异步电机软起动与谐波抑制一体化控制
2020-09-10吴伟东
童 军,吴伟东,王 悦,石 磊
(西安科技大学 电气与控制工程学院,西安 710054)
0 引 言
随着全国每年1/3的发电量均提供给异步电机,这一数据表明异步电机作为一个能量转换装置,受到了格外的重视[1]。目前异步电机存在的主要问题是起动冲击电流大,起动导致大约5-8倍的大电流,有的甚至更高[2]。随着科技的进步,衍生出很多新型软起动设备[3]。对于一些低压小容量电机,起动产生的电流冲击影响可以忽略不计。对于大容量的异步电动机,直接起动的大电流,不仅造成电机损耗严重,还会影响电机使用期限。因此大容量异步电机必须采用软起动装置,以减少起动冲击电流对电机本身及电网的损害。与电机直接起动相比较,软起动器起动可以避免起动冲击电流过大的缺点,使电机可以平滑起动。而且软起动器具有体积小,结构简单,价格低廉的优点[4]。
目前,国内外研究的软起动器主要是提高电动
机的起动性能,并未考虑软起动器在工作过程中产生谐波的问题。由于异步电动机的非线性负载特性和软起动主电路运行期间向电网注入大量谐波,严重时将导致电网电流和电压波形严重失真,从而影响其他电力设备的运转[5]。
