导航技术研究进展与发展方向
2020-08-25刘新华尚俊娜
刘新华,尚俊娜
(杭州电子科技大学 通信工程学院,杭州 310018)
0 引言
导航可以分为5 个阶段,原始导航时期、指南针导航时期、无线电导航时期、卫星导航时期及组合导航时期[1]。
原始导航时期是指指南针发明前,最开始是依靠肢体语言指路,根据人的以往经验和认识指出目标的大致方向,到后来根据山、树、太阳和夜空星图等参照物进行指路,根据所依据的不同参照物来确定前往的方向。导航一词最先是源于为船指明方向,在海上航行的船只需要依靠太阳和星空来确定行驶的方向。
自宋代起,指南针的发明使导航技术进入了1 个新时期。作为4 大发明之一的指南针,古代叫司南,主要组成部分是1 根装在轴上的磁针,磁针在天然地磁场的作用下可以自由转动并保持在磁子午线的切线方向上,磁针的北极指向地理的南极,利用这一性能可以辨别方向[2]。随着朝代的更替,指南针的外观和精度不断改进,但一直使用这个原理。至今指南针仍在使用。
19 世纪至20 世纪,在麦克斯韦、赫兹、特斯拉和马可尼等人不断改进下,无线电技术日渐成熟;20 世纪20 年代,无线电导航是航海和航空的主要导航手段,第二次世界大战使得无线导航系统飞速发展。无线电导航系统是利用无线电波传播的基本原理,即无线电信号在自由空间中以光速沿直线传播,只要确定了无线电波从发射机到接收机之间的传播时间,便可以确定收发机间的距离。距离值为光速与传播时间之积。通常,导航系统包括装在运载体上的导航设备以及与导航设备配合使用的导航台[3]。
自1957 年苏联发射第1 颗人造卫星和美国研发子午仪系统后,无线电导航由陆基导航系统转变为星基导航系统,正式拉开了卫星导航的序幕。随后迎来 4 大导航系统,即美国的全球定位系统(global positioning system, GPS)、俄罗斯的格洛纳斯卫星导航系统(global navigation satellite system,GLONASS)、欧盟的伽利略卫星导航系统(Galileo navigation satellite system, Galileo)和中国的北斗卫星导航系统(BeiDou navigation satellite system, BDS)[4]。随着时代的发展,对导航性能的要求不断提高,由于地势、环境等因素,传统的导航系统存在定位误差大、覆盖区域受限等问题。
1 导航定位原理
原始导航的原理主要是参照物,例如朝着太阳的方向,在那座大山的后面等,这种导航方式存在着很大的人为因素,并且误差极大。指南针导航的原理是地磁场,磁针的北极指向地理的南极,利用这一性能可以辨别方向,这种导航方法误差还是比较大,只能辨别大致方位,还不能满足人们使用的要求。
无线电导航(陆基导航系统)的原理是利用电磁波传播特性,载体接收和处理的电参量是无线电波的相位、频率或脉冲传播时间,进而获取载体相对地面导航台站之间的距离,并建立该测量量与导航参数(载体位置)间的对应关系,然后通过解方程或者其他等效方法求得所需的导航参量[5]。下面以相位测距法为例简叙其原理,基本的计算公式为:

式中:λ为无线电波长;c为光速;f为无线电频率;w为无线电波的角频率;T为无线电传播周期。
设A和B点间的距离为d,则往返于 2 点间的接收/发射电磁波的相位差满足

根据式(1)~式(3)可得

根据式(4)可得2 点的距离为

相比于前期导航方法,无线电导航已经可实现比较精确的定位,拥有精度较高、测量方便及应用广泛等优势,但仍存在着很多问题,如就相位测距法来说存在多值性问题,须利用其他方法予以区别。
卫星导航系统的基本原理是根据多颗卫星到用户接收机之间的距离,得到接收机的具体位置。卫星所在位置已知,再通过某种手段能准确测定出地面点A到卫星之间的距离;那么以卫星位置为中心,所测距离为半径构造1 个圆球,则地面点A一定在此圆球上。若能同时测得地面点A到3 颗不同卫星之间的距离,则地面点A一定在这3 个圆球相交的点上。但很多时候3 个圆并不会交于1 点,而是会形成1 个区域,这种情况则会涉及到最优化的问题[6]。卫星导航系统的基本原理如图1 所示。

