基于四分频四态调制的光纤陀螺光路功率监测方法
2020-10-17赵亚飞张宇飞刘保林
赵亚飞,李 勇,张宇飞,滕 飞,刘保林
(1.北京控制工程研究所,北京 100190;2.空间智能控制技术重点实验室,北京 100190)
光纤陀螺光路功率是指到达探测器的有效功率,受光源出纤功率、耦合器、Y 波导、光纤环、探测器等多器件影响,决定了光纤陀螺信噪比,对零偏稳定性等性能影响较大。空间飞行器用光纤陀螺一般面临着严苛的空间辐照环境,从而带来光源等器件性能的恶化[1,2]。工程上一般采用主备份光源方式增加可靠性[3],即当光源出纤功率下降到一定程度后切换为备份光源;还可采用光源自动控制方式对光路功率进行实时补偿,以上两种方式都需要对光路功率进行监测,作为故障诊断和备份措施实施的依据。
目前常用的光路功率监测方法有两类。一是在光电探测器后端并联一条检测支路或者在光源连接的耦合器空头端熔接另一个光电探测器,然后通过运算放大器及A/D 转换器间接获取光功率;二是采用SLD两端电压监测来获取器件的出纤功率[4],其中方案一应用最为成熟,但是需要增加一系列硬件甚至是光学器件,因此不利于光纤陀螺小型化发展。
本文设计了一种基于四分频四态方波调制的光路功率监测技术,通过一种独特的调制、解调方式在完成正常闭环工作的同时实现光功率监测。该技术实现简单、无需增加硬件、占用资源少、不引入干扰。
1 四分频四态调制获取光功率原理
1.1 传统二态方波调制解调原理
目前广泛采用的光纤陀螺是基于Sagnac 效应的干涉型角速率测量装置,即将光纤陀螺绕输入轴的转速最终转化为干涉光的强度,通过对光强信号的检测感知转速,光强与角速率Ω之间的关系如下式所示。

其中,I0为入射光光强,L为光纤环长度,D为光纤环等效直径,λ为光的波长,c为光在真空中的传播速度,Ω为输入角速率。
(1)传统二态方波调制
光纤陀螺目前多采用全数字闭环方案,基于二态方波调制解调技术来实现微弱信号的检测[5]。为了获取最大灵敏度一般采用±π /2,在高精度光纤陀螺中也采用 ±3 π /4或 ±7 π /8等深度调制方式以获得更高的信噪比。二态方波调制波形(以±π /2为例)如图1(a)所示,其中Dn为施加的数字调制量,ΦBCW为顺时针方向传播的光受到的偏置调制相位波形,ΦBCCW为逆时针方向传播的光受到的偏置调制相位波形,ΦB为经过偏置调制后两束相向传播光之间的调制相位差。

