平面拟合算法抗干扰能力对比研究
2020-10-10雷经发何玉张淼孙虹李永玲
雷经发,何玉,张淼,孙虹,李永玲
(1.安徽建筑大学 机械与电气工程学院,安徽 合肥 230601;2.安徽省工程机械智能制造重点实验室,安徽 合肥 230601;3.过程装备与控制工程四川省高校重点实验室,四川 自贡 643000)
0 引言
近年来,三维激光扫描技术得到了快速发展,它对物体的三维模型重建起到了巨大的作用,提高了目标物体的三维模型重建的效率,而三维激光扫描技术得到点云数据进行建模[1]成为国内外学者关注的问题。
平面特征是机械零部件中最为常见的轮廓特征之一,利用一系列方法对相关机械零件点云数据来提取平面特征,其中在大量点云数据中得到所需要的平面特征采取的方法有最小二乘法[2]、随机抽样一致性法[3-4]等。点云数据平面拟合过程中,如果只考虑观测向量的误差,可采用最小二乘法获取参数。但是由于仪器精度、人为因素以及遮挡物等各种因素,扫描仪得到的点云数据往往存在噪声点甚至是离群点,噪声点指基本符合理论平面方程或有较小误差的点云数据,而离群点则指偏移较大的点云数据。随后,国内外学者对加权最小二乘法进行深入研究[5-7],其方法可以减小干扰点影响,并且用于点云平面拟合[8-9]。由于部分零部件点云数据中存在大量干扰点,随机抽样一致性算法可以在大量点云数据中分割得到平面特征。虽然国内外对最小二乘法[10]、加权最小二乘法、随机抽样一致性算法[11-13]做了大量的研究,但是,这三种方法的拟合精度存在差异,缺少对于平面拟合效果的对比研究。针对这一问题,本文通过仿真数据和实测数据对比这三种方法的精度,该研究对物体重建、逆向建模等具有重要的意义。
1 最小二乘法平面拟合
最小二乘法平面拟合主要是通过已知点云数据的坐标值xi、yi、zi来拟合平面,利用xi、yi拟合得到的函数值̂ 与实际值zi之差的平方最小。根据数据点(xi,yi,zi)(i = 1,2,…,n),将平面方程记为f( x,y )= pΤ( x,y )A,AΤ=( a,b,c )是平面方程的系数,其中PΤ是该平面方程的基函数,其中本文取pΤi=( xi,yi,1 )。
由最小二乘法的定义可得:

为使J( )A 中对平面方程的系数最小的结果,可将公式(1)改为:

为了求出上式的解,定义


2 加权最小二乘法平面拟合
2.1 权函数
在平面拟合过程中,点云数据中经常会有大量的噪声点和离群点。加权最小二乘的原理为:点云数据中每个样本点都有不同大小的偏差,对不同的样本点赋予不同的权重,其中偏差大的样本点权重小,偏差小的样本点权重大,这样可以避免一些异常点在平面拟合过程中造成平面拟合精度较低的问题。其中权函数w( x,y )在加权最小二乘法中起着非常重要的作用。由于权函数种类繁多,例如‘fair’、‘cauchy’、‘logistic’分 别 为 w( x,y )=1./( 1 + abs( r ))、w( x,y )= 1./(1 + r.^2)、w( x,y )=tanh(r)./r,其中r = uh(x,y)- u(x,y),由于三种权函数效果基本差距不大,本文中选用‘cauchy’权函数。
2.2 加权最小二乘法数学模型
定义在某一区域Ω 的函数为u(x,y),且函数u(x,y)在该区域Ω 内存在n 个点,取函数

为函数u(x,y)的逼近函数。然而pTi=(xi,yi,1)是基函数,其中m 是其基函数的个数,a(x,y)是函数u(x,y)中对应的系数。
其中系数ae(x,y)为使下面定义的函数取得极小值。