图1 卫星导航基本原理
卫星导航系统日趋完善,已经可以满足人们的基本需求,但在复杂环境下,卫星信号容易受到遮挡,导致导航精度降低,难以满足高动态实时导航的需求,所以组合导航应运而生。组合导航的基本思路就是对原卫星导航系统进行增强。如今对组合导航的研究很多,例如:惯性导航系统(inertial navigation system,INS)和 GPS 的组合导航系统,它能有效利用 INS 短时的精度保持特性,以及GPS 长时的精度保持特性,其组合后输出信息的特性,均优于单一INS 或单一GPS 的导航特性,原理如图2 所示;地磁/GPS 组合导航,利用地磁矢量校正卫星的位置和姿态测量,实现优势互补;机器视觉/GPS 组合导航,GPS 获取导航车的姿态信息和绝对位置信息,机器视觉获取导航基准线和特征点,从而克服了复杂环境下使用单一传感器进行定位时的局限性。

图2 INS/GPS 组合导航原理[7]
2 导航定位现状
4 大导航定位系统中,第1 个建全的全球系统的是美国的GPS,GLONASS 在俄罗斯快速复苏后,也快速成为全球第 2 大卫星导航系统,这 2 个定位系统的建立目均是为了军事,目前正处于现代化的不断更新完善进程中;不同于前2 者建立的目的,Galileo 是第 1 个完全民用的卫星导航系统;BDS以区域服务为起点,逐步实现全球服务,已经具备了亚太区域的导航定位、授时服务和独有的报文通信功能,目前处于全球化快速发展阶段[8]。表1为4大导航系统部分参数对比。

表1 导航系统部分参数对比
现如今导航系统的特点主要如下:
1)提高应用效率,卫星使用寿命在不断增加,从开始的2.5 a 到现在的15 a;
2)提高抗干扰能力,对于军民两用系统,抗干扰能力尤为重要,现在的抗干扰能力是最初的100~150 倍左右;
3)提高各系统的兼容性,4 大导航系统组合应用,摆脱对特定导航星座的依赖,且定位精度提高,大大增加可用性;
4)组合导航兴起,卫星导航系统与其他传感器相结合,优势互补,增强导航定位性能。
3 导航系统优化
目前导航系统的优化主要从 3 个方面入手:①对单一卫星导航系统本身进行增强;②对多个卫星导航系统进行兼容互操作;③卫星导航系统与其他系统相结合,就组合导航和融合算法方面做优化,如图3 所示。

