动态指向式旋转导向钻井工具面角的动态测量
2020-10-17耿艳峰宋志勇王伟亮杨毅森
耿艳峰,宋志勇,王伟亮,杨毅森
(中国石油大学(华东)控制科学与工程学院,青岛 266580)
动态指向式旋转导向钻井工具有位移延伸能力强、井眼轨迹平滑易调控、井眼净化效果好等优点[1],其优势在于它的闭环控制功能,而其工具面角的动态精确测量是准确控制的基础。
常用的工具面角测量传感器有:加速度计、磁通门、陀螺仪。其中,使用加速度计测量值可以直接解算得到工具面角[2],但钻井过程中加速度计测量值中不仅包含重力分量,还含有运动加速度和钻具振动产生的振动加速度,导致工具面角测量不准确甚至无法测量。对于运动加速度噪声,实践中通常采用测量转速的方式对其进行补偿。文献[3]采用陀螺仪测量转速,但陀螺仪长期工作时漂移较大,该方法并不能完全消除运动加速度噪声。针对陀螺仪漂移较大的缺点,文献[4]提出采用多加速度计配置来测量转动角速度和角加速度,但是该方法在井下强振动的环境下难以工作。文献[5]提出采用磁通门信号作为参考信号,采用相关检测算法来提取重力加速度分量,但动态指向式旋转导向钻井工具近钻头处磁通门输出信号受稳定平台电机磁场的影响,磁通门输出信号中噪声很大而无法直接使用。陀螺仪测量角速率积分也可以得到工具面角[6],但陀螺仪长期工作时存在漂移,对其角速率积分将会对该误差累积,长时间测量时测量误差会很大[7]。单独使用加速度计和单独使用陀螺仪都无法实现工具面角的动态测量。
大量研究表明通过融合不同传感器数据可以显著提高测量精度,互补滤波和卡尔曼滤波是两种常用的数据融合方法。互补滤波原理简单、设计方便,在陀螺仪和加速度计数据融合中应用广泛[8]。文献[9]使用互补滤波器融合陀螺仪和加速度计的测量数据取得了良好效果,但是在陀螺仪漂移很大时工具面角的测量精度会降低。卡尔曼滤波方法可以根据系统的特点进行针对性设计,在井斜角和钻井工具姿态角的测量中已有成功应用[10]。
本文使用两个三轴加速度计对置来消除运动加速度的影响,并提出一种融合加速度计和陀螺仪测量数据的组合滤波方案,该方案采用扩展卡尔曼滤波算法,能够充分利用加速度计长期测量时漂移较小的优点和陀螺仪测量工具面角短时精度高的优点。仿真和实测结果表明,该方法能够在井下振动环境下完成工具面角的动态精确测量,且不受陀螺仪漂移的影响。
1 工具面角测量方法
1.1 加速度计测量工具面角方法
动态指向式旋转导向钻井工具的测控系统安装在钻铤内部的稳定平台上,工作时外部钻铤旋转,而稳定平台可以保持对地静止或缓慢转动,通过控制稳定平台的位置可以改变钻具的工具面角,从而控制钻进方向[11]。当前系统主加速度计和辅助加速度计的安装方式如图1所示,图中φ为工具面角,α为井斜角。
当两个加速度计之间夹角为180 °时,两加速度计测量值相减便可以消除稳定平台转动引起的运动加速度[9],此时加速度计各轴测量值用ax、ay和az表示。工具面角的计算公式为:

1.2 陀螺仪测量工具面角方法
陀螺仪敏感轴与稳定平台轴向平行,用来测量稳定平台对地转速,陀螺仪测量转速模型为[12]:

式中,ω是陀螺仪输出转速值,ω0是稳定平台转速真实值,b是陀螺仪漂移,rg是陀螺仪测量噪声。对稳定平台转速积分可得到工具面角,陀螺仪测量工具面角的公式为:

式中,φgk表示k时刻工具面角,ωk为k时刻陀螺仪输出转速,Ts为采样周期。
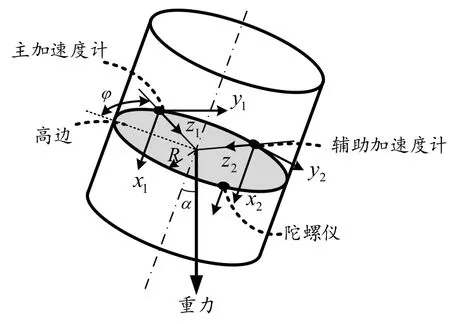
图1 双加速度计示意图Fig.1 The dual-accelerometer placement
1.3 组合滤波测量工具面角方法
1.3.1 状态方程
考虑陀螺仪测量工具面角短时间的精度高,故使用陀螺仪测量值对工具面角进行一步预测,式(2)带入式(3)得:

