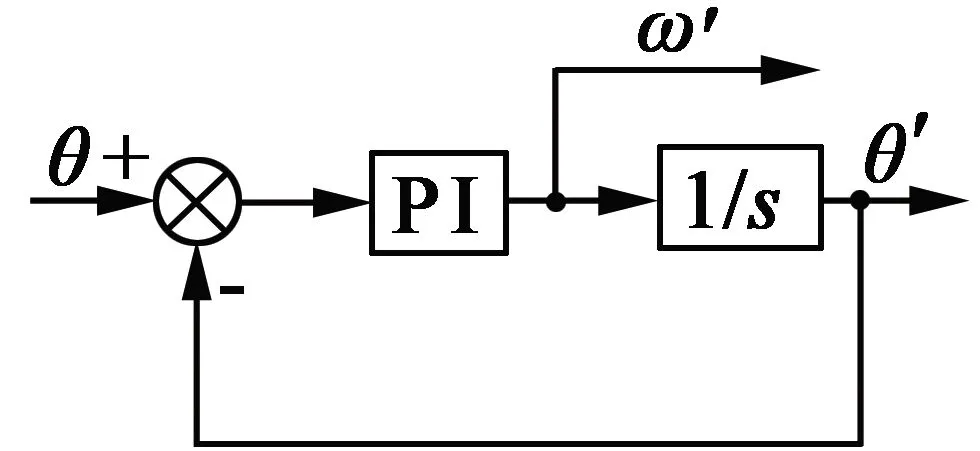
图3 结构简化的锁相环控制框图
(12)
式中:kp和ki分别为锁相环的比例和积分增益。
典型二阶系统传递函数:
(13)
式中:ωn为系统自然频率;ζ为阻尼系数。对比式(12)、式(13),可得:
(14)
通过合理选取kp和ki可以让锁相环获得理想的稳态效果和动态响应。这里锁相环系统自然频率ωn取200 rad/s,阻尼系数ζ取1,则锁相环比例增益kp=400,积分增益ki=40 000。
2 相电感提取
上述位置估计算法需要实时相电感的数值,而相电感的数值可以借助电机的高频激励数学模型得到。往IPMSM注入旋转高频电压,即向α,β坐标系注入如下高频电压信号:
(15)
式中:Vh为高频电压幅值;ωn为高频电压角速度。
由于高频电压角频率较高,感抗远大于电阻,则相电感表达式:
(16)
式中:Zah,Zbh和Zch为三相绕组高频阻抗;Iah,Ibh和Ich为三相高频电流幅值。
一般来说,利用带通滤波器将高频响应电流和基频电流分离出来,而高频响应电流幅值由低通滤波器提取。这会对电流幅值和相位产生不利影响,需要在之后的环节对这两个问题进行补偿。为有效提取高频电流幅值,这里利用正弦函数特性来提取幅值。
正弦函数具有如下的特性:
(17)
iah=Iahsin(ωht+φ)
(18)