上式中w(xi,yi)是具有减小平面拟合误差的权函数,为了求出上式的解,定义
其中矩阵A(x,y)和B(x,y)为:
A(x,y)= PTw(x,y)P
B(x,y)= PTw(x,y)
由(6)式可求得a(x,y)。
3 随机抽样一致性算法(RANSAC)
RANSAC 算法原理为:进行参数估计时,对数据进行区分处理。首先针对一个具体的问题设计判断规则,利用其判断规则来剔除不符合规则的数据,然后通过输入符合规则的数据来估计参数。
随机抽样一致性算法的参数估计要求在一定概率下,基本子集最小抽样数k 与至少获得一个良性子集的概率P 满足相应的关系为:

其中,w 是模型内点的比例;n 为计算模型参数最小数据量是3;P 的取值一般在0.95-0.99。
RANSAC 算法是一种稳健的参数估计算法,可采用此算法进行平面拟合的过程如下:

(2)选取合理的阈值t,如果di≤t 就被认为是平面内点,得出此平面内点个数N;
(3)然后重复以上步骤m 次,比较选择内点最多的平面。
4 实验分析
4.1 仿真数据
根据点云数据平面方程z = 0.707x + 0.707y +1,利用matlab 随机从此平面选取500 个点,利用matlab 中rand 函数随机改变部分点的z 坐标值,使其坐标值z 在原来幅值基础上(-5,5)范围内随机改变,从而引入噪声点,随机选择部分点使其z 原来坐标值幅值上增加20,从而引入离群点,然后分别使用最小二乘法(LS)、加权最小二乘法(WLS)、随机抽样一致性算法(RANSAC)对上述点云数据进行参数估计,其中把平面内点个数N 作为平面拟合精度的评判标准,当平面内点个数较多时,说明算法效果越好。其中为了得到统一的评判标准适当地把阈值设为0.01 和随机抽样一致性算法中重复步骤m 设为1000。通过选取适当的噪声点或者离群点进行实验来验证不同算法的效果,通过各种算法拟合平面的相应参数和平面内点个数N 如表所示。
由表1 可得,点云数据中仅存在噪声点时,随机抽样一致性算法中平面内点个数最多,且个数为除噪声点外都为内点,加权最小二乘法的个数次之,最小二乘法的个数最少,由此得最小二乘法拟合效果不好,加权最小二乘法和随机抽样一致性算法都可以拟合较好的参数,其中随机抽样一致性算法精度最高;由表2 可得,点云数据仅存在离群点时,最小二乘法中平面内点个数较少,加权最小二乘法和随机抽样一致性算法中内点个数依次增多,由此得最小二乘法效果较差,随机抽样一致性算法比加权最小二乘法精度要高;由表3 可得,点云数据中同时存在噪声点和离群点时,利用LS 方法拟合的平面系数中出现较大偏差,是因为干扰点的影响较大,最小二乘法中内点少,加权最小二乘法比最小二乘法中平面内点个数多,随机抽样一致性算法中除噪声点和离群点外都属于内点,由此得最小二乘和加权最小二乘拟合效果较差,而随机抽样一致性算法比较稳定。

表1 点云加20个噪声点且阈值为0.01的拟和参数及个数
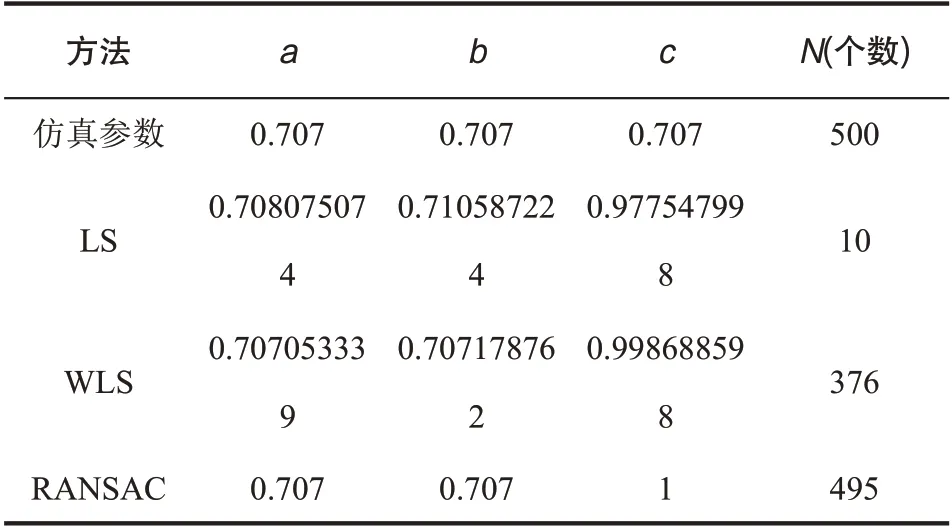
表2 点云加5个离群点且阈值为0.01的拟和参数及个数

