基于无人驾驶单流传动的中型履带车辆大坡道起步控制
2020-09-28张瑞增龚建伟陈慧岩王博洋刘海鸥
张瑞增,龚建伟,陈慧岩,王博洋,刘海鸥
(北京理工大学 机械与车辆学院,北京 100081)
0 引言
履带车辆多工作于越野环境,工作环境较于普通轮式车辆更加复杂。国家军用标准规定,履带式多用途工程车纵向爬坡度应不小于46%(24.2°)[1]。由于履带车辆一般自重较大,且工作环境特殊,履带车辆坡道起步性能一直都是履带车辆定型试验的重要考核项目,对于车辆的使用性能也有着重要影响。由于履带车辆传动系统结构较普通轮式车辆有较大的区别,因此起步方式也有比较大的差异。
大坡道起步是有人车辆驾驶过程中最困难也是最危险的内容之一,要求驾驶员对制动器、离合器和油门等机构进行协调控制[2]。有人驾驶车辆可以依据驾驶员感知和驾驶者的驾驶经验获得较好的起步效果,而无人驾驶履带车辆的坡道起步对于车辆的起步过程自动控制提出了更高的要求。履带车辆的起步方式主要有主离合器起步和操纵杆起步两种,在运动阻力较大的地段上,要求使用行星转向机或转向离合器起步(即操纵杆起步)[3]。文献[4]提出了根据离合器接合过程中发动机转速下降程度来确定驻车制动释放时机的方法,具有很强的实用性。文献[5]基于实验数据库,建立了基于离合器结合速度的起步过程分段控制模型。文献[4-5]分别针对主离合器起步的驻车制动释放时机和主离合器的接合过程进行了研究,但是其主要针对有人驾驶过程的坡道起步,发动机通过驾驶员根据道路情况和车辆反馈进行控制,无法满足无人驾驶履带车辆自动起步的要求。文献[6]基于轻型无人驾驶履带车辆的坡道起步控制进行了研究,建立模糊控制策略,但是其采用主离合器起步的控制方式控制双侧转向离合器,没有考虑两侧操纵杆的协同问题。文献[7-8]分别针对履带车辆起步过程中离合器摩擦力矩和起步加速过程进行了分析。目前,国内外针对车辆坡道起步的研究主要是围绕起步阻力估计[9-11]和控制策略(PID控制[4-6]、最优控制[12-13]、Bang-Bang控制[14]等)进行的。
单流传动履带车辆具有价格低廉、传动效率高、结构简单的优势,但是其特殊的机械结构决定其运动控制不同于普通道路车辆。本文为提高无人驾驶履带车辆的适用性,针对二级行星转向机的履带车辆特点,结合驾驶员经验,提出了一种无人驾驶大坡道起步控制策略。