图1 (a)二态方波调制(b)探测器输出Fig.1 (a)Two-state square wave modulation (b)Detector output
(2)传统二态方波调制下解调过程
±π /2二态方波调制下无角速率输入时调制波形及探测器输出波形对应关系如图1所示。两个二态调制半周期τ(渡越时间)对应光功率分别如下式所示。
由于全数字闭环光纤陀螺在PINFET 输出端一般采用隔直方案,即将直流量进行剔除,到达AD 转换器的信号为交流信号,则解调后对应光功率数字量为:

其中K为光路功率、前向通道增益、AD 转换系数的乘积。
如图1(b)所示D(x1)-D(x2)为对应光纤陀螺的角速率误差值,即解调数字量。积分后为对应输入角速率值,即二态方波调制解调结果耦合了光路功率和角速率,是一个综合性结果。由于在正常闭环工作状态下,输入相位差是反馈相位和输入角速率带来的非互易相位的代数和,接近于0,因此即闭环情况下解调结果不受光功率与前向通道增益的影响。因此传统二态方波调制方式闭环状态下无法实时获取光功率值。
1.2 传统四态方波调制解调原理
(1)传统四态方波调制
传统的四态方波调制方式中调制信号的周期依然为2τ,每个τ中一般有两个状态,调制方波波形(以+π/4、+ 3π/4、-π/4、-3 π/4 为例)如下图所示,该调制方式由于其特殊性,常被用于2π 电压快速闭环[6]、干涉仪误差量测量、抑制调制串扰等场合[7-10]。
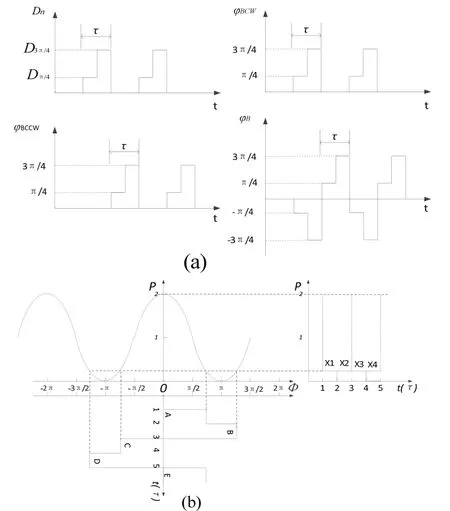
图2 (a)传统四态方波调制(b)对应探测器输出Fig.2 (a)Traditional four-state square wave modulation(b)Corresponding detector output
(2)传统四态方波调制下解调过程
传统四态方波调制下无角速率输入时调制波形及探测器输出的波形对应关系如图2所示[11]。
通过传统四态方波调制方式可以解调出转速D(ω)和复位误差D△2π。

