基于RSSR转向控制的变距行走无碳小车优化设计
2020-10-18焦仁强阮文廉
龚 灿,焦仁强,b*,阮文廉,b
(湖北理工学院 a.机电工程学院,b.智能输送技术与装备湖北省重点实验室(筹), 湖北 黄石 435003)
0 引言
无碳小车设计是我国大学生工程训练综合能力竞赛项目,是人们利用科学技术倡导无碳生活的缩影。第六届全国大学生工程训练综合能力竞赛S组项目在往年的基础上提出了隔桩变距的要求。赛道按平均间距1 m摆放障碍桩,其中奇数桩位置不变,偶数桩根据现场抽签结果在原桩位置±(200~300)mm内做调整(相对于出发线,正值远离,负值移近)。
无碳小车设计形式多样,主要区别在于小车的转向控制设计及小车各机构的参数调节。传统的设计多采用曲柄滑块机构进行转向控制[1]。该机构连接处多为滑动摩擦,摩擦系数较大,有一定冲击,机械效率较低。新型的空间四连杆(RSSR)机构的结构简单,一体化程度较高,降低了装配误差,同时机构各处多采用球副连接,运动副单位面积内所受压力小,接触面便于润滑,故摩擦系数小,能耗低,能够获得较高的传动精度[2-4]。采用空间四连杆机构可以实现小车的左右转向控制,并可以通过改变连杆和摇杆的长度微调小车轨迹,但在微调过程中若仅只改变某一机构的尺寸,而不对其他机构位置做相应调整,则会导致小车每次的发车姿态不同[5]。
本文在已有研究成果的基础上,对空间四连杆机构控制转向无碳小车进行优化设计,并针对因机构微调带来的发车姿态变化问题,采用一种能定位小车发车角度的设计方法,自行设计开发一款基于空间四连杆(RSSR)机构控制转向的变距行走无碳小车,为无碳小车的改进提供参考。
1 无碳小车关键机构设计
无碳小车整车主要分为车架、原动机构、传动机构、转向机构、驱动机构和微调机构6个模块。无碳小车结构示意图如图1所示。
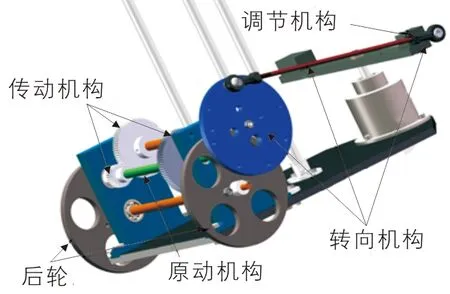
图1 无碳小车结构示意图
1.1 传动机构设计
传动机构的主要作用是将重物下落过程中产生的重力势能传递给后轮部分。为提高传输效率,优先选用结构简单、传递稳定性和精度均较高的齿轮传动机构。为避免运动过程中小车后轮打滑,采用单轮驱动和一级齿轮传动,并选用易于加工的渐开线标准直齿圆柱齿轮。小车传动机构简图如图2所示。其中Z1为后轮轴齿数;Z2和Z'2为绕线轴齿数;Z3为曲柄轴齿数,齿轮模数m取0.5;a1和a2为后轮到前轮的距离;b为后轴到前轴的距离;d为曲柄轴到前轮的距离。
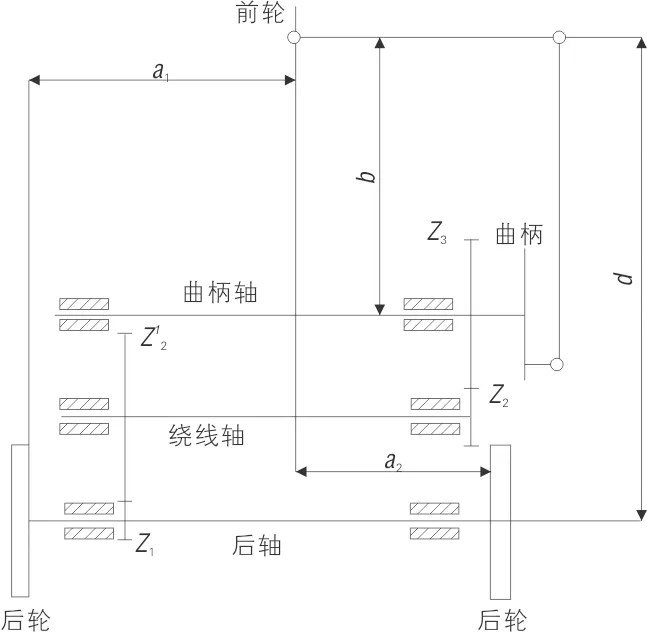
图 2 小车传动机构简图
1.1.1确定后轮直径
原动机构与后轮的传动比会直接影响小车的行走距离,传动比越大,小车行走距离就越远。但随着传动比增大,小车运动速度越高,越容易发生侧翻。另一方面,后轮尺寸也会影响小车的运动轨迹,后轮直径越大,小车的行程就越长。但随着后轮直径增大,小车的转弯性能和绕桩通过性能会降低。
小车的运动轨迹可近似为余弦函数,根据竞赛规则,未变距前两桩间距为1 000 mm,因此取余弦函数周期为2 000 mm,为使小车在改变桩距情况下仍能实现无障碍绕桩,结合余弦函数的图像分析,取振幅为400 mm。小车行走轨迹如图3所示。