1 试验平台起步过程分析
本文试验所研究的无人驾驶履带车为履带工程车辆,是由某型单流传动中型履带车辆改造而成。车辆在原车动力传动系统的基础上进行了发动机电控化改造、自动变速改造、转向伺服控制系统改造(图1中虚线部分)以及上装作业装置改造。
如图1所示,转向伺服控制系统的液压泵安装于传动箱取力口,转向伺服液压缸通过连杆和转向机操纵机构联动,对二级行星转向机进行控制。根据不同的道路情况,可选择车辆的主离合器或二级行星转向机用于车辆的起步控制。
相比于主离合器起步,在操纵杆起步过程中,二级行星转向机处于加力状态,车辆传动比增加;且发动机带动的主动部分的转动惯量更大,有利于减小起步过程中发动机转速的下降。整车负载经由两侧转向机先后施加于发动机,减少了发动机由于瞬时负载过大导致熄火情况的出现。因此,操纵杆起步更能够适应车辆大坡道起步的需求,避免了主离合器的磨损。
1.1 人工驾驶操纵杆坡道起步过程
单流传动系统简图如图2所示,变速箱B两侧虚线框内分别为左侧和右侧二级行星转向机。

图2 单流传动系统简图Fig.2 Schematic diagram of a single circulating dynamic system
在人工操纵杆坡道起步过程中,初始时两侧操纵杆均处于第二位置(制动状态,操纵杆位置100%),两侧停车制动器TL、TR抱死,转向制动器ZL、ZR与闭锁离合器LL、LR分离,此时太阳轮自由转动,车辆静止于坡道上。当车辆开始起步时,驾驶员挂挡并确定油门控制量,将一侧操纵杆(以左侧为例)推到第一位置(定传动比加力状态)。这个过程中,机械操纵装置先后控制停车制动器TL松开,转向制动器ZL接合,主动轮获得牵引力。当一侧履带有动力传递时,快速将另一侧操纵杆推到第一位置,此时车辆两侧履带均有动力传输。而后驾驶员根据车辆实际状态分别将两侧操纵杆推到原始位置(操纵杆位置0%),此时两侧闭锁离合器LL、LR接合,行星转向机以传动比为1输出动力,车辆起步成功。
根据坡道大小和车辆状态合理判断两侧操纵杆动作的时机是试验车辆协调起步的重点之一。