由上式可知,传统四态方波调制解调结果耦合了角速率值或2π 电压,且闭环情况下不受光功率影响,因此无法获取光功率值。
1.3 四分频四态方波调制解调原理
(1)四分频四态方波调制
本文设计了四分频四态方波调制方式,调制方波频率为光纤陀螺本征频率的四分频,即周期为8τ,分为四个调制相位状态,依次为+π/4、+ 3 π/4、-π/4、-3 π/4,每个状态持续时间为2τ。调制信号波形如图3(a)所示。

图3 (a)四分频四态方波调制 (b)对应探测器输出Fig.3 (a)Quad-frequency and quad-state square wave modulation (b)Corresponding detector output
(2)四分频四态方波调制下解调过程
采用四分频四态调制方式的调制波形和探测器输出波形在无角速率输入的状态下关系如图3(b)所示。
由图3可以发现采用B 拍和F 拍效果为±π/2 调制,则根据光纤陀螺基本原理可知,D(B)-D(F)即可获得陀螺的角速率误差,通过积分即可获取陀螺的角速率值;经过归一化后可以发现A 拍、C 拍、E 拍、G 拍均对应光纤陀螺的光功率值,而D 拍、H 拍则对应光纤陀螺的零功率值,因此通过公式D(A)+D(E)-D(D)-D(H)即可间接获得光纤陀螺的光功率值P,且该光功率和角速率无关。
2 有效光功率自主监测实现
四分频四态方波调制方式可以同时获取光功率和角速率数据,只是角速率闭环周期由原来的2τ变成了8τ,由于单次解调使用的有效数据相同,基本不影响精度,只是对响应带宽造成一定影响。由于光纤陀螺渡越时间τ一般为1 μs~25 μs,而数据使用周期一般为10 ms 以上量级,因此即便长时间工作在8τ的闭环周期下对于带宽影响很小。
本方案实际实现过程中为了最大程度上保证光纤陀螺自身闭环的有效性,对软件流程进行了充分考虑,在正常的光纤陀螺闭环程序中加入了光功率自主监测代码,具体流程框图如图4所示。
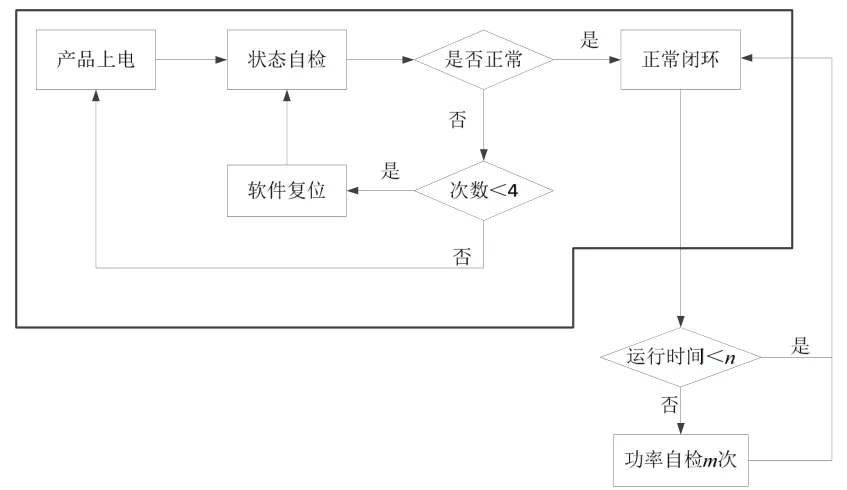
图4 光功率自主监测的软件流程Fig.4 Software workflow for autonomous monitoring of optical power
