基于雷达的导航信息传递系统设计
2020-10-17王立冬朱进勇
王立冬,朱进勇,王 品
(1.陆军工程大学石家庄校区,石家庄 050003;2.武警某部直升机支队,晋中 030800;3.陆军研究院,北京 100012)
在现代军事和民用领域,无人机(UAV)在中低空领域的运用越来越广泛,成为空中作战武器以及对地侦查、监视和攻击武器的一个重要发展方向。其中,导航系统是UAV 的核心信息源之一,是实现UAV 单机导航、群导航和协同作战以及实现其侦查、监视、攻击目标的重要保障。考虑到在成本、体积、抗干扰能力等方面的要求,新型UAV 多采用了微惯导系统进行导航。由此产生了微惯导系统的初始对准和校准的问题[1-3]。由于UAV 的发射方式有单独发射,也可以从母飞行器(MA)中发射,因此,实现其微惯导系统的动态初始对准或传递对准的难度就比较大;同时,考虑到目前微纳传感器的技术性能指标还不够高,基于微纳传感器的导航系统漂移误差较大,不具备长时间导航能力。因此,开展UAV 微惯导系统的对准与校准技术研究,实现其动态初始对准和校准的母平台对子平台导航信息传递,具有重要的现实与长远意义。
“雷达和激光告警”[4]可以确定来袭目标的方位角和俯仰角。如ATL 公司研制的一种高精度激光接收机对方位和俯仰到达角的测量精度接近1mrad。将这种思想应用于具有MA 与UAV 系统中,可以通过雷达波束主瓣,实现从MA 到UAV 的导航信息传递。为此,本文结合课题研究与应用背景,开展了基于雷达的导航信息传递系统研究,旨在设计将MA 导航信息传递给UAV 的系统,实现UAV 微惯导系统对准,提高其对准精度;同时,可以根据UAV 导航和任务的要求,随时对UAV 微惯导系统进行校准,保证其姿态与航向精度以及导航定位精度满足UAV 及其任务的需求。本文基于SystemVue 软件,构建了基于雷达的导航信息传递仿真实验系统。仿真实验结果证明了该设计方案的可行性。目前,尚未看到有关该技术与系统及应用等方面的报道。
1 基于雷达的导航信息传递系统组成
基于雷达的导航信息传递系统主要包括MA 和UAV 两部分,如图1所示。UAV 是一个或多个,MA与UAV 的距离为几十米到几千米。其中,MA 应包括雷达系统、高精度导航系统和通信系统等分系统。这三部分都是MA 上已有的设备;UAV 包括雷达被动测向仪、通信系统和微惯导及导航信息显示等。其中,通信系统和导航及其信息显示部分为UAV 本身具有的设备。因此,基于雷达的导航信息传递系统主要利用了MA 和UAV 上现有的设备,只增加了一台雷达被动测向仪。
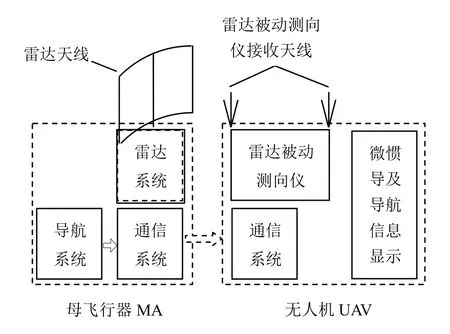
图1 基于雷达的导航信息传递系统组成框图Fig.1 Principlel block diagram of navigation information transfer system based on radar
其中,在应用背景、应用方法和应用目标等方面,基于雷达的导航信息传递系统中的雷达被动测向与目前研制使用的雷达被动测向仪具有明显的不同:后者是将雷达及其载体当作一个质点,通过测定雷达副瓣,确定这个点相对于雷达被动测向仪的方位和俯仰角;而前者将雷达当作一个刚体,需要测定的是雷达主瓣相对于雷达被动测向仪的方位和俯仰角。即基于雷达的导航信息传递系统需要研究的是测定其雷达主波瓣方位和俯仰角的雷达被动测向仪。目前国内尚未看到直接测定雷达主波瓣的雷达被动测向仪。