图3 导航系统的优化
方案①:卫星导航增强技术。评价1 个卫星导航系统性能的基本要素有可用性、连续性、精度,增强技术就是对这些基本要素进行优化改良,主要分为信号增强和信息增强[9]。
信号增强是从信号本身出发,对功率、频点等进行增强。例如,采用频率分裂调制方式,在 L1和 L2 载波基础上产生了军用 M 码测距信号,可实现军用和民用导航信号分离,使重点区域的卫星信号功率为普通区域的百倍,实现资源的合理利用,且为导航战提供了技术保障,大幅度增强系统在战时的抗干扰能力[10]。
信息增强主要对精度、完好性2 个方面进行优化,主要方式是通过地面参考基准站对导航信号进行连续跟踪观测,产生差分数据和完好性信息,并通过通信链路传给用户,对原始参数进行修正或者增加冗余观察量,从而使精度和完好性大幅度提高[11]。
以GPS 为例,建立初期GPS 的定位精度只有150 m 左右,然后采用选择可用性技术(selective availability, SA),人为地将误差引入到卫星数据中,方法就是安装GPS 监测站,计算实际位置数据与接收数据的差值,然后将这个改正数播发给用户接收机进行误差修正,从而提高了定位精度,使广域定位精度达到15 m,区域定位精度优于5 m。20 世纪90 年代初中期,GPS 得以推广,随之发现由于误差源的不同,会导致精度下降严重,为此采用差分GPS(differential GPS, DGPS),分为广域差分增强和区域差分增强 2 种增强方式。在广域上推出广域差分 GPS(wide area differential GPS,WADGPS),它的原理就是对GPS 观测量的误差源分别加以区分和“模型化”,然后将计算出来的每1 个误差源的误差修正值,通过数据通信链路传输给不同用户,从而达到提高终端广域定位精度的目的。之后通过发射地球静止轨道(geostationary Earth orbit, GEO)对WADGPS 进行增强,形成广域增强系统( wide area augmentation system,WAAS)。当时1 台具有WAAS 的接收机,要比没有该性能的接收机精度提高3 m,其主要原理还是提高修正数据的准确性。25 个地面参考站收集讯号并建立校正信息,误差主要来源于卫星的轨道误差、接收机和卫星的钟差以及电离层和对流层的干扰。在区域上,主要通过设置伪卫星(布设于地面上发射某种定位信号的发射器,通常都是发射类似于 GPS 的信号),其中主要就是陆地机场专用的局域增强系统(local area augmentation system, LAAS)。至此 GPS 卫星导航系统的广域、区域完好性得以实现,并能达到米级定位精度[12]。进入 21 世纪,对 GPS 系统的增强仍在继续发展着,在 WAAS 的基础上,采用了精密单点定位(precise point positioning, PPP)授时技术,其工作原理就是误差修正,观测量为载波相位和伪距观测值,通过精密星历和钟差产品,对传播过程中的误差进行补偿,实现广域精密定位。在LAAS 基础上进一步提高精确度,将实时动态差分技术(real time kinematic,RTK)与连续运行参考站(continuously operating reference stations, CORS)相结合,采用RTK/CORS 技术使精度可达厘米级,其中RTK 技术是在GPS 测量技术的基础上,经过不断提高和完善发展而来的,在测绘领域是 1 项瞩目的技术突破成果。未来将会采用低轨卫星进行增强,并深入开拓PPP-RTK 技术的研究。上述卫星导航增强技术发展路线如图4 所示。
BDS 也正在积极发展增强系统,主要规划如表2 所示。
方案②:多系统的兼容互操作。目前,世界各国都在积极发展自己的卫星导航系统,BDS 也将在 2020 年实现全球组网,4 大全球卫星导航系统竞争格局正逐步形成,与此同时,系统间兼容与互操作问题也成必然趋势。
在全球卫星导航系统(global navigation satellite system, GNSS)兼容与互操作问题上,由于多个系统的存在,难以避免会有相互干扰的问题,这就使得系统间互操作甚至互交换变得极其重要;但 GNSS 兼容和互操作的前提是自身系统独立且完善,因此实现兼容与互操作必须以系统独立性为基础。GNSS 首先必须保证独立性和国家安全兼容性,使授权信号的安全得到保障,然后就要实现GNSS 的一般兼容性;前提是其他系统不会对自身有负面作用。当互操作达到一定程度时,用户接收机可用相同或相似的卫星信号来进行解算。具体兼容与互操作的层次关系如图 5所示。
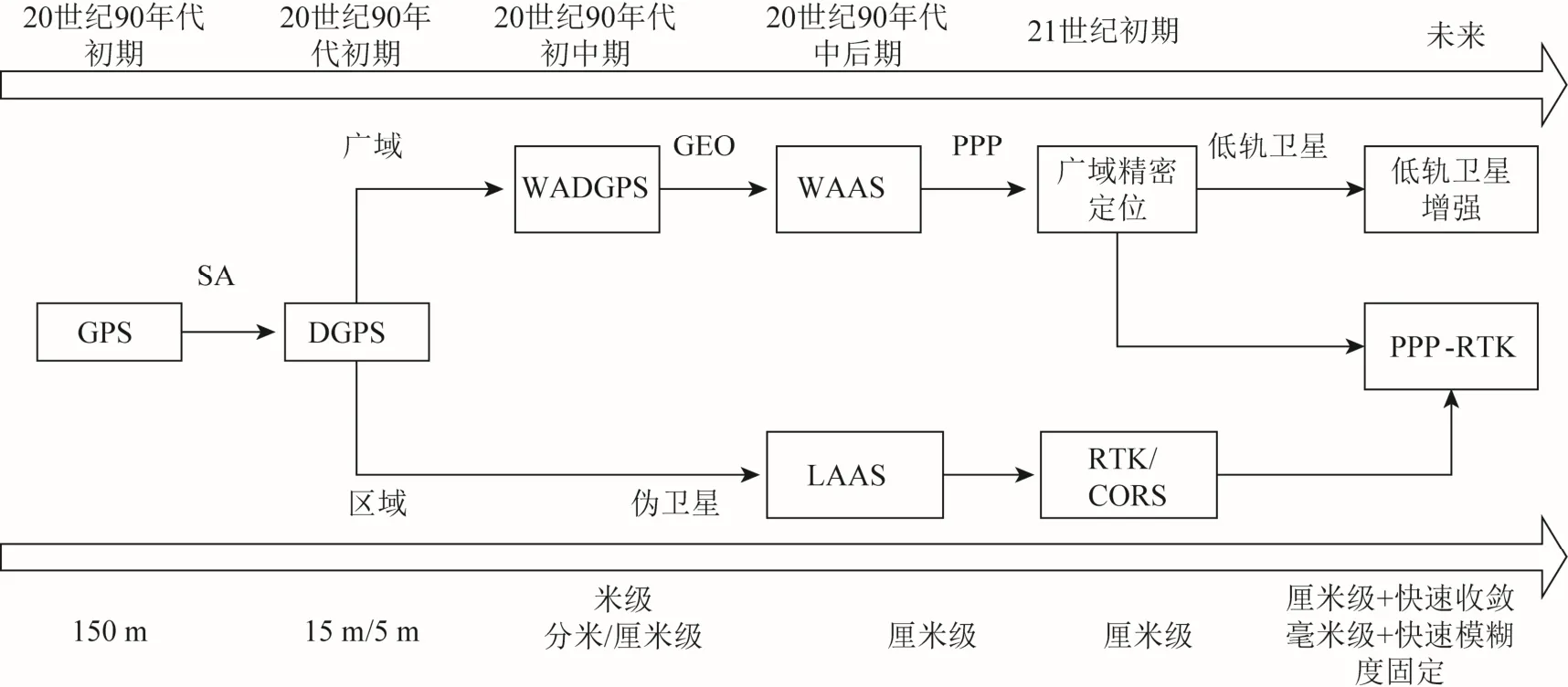
图4 卫星导航增强技术发展路线