1.2 电子调速柴油发动机特性分析
原有的12150L柴油机为机械式操控,无法满足无人驾驶的要求,故需要进行发动机调速系统电控化改造,发动机电子调速控制系统如图3所示。将机械离心式全程调速器替换为电子调速器,发动机控制器根据发动机期望转速指令,依据反馈信息,改变柴油机的供油量,实现发动机转速稳定控制。

图3 发动机电子调速控制系统Fig.3 Electronic speed control system of engine
施加于发动机的动载荷对车辆起步性能有很大的影响[15]。在坡道起步之前,发动机处于空载或者低负载状态,以部分负荷特性运转,供油量较小,输出功率低。在高负荷的起步条件下,发动机负载快速增加。为了避免发动机熄火,一方面需要发动机电子调速控制系统依据发动机转速变化,迅速增加供油量;另一方面需要合理控制操纵杆接合速度,避免对发动机冲击过大。同时,坡道起步时发动机初始转速也对车辆起步成功率有很大的影响。表1为发动机和车辆动力参数。
2 大坡道起步控制策略的制定方法
由于试验车辆为越野路面上行驶的无人驾驶履带工程车,所以在制定车辆起步策略时将起步成功率和零部件使用寿命作为首要考虑因素。以下为主要考虑因素:
1)需要保证在不同坡道上车辆起步的成功率;
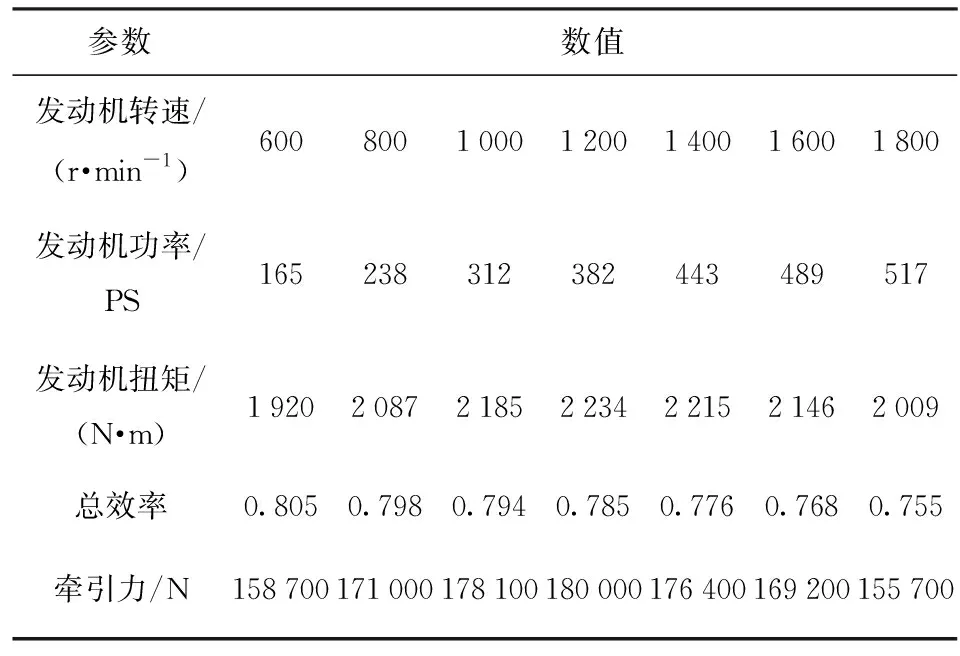
表1 发动机和车辆动力参数Tab.1 Engine and vehicle power parameters
2)避免过大的冲击,延长零部件使用寿命,两侧制动带均匀磨损;
3)尽量避免“倒溜”和起步跑偏等问题出现;
4)如果车辆起步失败,应迅速采取制动措施,避免发动机憋熄火乃至倒爆现象的发生。
2.1 大坡道起步控制流程
通过对驾驶员控制车辆坡道起步的流程分析,制定了坡道起步控制软件流程图,如图4所示,车辆开始处于坡道驻车状态。
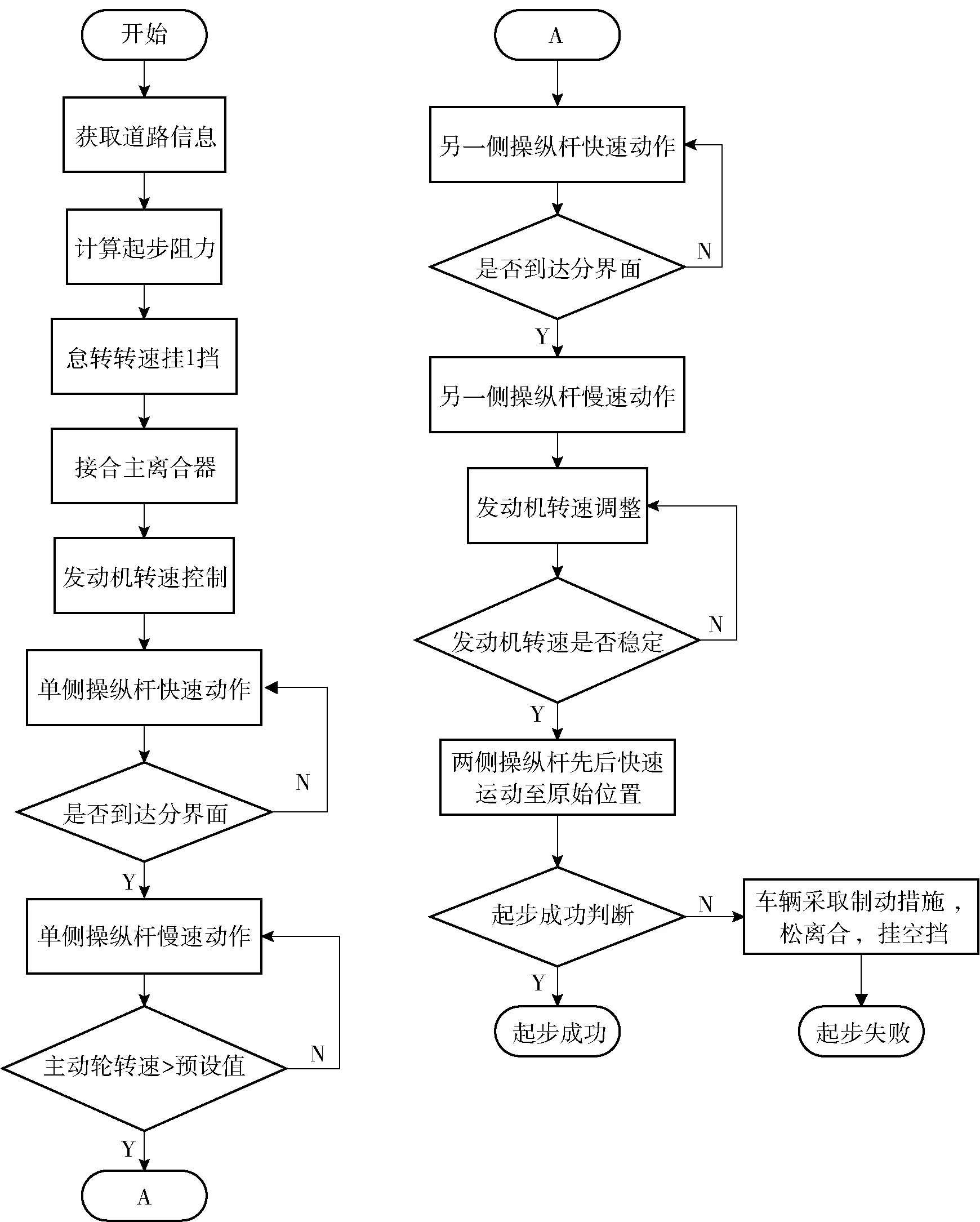
图4 车辆起步控制流程图Fig.4 Flow chart of vehicle starting