1 一体化控制原理
异步电机软起动与谐波抑制一体化控制原理结构图如图1所示。分为软起动和有源滤波两部分。软起动系统由三相晶闸管调压电路和控制器组成,限制电机起动电流,实现电机平滑起动。有源滤波部分主要将整个软起动系统作为谐波源,并对其进行电流检测,及谐波补偿。软起动与有源滤波相结合构成的一体化控制装置,在改进电机的起动性能的同时改善了电网侧的电能质量[5]。
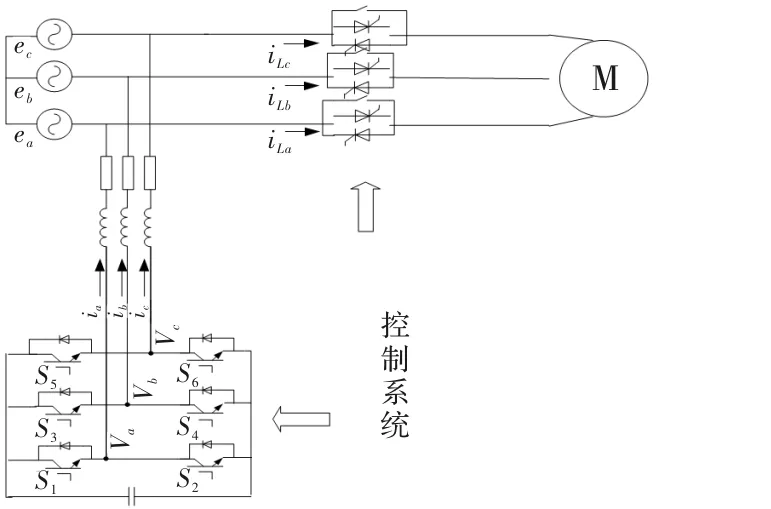
图1 一体化控制原理图
1.1 软起动设计原理及谐波分析
软起动主电路如图2所示,3组反并联晶闸管组成相控三相交流调压电路作为软起动电路的主拓扑[6]。

图2 电机软起动主电路原理图
对于带感性负载的晶闸管调压电路来说,某相中的电流电压关系大体如图3所示。
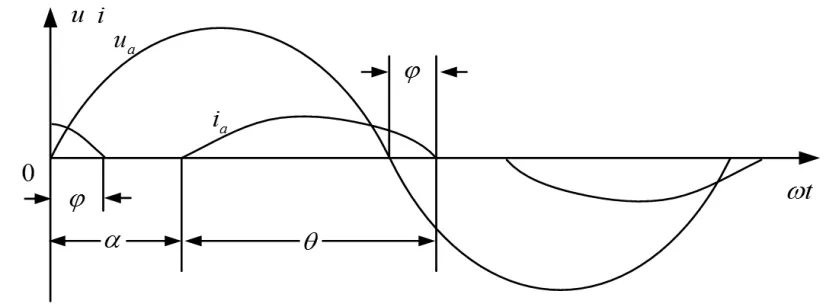
图3 晶闸管电压和电流波形
触发角α,与续流角也即功率因数角φ,晶闸管导通角θ,三者之间满足θ=π-α+φ。由上图可知θ决定了晶闸管输出电压 的大小。即:
以A相负载为例,当φ和α都一定的情况下,电路是在两相导通和三相导通之间有规律的变化。通过分析可分为两种情况。α<60°+φ和α>60°+φ对A相电压进行傅里叶级数计算,因为正负半周波形对称,所以偶次谐波为0,通过傅里叶计算得到:
当α<60°+φ

谐波次数357…THD0.6%33.1%27.4%…
当α>60°+φ

谐波次数357…THD0.8%61.1%50.4%…
通过以上分析,目前的晶闸管软起动控制器中产生的谐波以5次7次居多,而且随着控制角的增大,谐波也随之增大,必须安装滤波装置对其5次和7次谐波进行控制,以免对电网造成严重危害。
1.2 有源滤波器设计原理
针对软起动控制器中5次和7次谐波采用并联型有源滤波器,它是直接并联到电网中[7]。结构图如图4所示。
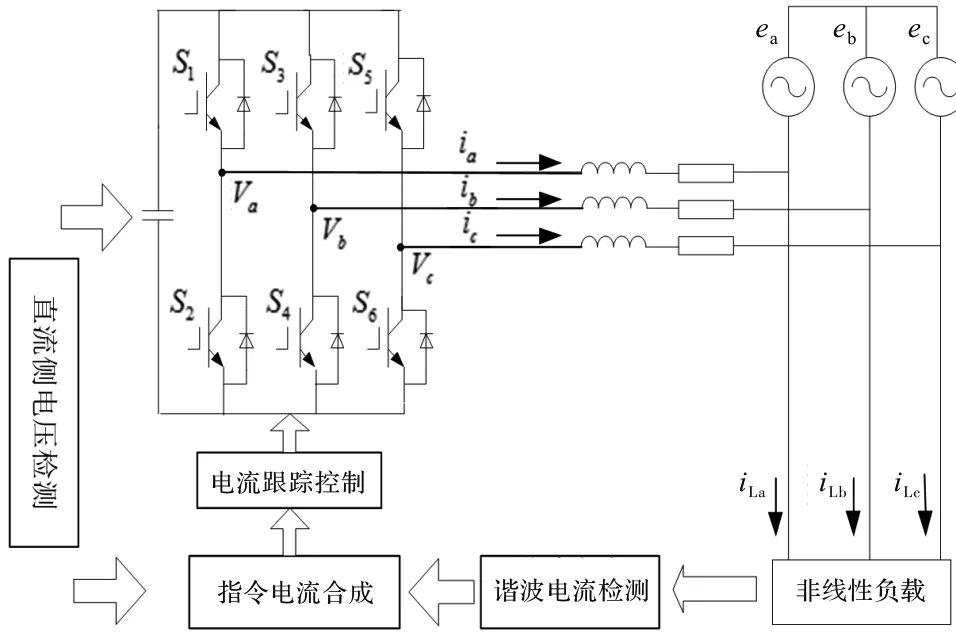
图4 有源滤波器结构图
2 建模与仿真分析
2.1 仿真模型的建立
2.1.1 软起动基于调压电路作为主电路拓扑。本文在斜坡电压起动时,将续流角作为闭环控制的反馈信号,在限流起动过程中实现闭环控制,如图5所示。并通过闭环限流控制模块来限制电流的大小,最终实现电机的平滑起动。