式中:Iah为高频电流幅值;φ为相位。则a相高频电流的幅值:
(19)
整个系统控制框图如图4所示。
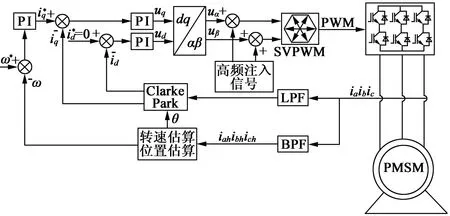
图4 基于相电感的位置估算系统控制框图
3 仿真验证
利用MATLAB/Simulink建立基于相电感的IPMSM位置估算仿真模型。仿真采用常规Id=0矢量控制,控制周期为100 μs。部分参数如表1所示。
表1 仿真用参数
图5为a相电流及其高频分量与幅值波形。可以看出,利用低通滤波器提取高频电流幅值不仅幅值有衰减,而且相位落后一定角度。利用正弦函数特性提取高频电流则没有上述问题。
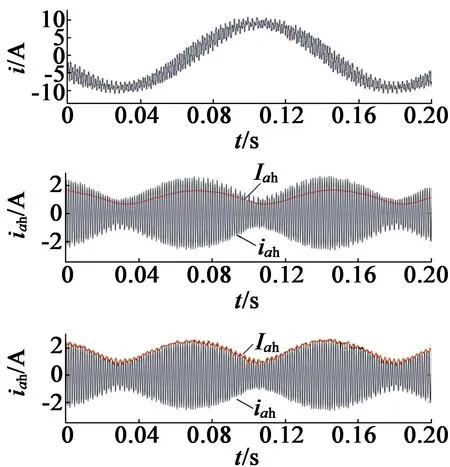
图5 a相电流及其高频分量与幅值
图6(a)、图6(b)分别为利用低通滤波器和正弦函数特性提取高频电流幅值计算出来的相电感和相电感之差波形。图6(b)中的相电感和相电感之差波形虽然有高次谐波,但相比图6(a)正弦度更高。
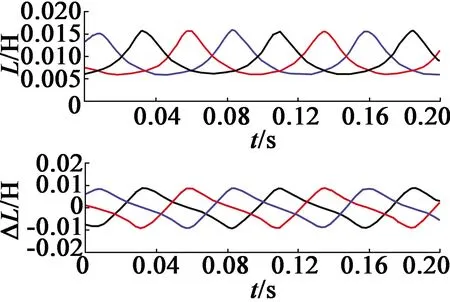
(a)传统方法
图7(a)、图7(b)分别为传统方法和改进方法在稳态运行时的波形。相比传统方法,改进方法的转子位置更加平滑且抖动较小,转子位置误差也较小为±5°,转速波动也较小,转速误差为±3 r/min。可以看出,改进方法具有更好的稳态性能。