启动发动机之后,车载系统自动获取车辆位置,当前道路性质与坡道角度等信息,根据(1)式进行车辆起步阻力的估算。然后挂1挡,接合主离合器。根据坡道阻力进行发动机转速的控制,确保起步时发动机负载快速增加的过程中发动机不熄火。在发动机达到适合起步的转速时,控制一侧操纵杆以快速运动至第一位置,待达到预设条件后,控制另一侧操纵杆运动至第一位置,进行车辆转速的调整,待车辆发动机转速稳定后两侧操纵杆先后恢复原始位置。
如果车辆起步过程中任一时刻发动机熄火或者发动机转速低于最低稳定转速则认为车辆起步失败,车辆采取制动措施,松离合器,挂空挡。在操纵杆接合过程中还需要根据起步状态实时调整发动机控制参数,避免由于起步负荷过大导致发动机憋熄火。
2.2 道路环境信息的获取与计算
试验采用了实验室采集制作的具有路面性质的电子地图[16],基于车辆实时卫星定位信息进行路网匹配和解算,直接获取道路类型、阻力系数和附着系数等信息。
如图5所示,道路环境信息通过环境信息接收模块、处理模块和发送模块3个层面实现。

图5 道路信息获取概况Fig.5 Road information acquisition
定位信息通过车载差分GPS获取,定位精度小于0.2 m,惯性导航航向角、俯仰角和侧倾角等通过惯性导航系统获取。工控机根据GPS定位信息进行路网的匹配与解算,获得当前的车辆位置、道路性质信息,查表获取当前道路的阻力系数、附着系数并且计算当前道路的起步阻力,图6为电子地图软件实现流程。

图6 电子地图软件实现流程Fig.6 Implementation process of electronic map software
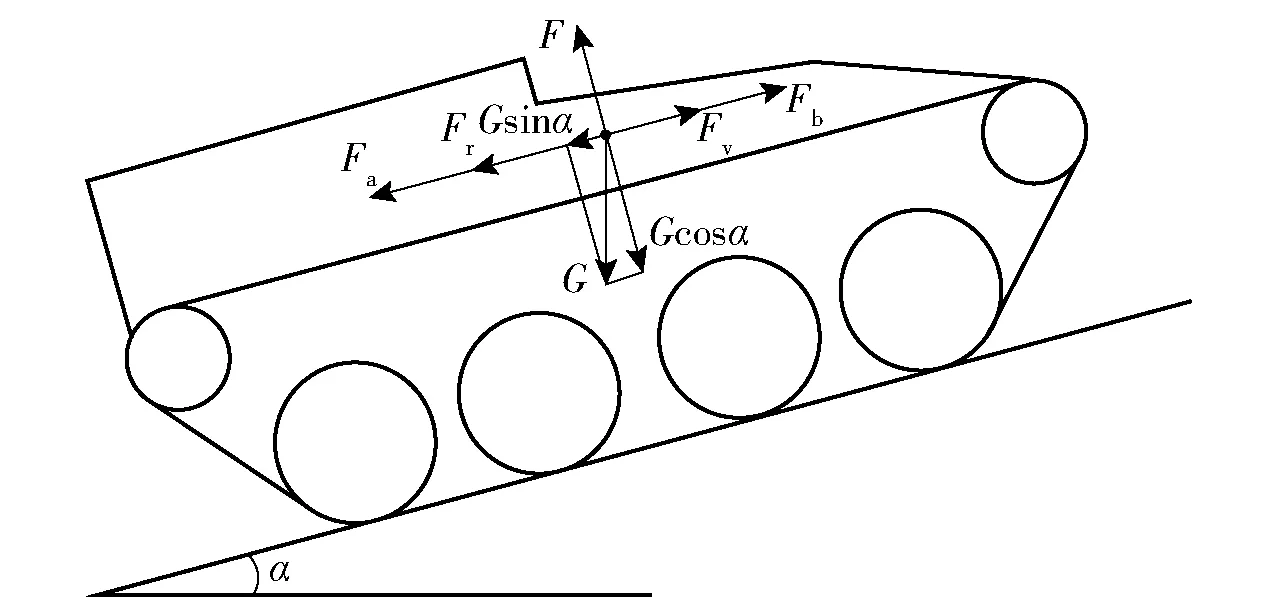
图7 履带车纵向坡道受力简图Fig.7 Force of tracked vehicle on longitudinal ramp
图7为履带车纵向坡道受力简图,将车辆受力转换到质心。图7中:F为地面支持力的合力;Fv为履带车驱动力;Fb为坡道起步开始之前受到的制动力;Fa为起步开始后受到的加速阻力;G为重力;Fr为履带车行驶时的地面阻力,且Fr=fGcosα,f为履带车行驶时的运动阻力系数,α为坡度。如要满足车辆顺利起步的条件,应当有
(1)
式中:φ为地面附着力系数。即:该车起步阻力应当小于或等于该车的最大许用起步阻力Fp,且总驱动力小于地面能够提供的最大附着力。
