二维矢量水听器及其在Argo浮标平台上的应用技术
2020-09-28孙芹东王超张小川王文龙
孙芹东,王超,张小川,王文龙
(1.海军潜艇学院,山东 青岛 266199; 2.青岛海洋科学与技术试点国家实验室,山东 青岛 266237)
0 引言
同振式矢量水听器最早由美国学者Leslie等[1]于1956年提出,作为一种水声测量设备,由于其本身不产生明显的声场畸变,且具有体积小、指向性优异、灵敏度高、抗各向同性噪声干扰能力强等优点[2-4],测量水声信息有较高的准确性和可靠性,当前已被广泛应用于水声工程各领域。随着科学技术的不断进步,以及各学科交叉融合发展,声学传感器在Argo浮标、水下滑翔机等水下缓动平台集成应用,以用于执行海洋环境噪声观测及移动目标探测任务成为当前研究的热点[5-8]。
Argo浮标是一种依靠油囊改变自身净浮力、实现上浮下潜的剖面观测设备,具有长时序、低噪声、高效费比的优点,是海洋环境精细化观测、海洋战场环境保障、海洋环境噪声测量、海洋目标监测的重要有效手段,其经济效益和军事意义显著[9]。当前Argo浮标已经广泛应用于海洋水文环境观测领域,在集成声学传感器方面,2014年中国船舶重工集团有限公司第710研究所在深海型Argo剖面浮标平台底部集成声压传感器,研制了一型侦察定位浮标和记录浮标,初步认定了其工作原理和性能指标。海军潜艇学院依托中国船舶重工集团有限公司第710研究所Argo浮标技术基础,设计声学载荷,通过对浮标平台进行电磁兼容性与声学特性优化设计,研制了水下声学浮标样机,并开展了消声水池、浅海、深海海域目标探测性能验证试验。
本文针对水下声学浮标研制要求,设计一种小体积、高灵敏度、具备姿态测量功能的二维复合同振式矢量水听器,并对矢量水听器各通道灵敏度、指向性参数进行了标定。2018年,在南海某海域开展了水下声学浮标目标探测能力验证试验,为同振式矢量水听器在Argo浮标平台应用奠定了技术基础。
1 矢量水听器姿态测量传感器设计
1.1 矢量水听器姿态测量与校正原理
矢量水听器直接测量目标方位信息是相对于自身载体坐标系(b系)的目标方位,该载体坐标系原点位于矢量水听器几何中心处(几何中心和质心重合),xb、yb、zb坐标轴所在方向分别指向右、前、上方向。矢量水听器所测目标方位信息最终要转化到地理坐标系(n系)下,由于受海洋内波、洋流等复杂环境的影响,矢量水听器自身所在载体坐标系相对地理坐标系存在姿态变化,为求得载体坐标系相对地理坐标系旋转姿态角,对地理坐标系定义为:原点位于矢量水听器几何中心处,3个坐标轴xn、yn、zn分别指向东、北、天方向。
假设矢量水听器所在载体坐标系相对地理坐标系旋转所得姿态角为航向角α、俯仰角β、横滚角γ,那么载体坐标系Oxbybzb中某一点(xb,yb,zb)T通过姿态角可以转换到地理坐标系Oxnynzn下,其转换关系为
(1)

1.2 姿态传感器选取与测试
微机电系统(MEMS)姿态传感器采用了数字式三轴MEMS陀螺仪来测量矢量水听器的运动角速度、三轴MEMS加速度计来测量矢量水听器的运动加速度以及三轴MEMS磁力计来测量矢量水听器所在环境磁场强度(传感器参数见表1),采用基于ARM-Cortex内核的高性能单片机作为运算处理单元,用来实现姿态传感器的自主控制、数据采集及姿态解算功能。MEMS姿态传感器制作完成后,其姿态解算速率达540 Hz,解算输出的姿态欧拉角通过RS232串口总线传输至上位机[11]。MEMS姿态传感器尺寸为25 mm×25 mm×3 mm,功耗为0.25 W.
