基于增量式码盘舵片姿态的识别系统设计
2020-10-24刘凤丽李荣辉张嘉易郝永平
刘凤丽 李荣辉 张嘉易 郝永平
(沈阳理工大学机械工程学院 辽宁 沈阳 110159)
一、引言
随着科学技术的不断发展,信息化、智能化在现代战争中将发挥着越来越重要的作用。火炮作为传统的武器,在现代战争中仍被广泛应用,但是由于炮弹在发射后受到温度、湿度、地理环境等因素的影响不能对目标实施精确打击,为了增加火炮的精确打击能力,提出了弹道修正技术的理念。弹道修正技术就是在炮弹的飞行过程中通过弹载计算机实时解算出弹体的角度、位置,计算出实际弹道。通过与理论弹道数据进行对比分析,及时调整舵机的姿态,来进行对炮弹的修正,从而减小偏差,提高精确打击能力[1]。
在调整舵机姿态时,需要计算出舵片的实时角度、转速以及停止角。所以为了得到舵片的姿态信息,我们利用编码器来测量。由于光电式编码器具有能够准确测量角位移,高精度以及较高分辨率,因此大多数采用光电式编码器。在刻孔方式上又分为绝对式和增量式,绝对式编码器在每个位置都有其唯一的对应角度,无需找参考不会受到断电影响,抗干扰能力强,其精度与条纹码的精度有关,结构复杂。增量式码盘的位置却是相对的,所以需要增加一个零点位置识别,以此来标定初始位置以及记录圈数,增量式编码器具有结构简单和便于实现等优点,在位置识别中具有广泛应用。由于二维修正弹舵片内部的空间有限,故本次设计采用的是增量式编码器。
二、光电增量式码盘原理
增量式编码器的单位角度与脉冲信号是一一对应的,每个脉冲信号对应一个单位角度。由于没有参考点,所以无法判断舵片当前的绝对位置。因此需要建立一个零点标志位,通过参考零点解算舵片当前真实角度。
增量式编码器是直接利用光电转换原理输出三组方波脉冲,由三个通道A、B、Z组成。其中把Z相作为零点标志位,舵片每旋转一周,Z相只产生一个脉冲信号,利用光电传感器识别舵片内部的莫列波纹,当Z相传感器旋转通过莫列波纹时,便将当前位置设定为初始角度0°。A、B相进行舵片角度的解算,在A、B相中两个光电传感器需要平行放置,且他们之间的相位差为90°[2]。两光电传感器相邻间隔为N+1/2个信号格[3]。如图1,为传感器位置图。
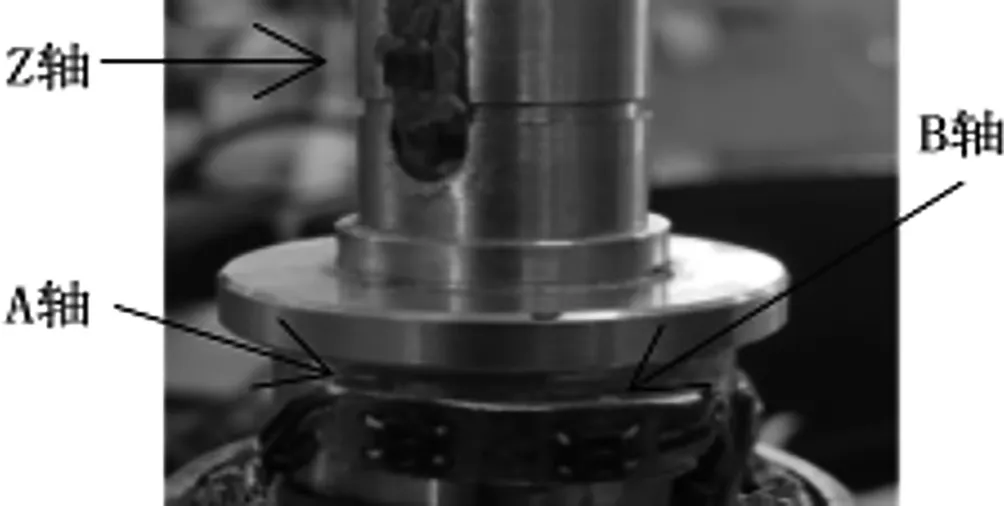
图1 传感器位置图
两光电传感器A、B放置于舵机定子上莫列波纹放置于舵片内部,当舵片相对于定子转动时,由于A、B相之间的相位差,会读取到01、11、10、00四种不同编码组合信息,由于编码的顺序是固定的,所以可以根据编码的顺序判断出舵片旋转方向。如表1为舵片正反转识别。