3 起步操纵杆位置聚类分析与协调控制
3.1 操纵杆位置聚类分析
由于二级行星转向机的特性,以及不可避免的操纵机构磨损,转向机第一位置不仅仅是一个确定的点,而是在一定区间内都有其作用范围。为了避免车辆“倒溜”,减少起步冲击,需要控制操纵杆在非敏感区间内快速移动,而在敏感区间内以较慢速度移动。在机械上很难直接获得敏感区间与非敏感区间的分界面,且缺乏划分依据。在工程应用中大多采用基于经验的划分方式。
本文使用高斯混合模型(GMM)对车辆左、右两侧操纵杆位置进行聚类分析,通过统计的方法对操纵杆工作区间进行概率的描述,表征车辆操纵杆的功能范围,划分操纵杆敏感与非敏感区间。
多变量GMM如(2)式所示。
(2)

(3)
式中:G(x)为变量x的高斯分布;g(x,μi,εi)为概率密度函数;k为高斯分量的数目;pi为各高斯分量的先验概率值;μi为各高斯分量的中心点矩阵;εi为各高斯分量的协方差矩阵;d为变量x的数据维度。
本文利用车辆所搭载的同步数据采集系统对车辆转向过程中左、右操纵杆位置信息和车辆轮速信息进行采集,建立相应的数据库。去除车辆直行和原地转向数据,然后利用极大似然估计结合期望最大化(EM)算法,可求得表征操纵杆全区间概率密度分布的GMM参数。限于篇幅问题,本文只针对起步过程左侧操纵杆的聚类结果进行讨论,并设定控制分界面。
车辆左侧操纵杆的GMM如图8所示,其中μ、σ分别为均值与方差,纵坐标表示概率密度值,横坐标表示操纵杆动作区间。每个区间代表操纵杆的一类动作,Ⅰ区间对应操纵杆第一位置和原始位置之间的切换,Ⅱ区间为第一位置,Ⅲ区间对应操纵杆第一位置和第二位置之间的切换。模型的概率区间体现了操纵杆的作用范围。
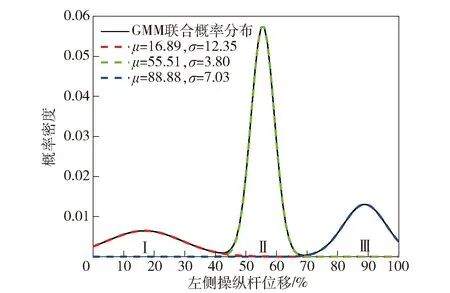
图8 左侧操纵杆高斯混合模型Fig.8 Gauss mixture model of left joystick
以高斯分布中置信度为95.4%的区间分界作为操纵杆第一位置敏感区域和非敏感区域的划分依据。在实际应用中,根据已经离线训练得到的操纵杆GMM聚类模型,以及依据聚类模型得到的分界面判定逻辑,输出控制切换面。