表1 传感器参数Tab.1 Sensor parameters
在国防科技工业第一计量测试研究中心开展了MEMS姿态传感器的性能参数测试工作[12],测试科目包括横滚角、航向角及俯仰角静态和动态精度测试。在动态精度测试时,由于矢量水听器用于水下Argo浮标平台,平台运动受海洋中洋流、内波、潮汐、浪涌等影响的频率主要集中在0.2 Hz以下的低频段,因此分别测试了3个轴向在不同频率下的动态精度,这里给出航向角动态测试结果(见表2)。由测试结果可知:MEMS姿态传感器在振幅小于20°、频率低于2.0 Hz时,航向角动态误差小于0.5°,动态相对误差为振幅的3.6%以内;横滚角的动态误差小于0.5°,动态相对误差为振幅的2.8%以内;俯仰角动态误差小于0.4°,动态相对误差为振幅的2.9%以内[13]。
表2 航向角动态精度测试结果Tab.2 Test results of dynamic accuracy of heading angle
2 矢量水听器设计与制作
矢量水听器同时包含一个声压通道和两个相互正交的矢量通道,可以同步共点测量声场空间中的声压和质点振速,具有灵敏度高、指向性好、分辨率高等优点,是目前工程应用中普遍采用的一种设计结构,在Argo浮标平台上集成单个矢量水听器即可实现水中目标的全空间无模糊测向,降低了平台的搭载负担和集成复杂度。
2.1 声压通道设计
矢量水听器声压通道敏感元件为压电陶瓷圆管,圆管沿径向极化。该类型敏感元件具有相对较高的灵敏度,且指向性沿半径方向均匀分布,其实测参数如表3所示。
表3 压电陶瓷元件实测参数Tab.3 Measured parameters of piezoelectricceramic element
实际制作时,采用环氧树脂和玻璃微珠按一定比例混合的复合泡沫材料填充于压电陶瓷圆管内部,聚氨酯密封材料包裹在陶瓷圆管外部。使用时,可假设压电陶瓷圆管内表面和端部不受力,外部声场压力p均匀作用于外表面,声压通道开路电压接收灵敏度级Mp[14]为
(2)
式中:V为声压通道开路电压;i=ri/ro,i为压电陶瓷圆管内外半径之比。将表3中声压通道敏感元件参数代入(2)式中,可得到声压通道开路电压接收灵敏度级随材料参数变化曲线,如图1所示。
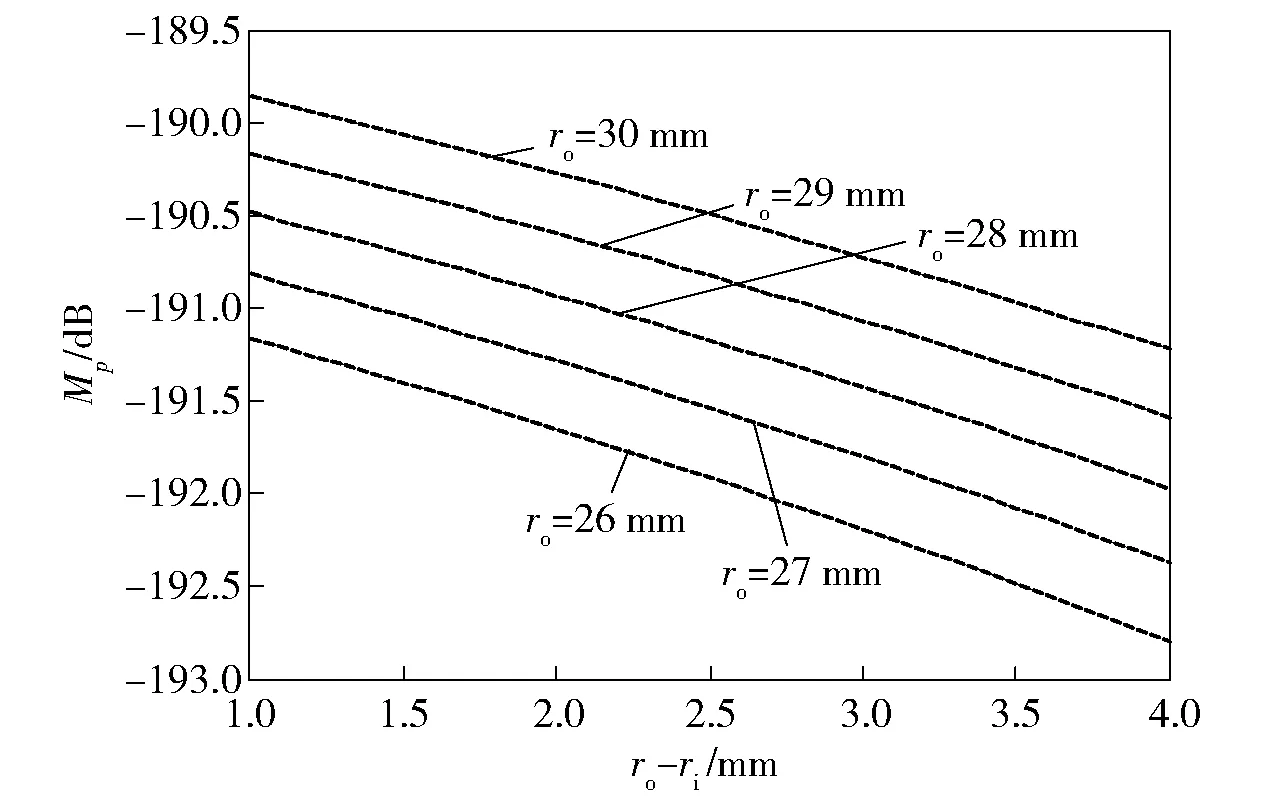
图1 声压通道灵敏度级特性曲线Fig.1 Sensitivity curves of sound pressure channel
由图1可知,根据压电陶瓷详细参数可以计算得出矢量水听器声压通道灵敏度级Mp=-191.7 dB(0 dB参考值为1 V/μPa),且陶瓷元件灵敏度随着管壁厚度的增大而减小、随着外半径的增大而增大[14]。
2.2 矢量通道设计