2 系统工作原理
2.1 基于雷达的导航信息传递原理
如图1所示。
(1)MA:由MA 的导航系统和雷达可以精确得到系统时间、自身的位置、雷达波束的北向角和俯仰角以及UAV 的位置等信息;通过无线通信系统,可将上述系统信息实时发送给UAV。
(2)UAV 上的雷达被动测向仪:可以实时测定MA 雷达波束主瓣相对于自身的方位角和俯仰角。
(3)静态方位传递原理:为了便于理解,首先假定MA 和UAV 处于相对静止状态。雷达波束主瓣在进行方位扫描,照射到UAV 的雷达被动测向仪;MA通过自己的通信系统将雷达波束主瓣的绝对方位角ψ1 发送给UAV,即UAV 通过自己的通信系统得到了MA 雷达波束主瓣的绝对方位角ψ1;UAV 上的雷达被动测向仪也可测定MA 雷达波束主瓣相对于自身的方位角ψ2;UAV 对这两个方位角相ψ1 和ψ2 进行比较,就可计算得到UAV 的绝对方位角ψ3,从而实现了由MA 到UAV 的方位传递。
(4)利用ψ3 就可以对UAV 的微惯导系统进行方位对准与校准。
(5)动态方位传递原理:当MA 和UAV 处于相对运动状态时,上述静态传递过程变成了一个瞬时传递过程。雷达波束在进行方位扫描,照射到UAV 的雷达被动测向仪。MA 通信系统将雷达波束主瓣的绝对方位角和系统时间连续地发送给UAV,UAV 通过自己的通信系统连续接收到MA 雷达波束主瓣的绝对方位角和系统时间;UAV 上的雷达被动测向仪连续地测定MA 雷达波束主瓣相对于自身的方位角,并将该方位角数据存贮;比较相同时刻的两个方位角数据,就可以得到该时刻UAV 的绝对方位角,从而实现了MA 到UAV 的方位的实时传递。进而实现UAV 的动态方位对准与校准。
(6)俯仰角传递原理与过程:与上述(3)、(4)、(5)相同。
综上,基于雷达的导航信息传递系统,MA 通过自己的雷达波束主瓣将导航信息传递给UAV,从而实现在发射时对UAV 的微惯导系统进行初始对准,在执行任务时对UAV 的微惯导系统进行校准。
2.2 改进的快速求根的对称压缩测向算法
雷达被动测向包括比幅测向[5]、相位雷达干涉仪测向[6]、多普勒测向[7]、空间谱估计测向[8]等方法。各种方法的优缺点比较如表1所示。

表1 雷达被动测向方法比较Tab.1 Comparison of the methods of radar passive measuring direction
由表1可得,空间谱估计测向算法是目前测向精度和分辨率最高,最具发展前途的一种算法。本文以MA 向UAV 传递导航信息为背景,从传统的多重信号分类(MUSIC)算法理论[9-11]出发,融合对称压缩的思想,改进设计了一种快速求根的对称压缩测向算法(Root-MSCS)—基于MSCS(MUSIC symmetrical compressed spectrum)的求根算法(Root-MSCS)。即在原MSCS 算法基础上,提出在半谱内定义一个多项式来替代导向矢量。这样,在半谱内不进行谱峰搜索,就可以得到真实信源和镜像信源的主瓣波达方向(DOA)。然后,通过极值判断,去除镜像信源产生的根,即可得到真实信源的DOA。根据Barabell 提出的PiUAVrenko 分解[12],定义一个多项式