表2 BDS 增强体系建设

图5 GNSS 兼容与互操作层次关系
2017 年11 月,在北京签署了《北斗与GPS 信号兼容与互操作联合声明》,核心内容为 BDS 与GPS 在国际电联框架下实现射频兼容,民用信号可进行互操作,之后也将持续开展2 个系统间的兼容与互操作合作。
总之,兼容性对各系统发展来说十分关键,是导航定位性能实现突破的重要方向;互操作性则对终端用户十分重要,可以很大程度上提升操作性和体验感。GNSS 服务提供商可以通过确保彼此系统间的兼容性,从而提升用户终端的互操作性,最终达到双赢。
方案③:与其他系统结合并进行优化。主要分为组合导航和融合算法,组合导航一般指硬件上的最佳组合,在同一平台上多传感器之间进行互补、互验和互校的导航系统。融合算法一般是指将多传感器数据进行处理的算法。
各种导航系统的优缺点如表3 所示。
针对各导航系统的优劣,对组合导航的研究还在不断深入:文献[13]研究了 INS/GPS 组合导航系统的卡尔曼滤波算法,基本观测量有位置、速度和角度信息,并将该组合技术应用于某飞行器,最终结果表明,角度信息作为观测量对参数的估计精度和速度计算有很大改善;文献[14]改进了融合算法,利用预报残差构造的最优自适应因子设计GPS/INS 组合导航自适应滤波器,并针对反向传播(back propagation, BP)神经网络存在的训练速度慢、容易陷入局部极小等问题,给出网络的改进算法,该算法明显提高了网络收敛速度,并在精度和可靠性方面有了明显提高;文献[15]对多源组合导航系统中存在的问题进行了探究,其中各个传感器性能和可靠性都受到外界环境的影响,这将对多源组合导航系统的鲁棒性和持续可用性造成很大程度的影响,因此在状态估计的过程中,要考虑环境导致的建模不确定性,在建模存在不确定及可能存在时变的系统噪声和观察噪声时,提出了1 种新的状态估计方法;文献[16]提出了在偏振光/地磁辅助 GPS 和惯导多系统组合时定位和姿态测量的基本原理,并推导了观测方程,证明多传感器的引入可以使系统达到改良精度的效果。