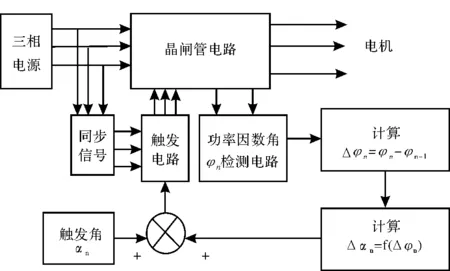
图5 功率因数闭环控制模块
2.1.2 有源滤波的电流检测算法
(1)p-q法
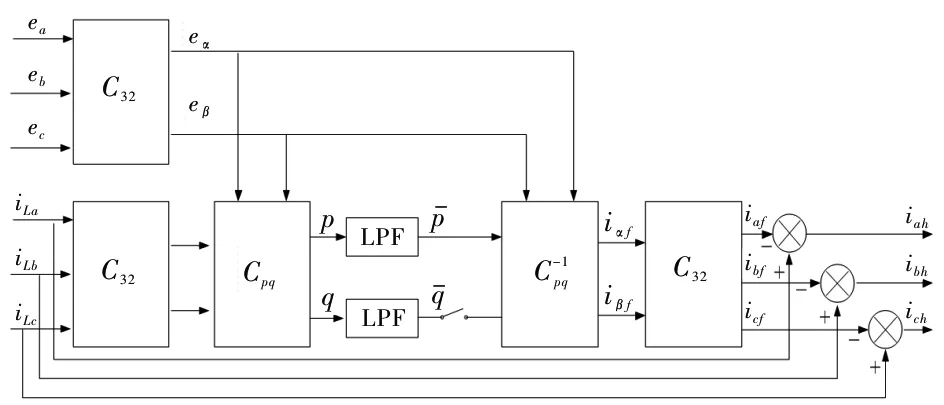
图6 p-q检测方法原理图
(2)
谐波电流iah、ibh、ich即可由式(3)变换求出:
(3)
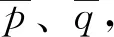
(2)ip-iq法
图7 ip-iq电流检测法原理图

(4)
经过对比采用ip-iq算法进行谐波检测,此方法能够精确检测出5次和7次谐波且实时性较好,延
时也小,且适应于电压畸形的情况,能够及时准确的检测谐波[9]。
2.1.3 电流跟踪控制

图8 电流跟踪控制原理图
2.2 仿真实验
利用Matlab/Simulik搭建整个系统的仿真,如图9所示,仿真参数如表1所示。
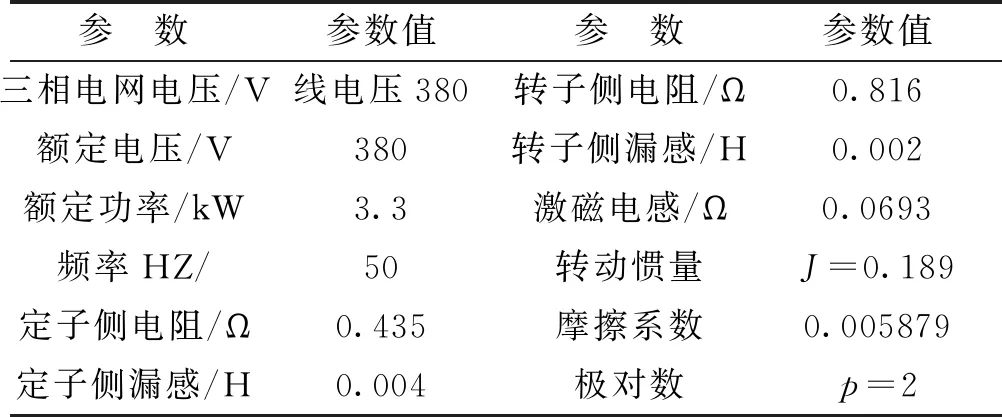
表1 仿真系统参数

图9 仿真主电路模型