(4)
式中:u(t)为操纵杆执行器的输出速度,s为操纵杆实际位置,当u(t)=vmax时,对应操纵杆执行器的最大输出速度vmax;N为控制切换面,当实际位置在分界面内时,则转入区间内模糊PI控制逻辑。
3.2 操纵杆协调起步过程受力分析
由于两侧操纵杆先后动作,若两侧操纵杆动作时间间隔过小,一侧驱动力较小,而另一侧又过早失去制动力,会导致车辆严重“倒溜”。当两侧操纵杆动作时间间隔过长时,会导致车辆起步不协调,航向侧偏,甚至车辆转向阻力过大而熄火。

(5)
(6)


图9 坡道原地转向过程受力分析Fig.9 Force analysis of slope turning

(7)
(8)

4 起步过程的发动机控制策略
发动机控制是车辆坡道起步的关键之一,合理的发动机初始转速设置能够提高车辆起步成功率。为了便于对发动机进行分析,将两侧转向机看作一个离合器。如图10所示:曲线nD1和nD2分别为不同初始转速下离合器主动部分的转速,且曲线nD2的初始转速大于nD1的初始转速;曲线nP1和nP2分别为不同负载下被动部分的转速,且曲线nP2对应的负载大于nP1对应的负载;nmin为发动机最小稳定转速对应的离合器主动部分转速,当主动部分在转速nD1时开始接合离合器,车辆负载为曲线nP1对应的负载时,主动、从动部分在n2处同步,n2>nmin,车辆起步成功;而当车辆负载为曲线nP2对应的负载时,主动、从动部分在n1处同步,n1

图10 起步过程离合器转速变化Fig.10 Speed change of clutch during starting
根据实际测试数据,确定操纵杆起步过程中发动机初始转速的设定值,如表2所示。

表2 不同负载下发动机初始转速期望值Tab.2 Expected values of initial engine speed underdifferent loads
改装后发动机电控系统现有的双层PID控制参数设置更多地考虑正常驾驶工况下发动机控制的稳定性,响应性较差。在车辆起步过程中,发动机负载变化大,容易熄火。由于现有的发动机电控系统PID参数无法在线修改,试验中通过模糊控制下发期望转速的变化量,以期获得更快的发动机响应。