由矢量水听器设计理论基础可知,如果满足声学刚性、圆柱形声接收器的最大线性尺寸远小于入射声波波长,且圆柱形声接收器平均密度与水介质密度近似相等,则有以下(3)式[15]成立:
(3)

由(3)式可知,如果满足声学刚性、圆柱形声接收器平均密度与水介质密度近似相等,则在水中声波作用下,其振动速度与其等效声中心所在处水质点振速值幅值相等、相位一致。因此,在圆柱形声接收器内部放置质点振速传感器,且保证制作完成后尺寸、密度满足上述条件,即可制作同振式矢量水听器。
2.3 矢量水听器整体结构设计与制作
本文为Argo浮标平台设计的矢量水听器在结构上包含声压通道、两个正交的矢量通道,为实时感知矢量水听器姿态信息在其内部封装姿态传感器,为保证姿态传感器测量矢量水听器姿态信息的准确性,二者用装配支架固定,其结构剖面如图2所示。
图2 矢量水听器剖面图Fig.2 Section of vector hydrophone
如图2所示,制作完成后二维加速度计和压电陶瓷敏感元件分别构成矢量水听器矢量通道和声压通道,姿态传感器用来拾取矢量水听器相对地理坐标系的姿态信息,聚氨酯密封材料起到透声和水密作用,复合材料为环氧树脂和玻璃微珠混合而成、调节整体密度的低密度复合泡沫材料。在使用时,用弹性元件将矢量水听器通过悬挂孔悬置在刚性框架上,随声波作等幅、同相振动。
2.4 矢量水听器参数测试
矢量水听器参数测试工作在国防科技工业水声一级计量站完成,测试参数包括各通道灵敏度和指向性。灵敏度测试在驻波管中进行,通过在驻波管中形成低频平面波,采用比较法进行校准[15],其测试结果如图3所示。
图3 矢量水听器灵敏度级测试曲线Fig.3 Sensitivity curves of vector hydrophone
从灵敏度级测试结果可知:声压通道灵敏度级为-191.5 dB±0.5 dB,在频带范围内基本为平坦曲线,测试结果较为理想;矢量通道声压灵敏度级在1 kHz频点处为-179.5 dB(0 dB参考值为1 V/μPa),且随着频率增加灵敏度逐渐增大,每倍频程灵敏度值增加约6 dB,x、y两个矢量通道灵敏度值一致性好,能够满足工程应用。
在驻波管中,通过选定测试频率,在发射器发射功率保持不变情况下,通过控制回转装置从被测矢量水听器轴向对准发射换能器开始,旋转一周,并同时记录被测通道在不同角度时开路输出电压值,通过归一化处理得到指向性图,这里给出800 Hz频点处各通道指向性测试结果(见图4)。
图4 在800 Hz频点处矢量水听器指向性Fig.4 Directivity pattern of vector hydrophone at 800 Hz
由矢量水听器在800 Hz频点处各通道的指向性测试结果可知:声压通道无指向性,最大值不均匀性为0.2 dB;矢量通道均具有“8”字形指向性,主轴最大灵敏度值与主轴垂直方向最小灵敏度值之差均不小于36.1 dB,主轴最大值不均匀性不大于1.9 dB.