式中ei为数据协方差矩阵中的小特征值(将所有特征值中的真实信源和虚拟信源对应的大特征值去除掉)对应的M-2N个特征矢量,p(z)=[1,z…zM-1]T。当(λ为信源载波波长,d为接收天线阵列阵元间距,θ为信源入射到阵元上的入射角)时,p(z)正好是信号的导向矢量,即p(z)=a(θ)(a(θ)为阵列导向矢量)。因此,可以定义多项式

式中UN为噪声子空间,为UN的共轭。根据正交性原理,求得式(2)中的根就可以获得真实信源和镜像信源的DOA。但在式(2)中,不仅含有z的多项式,还存在z*的幂次项。由于单位圆上的z值才是我们感兴趣的信息,因此利用单位圆上的共轭关系z*=z-1,对式(2)进行修正可得

从式(3)可以看出,多项式f(z)的阶数为2(M-1),也就是说其存在M-1对根,每对根为相互共轭的关系;在M-1对根中,刚好有2N个根z1,z2…z2N分布在单位圆上。因此,只需要从多项式中找到接近单位圆的根即可得到DOA,对于ULA(Uniform Linear Array,等距均匀线阵)来说,可以根据式(4)得到[12]

采用MATLAB,对该算法的DOA 估计所用时间和信噪比(SNR)变化关系进行了仿真。仿真结果表明,Root-MSCS 的DOA 估计时间为 0.1738×10-2s,比 MSCS 算法的运算速度快 10 倍,相对于Root-MUSIC 算法的运算速度也有明显提高,完全满足导航信息传递的实时性要求。
3 基于SystemVue 的系统仿真
3.1 仿真实验系统
仿真实验系统主要分为三部分,一是雷达微波信号的发射部分(TX),二是来波信号的接收部分(微波测试系统)(RX),三是来波信号的处理部分。三部分均采用SystemVue 软件中的模块进行仿真。仿真流程图如图2所示。
该系统仿真模拟了MA 发射信号和UAV 接收信号以及对接收信号进行波达方向角估计的全过程。其中,MA 的雷达发射信号选用SystemVue 中Radar MArts 中的LFM(线性调频)信号,信号的脉冲宽度(PW)设置为10 us,脉冲重复间隔(PRI)为10-4s,相应的脉冲重复频率(PRF)为PRF=1/PRI;带宽设置为5 MHz,采样频率为40 MHz。Radar LFM 模块为线性调频信号产生器,通过设置其生成形式和参数大小,如脉冲宽度、脉冲重复间隔、波形带宽和基带采样率等,产生所需要的线性调频信号;雷达微波信号经过天线发射以后进入UAV 的微波接收部分,依次进入 Radar_Phased ArrayRx 模块、Radar MultiCH_Rx 模块和Rx_DBS_2D 模块,进行信号接收处理;初步处理的信号经MAck_M@Data Folw Models 模块阵列打包后,在MathLang 模块中进行算法处理,采用了2.2 中Root-MSCS 算法对波达方向进行快速估计。
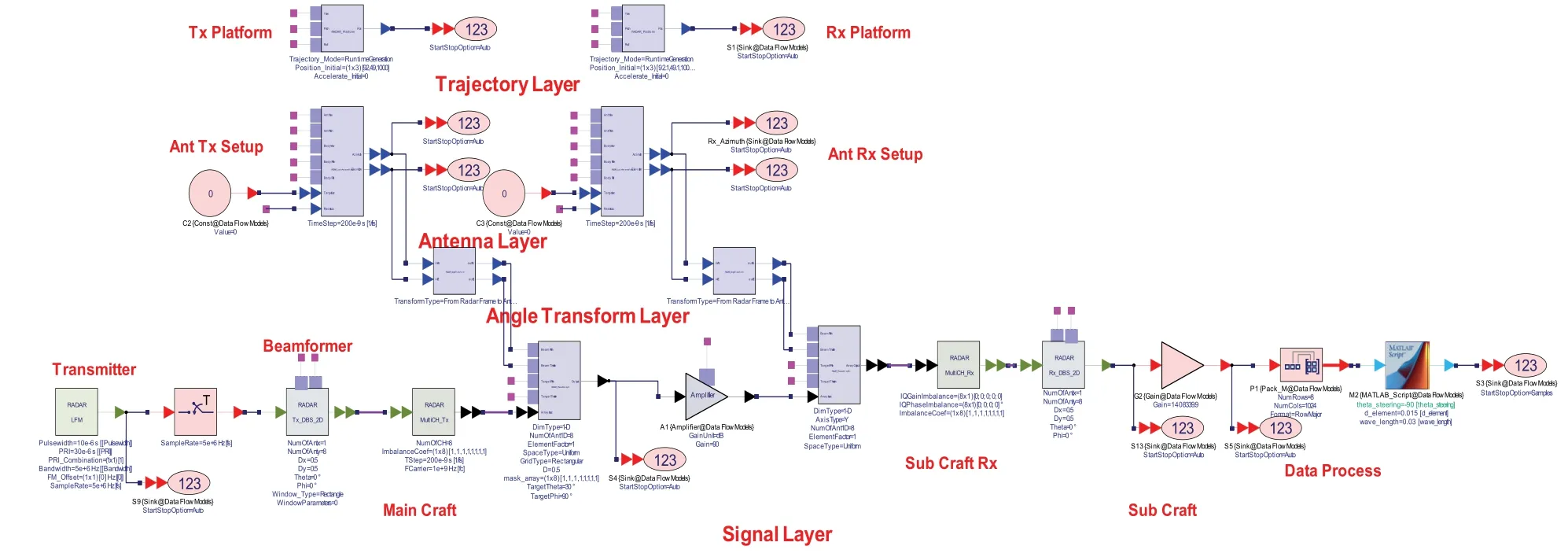