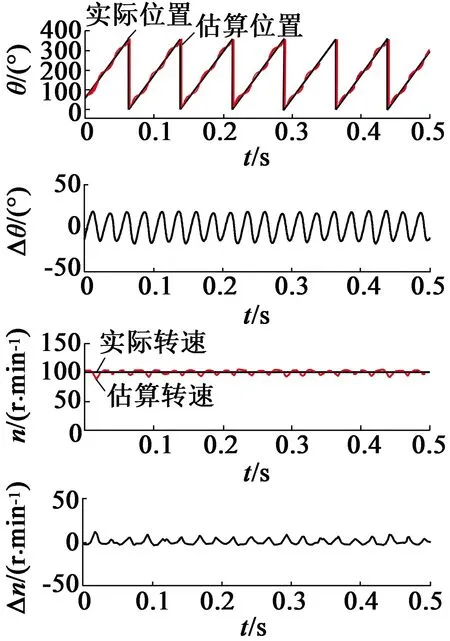
(a)传统方法
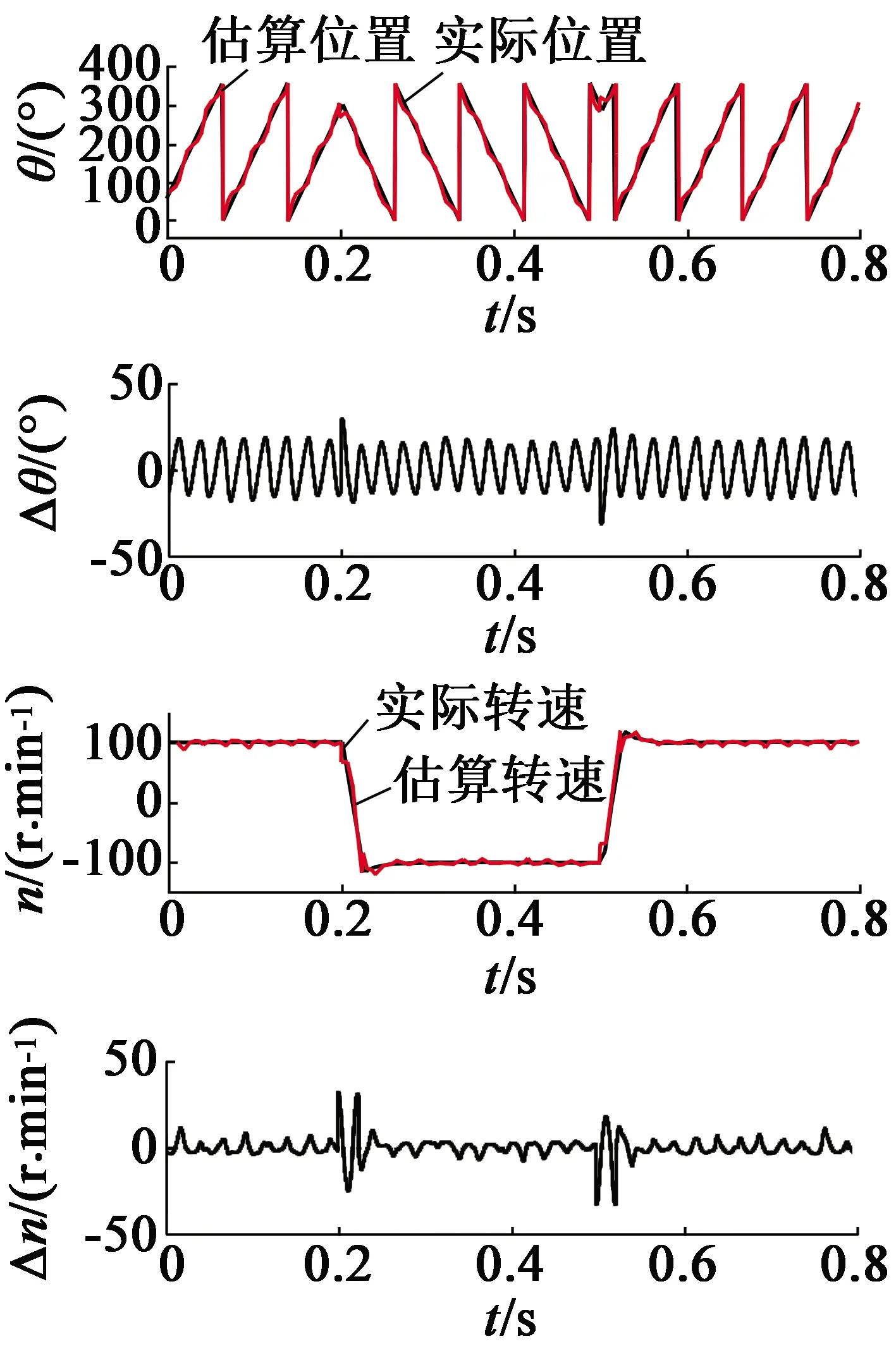
为测试动态性能,图8、图9分别为速度突变和负载突变的波形。从图8可以看出,在转速突变时,改进方法的位置稍稍有些延迟,位置误差变大,转速误差也相比稳态有些提高;待转速稳定时,估算位置和估算转速又能较好地跟随实际位置和实际转速。在整个运行区间,改进方法的位置误差和转速误差都小于传统方法。
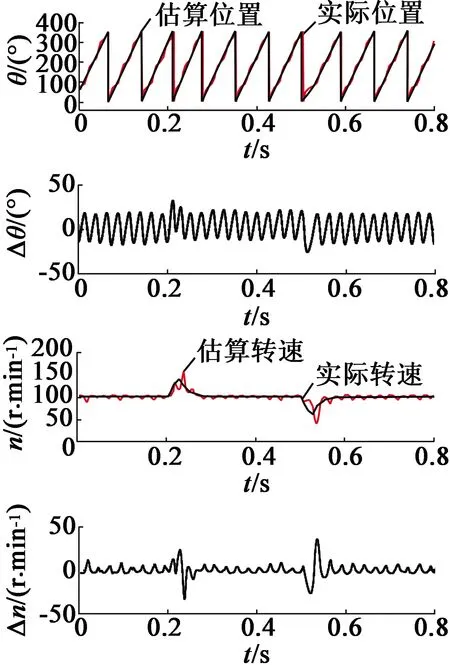
从图9可以看出,传统方法和改进方法的位置估算对于负载变动都不敏感,但传统方法的位置误差和转速波动稍稍偏大。另外,在突增或突卸负载时,传统方法的转速误差会变大,达到30 r/min。而改进方法在整个电机运行期间转子位置误差和转速误差都较小,在突增或突卸负载时,转速误差也只是增加到10 r/min。图8、图9说明改进方法具有更好的动态性能。
(a)传统方法
(a)传统方法
4 结 语
本文研究了一种基于相电感的无位置传感器改进控制方法。与传统方法相比,本文利用正弦函数特性提取高频电流幅值,避免了使用低通滤波器带来的幅值衰减和相位滞后问题;加入锁相环提高了转子位置和转速的观测精度。仿真结果表明,改进的无位置传感器控制方法具有良好的稳态和动态性能。