表3 导航系统优缺点对比表
由于导航系统的相对固定,对组合导航形式上的创新存在一定局限性,现如今多是对融合算法进行改进。融合算法是组合导航的核心,用于对多系统数据的处理,只有融合算法得到突破,导航系统才能得到质的改变。
4 导航发展展望
就导航系统本身来看,既要有自主运行能力,又要有组合兼容的功能。为了摆脱对美国、俄国导航系统的依赖,欧盟和中国才研究建设属于自己的导航系统,这是自主能力的体现;但长久来看,组合兼容才是实现共赢的必经之路。另一方面,导航系统本身已经有了自主运行的能力,之后就是与其他系统的兼容问题,能否依靠其他传感器或其他系统来增强卫星导航,弥补在复杂环境下卫星导航的不足,即是组合导航的课题。
就导航应用来看,目前自动驾驶和室内定位导航是导航应用的2 大课题。自动驾驶是由很多传感器协调实现的,但传感器的作用有局限性,比如激光传感器检测效果稳定,但在面对大范围的尘土时,也会无能为力。如果前面1 辆渣土车飞驰而去,引得尘土满天飞时,无人车发现“面前”全是障碍物等等。所以“高精度地图+高精度定位”的组合就可以解决此类问题,就比如在地图上规划1 个不受外界影响的“绿色管道”,车只要在这里面行驶就是正常行驶。自动驾驶不仅在技术上还存在缺陷,伦理上也面临着很大考验,所以还没有普及。对于室内定位,由于现代人有80 %的时间处于室内,因此室内定位研究很有意义,而且在室内火灾等危险情况下,室内定位技术也可以起到极其重要的作用。但由于室内环境复杂、卫星信号微弱等问题,室内定位还未实现突破。目前主要的室内定位方法有惯性导航系统、无线保真(wireless fidelity, WiFi)、紫蜂(Zigbee)以及超宽带(ultra wide band, UWB)等。文献[17]提出了1 种INS 辅助线性调频扩频(chirp spread spectrum,CSS)的高精度室内定位方法,由MPU9250 自带的磁力针规避航向角的累积误差,在CSS 非视距问题上,提出三角形3 边准则选星方法,这可以降低室内复杂环境下的影响,最后在地下车库实验,实验结果与2 种单一的定位方式相比较,性能提高了50 %以上;文献[18]就室内定位射频识别(radio frequency identification, RFID)标签发射器放置问题进行了分析,对标签位置进行了统计研究,给出了标签位置与定位系统精度之间的关系;并为了提高走廊内基于 3 元数的定位体系结构的准确性,给出了标签放置的指南。
5 结束语
导航技术在当下有着极大的需求,对其精确度和完好性要求不断提高,所以优化问题日益突出。就我国的 BDS 而言,自 2000 年发射2 颗北斗一号卫星、有了自己的导航力量起,从艰难起步到全球组网,现已实现关键器部件100 %国产化,有着极好的发展环境,正是不断学习其他成熟导航技术的优点,并依据我国地理位置及其他具体情况不断推进技术创新。同时也要注意导航技术并不仅仅指全球定位导航系统,需要从多点、多面、多系统出发,才能使导航技术快速得到突破。