图4中,虚线框内为原有光纤陀螺正常软件流程,包括产品状态自检,正常闭环过程等,新加入的为下方的功率自检模块。运行过程中,光纤陀螺在完成正常启动后工作在正常二态调制闭环状态下,同时开始计时,计时时长可根据实际需要设定,当到达该时间后进行光功率自检,自检完成后将光功率数字量打包到对外发送的数据上下传,并转入正常闭环程序中。
光功率自检模块主要包括四分频四态调制时序产生功能、模式切换控制功能、四分频四态调制解调功能、数据打包发送功能等几部分。
2.1 四分频四态调制时序产生功能
四分频四态调制时序需要和光纤陀螺本身的二态调制时序兼容。
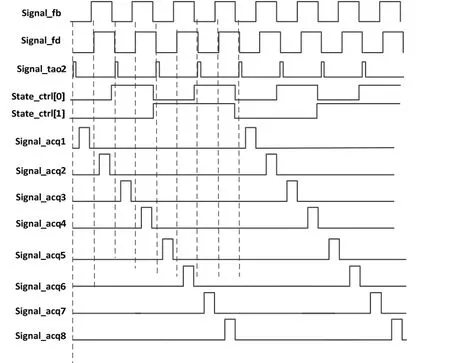
图5 四分频四态调制解调典型时序信号Fig.5 typical timing signal of quad-frequency and quad-state modulation and demodulation
如图5所示,四分频四态调制时序主要包括四态控制寄存器 State_ctrl[1:0]、采点选通信号signal_acq1~signal_acq8,用于确定调制施加的时机和解调过程中数据采集的时机,其中Signal_fb 为正常二态方波调制控制信号,Signal_fd 为解调控制信号,二者周期为2τ,Signal_fd 相对于Signal_fb 考虑了AD和DA 器件的转换延时;Signal_tao2 为二态方波调制解调完成的标志,周期为2τ;State_ctrl[1:0]为四分频四态调制状态寄存器,控制和指示四个状态的转换;Signal_acq1~Signal_acq8 为解调过程采点选通信号,控制各状态采点位置和个数。
2.2 模式切换控制功能
模式切换控制功能基于状态机实现,如下图所示,在完成自检之后主要是二态方波调制和四分频四态调制方式之间的切换,主要包括运行时间的监控和自检次数的监控,涉及到参数n和m的设定。
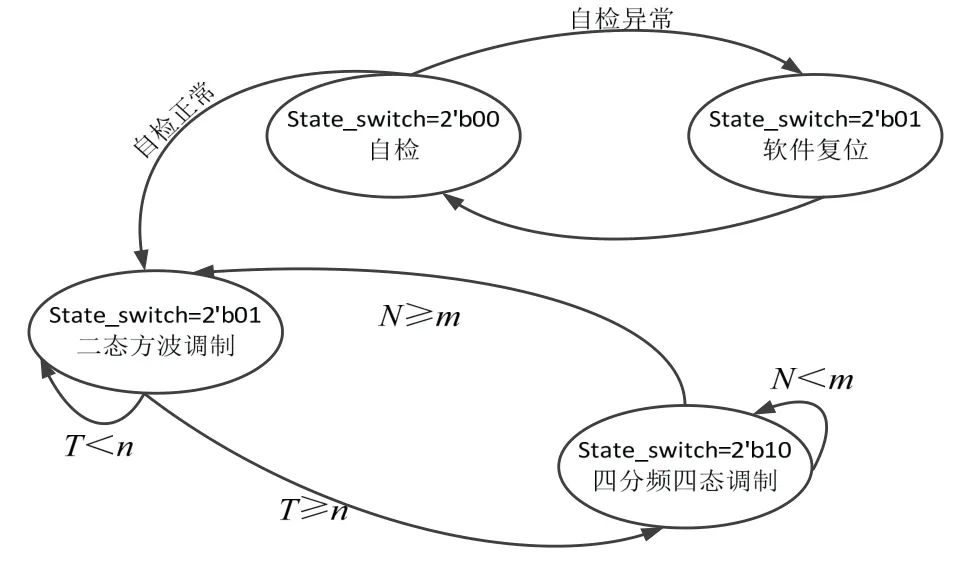
图6 模式切换控制状态机图示Fig.6 Diagram of state machine of mode-control