5 实车验证分析
结合试验车辆的硬件条件和图4中的软件控制流程,编写了试验控制程序。控制策略经试验车辆分别在硬质土路面的15.5°、17.0°、19.0°、20.0°坡道上进行了多次试验,试验均取得成功。为了对自动控制软件的控制水平进行衡量,在相近工况环境下,引入驾驶员人工驾驶车辆的数据进行对比。
试验中采集的人工驾驶起步和自动驾驶起步的一组数据如图11~图14所示,航向角、俯仰角数据由惯性导航系统采集,冲击度由计算获取。表3为试验平台部分系统结构参数。

图11 人工驾驶17.0°(31%)坡道实车起步数据Fig.11 Starting data of real car on a ramp with slope of 17.0°(31%) during manual driving

图12 自动驾驶15.5°(28%)坡道实车起步数据Fig.12 Starting data of real car on a ramp with slope of 15.5° (28%) during automatic driving
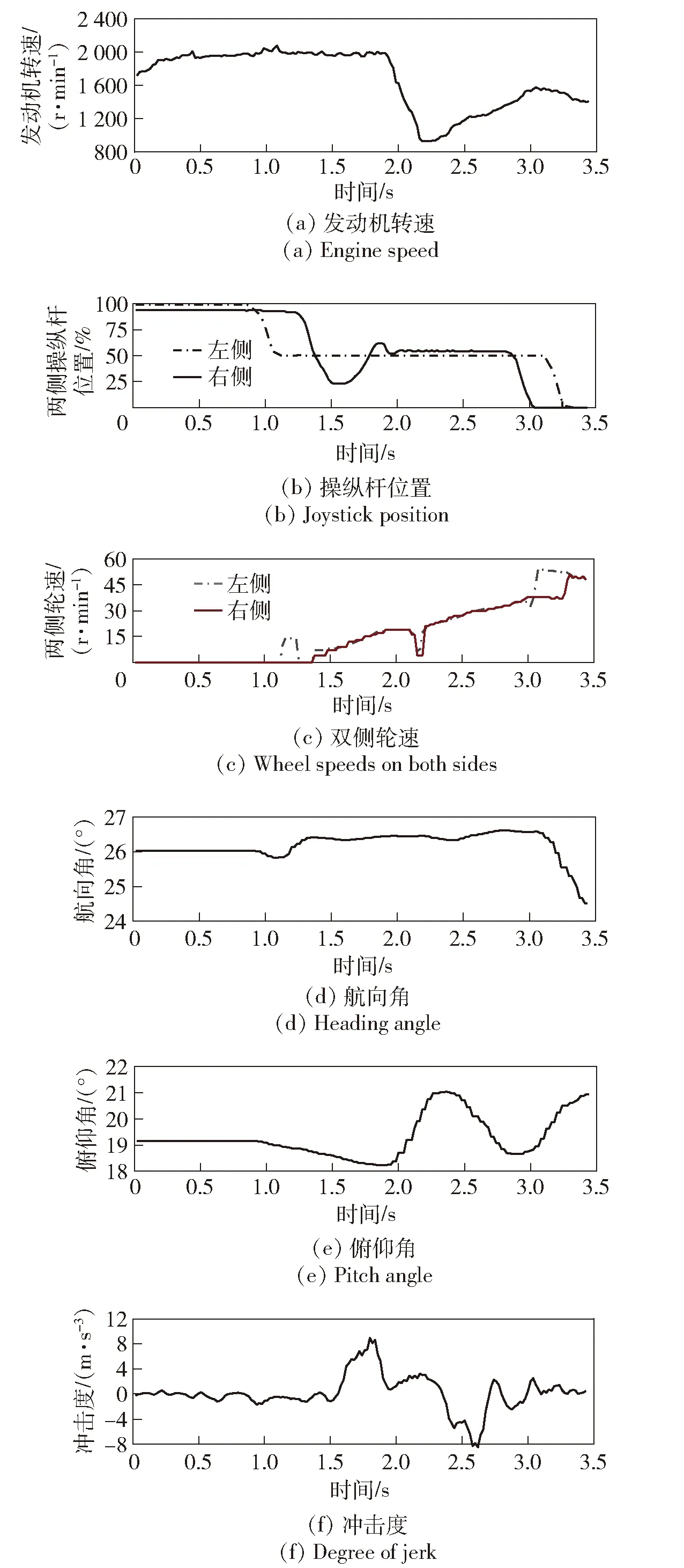
图13 人工驾驶19.0°(34%)坡道实车起步数据Fig.13 Starting data of real car on a ramp with slope of 19.0°(34%) during manual driving
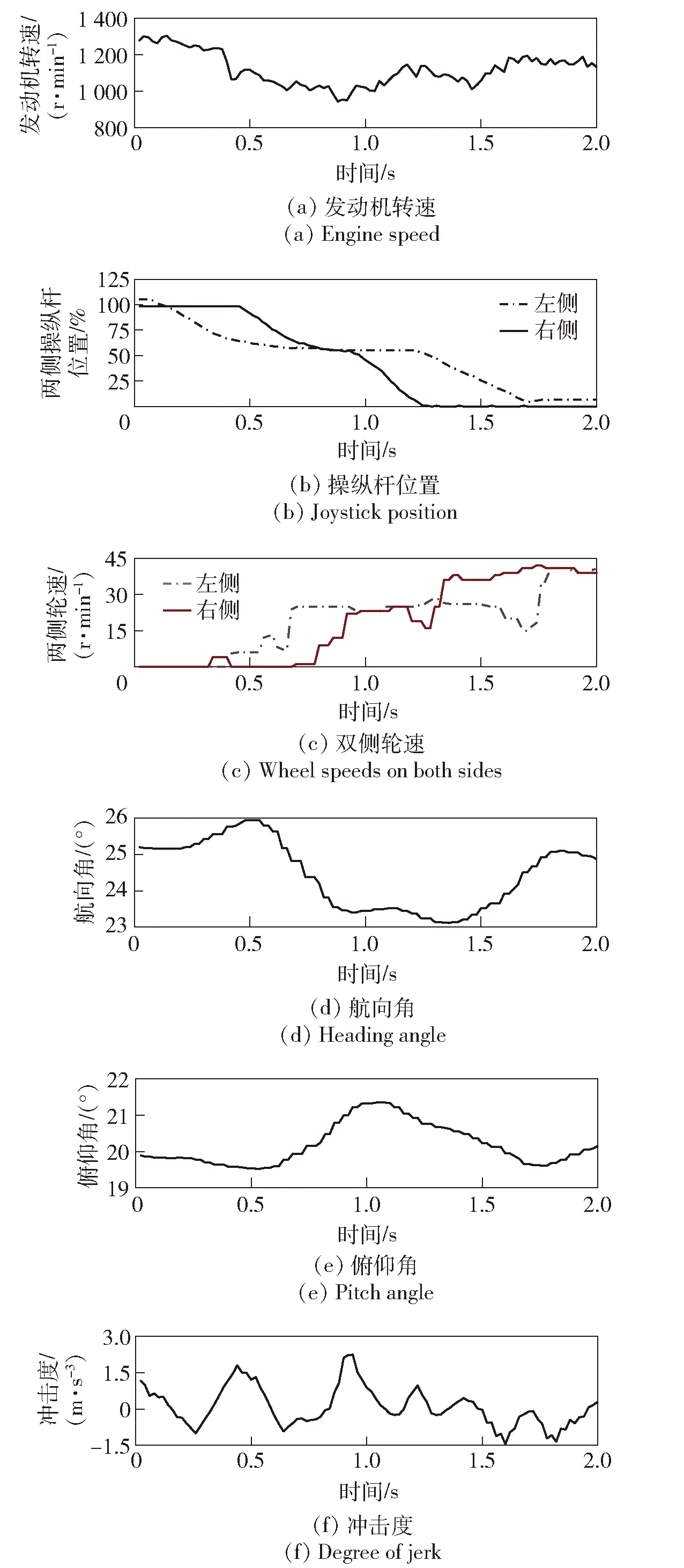
图14 自动驾驶20.0°(36%)坡道实车起步数据Fig.14 Starting data of real car on a ramp with slope of 20.0°(36%)during automatic driving
由图11~图14数据对比发现,自动驾驶起步过程较人工驾驶起步过程耗时短,且运用了发动机模糊控制策略和操纵杆协调控制策略,转速控制更加平稳。由于原车助力机构的设置,人工驾驶操纵杆接合速度为先慢、后快,导致转向制动带快速抱死,起步过程发动机转速下降较多。人工驾驶在大坡道上起步时间较长主要是由于起步过程中发动机转速下降过多,驾驶员在加力挡维持了较长时间等待转速恢复导致的。