3 海上试验数据分析
本文研制的二维矢量水听器经过了高静水压力试验、消声水池等效噪声压级测量试验,声学探测系统消声水池、浅海目标探测能力验证试验等。2018年,在南海某海域应用集成矢量水听器的Argo浮标(以下称水下声学浮标)开展目标探测试验,主要检验水下声学浮标定深漂流模式下姿态传感器对矢量水听器姿态感知与校正能力、矢量水听器目标探测能力。试验海区水深约1 550 m,海底平坦为泥沙底质,试验期间水下声学浮标采用定深漂流方式搜索目标,为避免浮力调节单元工作时噪声对目标测向的影响,设置水下声学浮标定漂深度为200 m,容差±50 m,即水下声学浮标深度在150~250 m区间深度时浮力调节单元不工作,试验期间试验船作为目标配合试验。
图5给出了试验期间水下声学浮标矢量水听器测试的海洋环境噪声谱级,由测试结果可以看出,试验期间海洋环境噪声谱级约为60.0 dB@1 kHz.
水下声学浮标06:59时刻布放入水,14:19时刻上浮至水面,图6(a)给出了09:06~14:01时间段水下声学浮标定深漂流工作模式下,其深度随时间变化曲线,在整个定深漂流工作阶段深度稳定在150~185 m区间范围。设定水下声学浮标声学系统09:06时刻上电启动开始工作,此时深度150 m,水下声学浮标由水面下潜到150 m用时127 min;声学系统14:01时刻断电停止工作,此时水下声学浮标深度187 m,之后便排油上浮;14:19时刻上浮至水面,上浮用时18 min,声学系统连续工作296 min. 试验船作为配合目标,09:32时刻开始以10 kn航速、340°航向航行,10:55时刻停止,图6(b)给出了09:32~10:55时间段矢量水听器姿态角随时间变化曲线。由图6(b)可以看出:横滚角基本保持在-180°,俯仰角基本保持在0°,航向角在0°~360°缓慢变化,由于矢量水听器悬挂装置与水下声学浮标平台采用刚性连接,说明水下声学浮标在定深漂流模式下能够保持水平状态,但由于受到海流的影响,在定深随流漂的过程中自身在缓慢旋转。图6(c)给出了09:32~10:55时间水下声学浮标与配合试验船态势信息(MMSI表示水上移动通信业务标识码),水下声学浮标06:59时刻入水、14:19时刻出水,在该时间段内,水下声学浮标沿351°方向漂离布放位置点8 km,水下声学浮标定漂速度约为0.6 kn.