表1 正反转编码图
舵片角度的识别精度与光电增量式码盘的分辨率有关,分辨率由光电传感器识别能力决定,即舵片旋转一周发出的脉冲数,单位为PPR(脉冲/秒)。本次设计中,舵片内部的莫列波纹数为120,光电编码器的分辨率为120PPR,因为有A、B两个相,所以共有240个逻辑组合,假设编码器的分辨率为T,采样数为N,舵片的角度A计算公式为:
A=N*360/2T
三、硬件设计
由于弹体内部空间有限且需要较高精度的传感器,经过综合信息比对,最后选用的传感器为反射式光电传感器,型号为ITR8307。该种型号传感器具有体积小,质量轻,结构紧凑,响应时间快速,灵敏度高,便于安装,受环境干扰小等特点。如图2所示,为ITR8307型传感器的感应特性曲线。从图中可以看出,当莫列波纹与光电传感器间距为0.6~0.7mm时,感光特性最好,电流百分比达到最大,经过实际测试证明,当传感器与莫列波纹间距为0.7mm时,电压幅值达到最大,具有最好的测试效果。

图2 传感器特性曲线图
选用LM339(四路差动比较器)组成逻辑门电路。LM339具有电压失调小,共模范围大,对比较信号源的内阻限制很宽,电压范围宽,输出端电位可灵活方便地选用,差动输入电压范围很大等特点。由于本次设计只用3路逻辑电路,为了不产生信号干扰,将第4路中的管脚与GND直接相连。
如图3是码盘电路原理图,由于传感器接收与发射端都需与DSP中I/O口相连接,为了保护I/O口,传感器两端电压为3.3V。在传感器的发射端需要串联个100Ω的电阻,以免电流过大,损坏器件。在传感器的接收端需要串联一个电阻,起到分压的效果,可以调节接收端电压的大小。经过反复试验,电阻的阻值为15KΩ时,效果最好。将传感器接收端与LM339的中任意一路的同相输入端相(+)连接,与其对应的反向输入端(-)电压进行比较,当“+”端电压高于“-”端电压时,输出高电平。当“-”端电压高于“+”端电压时,输出低电平。方向输入端即为比较电压,为了可以方便调节比较电压值得大小,将其串联一个滑动变阻器,其电阻值为0-5KΩ。在输出端与正电源之间需要接一只电阻,选用不同阻值的上拉电阻会影响输出端电位的值。经过试验,上拉电阻值为1KΩ时,输出端电位值为3.3V,效果最好。

图3 码盘电路原理图
四、实验测试及结果
在码盘测速中,一般分为三种方法:“M”法、“T”法、“M/T”法[4]。在低转速情况下“T”法测速精度比“M”法测速精度高,高转速下“M”法测速精度更高。在二维修正中,由于舵片的转速是不确定的,所以前两种方法都有一定的局限性,因此我们采用“M/T”法测速。设两光电传感器识别脉冲数N1和时钟脉冲数N2,则舵片转数公式为:
n=60 N1f/4MN2=15 N1f/MN2
如图4所示,为“M/T”法测速原理图,需要在DSP中多加一个定时器,在定时器时间间隔内,光电传感器的脉冲数为N1、时钟的脉冲数N2,将N1和N2代入舵片转速公式中进行运算。“M/T”法消除了计数器溢出等问题,兼备“M”法和“T”法在不同转速下的优点,解算精度较高。

图4 “M/T”法测速原理图
如图5所示,是舵片以一转每秒的转速下匀速转动的角度曲线图。从图中可以看出,在舵片旋转的第一周内会出现乱码的情况,此时为第一次寻找零点的时候,所以会出现角度没有到360°时就进行清零。由于炮弹飞行前段并未进行修控,所以不会对修正效果产生影响,并不会影响角度识别。从图中的角度变化曲线可以看出,角度在0-360-0之间均匀变化,舵片在平稳匀速转动。

图5 匀速转动的角度曲线图
如图6所示,这是舵片在加速过程中绘制的数据曲线,从图中可以看出舵片旋转速度是由慢到快的。角度的变化频率也是越来越快,图中的曲逐渐密集,说明舵片处于加速过程中。
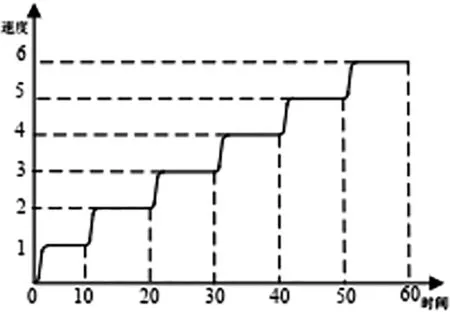
图6 匀加速曲线图
通过两相邻角度之间的角度差与其对应的时间就可以解算出当前舵片的转速,通过多次测量,解算出的舵片转速与实际转速相一致的,该码盘满足本次实验要求。
五、结束语
本文设计了基于增量式码盘舵片姿态的识别系统,搭建了码盘基础电路,并进行了测试实验,实验结果表明,本次设计结构简单,实用性强,并且可以有效测出舵片的角度及其转速,具有一定的实用价值。