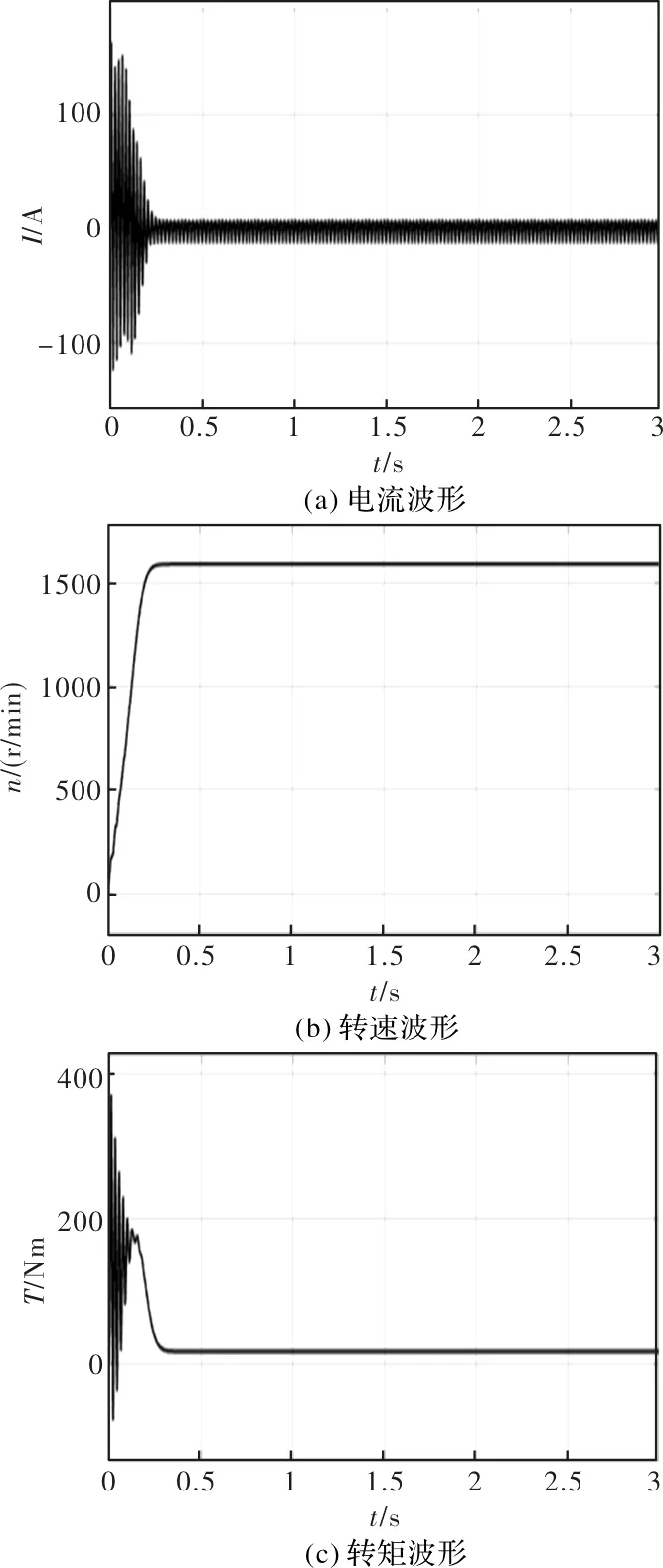
图10 直接起动波形图
从图10中可以看出直接起动初始阶段起动电流的峰值大约为130 A,约为额定电流的10倍,起动转矩在-80-380 Nm波动,起动初期电流和转矩波动较大,这种较大的波动,在起动时容易造成异步电机的剧烈震荡。严重时会损害电机并导致电网电流波形失真。
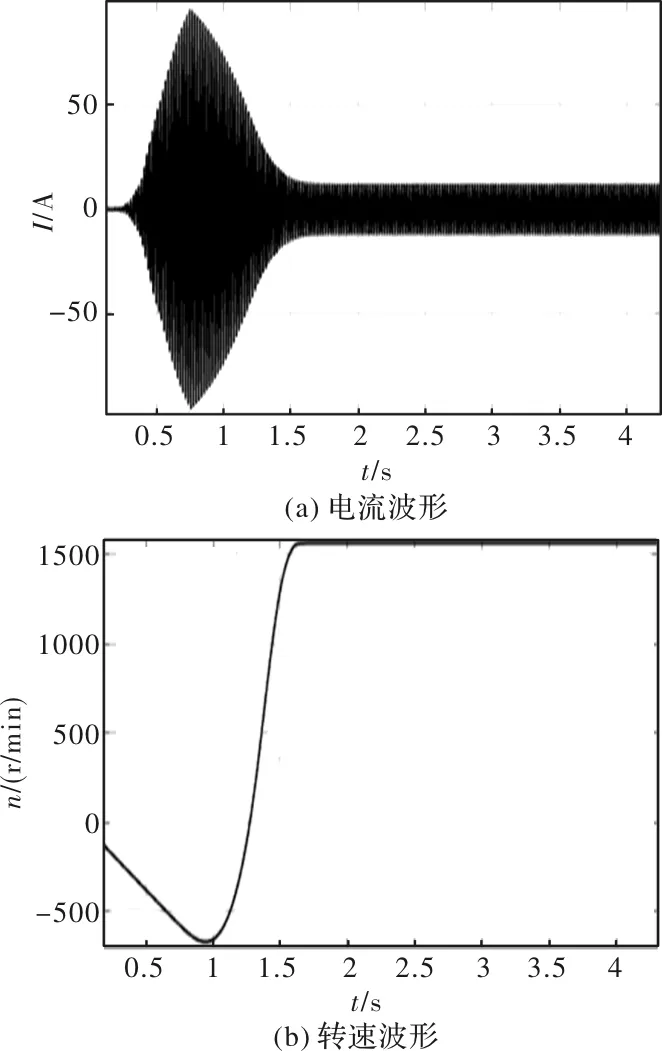
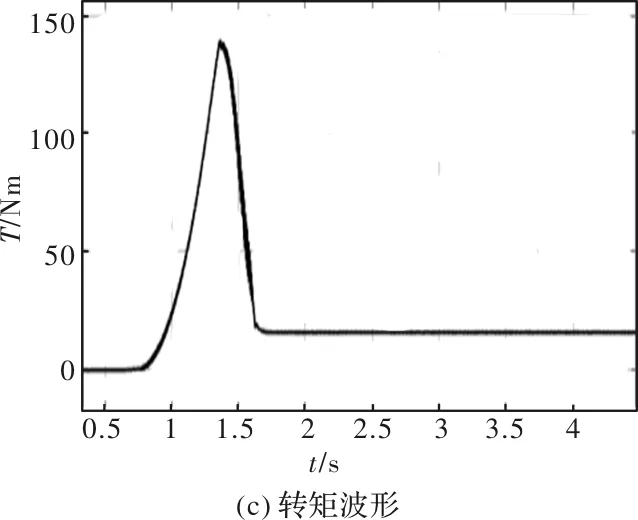
图11 斜坡电压起动
图11为采用斜坡电压软起动,斜坡电压软起动电流有效峰值为60 A,起动转矩峰值70 Nm,起动时间增加,起动过程中电流冲击相比较与直接起动得到明显抑制,但电流仍然过大。约为额定电流的5倍。
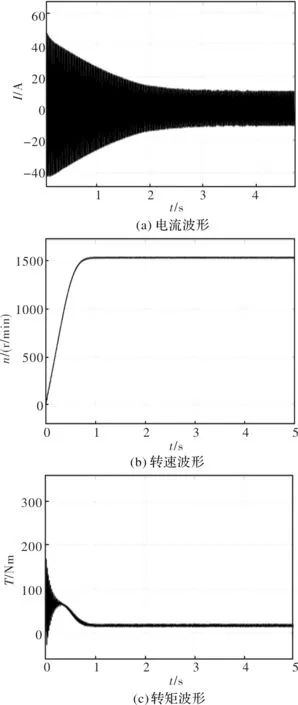
图12 一体化控制波形
图12为带有源滤波的斜坡电压加限流软启仿真结果,从图中电流波形可以看出电流波动幅度相比斜坡电压起动波动幅度明显减小,起动初始阶段电流峰值为40 A左右,大约是额定电流的3倍左右。可以看出软起与谐波抑制一体化控制,转速上升过程较为平滑,转矩也比较平稳,没有出现冲击转矩,电机可以平稳起动。