2.3 四分频四态调制解调功能
本部分功能主要是在2.1 中产生的时序信号的控制下实现角速率信息和光功率信息的解调,该部分状态机的切换如图7所示。
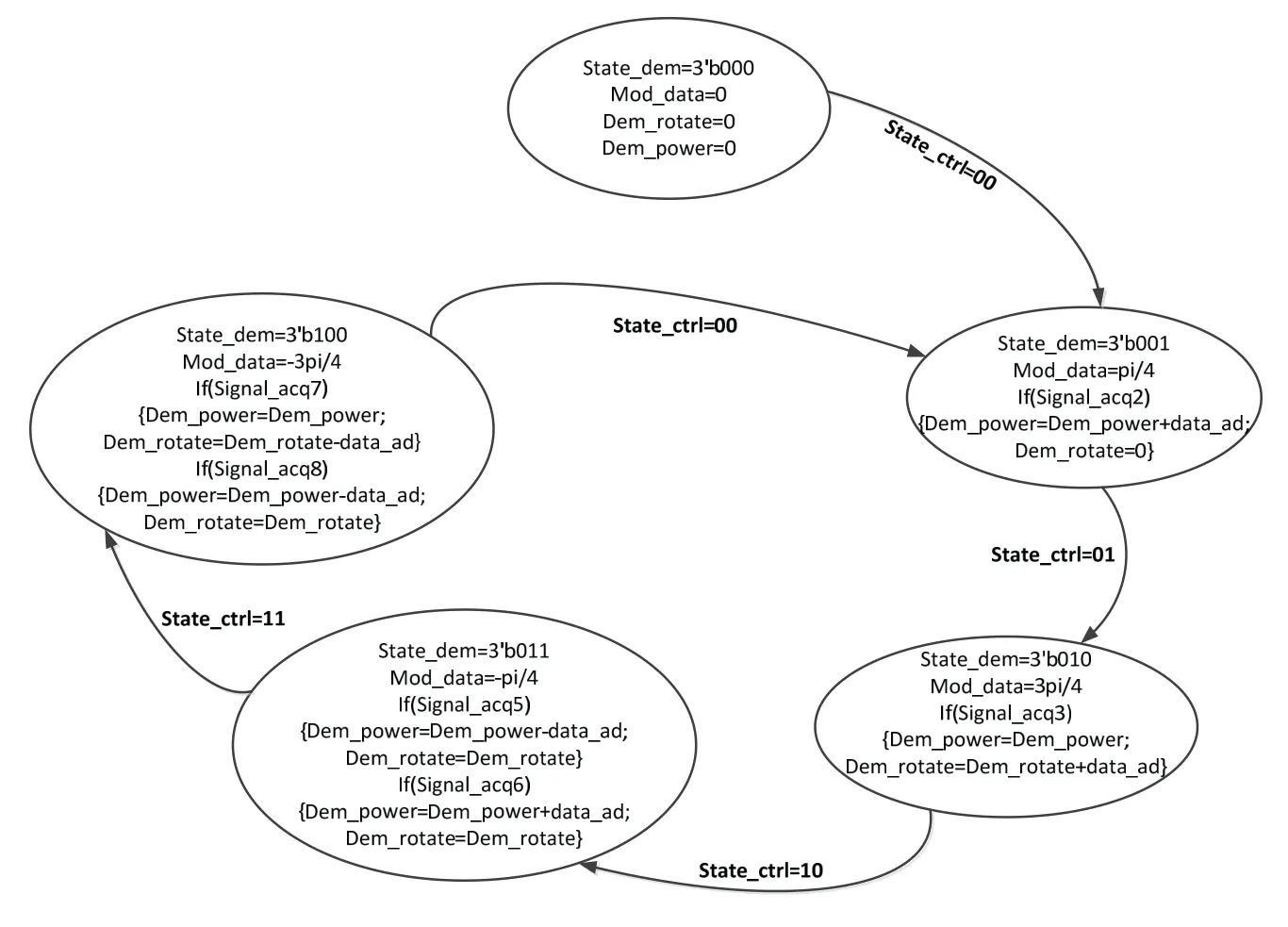
图7 四分频四态调制解调状态机图示Fig.7 Diagram of state machine of quad-frequency and quad-state modulation and demodulation
2.4 数据打包发送功能
本部分功能主要是将光功率信息和角速率信息打包成一个数据包按照设定的波特率发送出去。为了产品接口的一致性,需要对软件部分发送的字节数进行调整,在原有陀螺速率等有效字节数基础上增加3 个字节表征光功率,两次更新之间保持上一次的值不变。
3 有效光功率自主监测方法验证
本方法在典型中等精度光纤陀螺产品上进行了试验,为了简化计算过程,将陀螺放置于具有独立地基的大理石平台上保证单一变量(角速率ω),然后改变光源驱动电路中恒流的电流值,从而达到改变陀螺光源输出光功率的效果。以中等精度光纤陀螺验证为例,验证中设定切换时长n=100 s,自检次数m=10 次,即每隔100 s 自检10 次,并将数据打包发送。
3.1 光功率监测功能测试
实验中设定典型光源驱动电流值,探测器跨阻200 KΩ,获取的对应的数字量如表1所示。
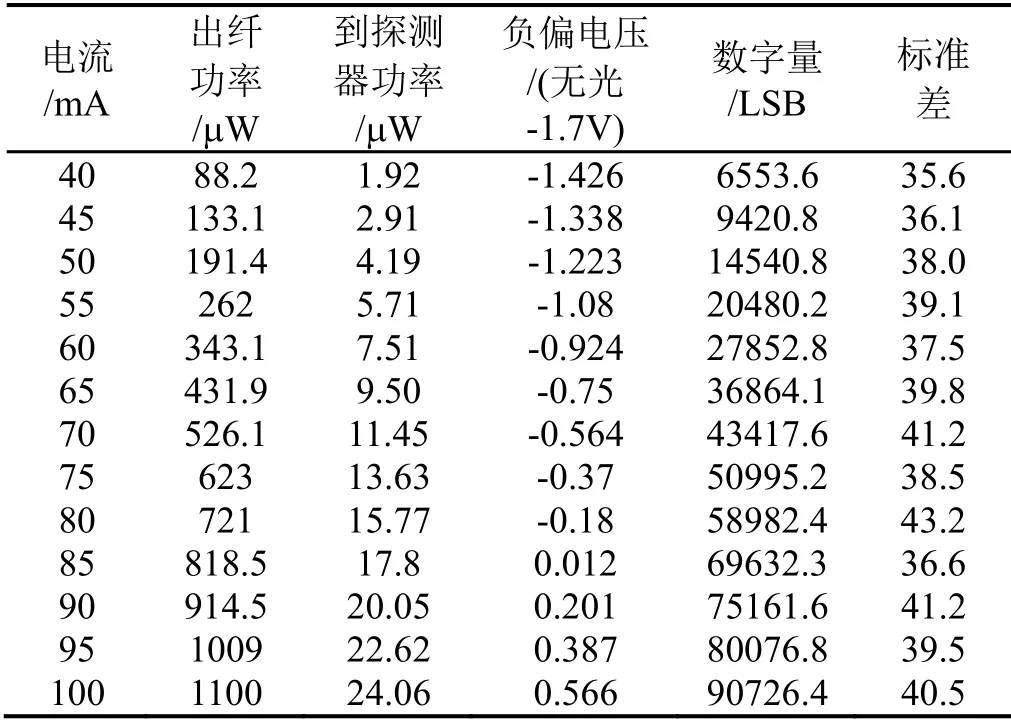
表1 光功率监测功能测试结果Tab.1 Test results of monitoring function of optical power
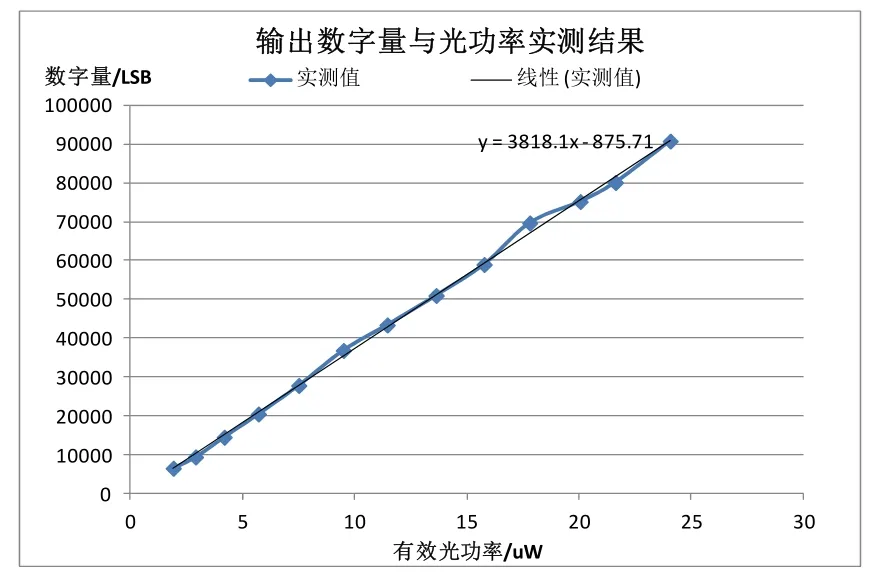
图8 光功率监测实测D-P 曲线Fig.8 D-P curve of optical power monitoring
根据表1和图8可知,解调数字量和光路功率呈线性关系,可以用于表征光纤陀螺的光功率。其中拟合曲线的斜率体现检测的分辨率,标准差体现检测的精度。
可得检测分辨率:

可得检测精度:

3.2 光纤陀螺性能测试