图5 海洋环境噪声谱级Fig.5 Noise spectrum levels in marine environment
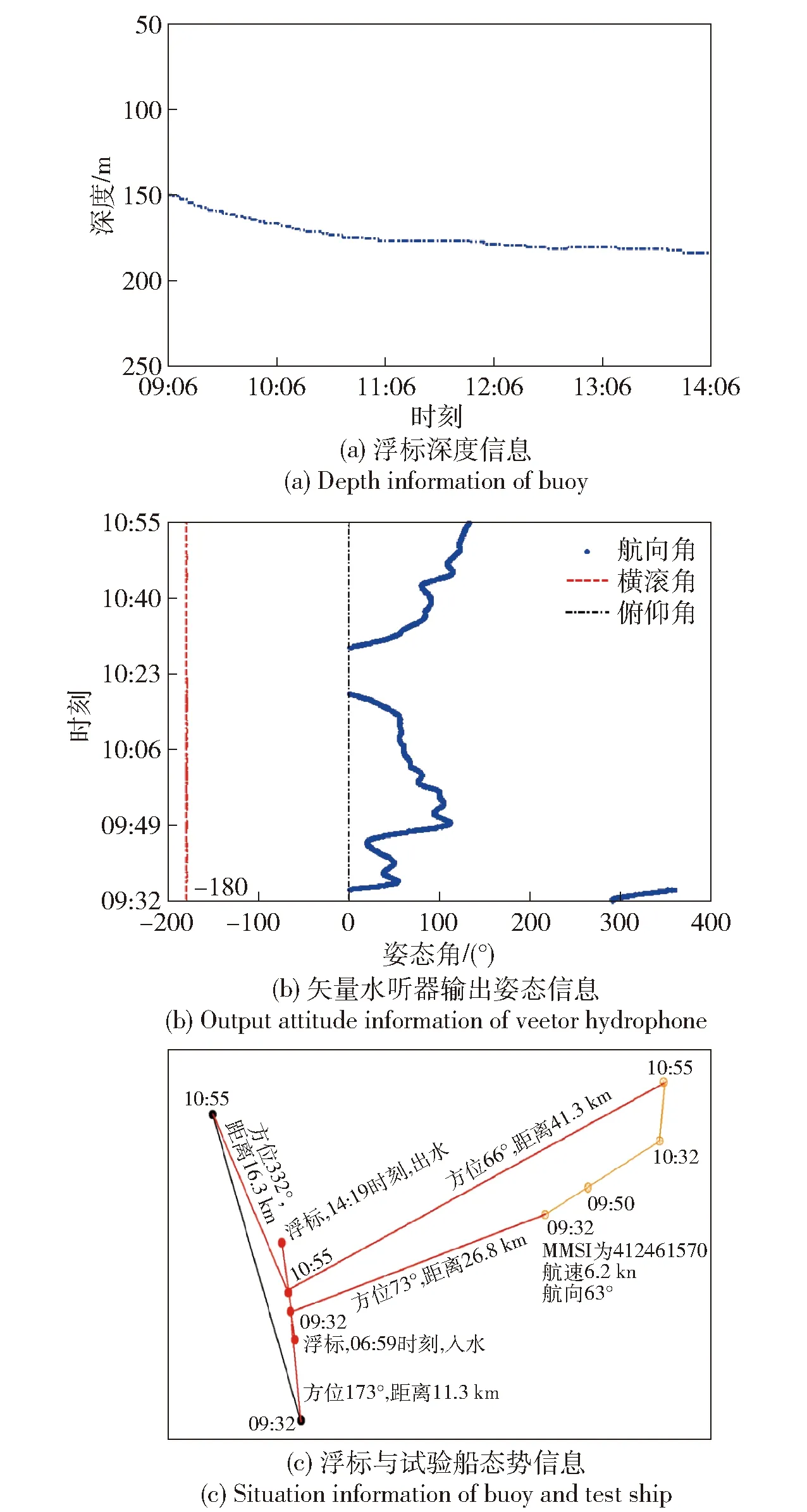
图6 浮标深度、矢量水听器姿态及浮标与 试验船态势信息Fig.6 Buoy depth, vector hydrophone attitude, and buoy and test ship situation information
图7(a)给出了09:32~10:55时间段,水下声学浮标矢量水听器姿态校正前解算试验船方位与经全球导航定位系统(GPS)推算方位信息;图7(b)给出了该时间段,水下声学浮标矢量水听器姿态校正后解算试验船方位与经GPS推算方位信息;图7(c)给出了该时间段,水下声学浮标与试验船经GPS推算距离信息。
由试验结果可以看出:1)姿态校正前,水下声学浮标矢量水听器解算输出的噪声信号估计方位为相对矢量水听器自身载体坐标系的方位,同GPS推算试验船方位偏差较大。2)姿态校正后,水下声学浮标矢量水听器解算输出的噪声信号估计方位为相对地理坐标系的方位,基本同GPS推算试验船方位相吻合。3)试验期间,水下声学浮标矢量水听器主要接收试验船辐射噪声信号,解算方位主要为试验船目标,但试验期间船舶自动识别系统显示附近有工程船作业,如图6(c)所示,工程船MMSI为412 461 570,此工程船09:32时刻以航速6.2 kn、航向63°航行,方位为水下声学浮标73°方向、距离26.8 km;此工程船10:32时刻转向,10:55时刻,方位为水下声学浮标66°方向、距离41.3 km. 所得工程船目标方位信息,与图7(b)吻合较好。4)受工程船噪声干扰,以及水下声学浮标推算位置存在偏差,因此试验船目标解算方位与GPS推算方位间存在一定偏差,此时间段内试验船距离水下声学浮标最远达14.4 km.