陀螺仪漂移bk为随机游走过程,表达式为:

式中,rb是影响陀螺仪漂移的噪声。
陀螺仪转速ω的积分对k时刻的工具面角φk进行预测,同时将陀螺仪漂移bk作为状态变量,建立的组合滤波模型的状态方程为:

1.3.2 观测方程
工具面角的取值范围为0 ≤φ<360°,若直接将加速度计测量到的工具面角作为观测值,则由于工具面角在360 °时陀螺仪的预测值和加速度计的测量值存在差别,两者跳变不同步将导致计算出很大的测量新息,严重影响滤波器性能。故此处将连续变化的加速度计y轴和z轴测量值作为组合滤波方案模型的观测变量,观测方程为:

式中,Zk表示观测量;ayk,azk分别表示k时刻三轴加速度计y轴和z轴的测量值;Vk为测量噪声;gyzk表示k时刻重力加速度在yz平面的分量,当井斜角为α时有:

结合井下噪声特性[3],将组合滤波模型中的系统噪声Wk和测量噪声Vk假设如下:

其中:

此处:
q1:影响工具面角φ的过程噪声协方差;
q2:影响陀螺仪漂移b的过程噪声协方差;
r1:加速度计y轴测量噪声协方差;
r2:加速度计z轴测量噪声协方差。
组合滤波模型的观测方程为非线性方程,因此选择扩展卡尔曼滤波算法(Extended Kalman Filter,EKF)进行解算。
2 组合滤波方法与仿真
2.1 自适应扩展卡尔曼滤波器设计
旋转导向钻井工具工作时,不同地质条件下稳定平台的运动状态和受振动强度与形式差别很大,导致加速度计测量噪声变化很大,而陀螺仪受振动影响较小,因此陀螺仪测量方程(状态方程)中过程噪声变化较小,故采用测量噪声自适应的扩展卡尔曼滤波器。
Sage-Husa 自适应方法原理简单,实时性好,可以实时估计出测量噪声方差Rk。但Sage-Husa 算法在估计Rk时采用了减法运算,这可能会导致Rk失去正定性而引起卡尔曼滤波发散,此处使用Sage-Husa 算法的改进。Rk的极大后验估计器为:

用代替则:

则,式(11)可得:

Rk的均值为:

利用指数加权法,可得Rk的次优估计为:

其中,Hk为k时刻系统观测矩阵;Zk为k时刻测量值;ek为k时刻测量新息;Kk为k时刻卡尔曼滤波增益矩阵;dk=(1 -b)/(1 -bk),b为遗忘因子,一般取0.9 <b< 0.999。遗忘因子b越小对最新测量数据的使用程度就越大,尝试不同b值后,此处选择b=0.97。
状态方程为线性方程,观测方程为非线性方程的自适应扩展卡尔曼滤波步骤为:
Step1:状态一步预测。根据k-1 时刻陀螺仪测量转速及k-1 时刻陀螺仪漂移计算k时刻工具面角:

Step2:测量新息计算。

Step3:状态更新。根据卡尔曼滤波增益和测量新息计算滤波结果:

Step4:求观测矩阵。

Step5:滤波增益矩阵计算。

Step6:一步预测协方差阵计算。

Step7:协方差阵更新。

2.2 井斜角对滤波效果的影响
组合滤波方案中,系统观测方程用到了井斜角,即式(8)中井斜角α必须已知。井斜角常由随钻测量(Measurement While Drilling,MWD)系统静态测量,且MWD 系统安装位置距钻头较远,故MWD 系统并不能实时准确获得钻头处井斜角。井斜角也可由安装在稳定平台上加速度计动态测量,但是加速度计受振动影响大,测量存在较大误差,下面对井斜角α对滤波效果的影响进行仿真。
2.2.1 井斜角不变仿真
令井斜角恒为45 °,并在加速度计上加上均值为0、方差为 0.5g2的测量噪声,此时加速度计的测量值为:

在滤波计算时分别令式(17)和式(19)中gyz=gsinαn,(n=11,12,13),比较n取不同值时滤波效果。其中:
α11=45°:表示滤波过程中井斜角准确已知;
α12=90°:表示滤波过程中井斜角无法测量,设置井斜角固定为90 °;
α13=45°+ω13:表示滤波过程中井斜角可测量,但存在测量误差,ω13表示测量噪声。
表1是α取不同值时滤波结果的仿真对比,数据为10 次仿真的平均值。