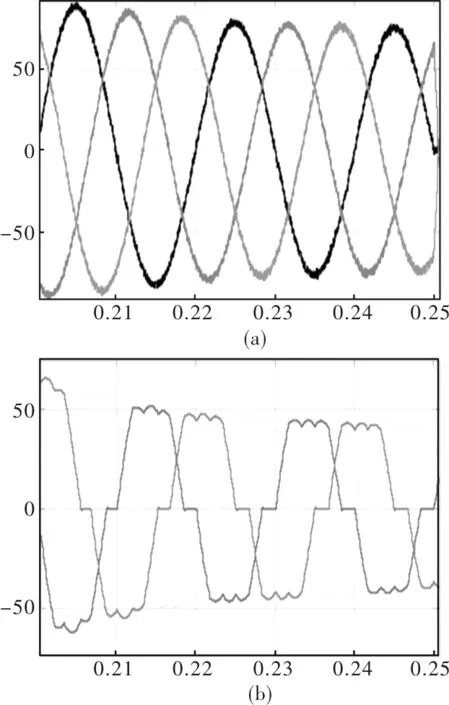
图13 电网侧电流和负载侧电流波形局部放大图比较
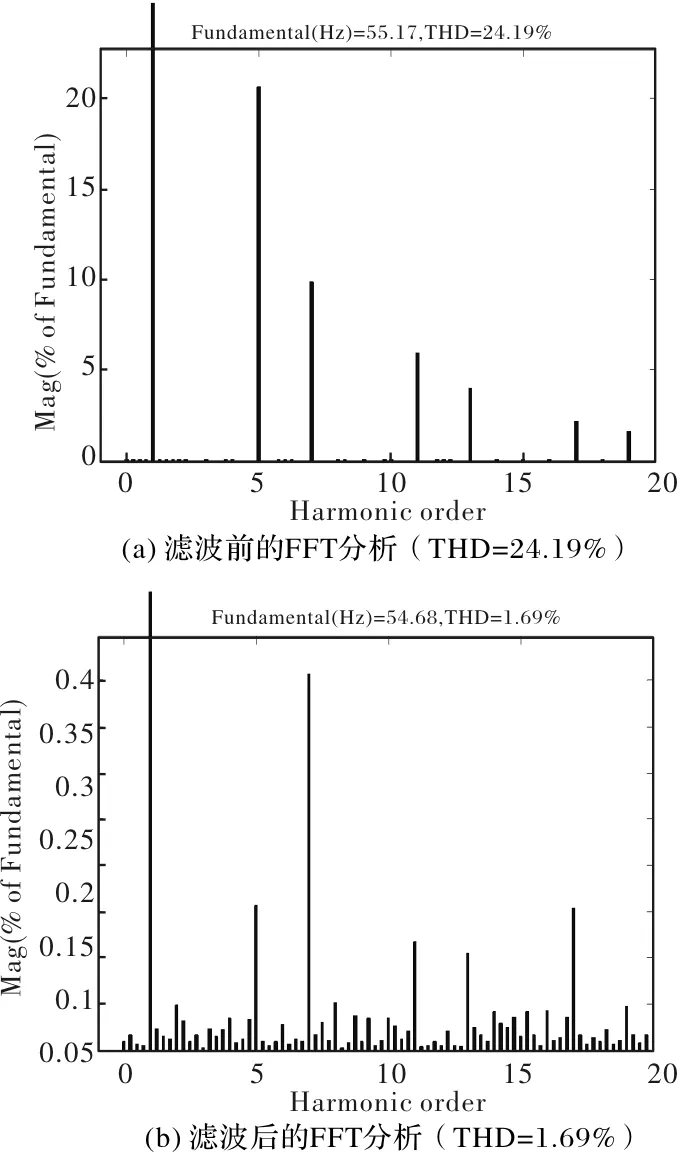
图14 FFT分析
仿真模型中采用电机整个软启系统来做为有源滤波器的非线性负载,电网电流因为电机的起动而发生严重的畸变,如图13(b)所示为负载侧的电流波形,而APF的功能便是将影响电网电流畸变的谐波和无功分量滤除掉,图13(a)则表示为通过APF滤除以后的电流波形,可以明显看出电网电流变为了光滑的正弦波。图14(a)表示为没有加有源滤波器电网侧的FFT分析图14(b)表示为加上一体化有源滤波装置后对电网电流进行FFT分析得到的THD值,可以看出电网电流的总畸变率THD由原来的24.19%降到1.69%,可以很好地达到补偿谐波的目的。
3 实 验
前面详细介绍了软起与谐波抑制一体化控制并利用仿真软件进行仿真,验证了控制方法的可行性。本节通过实验对软起与谐波抑制一体化控制理论做进一步验证。电机实验参数与仿真参数一致。