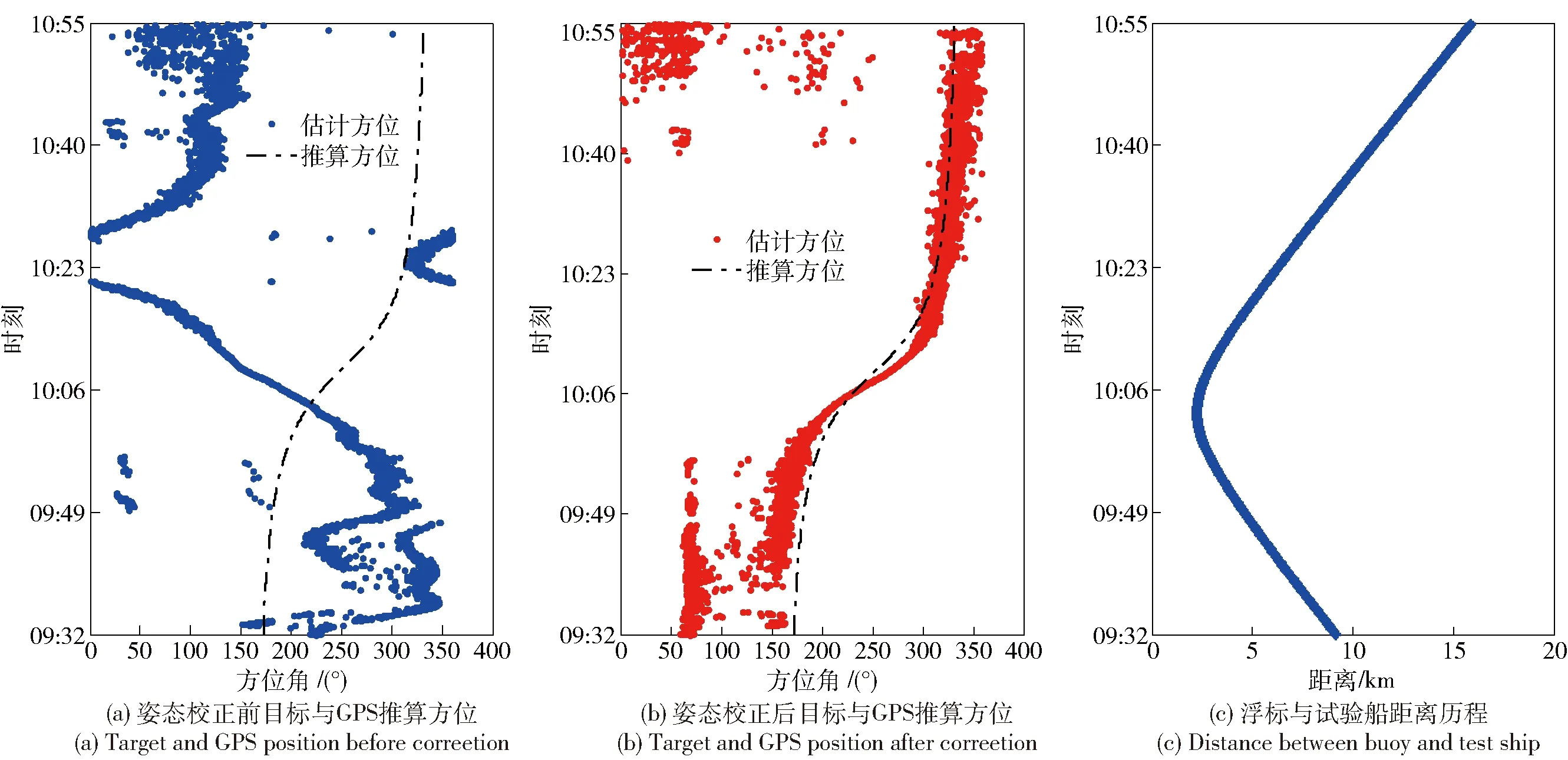
图7 水下声学浮标系统目标探测试验结果Fig.7 Target detection test results of underwater acoustic buoy system
4 结论
为解决矢量水听器在Argo浮标平台应用时其姿态变化难以准确测量导致目标测向精度低的难题,本文设计、制作了基于MEMS姿态传感器的矢量水听器样机,并应用集成矢量水听器的Argo浮标开展目标探测性能海上试验。MEMS姿态传感器测试结果表明,其精度能满足矢量水听器测量需求,矢量水听器各通道指向性、灵敏度性能参数符合设计要求。海上试验结果表明,矢量水听器在Argo浮标平台使用经姿态校正后,目标方位估计值和GPS信息推算值吻合较好,深海良好水文条件下对航速10 kn的试验船目标最远探测距离大于14.4 km. 本研究对矢量水听器在Argo浮标平台上的工程应用具有重要的参考意义。