表1 井斜角不变时不同α值组合滤波均方根误差(RMSE)Tab.1 Combined filtering RMSE with different α values when deviation angle is a constant
2.2.2 井斜角连续变化
表2是粘滑工况下井斜角从90 °连续变化到5 °时α不同取值时滤波结果的仿真对比,数据为10 次仿真的平均值。其中:
α21=αtrue:表示滤波过程中井斜角准确已知;
α22=90°:表示滤波过程中井斜角无法测量,设置井斜角固定为90 °;
α23=αtrue+ω23:表示滤波过程中井斜角可测量,但存在测量误差,ω23表示测量噪声。

表2 井斜角变化时不同α 组合滤波均方根误差(RMSE)Tab.2 Combined filtering RMSE with different α values when the deviation angle changes continuously
表1、表2的对比数据可以看出,井斜角已知和采用固定值时滤波结果差别很小;采用井斜角的实时测量值时,测量噪声将使滤波效果变差。为简化组合滤波模型并减小计算量,下面在使用该组合滤波模型时均令:

2.3 典型钻井工况仿真
为验证组合滤波的效果及陀螺仪漂移对滤波效果的影响,对导向钻井工具典型工况进行仿真。设定导向钻井工具首先工作在造斜工况,此时工具面角固定为90 °;然后是粘滑运动,此时工具面角在90 °附近以频率为0.05 Hz、幅值为20 °正弦波动;最后是稳斜钻进,此时稳定平台以9 °/s 缓慢转动,工具面角0~360 °连续变化,测试滤波器在所有工具面角下的滤波性能。为验证滤波过程中能否实时估计陀螺仪漂移,设不同工况下陀螺仪漂移分别为1 °/s、0 °/s 和2 °/s。设定加速度计测量噪声方差为 1g2,陀螺仪测量噪声方差为 100(°/s)2。
加速度计、陀螺仪和组合滤波后工具面角的对比如图2所示,加速度计测量的工具面角完全淹没在了噪声中,单独使用加速度计无法获得工具面角;陀螺仪由于有漂移,其转速积分得到的工具面角几乎随时间线性变化;组合滤波后得到的工具面角可以紧紧跟随工具面角的真实值,工具面角测量误差小于6 °。图3是组合滤波估计到的陀螺仪漂移,滤波过程中能够实时准确估计出陀螺仪漂移。

图2 仿真典型钻井工况下工具面角测量值Fig.2 Toolface estimation in typical drilling conditions by simulation
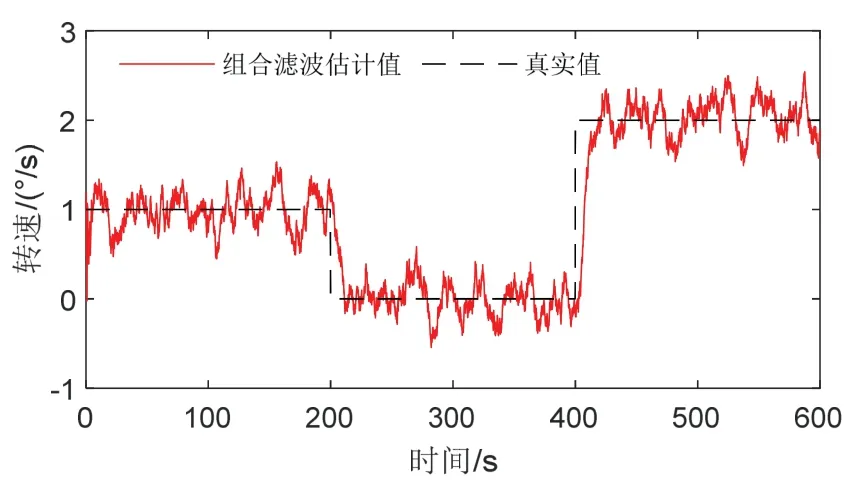
图3 陀螺仪漂移估计Fig.3 Gyroscope drift estimation
3 实验和结果
3.1 实验平台介绍
课题组自行开发的动态指向式旋转导向钻井工具原理样机如图4所示,原理样机内部含有完备的测控硬件电路,能够模拟各种典型的钻井工况。两个MMA 8451 三轴加速度计和一个HTG-1200 单轴陀螺仪安装在稳定平台仪器仓内,稳定平台半径R=0.025m 。稳定平台由电机驱动,稳定平台驱动电机连接着旋转变压器,可以采集电机转速和位置信息。实验过程中原理样机的钻铤是不旋转的,此时旋转变压器的测量值可作为转速和工具面角的参考值。