(1)零偏稳定性测试
采用典型中等精度光纤陀螺仪产品,零偏稳定性≤0.01 °/h(1 σ,100 s),设置若干典型离散光源驱动电流值,采用本方案的光纤陀螺精度测试结果如下表所示。从结果可知,由于采用了间歇性四分频四态调制方案(每100 s 常规二态调制后120 μs 四分频四态调制模式),因此实际测试结果表明该使用方式下对光纤陀螺的零偏稳定性基本无影响,满足使用要求。
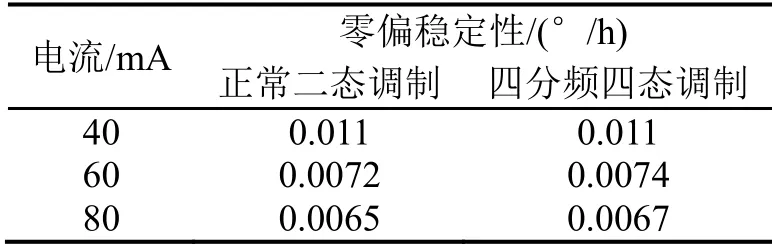
表2 带光功率监测功能性能测试结果(静态)Tab.2 Test results of performance with monitoring function of optical power(static)
(2)带宽测试
光纤陀螺的带宽测试一般通过角振动台模拟输入,然后测试产品的响应来完成。由于光纤陀螺本身带宽较高,一般为KHz 量级,但是应用中采样周期一般在50 Hz 以下,并且限于角振动台给出的信号频率较低、实际采集设备采集速率有限,本验证环节采用50 Hz 角振动频率作为最大输入,衡量产品在50 Hz及以下频段的响应,验证四分频四态调制方式对带宽的影响,结果如表3所示。

表3 带光功率监测功能性能测试结果(带宽)Tab.3 test results of performance with monitoring function of optical power(bandwidth)
由表3可知,含有四分频四态调制方案在50Hz以下典型频率的应用中对于光纤陀螺的带宽无影响,满足正常使用。
4 结 论
通过采用基于四分频四态调制方案,可以很好地完成光纤陀螺有效光功率自主监测功能,该方法实现简单,在典型中等精度光纤陀螺用200 KΩ 跨阻探测器输入功率0~25 μW 范围时,可以获取优于0.5 nW的检测分辨率和优于20 nW 的检测精度,动态范围优于49 dB,同时不影响光纤陀螺精度、带宽等典型性能指标,可以进一步推广应用。由于本产品为单通道中等精度光纤陀螺仪,其软件也基于单通道调制解调实现,当应用于检测电路同时完成多路光路调制解调功能的场景或其他更复杂场景时需要进行适应性修改。