图15为软起动与谐波抑制一体化控制装置起动过程电流波形,刚开始起动电流达到40 A左右,最终电流稳定在额定电流10 A左右。没有出现冲击电流,电机可以平稳起动。
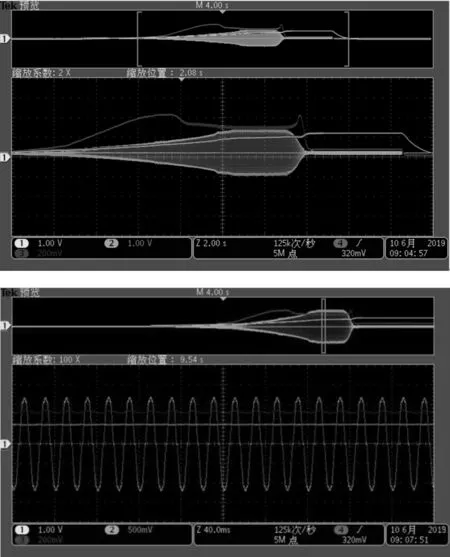
图15 电机起动电流波形图
图16(a)、图16(b)分别对a相负载侧电流和电网侧电流波形分析,可以看出电流波形基本接近标准正弦波,对谐波分量进行了很好的抑制,效果较为理想。实验结果表明对起动器造成的谐波分量进行了很好的抑制,效果较为理想。证明了实验样机可以实现APF的功能并且平稳的起动电机。
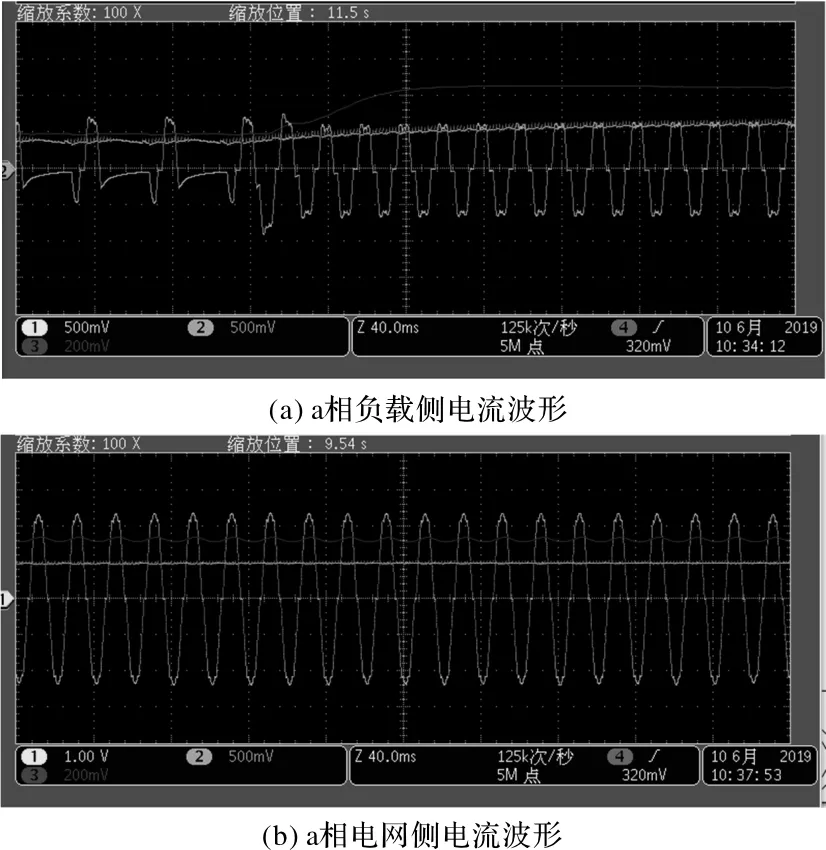
图16 电流波形图
4 结 语
本文提出了异步电机软起动与谐波抑制一体化控制,通过仿真和实验验证结果表明该一体化控制装置在限制起动电流,提高异步电机起动性能的同时,又减小整个起动系统造成的谐波,改进了电网的电能质量。将该技术应用到工程当中,可以解决由软启引起的谐波问题,电机起动不平滑,以及由于软启装置和滤波器的分离而造成的成本过高的问题。