图4 动态指向式旋转导向钻井工具原理样机结构图Fig.4 Structural schematic of the prototype of dynamic point-the-bit rotary steerable drilling tool
3.2 实验设计
钻井工具的轴向振动对工具面角的测量无影响,而平行于工具面的横向振动会严重影响工具面角的测量精度。实验时将动态指向式旋转导向钻井工具原理样机水平牢固地固定在振动台上,令振动台垂直振动。开启振动时,振动台振动频率从0 Hz 快速增加到50 Hz,之后保持50 Hz 振动,关闭时振动频率逐渐减小到0 Hz,振动频率逐渐增加和减小的过程增加了振动的复杂性,能够更好的模拟钻井工况。振动台及旋转导向钻井工具原理样机实验如图5所示。
粘滑运动是钻井过程中常见的一种工况,粘滑运动是钻井工具的一种扭转振动,频率在0.05~0.5 Hz之间低频波动[13]。根据钻井工艺要求,实际钻进时工具面角波动应小于15 °[14]。控制图4中钻铤驱动电机的转速变化,即可模拟粘滑工况,考虑更为严苛的钻井工况,用幅值为20 °,频率为0.5 Hz 的正弦运动模拟粘滑工况进行实验。
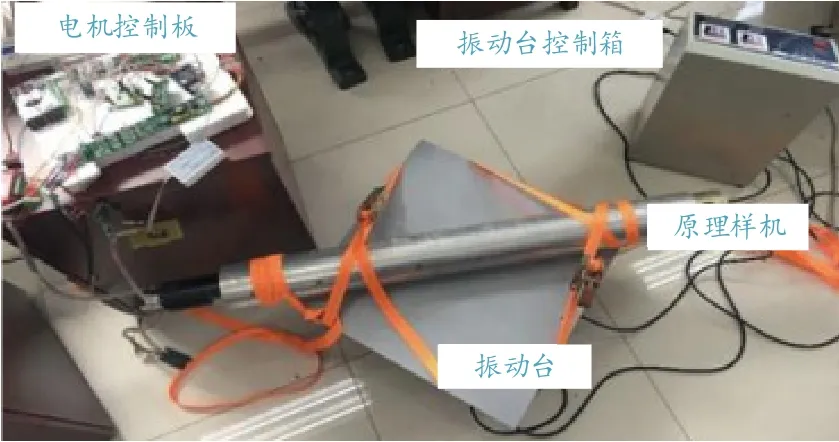
图5 振动台Fig.5 The vibration table
3.3 组合滤波实验
3.3.1 不同振动强度测试
考虑钻井过程中导向钻井工具的四种工作状态来对比自适应卡尔曼滤波算法对不同振动强度的适应性,振动强度由小到大分别为:静止不振动、粘滑不振动、静止振动和粘滑振动,各工况分别运行30 s。另外,为便于对比组合滤波效果,将双加速度计、陀螺仪的单独解算结果一并列出。
当系统过程噪声Q的大小无法准确获得时,若知道其取值范围,一般采用可能的较大值,可以在一定程度上防止滤波发散。实验时,系统采样周期Ts=0.005s,陀螺仪测量噪声协方差最大为300(°/s)2,则陀螺仪测量噪声引起的工具面角预测值的噪声协方差为:

陀螺仪零值漂移最大为200 °/h,卡尔曼滤波算法中漂移b的协方差可设为:

故系统过程噪声方差Q为:

系统观测噪声方差R初始值设置为:

振动强度变化时工具面角测量结果对比如图6所示,组合滤波得到的工具面角在振动和不振动的情况下都可以紧紧跟随工具面角的参考值,该滤波方案可以适应不同振动状态。不同方式下获取到的工具面角与参考值的均方根误差(RMSE)对比如表3所示。
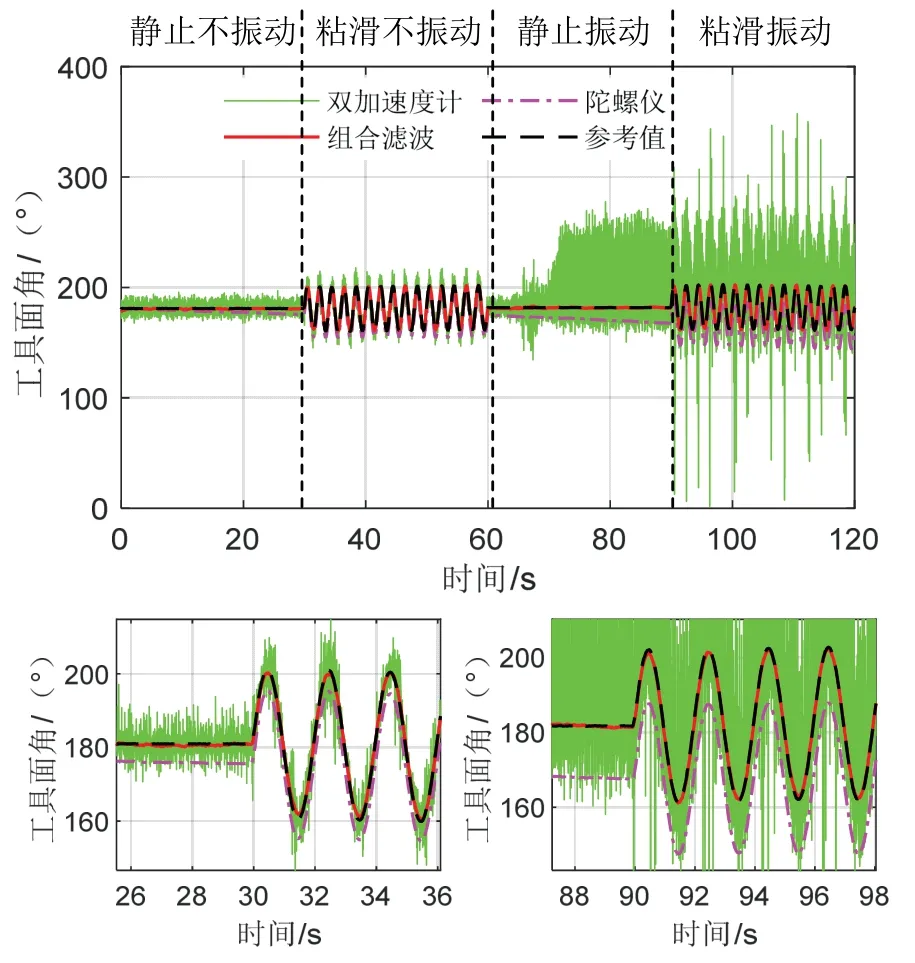
图6 振动强度变化时工具面角测量结果对比Fig.6 Comparison of toolface estimation results when vibration intensity changes

图7 模拟井下工况工具面角测量结果对比Fig.7 Comparison of toolface estimation results in lab simulated test

表3 振动强度变化工具面角测量结果均方根误差(RMSE)Tab.3 RMSE of different toolface estimations results when vibration intensity changes

表4 模拟井下工况工具面角测量结果均方根误差(RMSE)Tab.4 RMSE of different toolface estimations results in lab simulated test
3.3.2 稳定平台不同运动状态测试
为验证滤波器对稳定平台运动状态的适应性,保持上述滤波参数不变,设计了4 种典型的稳定平台运动状态进行测试。首先是工具面角稳定在180 °位置,此时稳定平台保持对地静止;然后是粘滑状态,此时稳定平台周期性地在180 °附近波动;之后是稳斜状态,此时稳定平台以36 °/s 的转速0~360 °连续转动;最后是调节工具面角,稳定平台快速转动和停止,位置阶跃变化。
双加速度计、陀螺仪和组合滤波得到的工具面角的对比如图7所示,双加速度计测量结果由于振动的影响无法解出工具面角的真实变化;陀螺仪由于含有漂移误差,积分的工具面角误差随时间线性漂移;组合滤波后工具面角可以准确跟随工具面角真实值,最大误差小于6 °。图7表明,组合滤波方案能够适应稳定平台不同运动方式,不同方式下获取到的工具面角与参考值的均方根误差(RMSE)对比如表4所示。
4 结 论
针对动态指向式旋转导向钻井工具面角难以动态准确测量的问题,本文设计了一种融合双三轴加速度计和单轴陀螺仪的组合滤波方案,采用自适应扩展卡尔曼滤波算法进行处理,多种仿真与室内模拟测试证实了该方法的有效性,组合滤波测量工具面角误差小于6 °。
1)获得一种高效的工具面角动态测量数据处理方法,该方法利用自适应卡尔曼滤波器融合了双加速度计和单轴速率陀螺仪的测量结果,有效减小了钻井过程的振动、转速波动、温度变化等参数对动态工具面角测量的影响。
2)利用了自适应卡尔曼滤波器参数调整方法,实时更新滤波器参数,准确地估计出钻井过程中陀螺仪的漂移随工作参数与环境的变化,从而大幅减弱了其对测量结果的影响。
3)本测试采用的实验室模拟测试与实际钻井环境仍有差别,下一步需要通过实际钻井环境进行测试。