由于起步方式的特殊性,自动驾驶起步与人工驾驶起步过程中车辆均出现了不同程度的航向偏差。特别是自动驾驶起步过程中,由于操纵杆动作最大速度的限制,出现了较大的航向角波动。两侧操纵杆的交替动作补偿了航向的偏差,最终航向偏差1°左右,对于起步过程低速的驾驶影响不大,能够满足坡道起步的要求。
同时,本文还针对上述坡道各进行了多次起步试验,均取得成功,具体试验结果见表4. 由于两侧操纵杆先后动作,车辆两侧“倒溜”的程度并不一致,这里“倒溜”距离通过霍尔式转速传感器反馈的双侧转速数据计算后取两侧平均值得到。人工驾驶起步耗时和航向偏差变化较大,而自动驾驶起步表现更加稳定。
在硬质土路面17°坡道人工驾驶起步时,在操纵杆动作较长时间后两侧轮速才开始响应,是由于转向机出现打滑、驾驶员操纵不到位导致的。
通过上述试验可以看出,在试验坡道中,自动驾
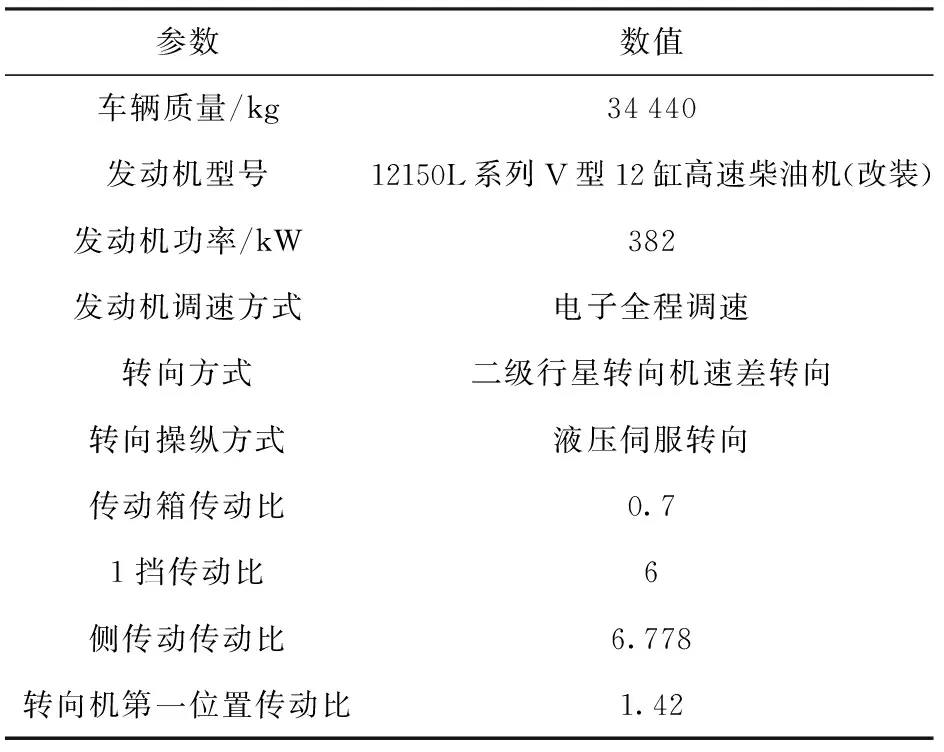
表3 试验平台结构参数表Tab.3 Structural parameters of test platform

表4 试验结果统计表Tab.4 Statistical table of test results
驶起步过程相比于人工驾驶起步过程在发动机转速控制、车辆“倒溜”控制、起步时间和冲击度的控制中有更好的表现。由于试验场地的限制,同一测试坡道上坡度有起伏,也没能进行更大角度坡道的试验,但是目前的试验能够证明本方法对较大坡道有较好的效果。
6 结论
1)对人工驾驶过程进行分析,确定操纵杆起步的关键在于操纵杆动作速度和时机与发动机稳定性控制,并且根据驾驶员操作规范制定了车辆坡道自动起步过程的控制策略。
2)对起步过程中操纵杆动作进行GMM聚类分析,确定操纵杆第一位置敏感区域和非敏感区域的分界面,并且对不同区域进行针对性控制。
3)对发动机电调系统的特性进行了分析,讨论了发动机起步过程熄火的关键因素,制定了坡道起步过程的发动机控制策略。
4)根据车辆自动起步策略和发动机控制策略编写了自动坡道起步控制软件,并且应用到无人驾驶车辆上,在多种坡道上进行了验证,相比于人工驾驶起步过程有较好的效果。