图2 仿真实验系统流程图Fig.2 Flow chart of the simulation lab system
3.2 仿真实验结果与误差分析
针对雷达与测向仪相对静态、相对运动两种情况进行了仿真实验。仿真实验数据与处理结果如表2所示。由表2可知,雷达被动测向仪测量雷达主瓣的测量误差≤0.45 °。

表2 仿真实验数据与数据处理结果(单位:°)Tab.2 Simulation lab data and processing results (unit: °)
假定MA 的导航定位误差为零,则基于雷达的导航信息传递误差主要包括:
(1)系统时间误差产生的传递误差:由于MA、UAV 都采用北斗或GPS 授时,因此,时间误差在纳秒级,近似为零,由此产生的传递误差可以忽略不计。
(2)雷达被动测向测量误差:由表2可得,雷达被动测向测量误差≤0.45 °。
(3)通信时延造成的UAV 动态误差:MA 的导航信息由MA 通信系统以无线方式传输给UAV 通信系统,需要一定的时间,这个时间被称为通信时延。由于UAV 处于动态,在通信时延内,UAV 的姿态相对于MA 发送导航信息时刻发生了变化。这种UAV姿态在通信时延内发生的变化,被称为通信时延造成的UAV 动态误差。
通信时延主要包括数据发送时间、空中传输时间与接收时间。设飞行器采用TCR×××电台,信息传输速率为19.2 kbps,传输方位信息需要32 位,则发送时间为32/19200=1.67 ms;同理可得,方位信息接收时间也为1.67 ms;设MA、UAV 相距500 m,则空中传输时间为500/300000=0.0017 ms。同时考虑这三种情况,通信时延为3.3417 ms。
在进行导航信息传递时,要求MA、UAV 姿态尽量保持相对稳定。假设此时飞行器方位转动角速率为5 °/s,则由通信时延造成的UAV 方位动态误差为
5×0.0033417=0.0167085 °=0.27903195 mil
导航系统的方位误差一般大于1 mil。通信时延造成的UAV 动态误差远小于1 mil,因此,通信时延造成的UAV 动态误差一般可以忽略不计。
由(1)、(2)和(3)三种导航信息传递误差分析可得,基于雷达的导航信息传递误差可取为雷达被动测向测量误差:≤ 0.45 °。
4 结 论
由上述设计的基于雷达的导航信息传递系统可得,基于雷达的导航信息传递,将雷达当作一个刚体,采用雷达被动测向仪,测定雷达主瓣相对于雷达被动测向仪的方位和俯仰角,可以实现从MA 到UAV 的导航信息传递。由基于SystemVue 的系统仿真结果与分析可得,雷达被动测向仪采用Root-MSCS 算法测定雷达主瓣的方位,导航信息传递误差≤0.45 °。而UAV执行任务时,对导航信息的精度要求并不是很高,一般为不大于0.5 °。因此,基于雷达的导航信息传递可以满足UAV 动态初始对准、传递对准或校准的要求,从而保证UAV 的姿态与航向精度以及导航定位精度满足UAV 飞行及其任务的需求,以实现UAV 长时间自主导航与飞行,实现其进攻与防御作战、精确打击与独立作战等战术目标。并且,随着雷达被动测向技术的成熟与发展,基于雷达的导航信息传递误差将会越来越小。可以说,基于雷达的导航信息传递系统在UAV 等领域,具有广阔的应用前景。