图3 小车行走轨迹
小车后轮运动轨迹可拟合为:
(1)
则小车行驶距离为:
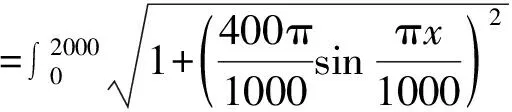
(2)
由MATLAB求解得S=2641.27 mm,此时后轮正好转过n圈(n取整数)。
为保证小车运动的平稳性,其行走速度应尽量放慢。小车运动速度计算公式为:
(3)
式(3)中,ω为小车后轴的转速;ω'为绕线轴转速,并且ω'与绕线轴半径r'成正比;i12为后轮与绕线轴的传动比;r为后轮半径。
由公式(3)可知,n的取值应尽量大。故假设小车按上述轨迹行走1个周期余弦函数曲线时后轮刚好转过10圈,则后轮半径r为:
(4)
1.1.2确定齿轮参数
绕线轴与后轮的传动比以及绕线轴半径的大小决定了小车运动的快慢。根据经验分析可知,后轮与绕线轴的传动比i12一般取4~6较为合适。通过制作简易的实物模型观察分析发现,当传动比i12=4.4,绕线轴半径r'=3 mm时,小车行走速度较为理想。
根据小车运动具有周期性的特点,当后轮的曲柄转动1周时小车刚好走完1个周期的余弦函数曲线,此时后轮转过10圈,可得绕线轴与曲柄的传动比i23为:
(5)
结合小车后轮半径和偶数桩的变距要求(±(200~300)mm)以及各齿轮间的传动比, 并根据机械设计相关知识查表[2],最后确定各齿轮参数见表1。

表1 各齿轮参数
1.2 转向机构设计
1.2.1转向机构模型
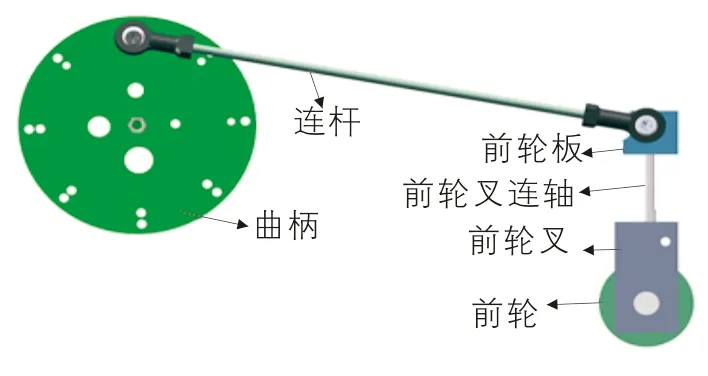
转向机构是实现小车变距绕桩的重要机构,决定小车的运动性能。因此转向机构不仅要满足转弯避障功能,还要力求做到摩擦损耗小、结构简单、易于实现等。基于此,小车转向机构选用结构简单、一体化程度较高的空间四连杆(RSSR)机构。小车运动过程中,主动件曲柄做圆周运动,通过连杆的传递带动摇杆前后摆动,使前轮产生周期性左右摆动,进而实现对小车的转向控制。空间四连杆机构示意图如图4所示。
(a) 正视图

(b) 俯视图
为保证小车运行平稳,转向机构不能具有急回特性。根据机械原理的相关知识可知:当机构曲柄中心轴线与摇杆轴线始终处于同一水平面时,可以消除该机构的急回特性[3]。因此,为满足上述几何关系,曲柄中心和摇杆轴线到小车底板的距离应始终保持相等,摇杆与前轮板通过螺纹连接固定在一起。前轮板重心与前轮叉连轴的轴线设计在同一垂直线上,从而使前轮板和摇杆轴线在运动过程中始终与底板保持平行,进而避免了前轮板因偏心而产生倾斜。
1.2.2杆长参数确定及仿真优化
小车转向机构运动简图[6]如图5所示。其中,L1为曲柄,长度为l1;L2为连杆,长度为l2;L3为摇杆,长度为l3;θ为曲柄转角;δ为前轮转角。

图5 小车转向机构运动简图
为方便小车各机构之间的定位,设前轮转角δ等于摇杆L3与y轴的夹角,即前轮的轴线与摇杆轴线的夹角为0°。
根据向量运算法有:

(6)
将各向量按基向量分解:

(7)
为方便计算令a=l3,则有:
(8)
公式(8)两边取模:
(9)
假设前轮与2个后轮在水平方向上等距,即a1=a2(如图3所示),则前轮轨迹曲率半径为:
(10)
分析可知,前轮最大摆角出现在后轮轨迹曲率半径最小处,即小车后轮运行轨迹拐点处,由公式(1)可得小车后轮轨迹曲率半径为:
(11)
初定d=180 mm,由式(11)得小车后轮轨迹最小曲率半径ρ'min=253.33 mm,对应的摇杆最大理论偏角为δmax=35.39°
为确保行驶路线不发生偏移,小车前轮左右摆角要具有良好的对称性,故连杆机构在特殊位置时需要满足以下关系:
(12)
将公式(12)代入公式(9)得:
(13)
又根据小车结构要求需满足:
(14)
联立式(13)和(14)可得:
(15)
综合以上理论分析,通过MATLAB编程仿真并进行参数微调,最终确定各构件的最优参数。空间四连杆机构尺寸参数见表2。

表2 空间四连杆机构尺寸参数 mm
2 关键部件定位设计
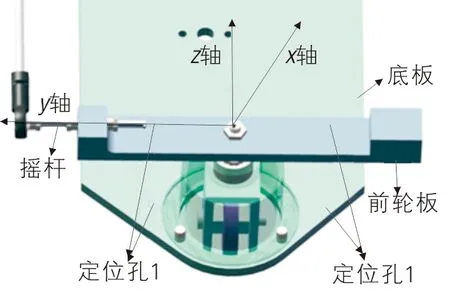
由于在比赛过程中设置了小车拆装的环节,小车零件的定位、安装及关键尺寸,对小车性能的影响至关重要[7]。因此,为了提高装配精度,节省调试时间,对小车前轮、摇杆及曲柄专门进行定位设计。小车定位设计如图6所示。
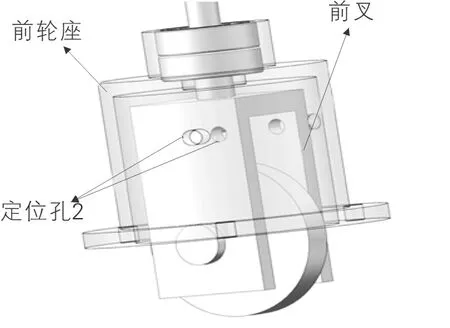
装配时使用定位销对小车进行定位。定位孔1可确保前轮板端面与y轴平行,即摇杆轴线与y轴初始夹角δ=0°,另一方面,通过定位孔1将前轮板与摇杆固接在一起,保证摇杆的几何尺寸;前轮座与前叉之间的定位孔2可保证前轮轴线与y轴的初始夹角为零,即δ=0°。定位孔1和2可实现前轮转角δ和摇杆L3与y轴夹角始终相等。
曲柄可通过其表面不同位置的孔位与鱼眼轴承的配合实现长度调节,每个孔位都由定位孔3与其相对应。定位孔3可保证与鱼眼轴承相配合的曲柄表面孔位n和曲柄圆心m的连线mn与z轴重合,即θ=π/2。定位孔3与定位孔1和2共同作用,可满足公式(12)成立的条件。
(a) 摇杆定位设计
(b) 前轮定位设计

(c) 曲柄定位设计
3 小车试制与实验
按照上述设计思路和设计要点,试制小车实物模型。小车实物模型如图7所示。
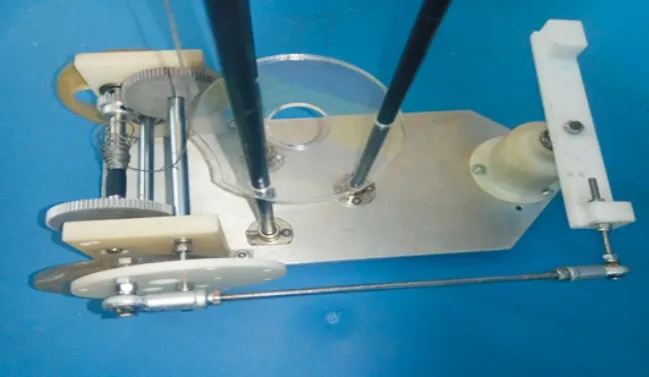
图7 小车实物模型
实验验证结果表明,对发车位置和小车机构定位进行优化之后,小车实际的行驶轨迹与仿真轨迹基本达到一致,并且当小车各机构经过微调后,小车的发车姿态,即各机构之间的几何关系仍保持一致,降低了人为因素对发车姿态的影响,减小了人为因素造成的误差。实验结果表明,优化后的无碳小车在重物的驱动下能够无障碍绕桩16个。
4 结论
1)基于RSSR转向机构控制的变距行走无碳小车,传动机构简单、效率高、运行平稳。空间四连杆机构之间具有可以演化的特点,结合控制技术可以设计出动态机构,能够满足多变的运动需求,并且可以从一定程度上简化机构形式,提高经济效益。
2)在控制成本的前提下,小车的整体设计要考虑各机构的综合影响因素,通过微调机构调整获得更好的运行性能。借助软件的仿真结果能直观体现出轨迹的变化,可准确调整参数获得最佳运动轨迹。
3)定位设计对小车各构件之间的几何关系进行了约束,减少了小车运动和调试过程中的不稳定因素。通过对小车机构进行定位设计,改善了小车的行驶性能。