表3 点云加20个噪声点和10个离群点且阈值为0.01的拟和参数及个数
4.2 实测数据
为进一步验证随机抽样一致性算法的抗干扰性,采用3D 线激光传感器ECCO95.100 获取点云数据,扫描的对象为斜垫铁的倾斜面。由于利用3D 线激光传感器得到的点云数据较多,可以先利用点云降采样,其中点云降采样为利用MATLAB中点云函数来百分比的降低原始点云的数量,使其所测点云数据为1463 个,如图1 所示。分别通过最小二乘法、加权最小二乘法、随机抽样一致性算法来拟合真实斜铁倾斜面,其中随机抽样一致性算法中重复步骤为1000,然后设定统一的阈值为0.1来判断算法的效果。
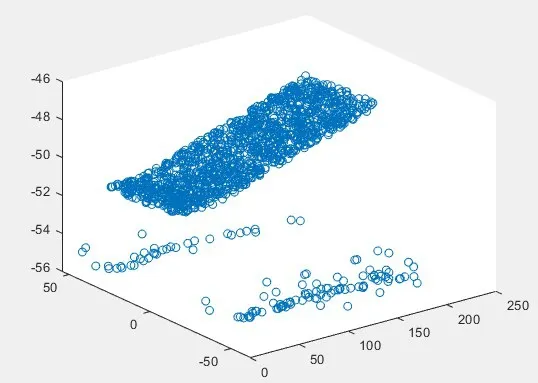
图1 斜垫铁点云降采样数据
通过表4 可得,最小二乘法和加权最小二乘法中平面内点个数较少,而随机抽样一致性算法中内点个数较多,故随机抽样一致性算法拟合平面比最小二乘法和加权最小二乘法抗干扰性更好,且精度最高。

表4 三种方法拟合参数及内点个数
通过上述仿真实验和实测实验可以得到当点云数据中存在噪声点、离群点和两者都有的实验数据中,最小二乘法由于利用所有的数据点去拟和平面,在文中添加干扰点进行算法拟合平面系数过程中干扰点影响算法效果,得到的平面拟合参数精度不高;加权最小二乘法由于存在权函数,权函数使干扰点的权重减小,考虑到降低干扰点的影响,其算法拟和平面参数精度较最小二乘法高;随机抽样一致性算法中找出内点最多的平面,干扰点比例小的环境下大概率可以避免干扰点的影响,所以该算法在三种算法中拟合平面参数精度最高。
5 结论
本文详细阐述了三种点云拟合平面算法,根据在不同实验环境下来具体拟合平面参数从而求得内点个数。然后,通过编制的MATLAB 算法对模拟的点云数据和斜铁倾斜面的点云数据进行计算,把内点个数作为拟和效果的指标,分析结果表明:本文三种算法均可以进行平面拟合得到平面系数,且在干扰点数量少和影响较小的情况下拟合的平面系数接近真实值,而在干扰点数量多和影响较大的情况下加权最小二乘法存在权函数降低干扰点权重比最小二乘法精度高,随机抽样一致性算法由于选取内点最多的平面,从而剔除较多的干扰点影响,所以拟合平面参数精度最高。
